1. Introduction
The recent investigations suggest a greater prevalence of misunderstandings regarding COLREGs than previously acknowledged, as evidenced by data collected and analyzed from navigation incidents and corresponding human actions [
1,
2]. The International Maritime Organization (IMO) has designated shipping as a hazardous industry, given that accidents within the shipping sector surpass those of other industries. According to Allianz Marine Insurance, human error remains a predominant factor in marine accidents, accounting for a significant percentage ranging from 80% to 96% [
3].
The integration of current sensors and Information Communication Technology (ICT) holds the potential to substantially mitigate collisions at sea and reduce the likelihood of misunderstandings. According to Lazarowska [
4], decision support systems utilizing data from onboard sensors emerge as one of the most effective technologies, applicable across various types of vessels regardless of their year of construction.
Extensive endeavours have been undertaken to mitigate maritime incidents in response to the significant repercussions and the paramount importance of navigational safety [
5]. Within navigational safety, the crew’s situational awareness in navigation is pivotal in the decision-making process concerning collision avoidance. Reliability and accuracy of target tracking stand out as crucial considerations in collision avoidance [
6]. Certain authors have proposed the potential development of a Virtual Reality (VR) navigation support system tailored for collision avoidance purposes to enhance comprehension among the bridge team [
7].
Misinterpretations of COLREG implementation by officers of the watch (OOWs) are not uncommon, as the rules are qualitative and contingent on the specific circumstances in which they are applied [
8,
9]. Given these factors, it is pertinent to inquire about the familiarity of the OOW with COLREGs and their implementation.
The prevention of collisions at sea requires OOW to act promptly and per COLREG, thereby ensuring that vessels pass each other at a safe distance [
10]. Understanding the close-quarter situation, the minimum distance to be maintained, and the time required to reach the Closest Point of Approach (CPA) is essential for OOW. However, heavy traffic or non-compliance with regulations can increase risks [
10,
11]. Despite the presence of CPA and Time to Closest Point of Approach (TCPA) alarms, their effectiveness may be compromised, leading to the proposal of additional collision alarm systems like the “Last Line of Defense” (LLoD) [
12]. It is crucial to note that, according to the COLREGs, the vessel with the right-of-way is not permitted to undertake evasive maneuvers until the give-way vessel initiates the necessary actions within the specified timeframe [
13]. Additionally, the vessel maintaining its course is only authorized to take evasive measures if there is clear evidence that the give-way vessel is not adhering to the prescribed regulations outlined in the COLREG.
In situations where a risk of collision arises, navigators turn to the COLREG for guidance. Most OOWs know COLREG rules 8 and 13–17 that dictate the vessel’s behaviour once there is a potential collision risk [
8,
14]. However, these obligations are contingent upon the vessels’ maneuverability and can sometimes lead to a reversal of the standard right-of-way. In other words, the issue arises once those rules need to be applied while navigating in the TSS (Rule 10). When it comes to rule 10 and defining TSS, ever since its implementation, a classic qualitative risk assessment methodology has been used in the expansion evaluation [
15]. Although COLREG knowledge has improved drastically, there is still a significant risk due to the lack of understanding of how rules change once the vessel operates within the TSS [
8,
9,
14,
16,
17]. This knowledge gap underscores the need for further investigation into the application of COLREG standards and the role of seamanship in navigating within and around the TSS [
18,
19]. Therefore, defining TSS and understanding how other rules are affected once the vessel is in these waters is essential. According to Rule 10, vessels within the TSS must navigate in the general direction of the traffic flow for the designated lane. In contrast, ships that must cross traffic lanes should do it at right angles to the general direction of traffic flow, reducing the uncertainty of their intention and at the same time crossing the TSS as fast as possible. Moreover, a vessel engaged in fishing or any vessel of less than 20 m in length or a sailing vessel shall not impede the passage of a power-driven vessel navigating within the TSS. However, a vessel restricted in its ability to maneuver due to an operation aimed at maintaining navigational safety within the TSS or a vessel involved in laying, servicing, or retrieving a submarine cable within the TSS is exempt from adhering to this rule.
Since the shipping industry faces significant collision risks, developing DSS and Collision Avoidance Systems (CAS) is driven to mitigate such incidents. These systems, compliant with COLREGs, offer integrated or independent support to OOW, providing suggestions for avoiding potential collision situations [
18,
19,
20,
21,
22].
Also, recent research has focused on early detection, vessel classification, and developing collision avoidance algorithms, aiming for autonomous vessels and incorporating subjective aspects of COLREG through various methodologies [
23,
24,
25,
26,
27,
28]. These systems are increasingly acknowledged as indispensable equipment across various vessel categories, with particular significance for Maritime Autonomous Surface Ships (MASS) [
28,
29,
30]. These studies have endeavoured to quantitatively evaluate and integrate the subjective elements of the COLREGs using diverse methodologies, including reinforcement learning, neural networks, optimization techniques, fuzzy logic, and Bayesian networks [
24,
29,
30,
31,
32,
33,
34]. Some authors even suggest approaches of COLREG compliance evaluation through specific scenario classification to support collision avoidance systems, which include numerous Autonomous Surface Vessels (AVS) and crewed traditional vessels [
35,
36,
37,
38].
Many founded projects, such as Avoiding Collisions at Sea Plus (ACTS+), and the Autonomous Shipping Initiative for European Waters (AUTOSHIP 2020), highlight the importance of addressing the misunderstanding of COLREG rules and establishing decision support systems for unmanned ships. A decision support tool compliant with COLREG, aimed at averting collisions at sea, emerges as a crucial outcome of advancements in maritime technology and the driving forces. Most of the authors are concentrating on researching autonomous navigation systems and how to incorporate COLREG-compliant DSS within autonomous navigation. The main challenge is still in the manned navigation and DSS that will provide timely and accurate COLREG information to the navigator. This tool proves vital during this transitional phase, where the constructive interaction between human interpretation and decision support systems becomes inevitable and invaluable. The evolution of DSS for ship trajectory planning, whether as direct decision-making or just as aid tools, has become increasingly prominent [
29]. Additionally, sophisticated computer-based simulators are employed by many researchers to simulate diverse collision scenarios, predicting specific ship maneuvers [
12,
37,
39,
40,
41,
42,
43].
According to Zaccone and Martelli, some decision support systems for ship navigation, such as Collision Avoidance Systems (COLAV) or Automatic Identification Systems (AIS), can integrate route planning and risk assessment tools [
34,
44,
45]. Such a system’s primary objective is to mitigate the risk of collision between two or more ships by employing sensors to detect and identify nearby objects. By analyzing collected data, the system assesses the likelihood of a collision and recommends the appropriate evasive action required. Additionally, it can alert the navigator or autonomously execute maneuvers to prevent accidents when a risk is identified.
As part of the Integrated Navigation System (INS), the Electronic Chart Display and Information System (ECDIS) consolidates information from various sources into a single platform, offering a centralized navigation system for voyage monitoring. Considering this, it is essential to explore the integration of the proposed DSS Architecture with ECDIS. Despite the acknowledged complexity of the existing ECDIS [
46] by several authors and concerns regarding overreliance and potential failures [
47,
48,
49,
50,
51], there is a consensus that developing an integrated and comprehensive system is crucial for future navigational technologies. Given the advancement in maritime technology and recognized needs, the authors advocate for including a COLREG-compliant decision support tool as part of the INS to enhance collision prevention and bring the shipping industry one step closer to the MASS technology (degree One).
This paper is structured as follows: In
Section 2, a relevant literature regarding navigational decision-making and the COLREG Rule 10 application is reviewed. The survey methodology and results are presented in
Section 3, which highlights the knowledge gap among marine experts.
Section 4 introduces a decision support system architecture for bow crossing scenarios within TSS, which was created in response to the suboptimal results regarding Rule 10. The study is finally brought to a close in
Section 5 by integrating the main findings and discussing implications for decision support and navigational safety.
2. Survey Methodology
The existing body of research concentrates on general maritime conditions with limited attention to specialized environments like TSS waters. Moreover, many previous studies overlook the adherence to COLREG standards, specifically Rule 10, which governs vessel navigation in TSS areas. Therefore, an international tailor-made survey has been conducted among marine industry professionals with diverse experience and expertise (
Appendix A).
This chapter outlines the research methodology employed by an international online survey learning platform. The survey targeted maritime experts and was designed to gather insights into their understanding of specific COLREG rules, focusing on Rule 10. Based on the previous project, ACTs, an international survey has been developed with the maritime stakeholders. The survey’s primary objective was to elucidate the respondents’ comprehension and implementation of Rule 10. The pointed questions for this research have been used related to the COLREG Rule 10, aiming to assess respondents’ knowledge and experience regarding the application of the Rule. The survey method followed a questionnaire model, allowing for multiple answers with only one correct response. For the development of the questionnaire, navigational scenarios were created on the FMB Wärtsilä—Transas Marine Navi Trainer Professional (NTPro) 5000 [
8]. The resulting simulations were exported and integrated into the questionnaire. Furthermore, data collected from the respondents through the survey questionnaire were analyzed using ANOVA to evaluate the statistical distribution of correct answers and identify trends in knowledge across experience levels and vessel types. A group of 415 experienced professional seafarers, including Master mariners, officers of the watch (OOWs), and other maritime stakeholders: Deck Cadets, Pilots, Vessel Traffic System (VTS) operators, Yacht masters, Navigation auditors, and surveyors, participated in the survey. Almost two-thirds of all respondents consist of OOW and ship masters, which provided a strong base of qualified and experienced personnel.
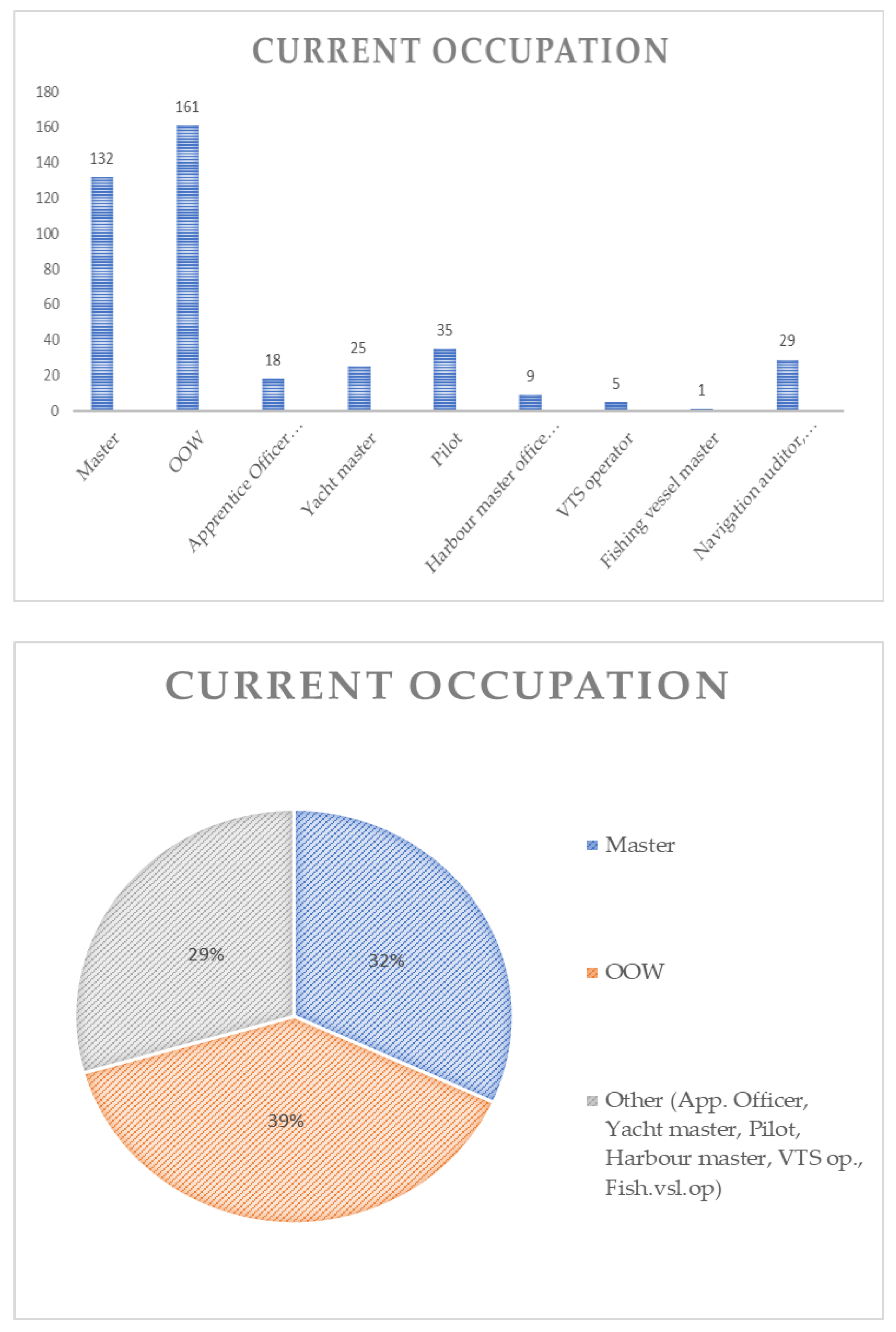
The formulation of the survey was deliberately designed to directly address the subtleties of COLREG regulations, specifically Rule 10, to gather responses that clarify whether the respondents understood these rules. The first part of the survey considers personal profile questions (PPQ), which are categorized into four equally significant demographic variables: vessel type experience, age, occupation, and sea-going experience. A bar chart was used to illustrate the survey structure, which provides insight into the respondents’ profiles and backgrounds, as shown in
Figure 1.
Furthermore, the survey’s primary focus was highlighted by a thematic breakdown of rule understanding questions (RUQ) concerning TSS entry conditions, right-of-way determination, overtaking behaviour, and TSS applicability. Out of all questions concerning rule understanding, the right-of-way determination has been recognized as crucial, based on which the proposed DSS Architecture logic was designed.
The survey results will be critical input data for developing the decision policy. However, using this approach, we can also identify areas where more education or training may be required to improve maritime safety and compliance with COLREG laws, enabling a concentrated evaluation of important aspects of marine navigation.
3. Survey Results—Knowledge Gaps in Rule 10 Application
The survey findings are categorized into personal profile and rule understanding questions. Through a custom-designed questionnaire, respondents are assessed to ascertain their professional experience and grasp of COLREG. The collected data offers valuable insights into the respondents’ comprehension levels and expertise, enabling us to pinpoint areas of deficiency in understanding specific scenario-based COLREG rules. Conclusions drawn from the survey data serve as the foundation for further analysis and improvement in maritime safety protocols.
3.1. Personal Profile Survey Results
In this part of the survey, the findings offer a comprehensive glimpse into the respondent’s profile, delineated by four key personal inquiries, including current occupation, age, experience, and recent vessel type. The dataset sourced from 415 participants is visually presented through tables and meticulously expounded upon for each Personal Profile Question.
The data in
Table 1 yields valuable insights into the occupational distribution and diversity of experience among respondents, giving us a solid data foundation. Most 415 respondents belong to the OOW category, closely followed by Masters, providing a strong experience base. These two categories account for a significant percentage, encompassing two-thirds of all participants, considering two core bridge team management roles. Additionally, other diverse specialized maritime professionals should also be pointed out, collectively presenting one-third of the surveyed population.
Furthermore, as illustrated in
Table 2, the analysis collectively presents a comprehensive overview of the age distribution among participants, contributing to a deeper understanding of the composition of the respondents. The spread of respondents’ ages tells us that most are people in the middle to senior career stages who have been in the industry long enough to face real-world COLREG applications.
The predominant group comprises individuals boasting over a decade of seafaring expertise, totalling 237 respondents. Conversely, a minority, represented by merely eight individuals, possesses less than half a year’s seagoing experience (
Table 3). Noteworthy is respondents with over five years and over one year of seafaring background, underscoring that nearly 70% of all participants possess substantial seafaring background, which brings skills, not just theoretical maritime knowledge. The spectrum of seafaring experience varies widely, encompassing individuals with minimal months of experience and those with extensive tenure at sea. These diverse experience levels are relevant when examining the intricacies of COLREG regulations.
Understanding the distribution of seagoing experience across various vessel types could provide valuable insight into skills and knowledge acquired by respondents within the maritime field. While the majority of almost 50% of the surveyed population has sea-going experience on tanker vessels and container vessels, followed by a notable experience equally shared on general cargo, bulk carriers, yachts, passenger vessels, and other specialized vessels, a small fraction had experience on fishing vessels, which highlights a significant underrepresentation of this segment. The respondents’ profile, as illustrated in
Table 4, enhances the reliability of the survey’s findings, given that these vessels frequently navigate within the TSS, where Rule 10 is critically applied, which increases the relevance of collected responses to the operational context under examination in this study.
Summarizing the collected PPQs data statistics, the only profile component that substantially impacts the understanding of Rule 10 is practical seagoing experience, which is included in the main question survey results (RUQs). Age, occupation, and vessel type did not exhibit significant enough correlations to be considered strong predictors. However, they provide insight into the diversity of experience among the surveyed population.
3.2. Main Question Survey Results
This section elucidates the proficiency of the surveyed population across five inquiries about COLREG Rule 10, which addresses protocols concerning vessel conduct in or near Traffic Separation Scheme scenarios. It furnishes a comprehensive assessment of the practical application and comprehension of the rule among respondents.
The subsequent examination offers an encompassing assessment of respondents’ performance concerning inquiries (RUQ1–RUQ5) on COLREG Rule 10, which delineates regulations for navigation within Traffic Separation Schemes (
Appendix A).
By assessing RUQ1’s findings, the presented data addresses the query regarding the circumstances under which a vessel is permitted to enter or cross the separation zone. As per the “Rules of the Road” and in alignment with COLREG, the correct interpretation stipulates that a vessel may enter or cross the separation zone in the instance of an emergency, imminent danger avoidance, or when engaging in fishing activities within the separation zone. It is clearly stated in the COLREG that vessels cannot enter TSS under any circumstances; they should join or leave at the termination of the lane and at as small an angle to the general direction of the traffic flow as practicable. On the other hand, when it comes to crossing, it should be on a heading as practicable at right angles to the general direction of the traffic flow. The understanding of Rule 10 is distributed evenly between respondents. Most respondents (52%) provided the correct answer, while the remaining 48% answered incorrectly, indicating a discernible gap in understanding Rule 10. From a statistical perspective, these results show that more than one in every two seafarers demonstrates precise conceptual knowledge of the rules. The almost equal proportion of wrong answers highlights a bimodal distribution of knowledge that different interpretations or uneven training and education levels may impact. While scores above 70% are considered indicators of solid rule comprehension, this 52% accuracy rate falls below the average competence threshold expected of a qualified seafarer. The cross-analysis between respondents’ occupation/rank and their understanding of the TSS entry/crossing condition reveals more profound insights into their comprehension of the Rule. As illustrated in
Table 5, all occupational groups had variable results. The data shows that OOWs directly involved in watchkeeping duties tend to have a more accurate and consistent understanding of Rule 10 compared to the more senior or specialized roles, even though the results varied across all occupational groups, indicating the need for regular refreshment of the particular COLREG Rule.
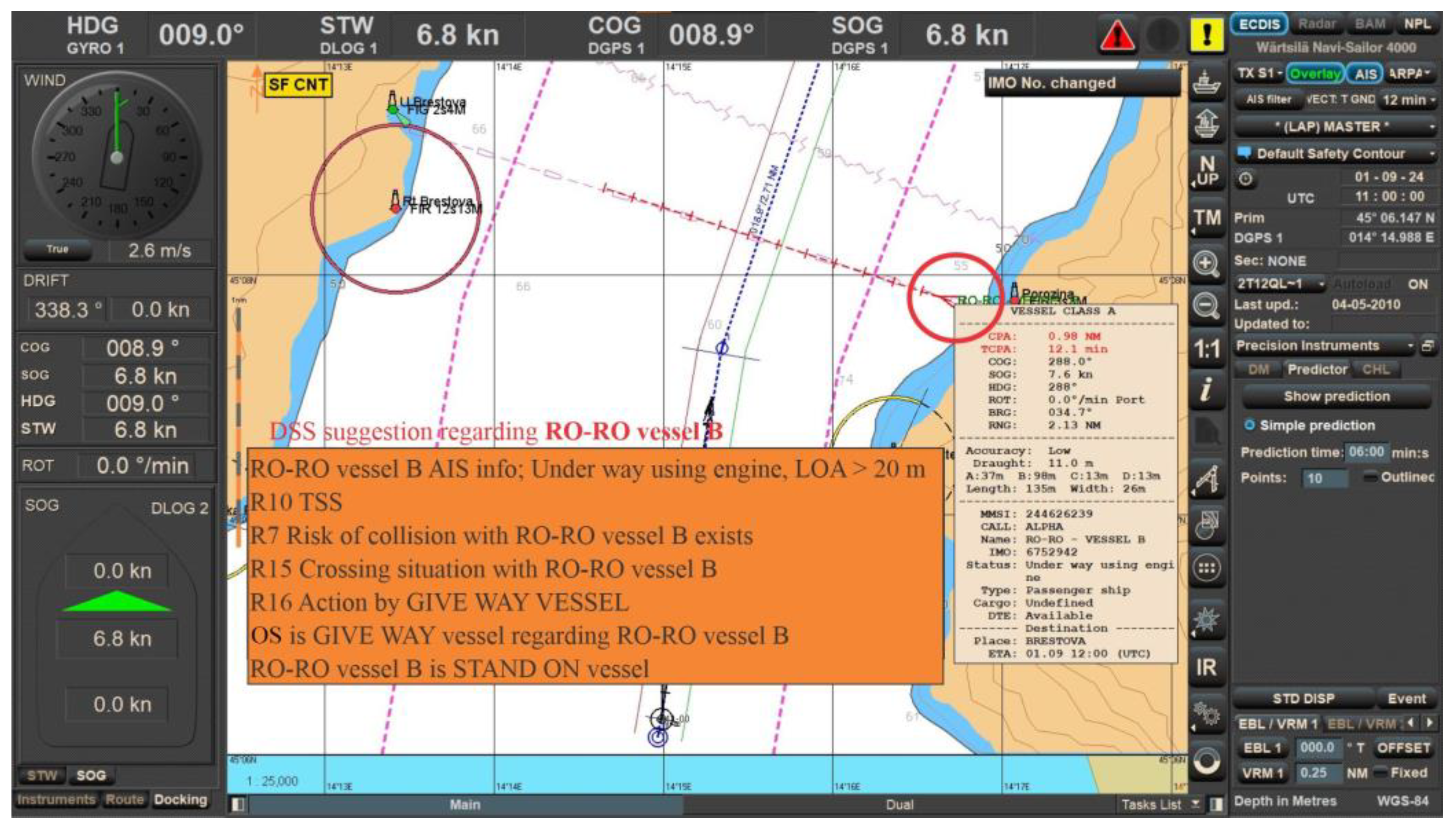
Based on the evaluation of RUQ2 results, which is related to the understanding of Rule 10, specifically regarding the actions to avoid the collision, to decide which vessel stands on in a particular scenario involving a power-driven vessel A navigating in the traffic separation scheme lane and power-driven vessel B on her starboard side crossing the separation lane, the following conclusions were made. The accurate response, which recognizes vessel B as a stand-on vessel, reflects a comprehension of maritime regulations. However, the erroneous selection made by 62% of respondents highlights the significance of thorough training and adherence to COLREG to uphold safe navigation within TSS. In the context of TSS Rule 10, vessels must still adhere to the principles of crossing Rule 15. This means that even if a vessel is navigating within a TSS, if it encounters another power-driven vessel crossing its path with a risk of collision, the crossing rule must be followed to ensure navigational safety and avoid collision. Furthermore, as illustrated in the
Table 6, the relationship between occupational roles and the interpretation of the rule of understanding question 2 reveals a significant disparity in comprehension within professional groups. OOWs demonstrate a comparatively better comprehension, with nearly half providing a correct response. At the same time, Masters and professionals in the other category exhibited a significantly lower accuracy rate, with most of both categories selecting the incorrect response.
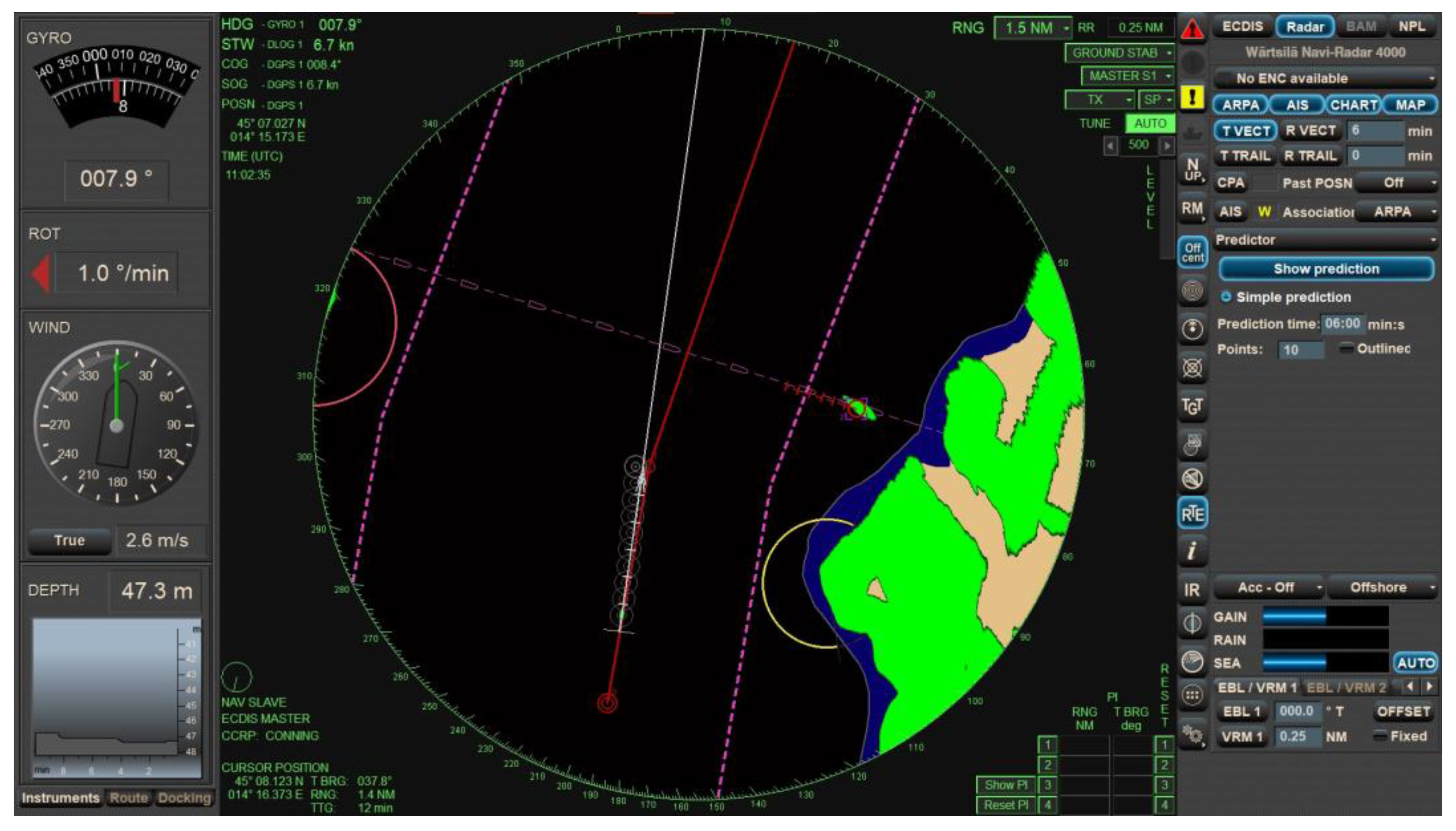
The results revealed that understanding Rule 10 may deteriorate outside the context of frequent navigational watchkeeping duties. These findings further support the importance of ongoing rule-specific training, particularly for the roles that may not directly and regularly interact in navigational rule assessments during everyday operations, even though they are experienced. Furthermore, in
Figure 2 and
Figure 3 are visible examples of a survey question: RUQ2—FMB Wärtsilä—Transas Marine, by using Navi Trainer Professional (NTPro) 5000, Wärtsilä Navi-Sailor 4000 and Wärtsilä Navi-Radar 4000.
Additional concerns can be drawn from the evaluation of RUQ3 results (
Table 7). This question pertains to understanding the actions in a specific scenario and which vessel should act to avoid collision. Most respondents (73%) incorrectly identified the tanker vessel as the vessel responsible for taking action to avoid the collision, citing the presence of the passenger vessel approaching from the starboard side. Conversely, only 27% of respondents correctly recognized that the action to avoid collision should be taken by the passenger vessel, as both vessels are navigating within a TSS. Again, there is an apparent misunderstanding between Rule 10 (TSS) and Rule 15 (crossing). Although the passenger ship is on the starboard side of the tanker vessel and crosses at its bow and TSS, the critical fact is the length of the passenger vessel (18 m). As indicated in Rule 10, a vessel of less than 20 m in length should not impede the safe passage of a power-driven vessel following a traffic lane. This evaluation underscores a significant misconception among respondents regarding the responsibility for collision avoidance in traffic separation schemes. It highlights the necessity for enhanced education and awareness regarding the principles outlined in the COLREG to ensure safe navigation practices within such maritime environments. Analyzing the impact of occupational background on replies to RUQ3 indicates that all professional groups generally struggle to apply Rule 10 to more complex navigation situations. The majority of Masters and OOWs selected the wrong answers, suggesting that even among experienced navigators, understanding vessel priority in more complex traffic situations remains inconsistent.
In the provided scenario for RUQ4, where two vessels are navigating within a traffic separation scheme, a container vessel is overtaking a bulk carrier on a parallel course. To increase the safe distance among vessels, the question is whether the container vessel is permitted to enter the opposite traffic lane. Surprisingly, the responses are evenly distributed; half of the respondents correctly stated that the container vessel is not allowed to enter the opposite traffic lane under normal circumstances. Conversely, 51% of respondents incorrectly assert that the container vessel could enter the opposite traffic separation lane if no vessels were present in it. It is clearly stated in Rule 10 that the vessel shall proceed in the appropriate traffic lane in the general direction of traffic flow for that lane. In summary, a vessel is not allowed to navigate in the opposite direction within a TSS, except under emergencies or specific operational constraints. This outcome reveals a significant lack of consensus among respondents regarding interpreting maritime regulations concerning vessel maneuvering within traffic separation schemes. It underscores the importance of enhancing knowledge and understanding of these regulations. Though understanding gaps still exist, the percentage of correct and incorrect answers among occupational categories is evenly distributed, as indicated in
Table 8. OOW outperformed the other occupational categories, with more than half correctly identifying the course of action in the overtaking scenario. Notably, Masters and respondents in the other category were marginally poorer, with more incorrect answers than correct ones. Once again, the results suggest that although the overtaking rule is better understood than other aspects of Rule 10, there is still a substantial uncertainty in rule understanding, especially among those not actively involved in navigation watch keeping. It emphasizes a common theme that having a practical knowledge of real-time navigation may improve the accuracy of rule interpretation, reinforcing the necessity of hands-on training for all ranks.
In the scenario provided for RUQ5, the question pertains to which vessels are mandated to utilize traffic separation schemes. As illustrated in
Table 9, most of the respondents incorrectly identified that all power-driven vessels, except those under 20 m in length, fishing vessels, and sailing vessels, are required to use separation schemes. However, the accurate response, chosen by only 12% of respondents, specifies that all vessels obliged under rules established by the appropriate authority should utilize traffic separation schemes. This discrepancy in responses highlights a considerable misunderstanding among respondents regarding the vessel’s mandate to use TSS. Surprisingly, the reaction to the applicability of the TSS to different vessel types reveals a general lack of knowledge and clarity across all occupational categories. The correct answers rate was especially low for Masters and professionals in the other group, including pilots, deck cadets, and VTS operators. This implies that even among experienced maritime professionals, there is a lack of understanding of the differences between the vessels covered by Rule 10.
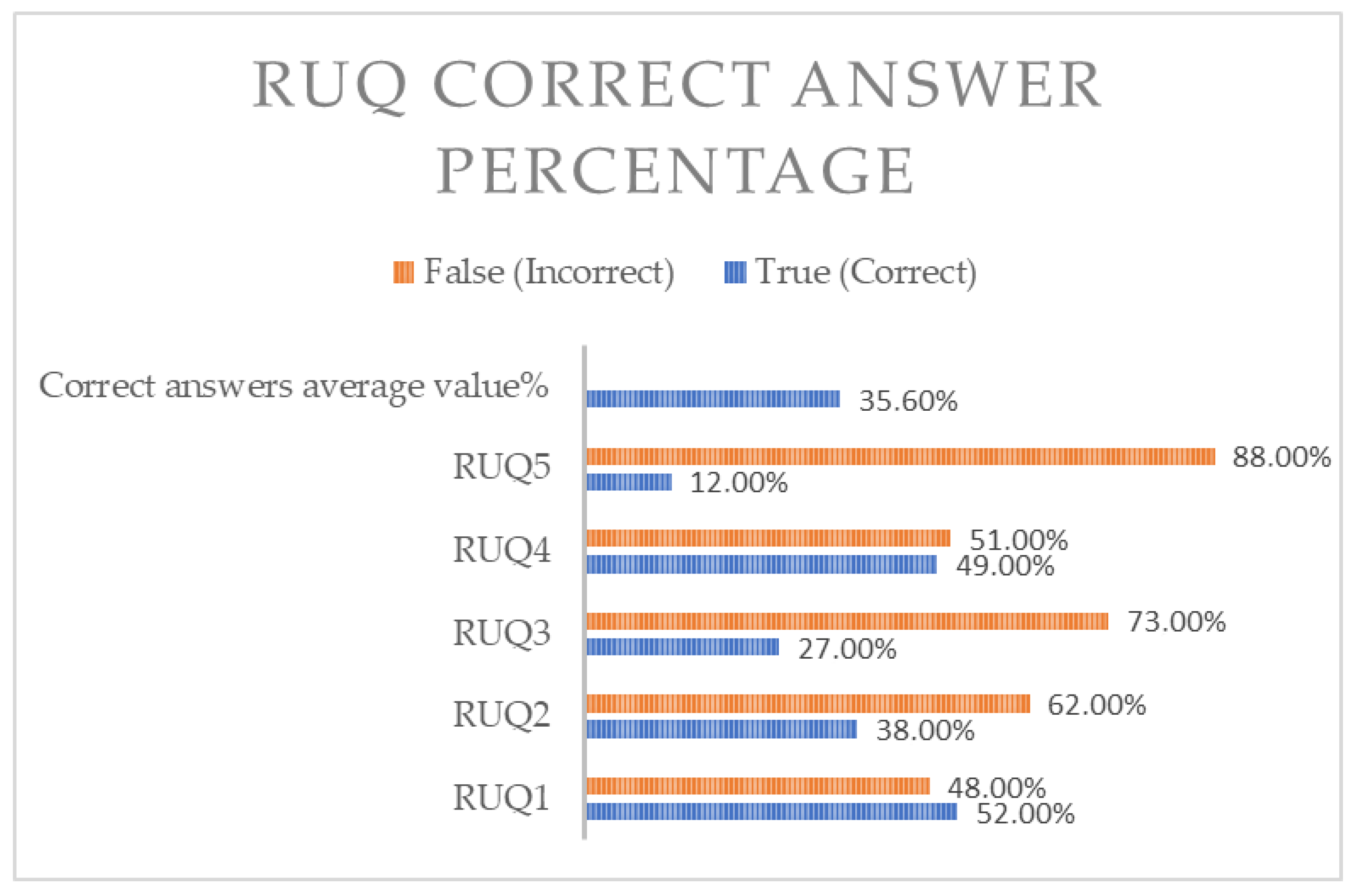
The data gleaned from the survey is consolidated in
Figure 4, presenting the tally of accurate and inaccurate responses for each question (RUQ1–RUQ5), along with the corresponding percentage of correct answers and the aggregated average value. The chart highlights noticeable variation in respondents’ understanding of COLREG Rule 10 across five scenario-based questions.
Respondents’ performance highlights a notable knowledge gap, particularly when considering more complicated scenarios. The overall understanding of Rule 10 is suboptimal, with a very low average correct answer rate of only 36%. In particular, the respondents exhibited misconceptions or deficiencies concerning specific scenarios associated with the Rule. The results suggest that while most respondents understand the fundamental concept of Rule 10, more complex applications lead to misunderstandings. The average rate of correct responses across all questions is considerably lower than the confidence level, which indicates persistent gaps in applied knowledge that may affect the safety of navigation in the TSS.
3.3. Results Probability for Insight into Rule 10 Understanding
To determine if there is a statistically significant correlation between the respondents’ professional roles and their knowledge of Rule 10 (as determined by RUQ1–RUQ5), the chi-square (
) test of independence has been applied, each with two degrees of freedom (
df). The chi-square test determines whether the distribution of observed frequencies deviates from expected frequencies under the chi-square statement. In this context, the chi-square statement assumes that more than half of the respondents know COLREG regulations well. The general mathematical formula used for the chi-square statistic:
where
O stands for the observed frequency, and
E for the expected frequency assuming the independence of the equation. The test’s degrees of freedom
df were calculated as follows:
where
r is the number of occupational categories (three), and
c is the number of answer types (Correct, Incorrect), resulting in two degrees of freedom.
To determine statistical significance, a standard significance threshold of
α = 0.05 was used, and the probability of obtaining a test result
p-value was calculated by use of the cumulative distribution function of the chi-square distribution, by assuming the following:
Results summarized in
Table 10 indicate that the chi-square statement received high statistical support based on the aggregated performance of 2075 answer responses, revealing that Master and other professionals were outperformed by OOWs across all rule understanding questions, averaging 43% correct answers. As illustrated in
Table 11, chi-square values varied from 18.19 to 99.12, which are far larger than the critical value of 5.991 provided from the chi-square distribution table, and with corresponding
-values from 0.0001 to 2.8679 × 10
−22, all of which were well under the standard of significance level of
α = 0.05, the test results support the rejection of our chi-square statement, meaning that more than half of the respondents do not have good knowledge of COLREG regulations.
The results support a statistically significant relationship between understanding of Rule 10 and the professional roles of respondents, indicating that experience and professional role influence how the COLREG rules are misinterpreted.
With an value of 18.19, the first test resulted in a -value of 0.0001, well below the conventional 0.05 significance threshold, which strongly suggests that the observed variations in response accuracy are not the result of random variation, as it is statistically significant at the 0.0001 level. Such a result does not support the chi-square statement that respondents’ rank impacts the assessment of the proper implementation of Rule 10.
The results of the second test produced an extremely small of 3.9384 × 10−18 and an even larger value of 80.15, which revealed a highly significant difference in response distribution among groups, most likely reflecting substantial differences in knowledge of the Rule.
With a -value close to zero, of 2.8679 × 10−22, and a score of 99.21, the final test revealed a statistically significant correlation among the variables. This indicates that the professional role of all experts is strongly associated with their misunderstanding of Rule 10. As a result, the test categorically rejects the chi-square statement.
Overall, these results validate the statistical significance of profile-specific performance differences and offer numerical proof in favour of integrating a DSS system that can supplement knowledge gaps in real-time navigation, especially in the case of a collision in a crossing situation. The results also reveal strong statistical evidence that respondents’ professional role directly influences the ability to correctly apply the Rule, highlighting that respondents with continuous watch-keeping duties (OOW) have better knowledge and understanding of Rule 10 of COLREGs.
While overall results indicate that the fundamental knowledge and concept of COLREG Rule 10 among navigators is understood, more complex scenarios, such as crossing situations in the TSS, have proven to be more challenging. This conclusion highlights a knowledge gap that presents a potential risk for navigational safety and imposes a need for additional decision assistance mechanisms, such as the DSS Architecture for the Bow Crossing Collision Avoidance Process proposed in this study. To highlight these deficiencies, we developed an architecture focused only on bow crossing scenarios, which will provide structured guidance to the navigators, enhancing decision-making where understanding is often insufficient.
Furthermore, the next chapter will explore the COLREG Rule 10 specific hierarchical decision-making model scenarios where different vessel types cross the own vessel’s bow, considering that the own vessel is navigating in the TSS in the general direction of traffic flow. This integration aims to enhance navigators’ safety awareness, improve maritime navigation safety, and reduce the likelihood of collisions at sea.
4. DSS Architecture for the Bow Crossing Collision Avoidance Process
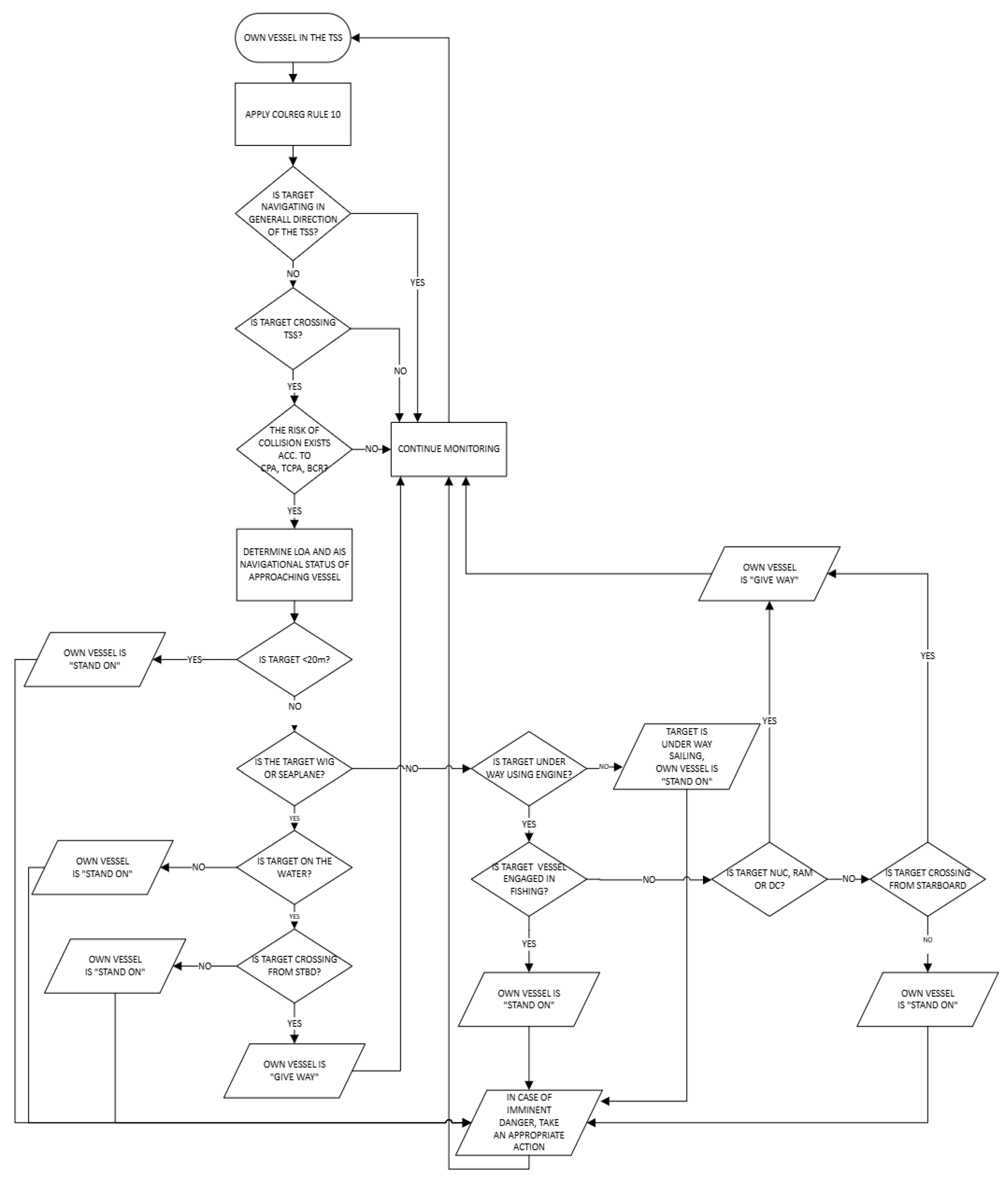
Based on the identified need for decision support, in the following section, we introduce a DSS Architecture for the Bow Crossing Collision Avoidance Process that will enhance awareness of navigators regarding Rule 10 application in crossing situations. A vessel navigating in a TSS must comply with the general principles of COLREG Rule 10, which includes proceeding in the general direction of traffic flow, avoiding anchoring within the TSS, and exercising caution when joining, leaving, or crossing the lane. Therefore, the specific architecture is designed to support decision-making on the obligations of the own vessel (OV) navigating in the TSS concerning bow-crossing situations of various types and vessel statuses, presented in
Figure 5. Additionally, the design of the proposed DSS Architecture is based on COLREG Rule 10 with contextual reference to Rule 7, Rule 15, Rule 16, Rule 17, and Rule 18.
Compared to earlier studies, one of the key advancements of the proposed DSS Architecture is the system’s ability to consider the navigation status of vessels in line with COLREG Rule 18 (responsibilities between vessels), which guarantees an accurate and regulation-compliant decision-making process [
42,
43,
44]. Additionally, the proposed DSS Architecture enables a sophisticated navigational response that reflects real-time maritime dynamics by recognizing the vessel’s length overall from the AIS navigational status report. Furthermore, the Fall-Back Strategy (FBS) adds another strength to the proposed system by considering circumstances in which the target vessel does not comply with regulations. The FBS improves the overall system resilience by strengthening the reliability of collision avoidance decisions and ensuring safer navigation in the TSS.
COLREGs today primarily rely on RADAR ARPA water-stabilized data. Additionally, the proposed model concentrates on predetermined vessel status obtained from AIS data; it does not yet account for vessel dynamic features that are essential to real-world navigation, such as sudden movements and course changes, or human behavioural unpredictability. Despite being a useful source for determining vessel status in this study, AIS data has known limitations, such as signal loss and update delays that could impact decision-making in real-time applications. In order to enhance reliability in complex marine conditions, future system development should use all available information sensors for collision avoidance decisions. This study expands on the methodology and improves situational awareness and risk assessment precision by incorporating AIS Navigation status into the proposed DSS Architecture, which will help a navigator detect and recognize the vessel’s status earlier. By considering AIS navigational status which describes the status of the vessel in real-time, the proposed system ensures that vessel status is properly and timely classified in line with COLREG by defining specific input parameters, such as Under Way Using Engine (0), Not Under Command (2), Restricted Maneuverability (3), Constrained by her Draft (4), Engaged in Fishing (7), Under Way Sailing (8), and WIG (10) (ITU-R M. 1371). Due to operational limits and regulatory restrictions that forbid anchoring within the TSS, AIS statuses like At Anchor (1), Moored (5), and Aground (6) have been excluded from this study.
The categories considered in the architecture are as follows: Sailing vessel, Fishing vessel, Power-Driven vessel (PDV), Vessel constrained in their ability to maneuver (RAM), Not Under Command (NUC), or Constrained by Draft (CBD), Wing-in-Ground (WIG) Craft, and Seaplane. Each of the mentioned vessel types has specific rights and responsibilities under the COLREG, which defines the actions of OV in collision avoidance. In the architecture presented, OV is considered as PDV > 20 m, underway using an engine in the general direction of TSS while the target vessel crosses its bow from the port or starboard side. The proposed hierarchical decision-making model integrates vessel classification according to AIS navigational status, priority determination, and required action to determine whether the OV should stand on or give way in crossing situations.
Due to the poor results from the previous chapter, the proposed DSS Architecture will consider only vessels entering and crossing the TSS and the OV bow. To solve responsibilities concerning collision avoidance, the first thing to consider for OV is whether she is navigating near or in the TSS, and for other vessels, are they crossing the TSS? Once the OV enters or is navigating in the TSS, the navigator should be aware of their surroundings, considering the potential risk of collision, and factors as CPA, TCPA, Bow Crossing Range (BCR), and AIS information regarding vessel type and navigation status. Therefore, the DSS Architecture continuously monitors vessel movement and reassesses collision risk dynamically. If no immediate risk of collision is detected, routine monitoring of the surrounding traffic situation continues. However, once the risk of collision is established, the DSS Architecture must classify the type and navigation status of the approaching vessel to take a proper course of action under Rule 10. When collision risk arises, COLREG Rule 15 assigns stand-on and give-way responsibilities among two vessels in a crossing situation. Considering COLREG rules, a crossing situation is any situation that is not head-on or overtaking when the risk of collision is involved. A vessel with the other vessel on her starboard side is considered a give-way and should take action to avoid collision and not cross the other vessel’s bow. As a result, in
Figure 6, the proposed DSS Architecture suggests a give-way or stand-on solution in compliance with COLREGs Rule 16 (action by give-way vessel), Rule 17 (action by stand-on vessel), Rule 15 (crossing), Rule 18 (responsibilities between vessels), and Rule 7 (risk of collision) incorporated in Rule 10 (TSS).
Accurate determination of vessels’ length is another crucial challenge in collision avoidance, especially in crossing situations within the TSS. Vessels shorter than 20 m in length are subject to specific navigational rules, including the requirement to avoid impeding the safe passage of larger vessels following a traffic lane. Yet, practical difficulties in determining the vessel’s length can generate uncertainties in decision-making, increasing the risk of close-quarter situations or confusion of right-of-way obligations. Not only limited visibility and environmental conditions, but perspective distortion and distance effects may lead to incorrect vessel length assumptions.
In addition, the absence of electronic identification equipment on smaller boats aggravates this issue. Most large vessels are equipped with AIS, which provides precise information on the vessel’s length, while smaller ships or fishing boats do not have AIS transmitters. SOLAS regulation V/19 requires AIS to be fitted aboard all ships of 300 gross tonnage (GT) and upwards engaged on international voyages, cargo ships of 500 gross tonnage (GT) and upwards not engaged on international voyages, and all passenger ships irrespective of size (IMO, SOLAS, regulation V/19). In addition to the SOLAS requirement due to many fishing vessels participating in collisions, the European Union (EU) requires that all fishing vessels of more than 15 m in length be equipped with an operational AIS (EU directive 2009/17/EC). Unfortunately, numerous vessels do not have to be fitted with AIS; therefore, seafarers must rely on visual observation, which may lead to potential misjudgment in applying the correct COLREG rules.
In the TSS crossing scenario, the wrong assessment of a vessel’s length overall can result in improper designation of give-way or stand-on responsibilities. Overestimating the size of the crossing vessel length can lead to unwanted course or speed changes, thus causing inefficiencies in traffic flow and creating additional confusion among other vessels in the TSS. On the other hand, underestimating a vessel’s length may cause larger vessels to take the right-of-way incorrectly, potentially increasing the risk of collision. To reduce these difficulties, seafarers must apply conservative navigational practices, such as early detection and CPA, and TCPA analysis using RADAR ARPA. Greater AIS compliance by smaller vessels, use of advanced technology such as Infra-Red (IR) cameras, Light Detecting and Ranging (LIDAR), and increased training in visual identification techniques could further reduce misinterpretations, ultimately resulting in reducing human error and optimizing navigational safety in the TSS.
Furthermore, seaplanes and WIG craft integration into the maritime traffic system presents another specific challenge, especially in the TSS. According to COLREG rule 10, vessels navigating in a TSS are obliged to follow specific rules to minimize collision risk. As WIG craft and seaplanes operate at the interface of the sea and air, their categorization and right-of-way status become unclear and can lead to safety concerns in crossing situations. The primary challenge is the ability of navigators to anticipate and react to the unpredictable and rapid movements of WIG craft and seaplanes. The architecture of the proposed DSS highlights these difficulties, particularly in determining whether WIG craft should be treated as a conventional vessel or as a special category requiring adapted right-of-way rules. Furthermore, the solution provided by the proposed DSS Architecture is the use of AIS navigation status, WIG craft, and seaplanes in that way reports their intentions and status within TSS for such high-speed operations, avoiding potential misjudgment by navigators. Given the high speeds involved, it is essential to emphasize that the standard risk assessment tools, such as CPA and TCPA calculations, may not be adequate, requiring active and cautious maneuvering by OV.
WIG craft, which utilizes the ground effect for lift generation when flying very close to the water surface, is considered a vessel underway using the engine when operating on or above the water. However, doubts are created due to their considerably higher speeds and maneuverability than conventional vessels. Although WIG craft can be over 20 m long, when observed on RADAR, their operational characteristics might seem like a small high-speed vessel, causing potential misunderstanding by seafarers, which can lead to a wrong decision in executing collision avoidance maneuvers.
Similarly, seaplanes transitioning between airborne and waterborne states present another level of complexity. While Rule 10 does not mention seaplanes, COLREG Rule 18 instructs us that seaplanes in the water must avoid impeding the safe navigation of other vessels. Therefore, in the TSS, a seaplane preparing to land or take off might become a vessel at a particular moment and must comply with Rule 10. The dynamic shift of a seaplane makes it difficult for navigators to predict its movements and apply standard collision avoidance maneuvers.
5. Conclusions
The first significant aim revealed substantial gaps in navigators’ understanding of COLREG Rule 10, especially in complex situations involving bow crossing traffic in the TSS. To determine a statistically significant correlation between the respondents’ professional roles and their knowledge of Rule 10 (as determined by RUQ1–RUQ5), the chi-square test of independence has been applied for three categories (Master, OOW, and other). The chi-square statement assumes that more than half of the respondents know COLREG regulations well. According to the analysis for all three categories (OOW, Master, and others), the results are values of 18.19, 80.15, and 99.12, together with -values of 0.0001, 3.9384 × 10−18, and 2.8679 × 10−22. As a result, the test categorically rejects the chi-square statement with the conclusion that all experts are strongly associated with their misunderstanding of Rule 10. The suboptimal rate of correct responses in the COLREG international survey and excessive confidence of end-users indicate a requirement for the development of decision support tools.
In response, the second significant aim was to design a decision support system for the Bow Crossing Collision Avoidance Process to enhance navigational awareness and decision-making within the Traffic Separation Schemes. One of the decision-making challenges relies on the issue of vessel length estimation, the consideration of WIG craft and seaplanes, and the assessment of crossing situations regarding all targets. The inability to accurately estimate whether a vessel is less than 20 m in length can lead to misunderstanding the right-of-way rules and subsequently to unwanted collision situations. In addition, WIG craft and seaplanes present unique complexities, as their high speeds and dynamic change of state between waterborne and airborne states create confusion in traffic interactions.
Unlike previous research, the suggested solutions incorporate critical factors such as AIS navigation status and FBS that were not considered before, ensuring a more detailed approach to collision avoidance in specific surroundings. The framework of the proposed DSS Architecture is built upon an international survey involving 415 diverse specialized professionals, providing a valuable foundation for its development. Based on the survey results, the system has been tailored to solve real-world issues that OOWs encounter, such as standard errors brought on by a lack of knowledge and experience or simply due to fatigue. A key advantage of the proposed system is its ability to deliver navigational information promptly and in real-time, allowing the navigator to respond proactively to potential collision situations rather than reactively. Furthermore, incorporating an FBS ensures that, should the target vessel fail to comply with COLREGs, the system will notify the navigator, causing him to take prompt action to avoid a potential collision. This proactive and flexible strategy greatly improves maritime and environmental safety by reducing human error and enhancing decision-making in high-risk navigational situations.
Using AIS or another electronic identification system for WIG crafts, seaplanes, and vessels shorter than 20 m in length can significantly reduce misunderstanding, allowing navigators to make effective decisions. At this stage, the proposed DSS Architecture represents a critical regulatory logic module that can be incorporated into larger MASS Level 1 or INS navigational systems. Integrating the proposed decision support system in navigation equipment provides an intelligent and structured framework for assessing collision risks, classifying vessels, and making informed navigation decisions. Furthermore, automating the vessel classification and risk assessment system can minimize human error and ensure systematic compliance with international maritime regulations. With machine learning incorporated, subsequent DSS technologies will continually enhance real-time navigational safety and regulatory compliance in increasingly congested waterways. Integrating the proposed DSS Architecture into other devices such as INS, ECS/ECDIS, or a radar/ARPA significantly increases the effectiveness and awareness of navigators in the decision-making process. Although the suggested decision support framework has the potential to fill in the identified knowledge gaps, it has not yet been validated in real-world navigational scenarios. As a result, future research will concentrate on the complete validation and implementation of the suggested DSS Architecture, building on the results of this study, with a crucial task such as the application in a maritime simulator and testing using both autonomous and conventional vessels in a range of contact scenarios in the TSS. Furthermore, the incorporation of AI approaches, such as machine learning, real-time situational analysis, and enhanced algorithms, will further refine vessel classification and automate compliance with COLREG, contributing to the development of autonomous and safer marine navigation.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}