
Comparison of Innovative Strategies for the Coverage Problem: Path Planning, Search Optimization, and Applications in Underwater Robotics


Abstract
1. Introduction
Problem Definition
- TSP path on a point lattice—gold standard for minimum-length tours, but constrained to a fixed selection of way-points, only varying the order.
- MST–Hex and MST–Square—fast, scalable heuristics. The literature lacks a quantitative evaluation of their coverage loss.
- The OCP [3]—originally formulated for energy-aware path planning, and we adapt it here to address the coverage problem, supplying guidelines for the coverage terms and for warm-starting with TSP.
- Benchmark canonical planners. We deliver a head-to-head quantitative comparison of TSP, MST and an OCP baseline, using the bi-objective metric “uncovered area vs. path length”.
- Lightweight MST variant for on-board use. There are two key novelties:
- (a)
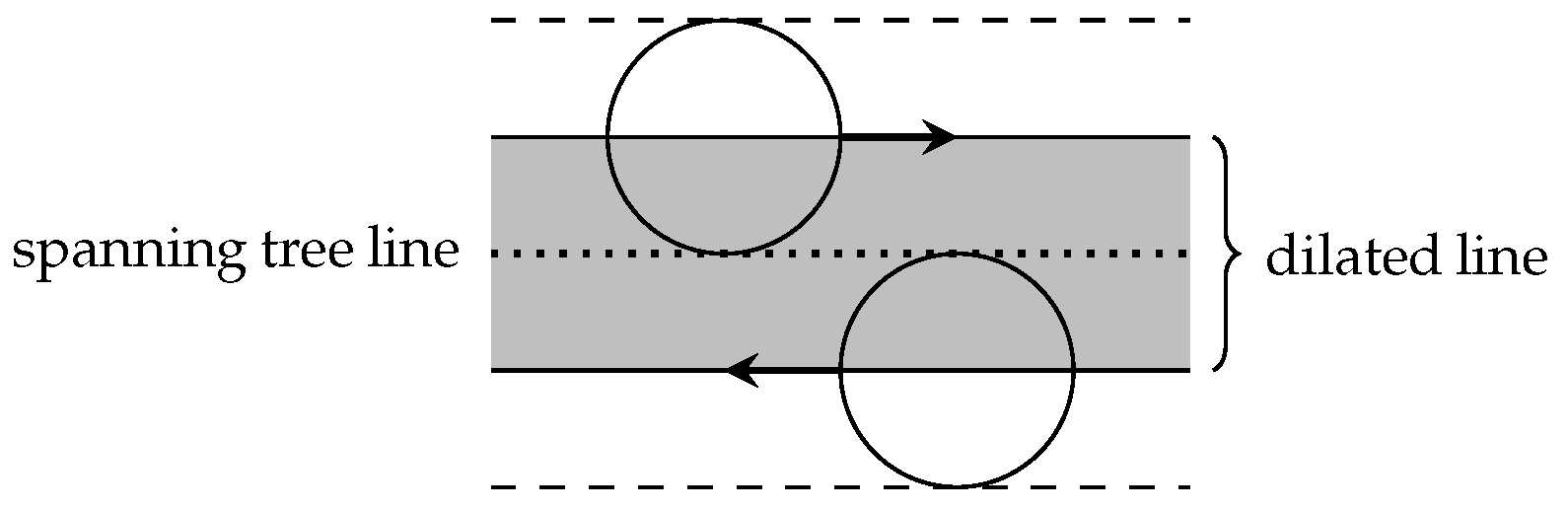
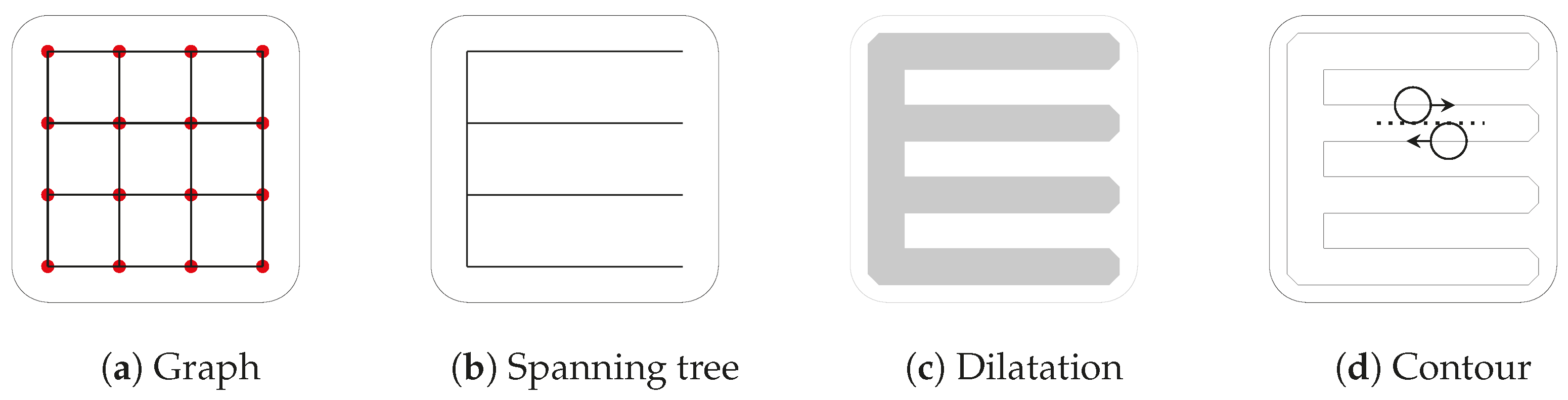
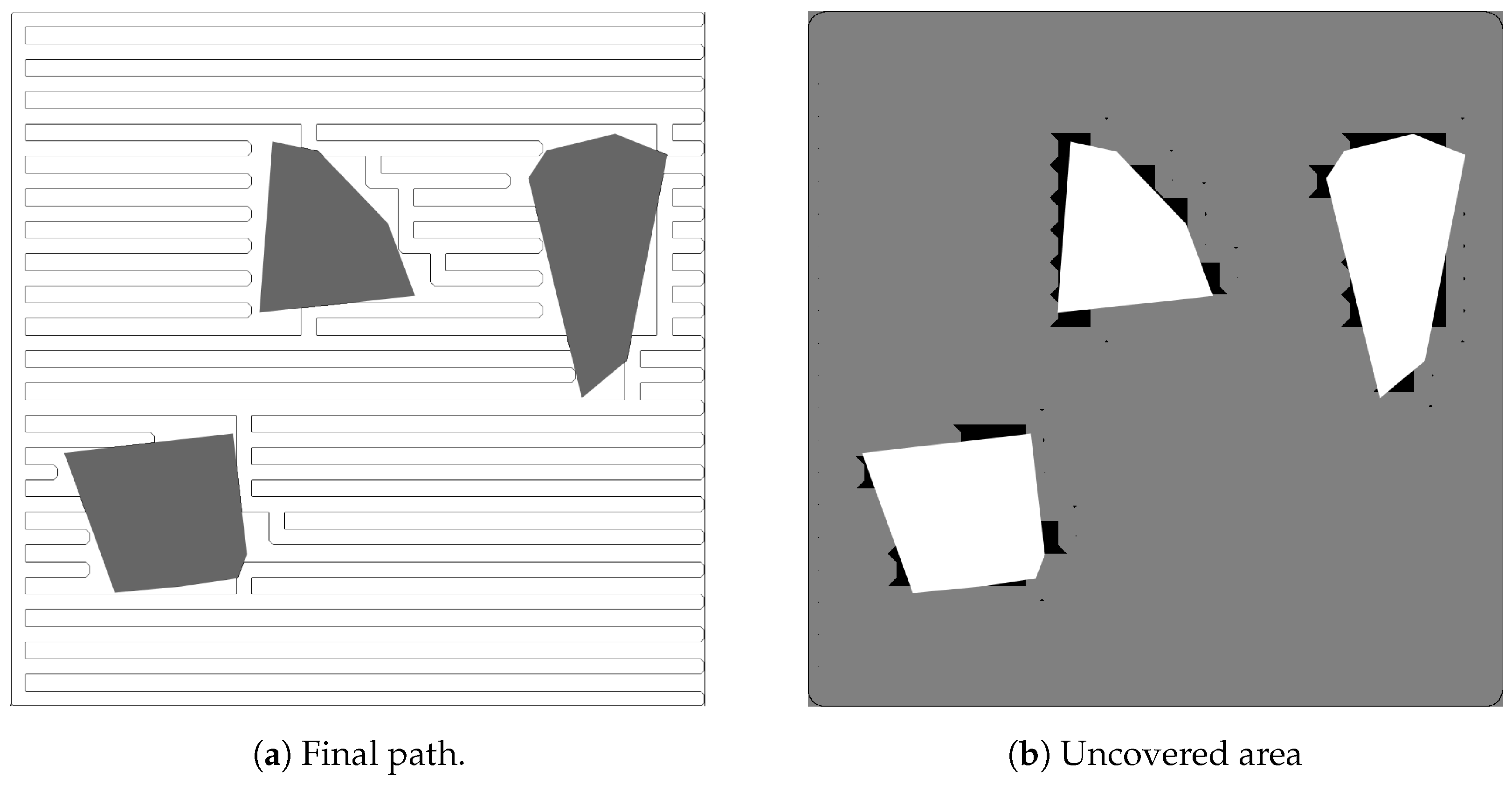
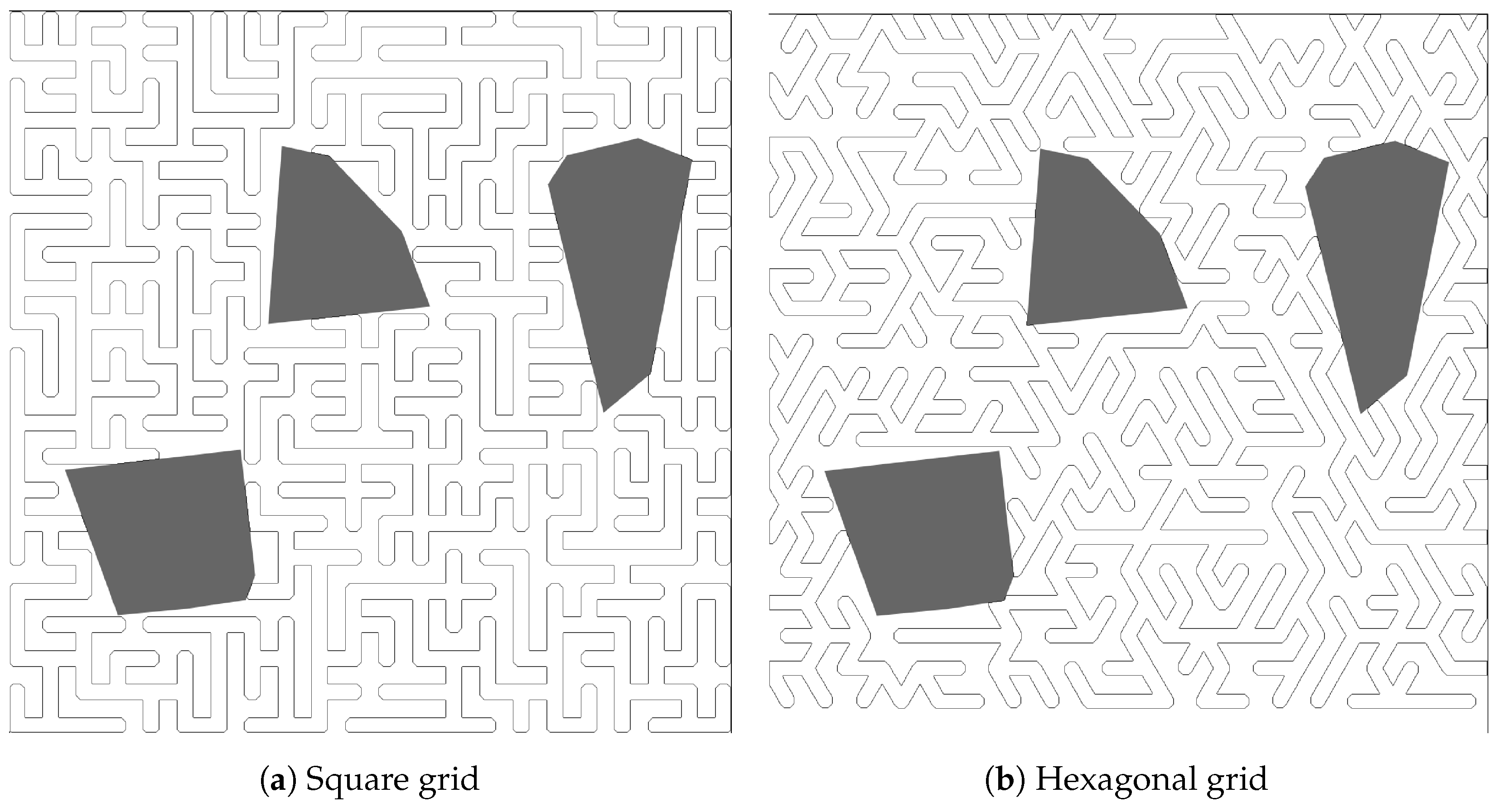
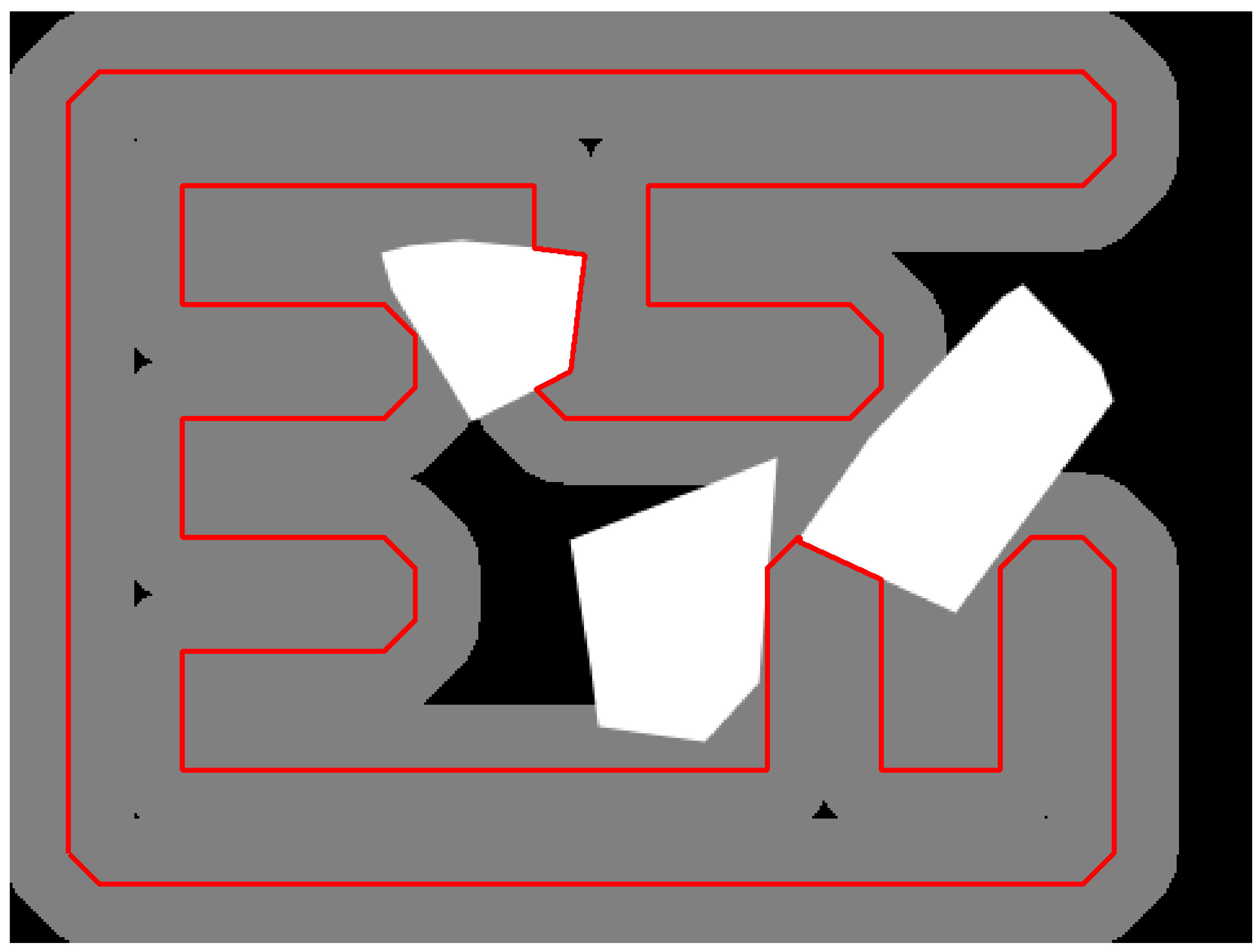
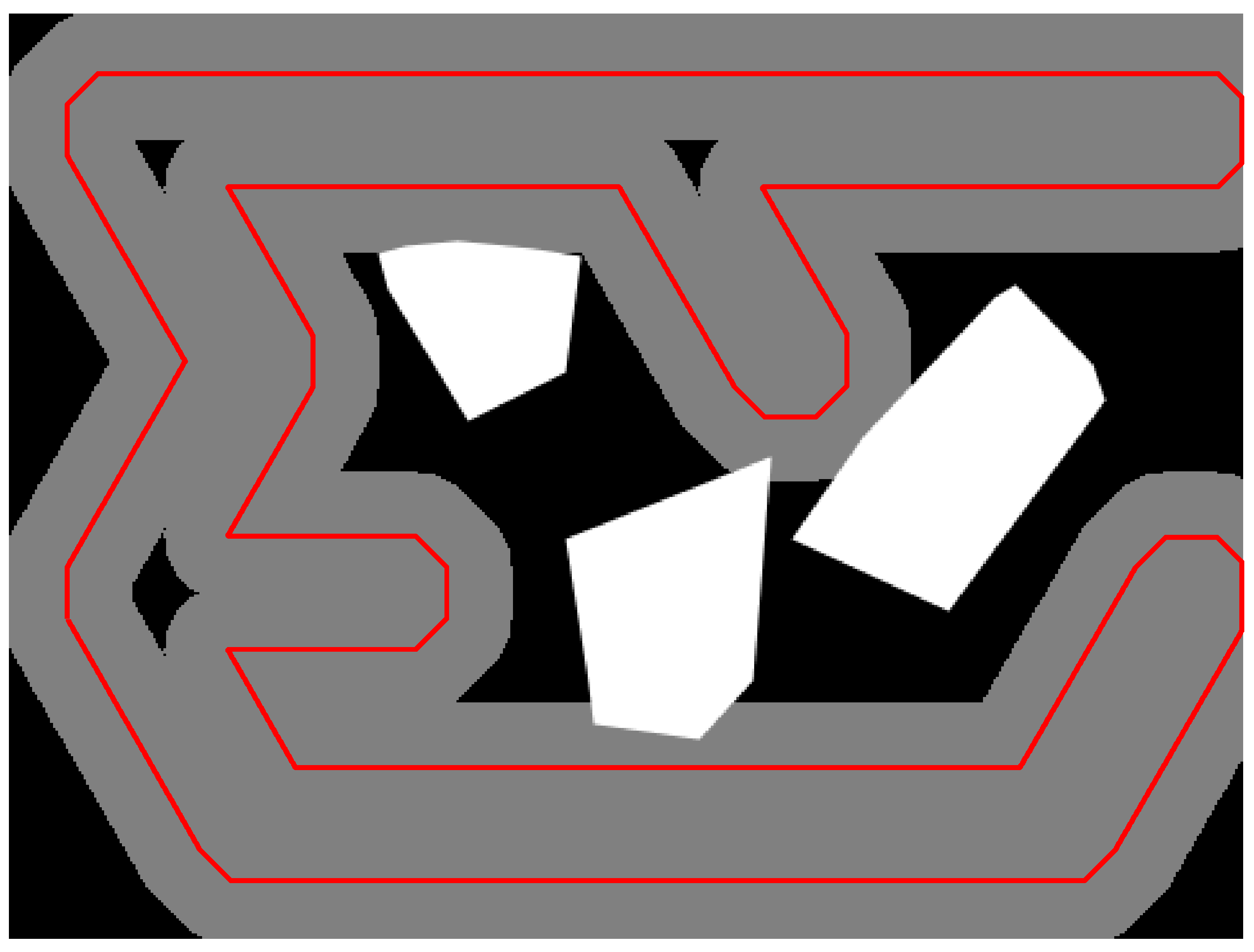
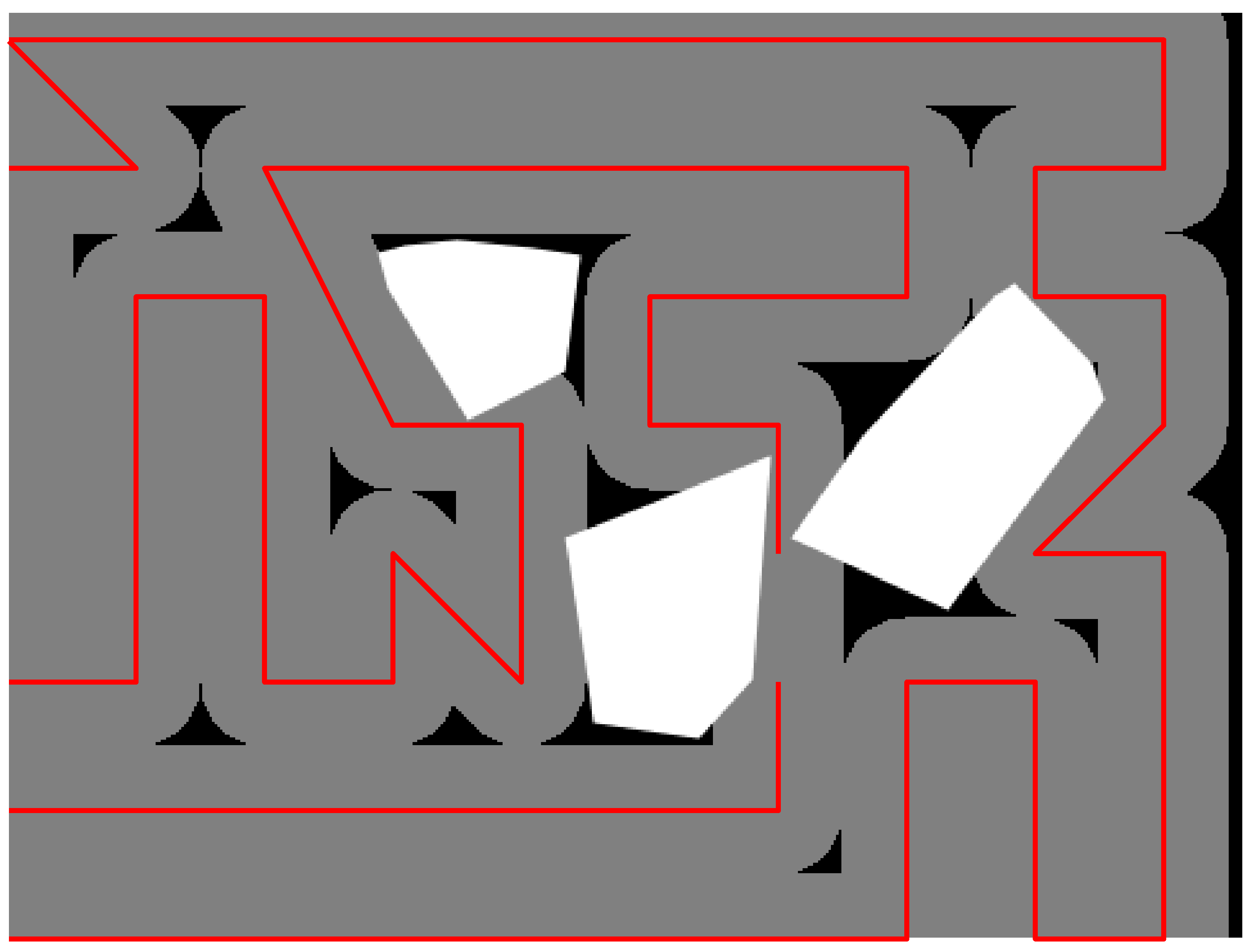
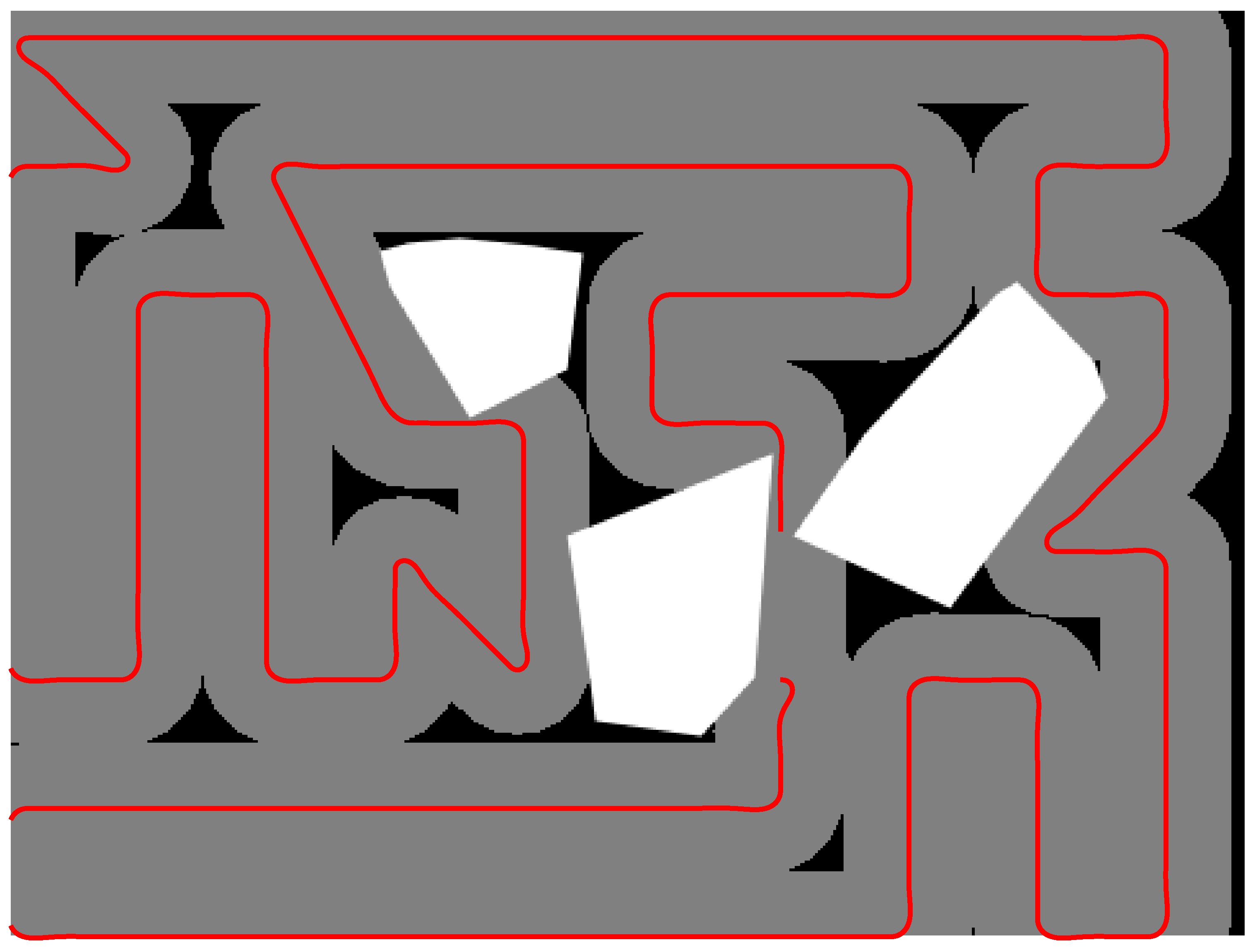
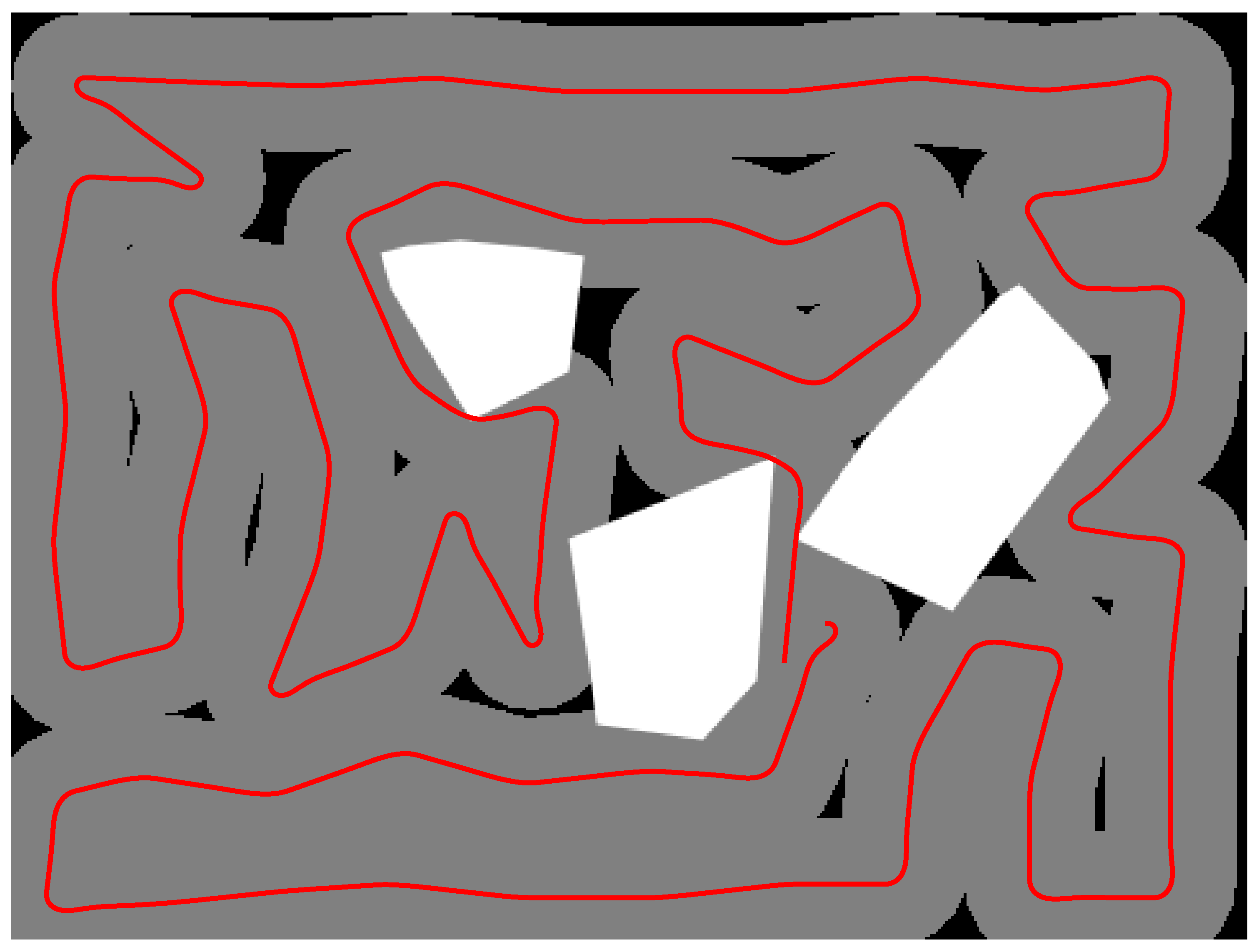
- Tree-to-contour. Dilate the MST and keep its outer boundary, obtaining a single closed sweep line.
- (b)
- Real-time runtime. Coarse grid, Kruskal algorithm, and two image operations complete in under 0.5 s on an Intel i7-12700H.
- Coverage-tuned OCP. We replace the original energy cost with a “missed-area + path-length” objective, warm-start the solver with the TSP solution, and enforce obstacle constraints directly in the collocation mesh.
2. Literature Review
2.1. Search Theory Problem
2.2. Coverage Problem
2.3. Minimum Spanning Tree
- The surface can be divided into N areas of equal surface a priori, but this does not guarantee optimality, since some areas can be much more difficult to explore;
- The problem can be posed and solved for a single robot; then, the trajectory will be divided into N trajectories of equal length, which does not allow for recovering the robots at the place from where they started;
- Finally, the calculated minimum spanning tree can be divided into a forest of trees (by removing some branches) of the same size, which then allows them to recover N closed trajectories. If N = 2, both robots will be released and recovered at the same point.
2.4. Traveling Salesman Problem
2.5. Optimal Control Problem
- A mathematical model of the system to be controlled,
- A cost function,
- A specification of all boundary conditions on states and constraints to be satisfied by states and controls, and
- A statement of what variables are free.
3. Methodology
3.1. Optimal Control Problem (OCP)
3.1.1. Detection Model Implementation
3.1.2. Optimal Control Problem Formulation
3.2. Minimum Spanning Tree
- The presence of a third dimension;
- Winds and sea currents fluctuating over time;
- The difficulty of navigating certain robots (sailboats, gliders, etc.);
- The risk of losing a robot (risks of collision, breakdowns, etc.);
- The specificity of sensors in a marine environment;
- The difficulty of communicating with fixed stations or between robots when they are underwater.
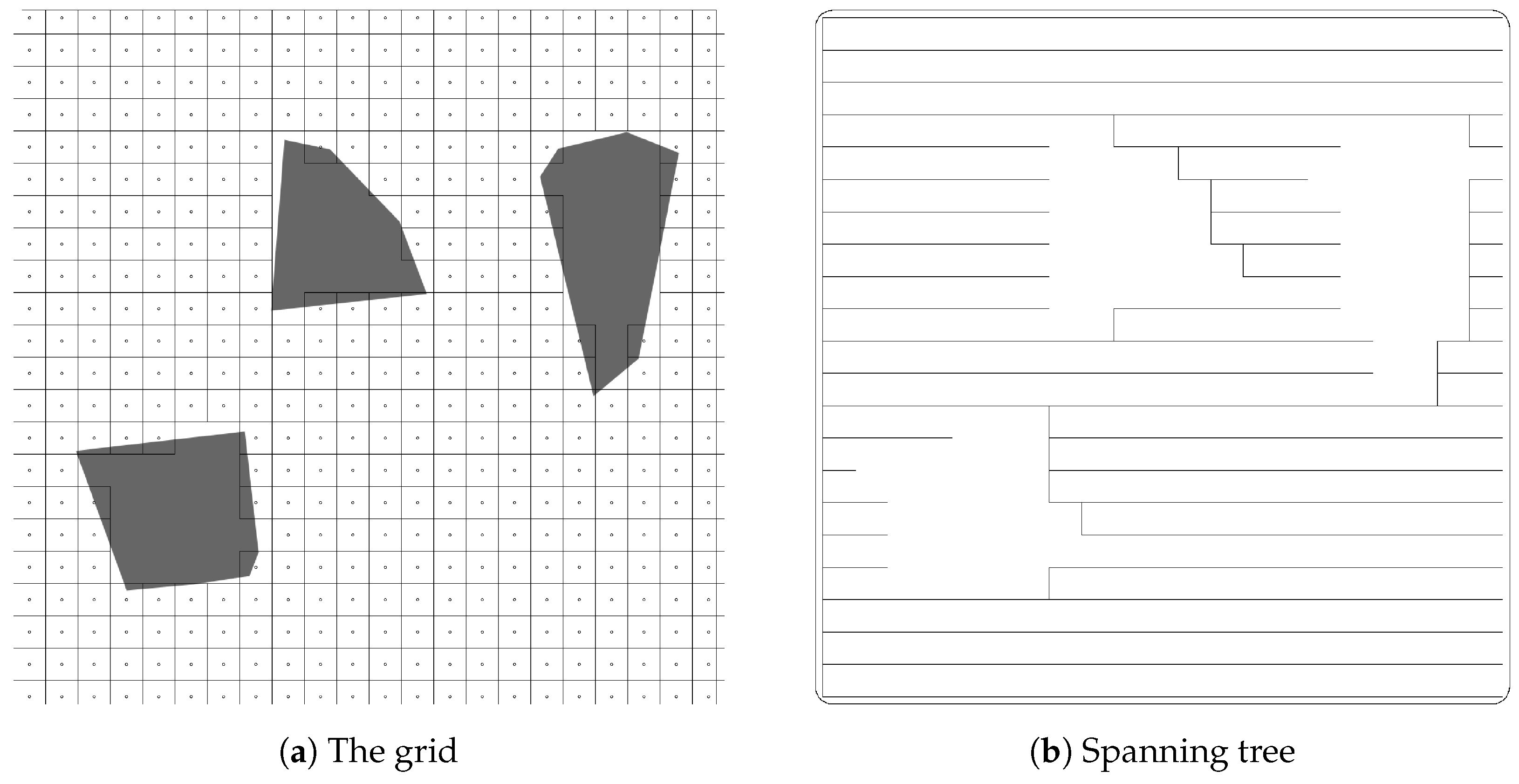
- The extraction of a minimum spanning tree is performed using Kruskal’s algorithm, which is a greedy algorithm that can be proven to be optimal. It proceeds by sorting the edges in ascending order and iteratively adding them to the tree, ensuring no cycles are formed. Since the number of vertices is proportional to the area to be explored, the number of edges is proportional to the square of this area.
- The dilation operation is equivalent to a convolution with a disk of radius r. Assuming r is small relative to the exploration area, the cost of this operation is linear with respect to the surface area.
- Contour extraction can also be formulated as a convolution, for instance, using the Sobel edge detection method, which remains a linear-time operation in terms of surface area. However, to obtain the final trajectory, it is more practical to perform contour following, which can also be executed in linear time.
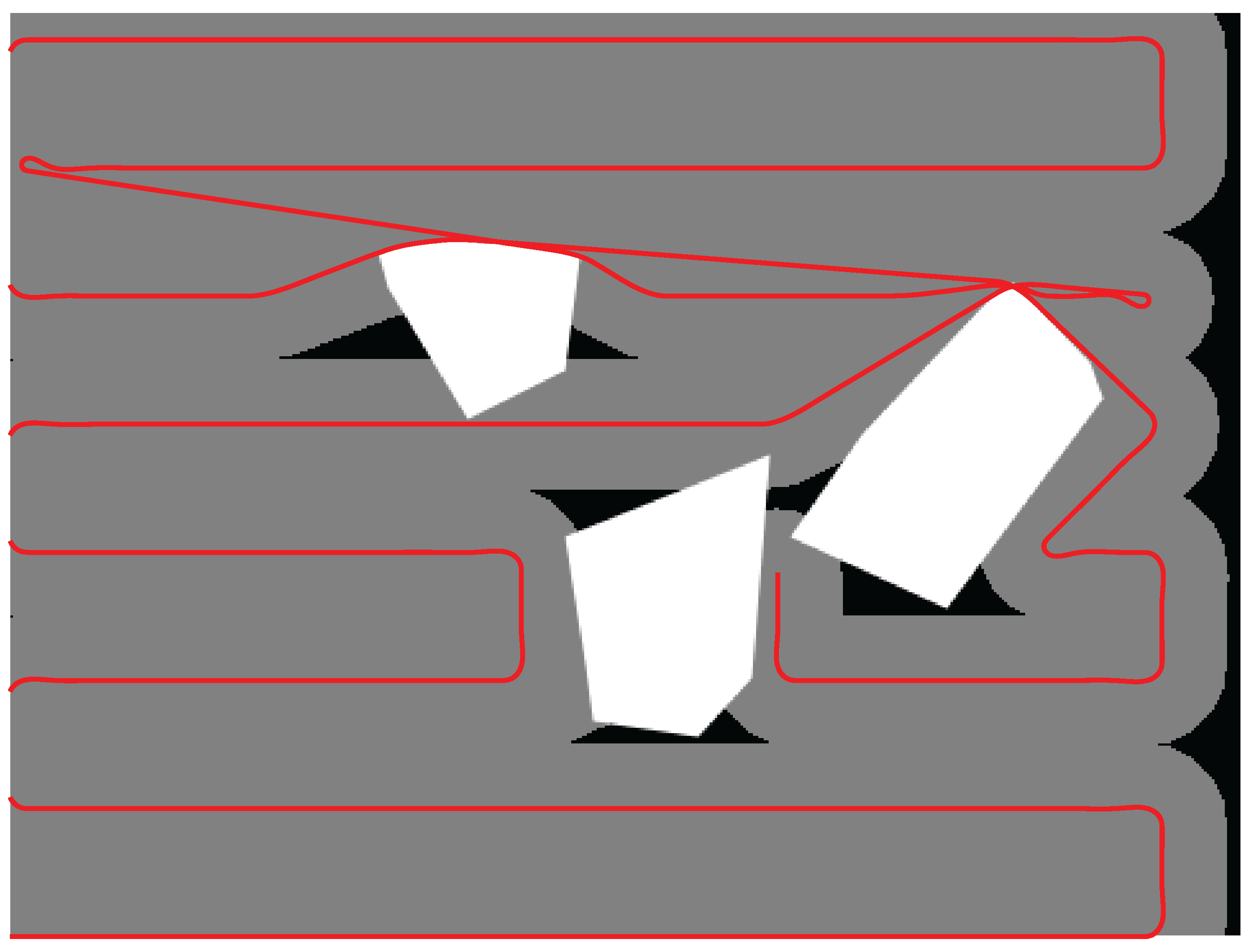
- The use of a regular grid ensures minimal-length trajectories in a rectangular domain. However, it may be beneficial to introduce additional points in the discretization to refine exploration in specific areas or to navigate through narrow passages.
3.3. Traveling Salesman Problem
3.3.1. Problem Statement
3.3.2. Objective Function
3.3.3. Constraints
3.3.4. Implementation Considerations
4. Numerical Results
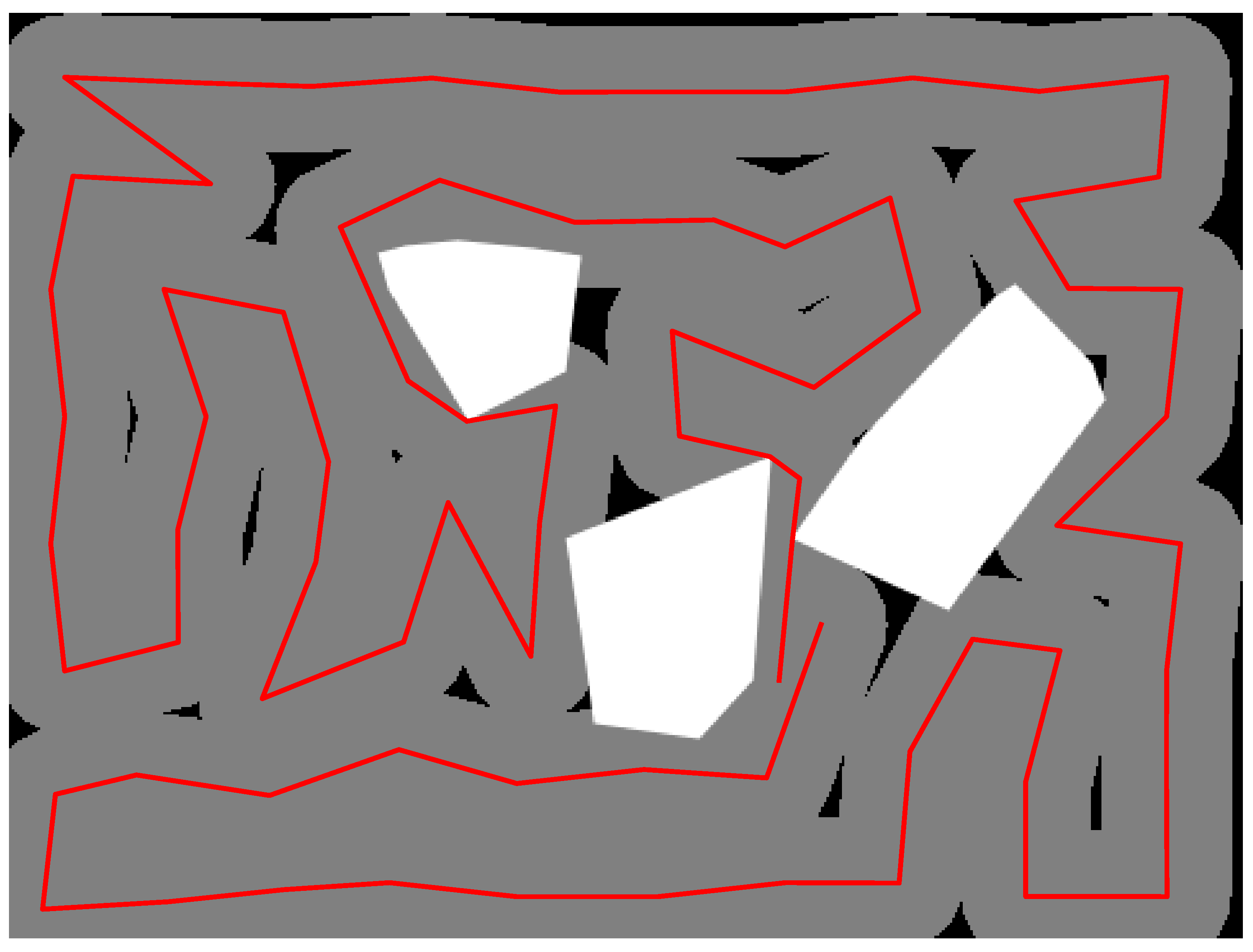
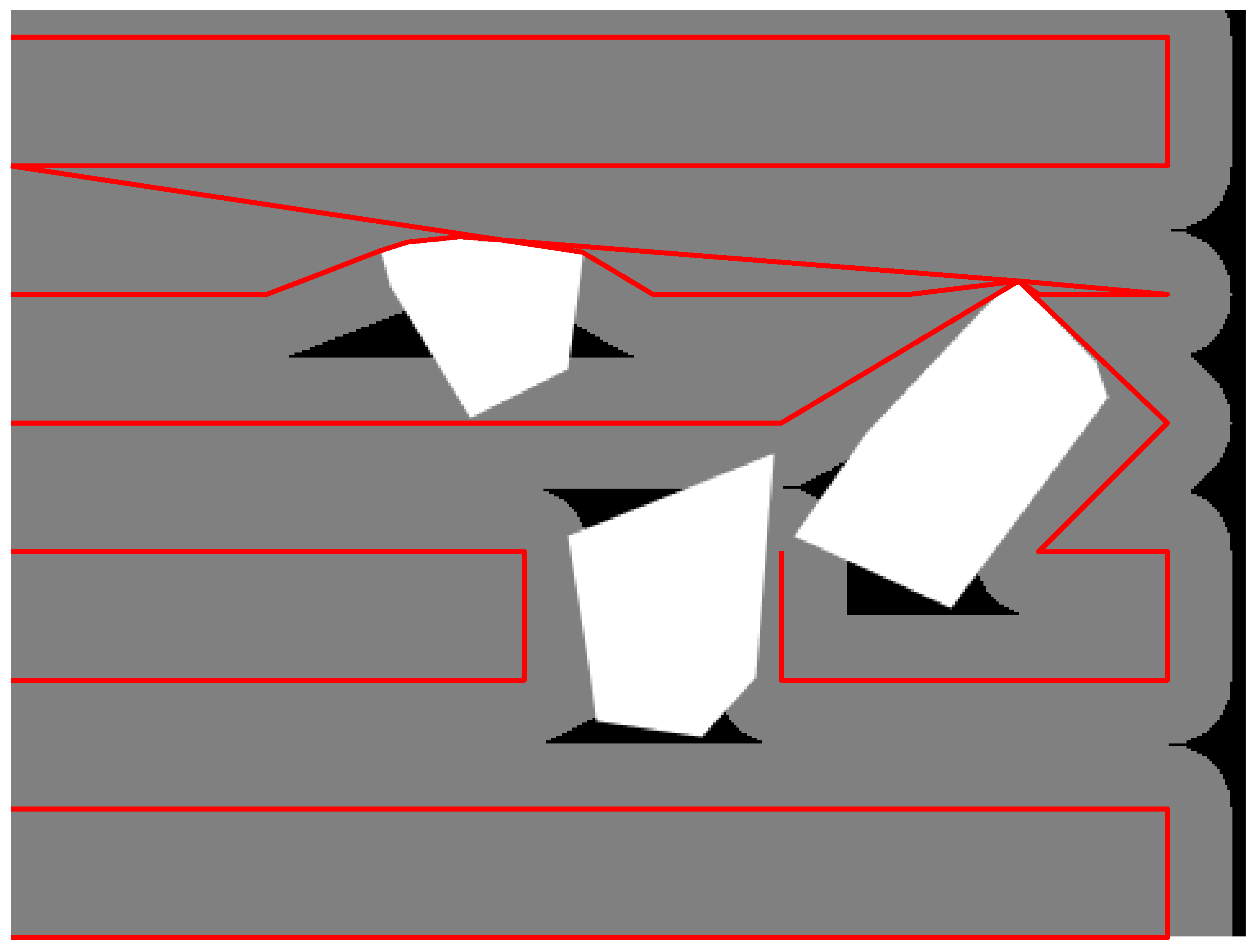
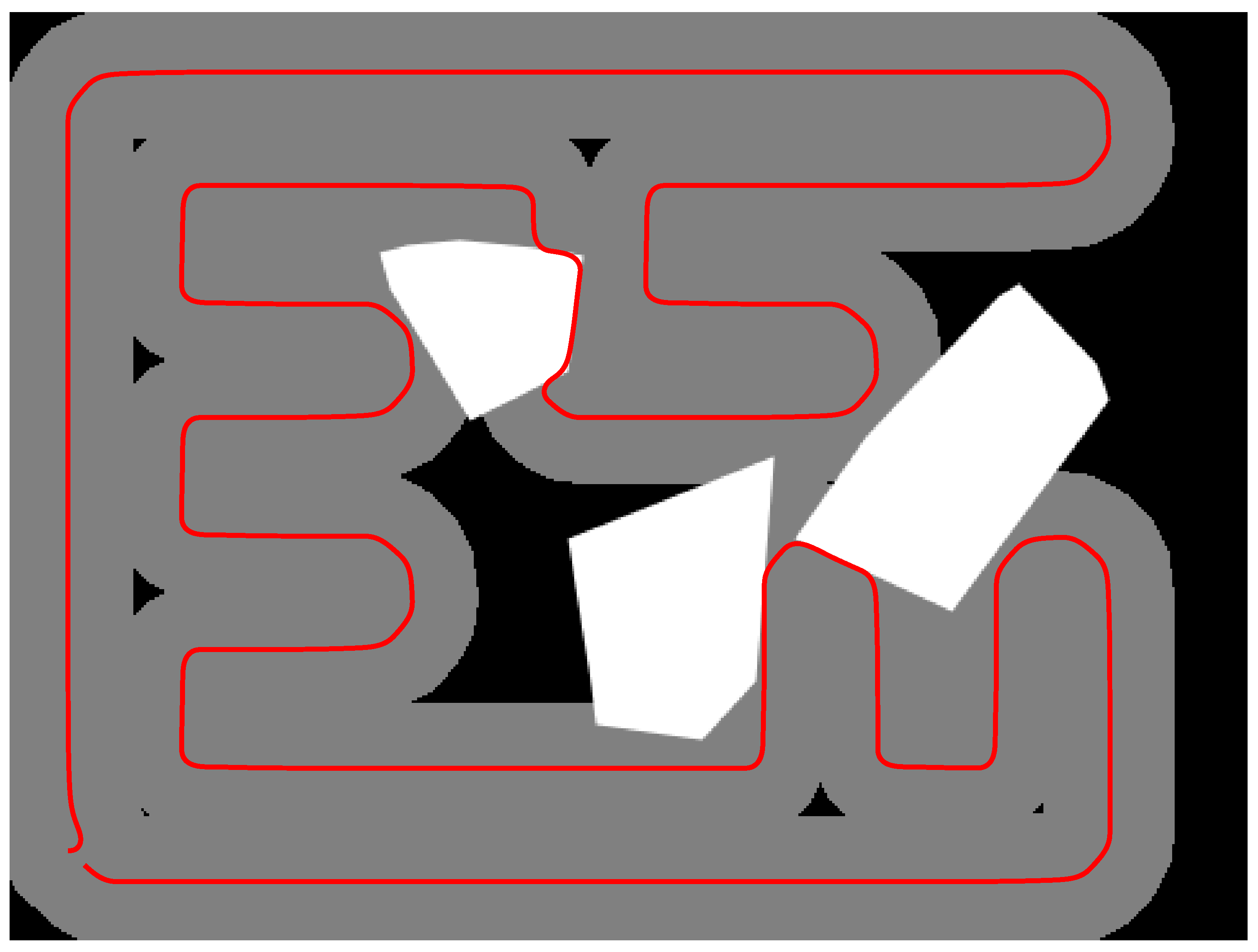
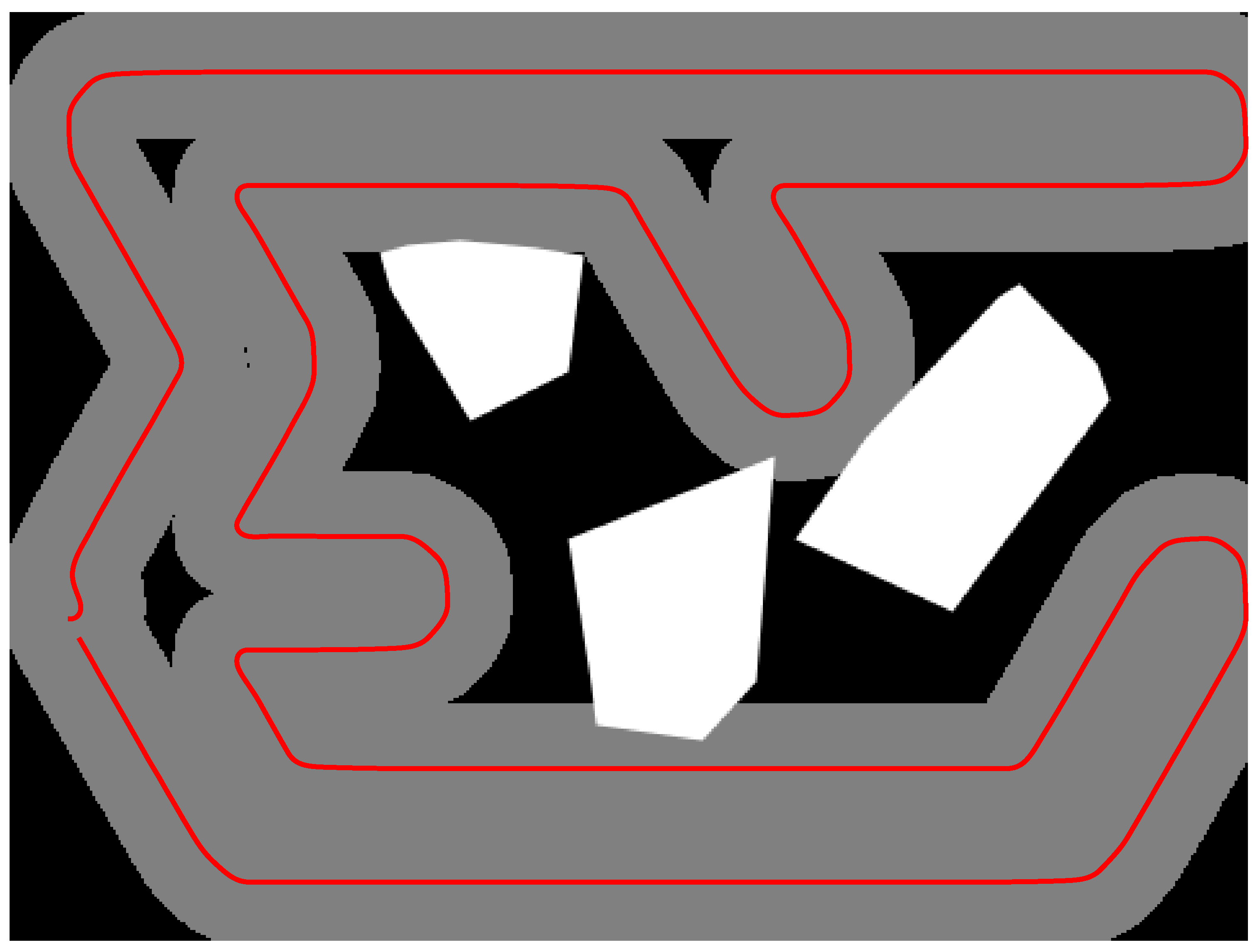
4.1. Single-Sample Illustration
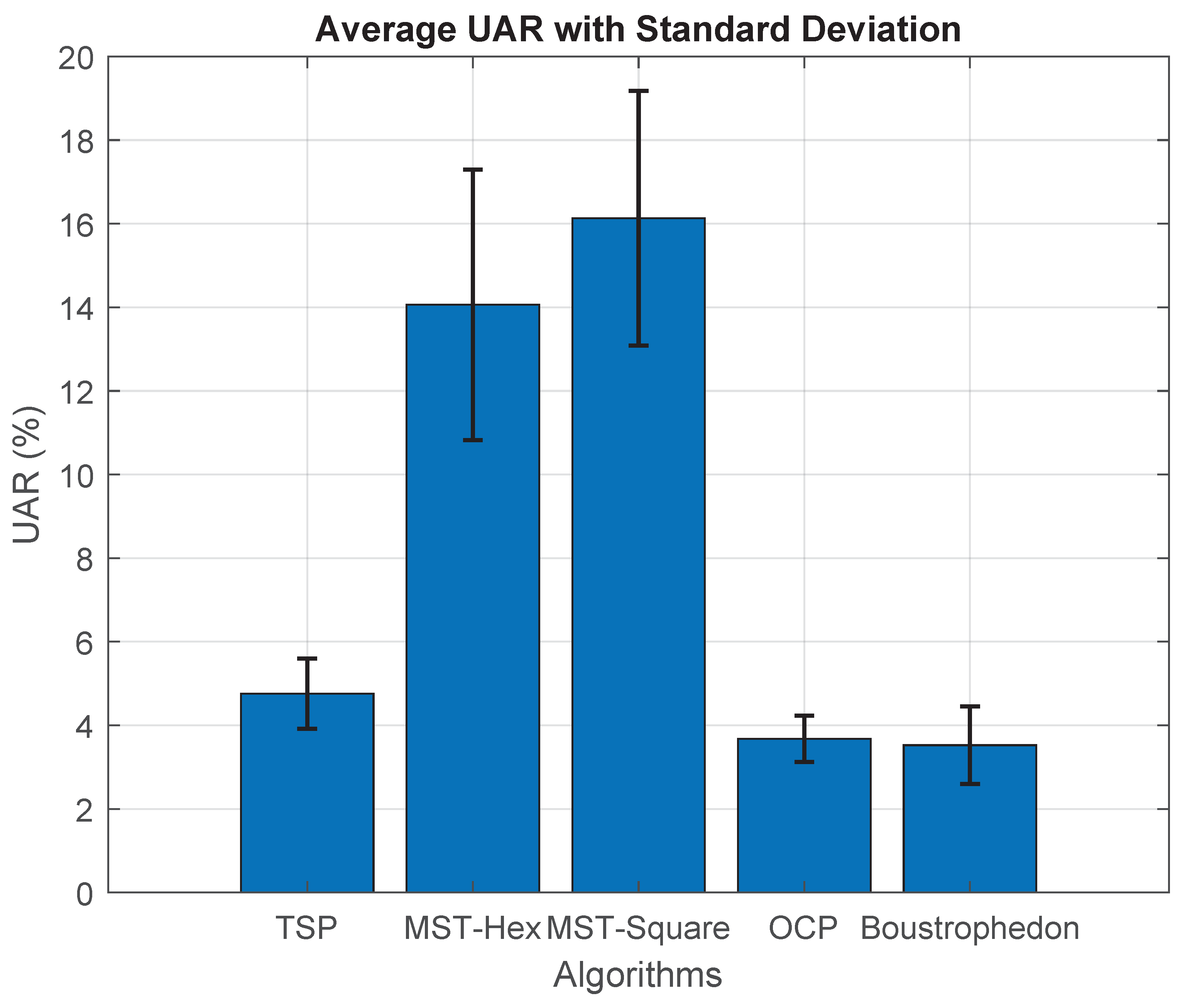
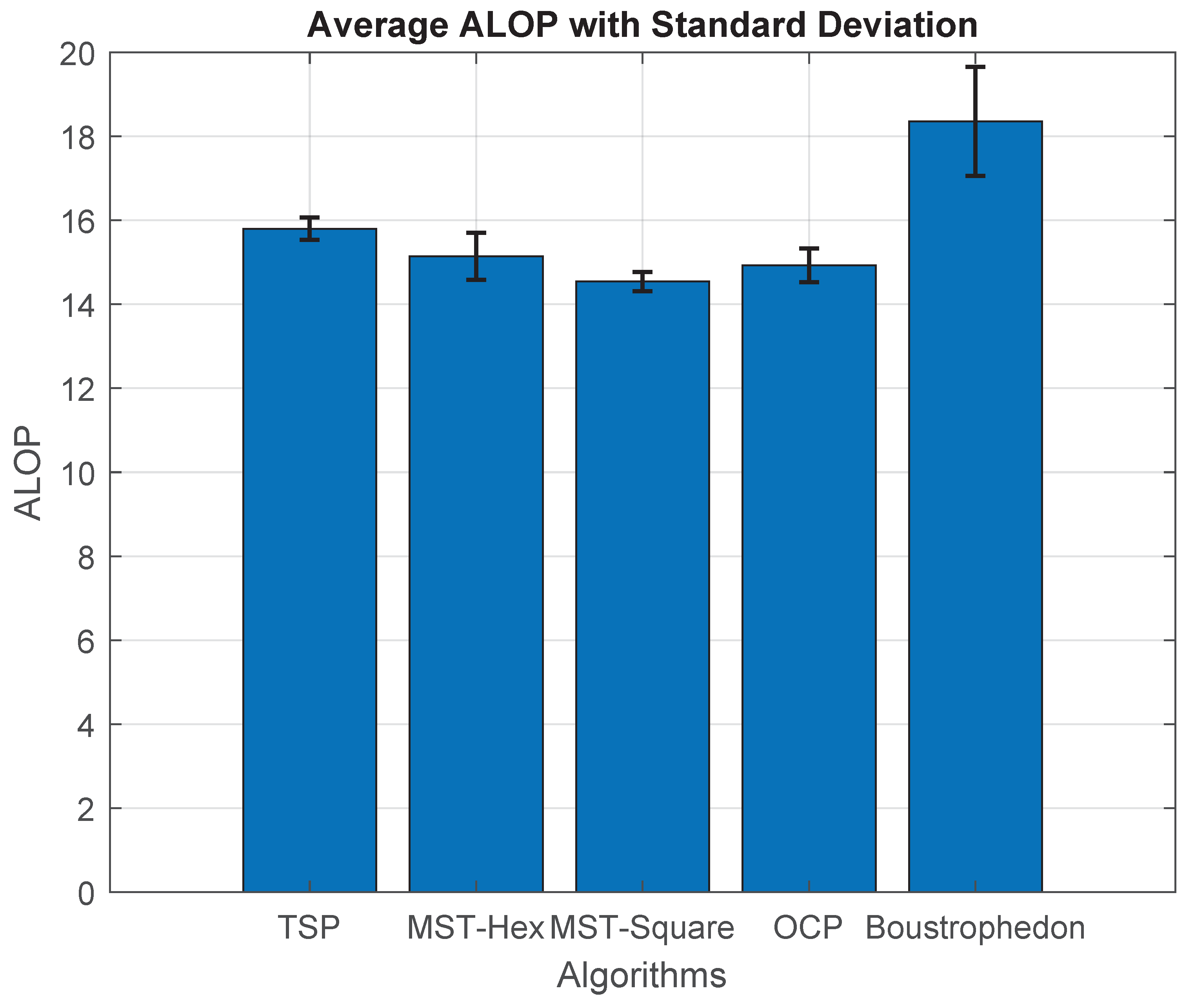
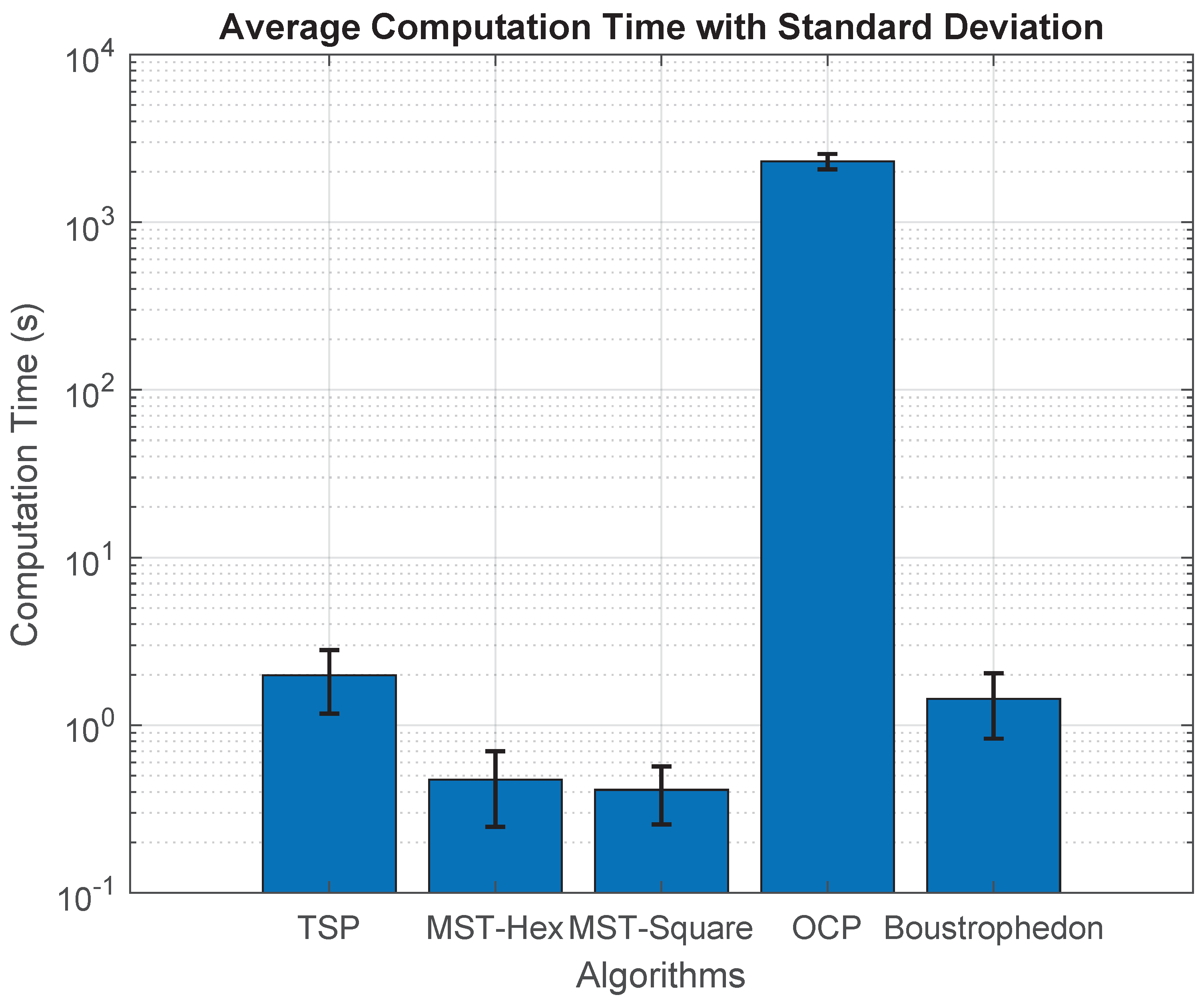
4.2. Aggregate Performance over 10 Samples
4.3. Discussion
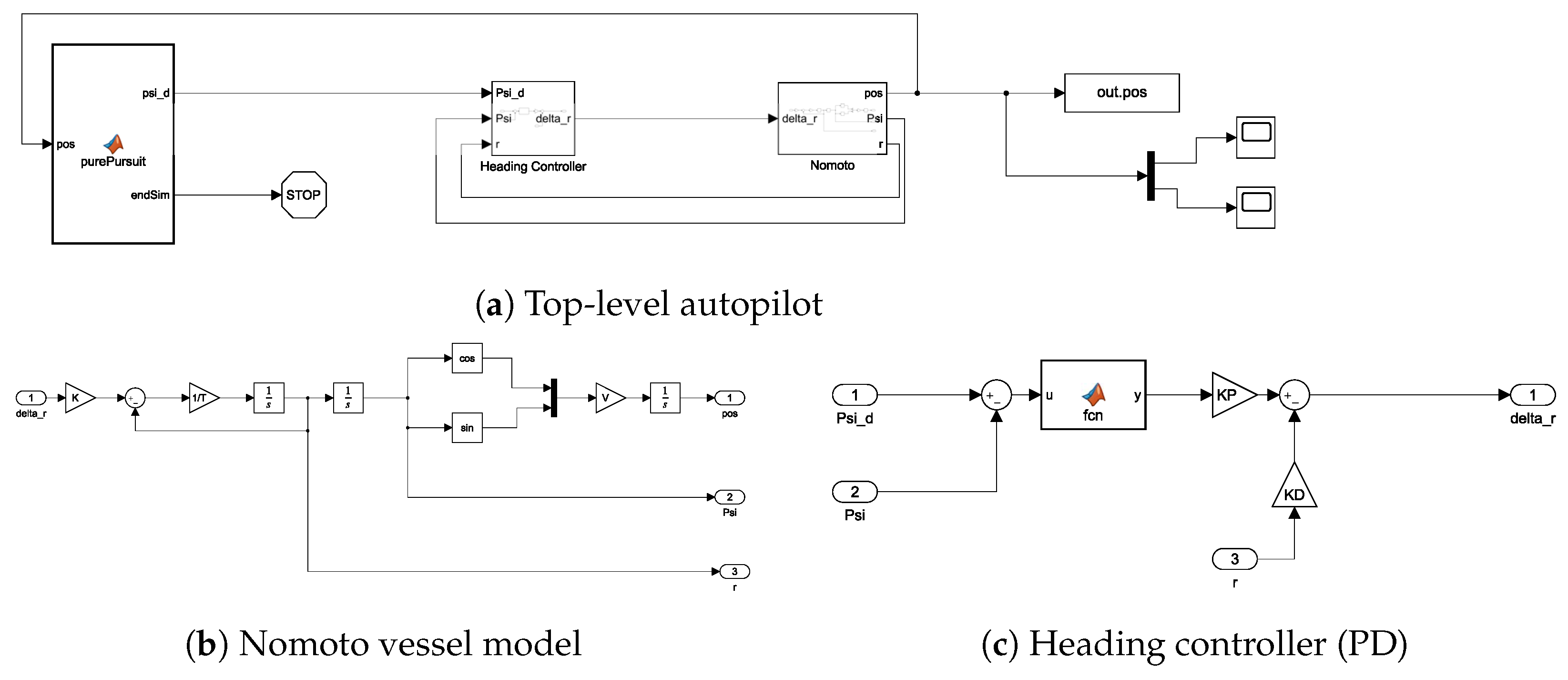
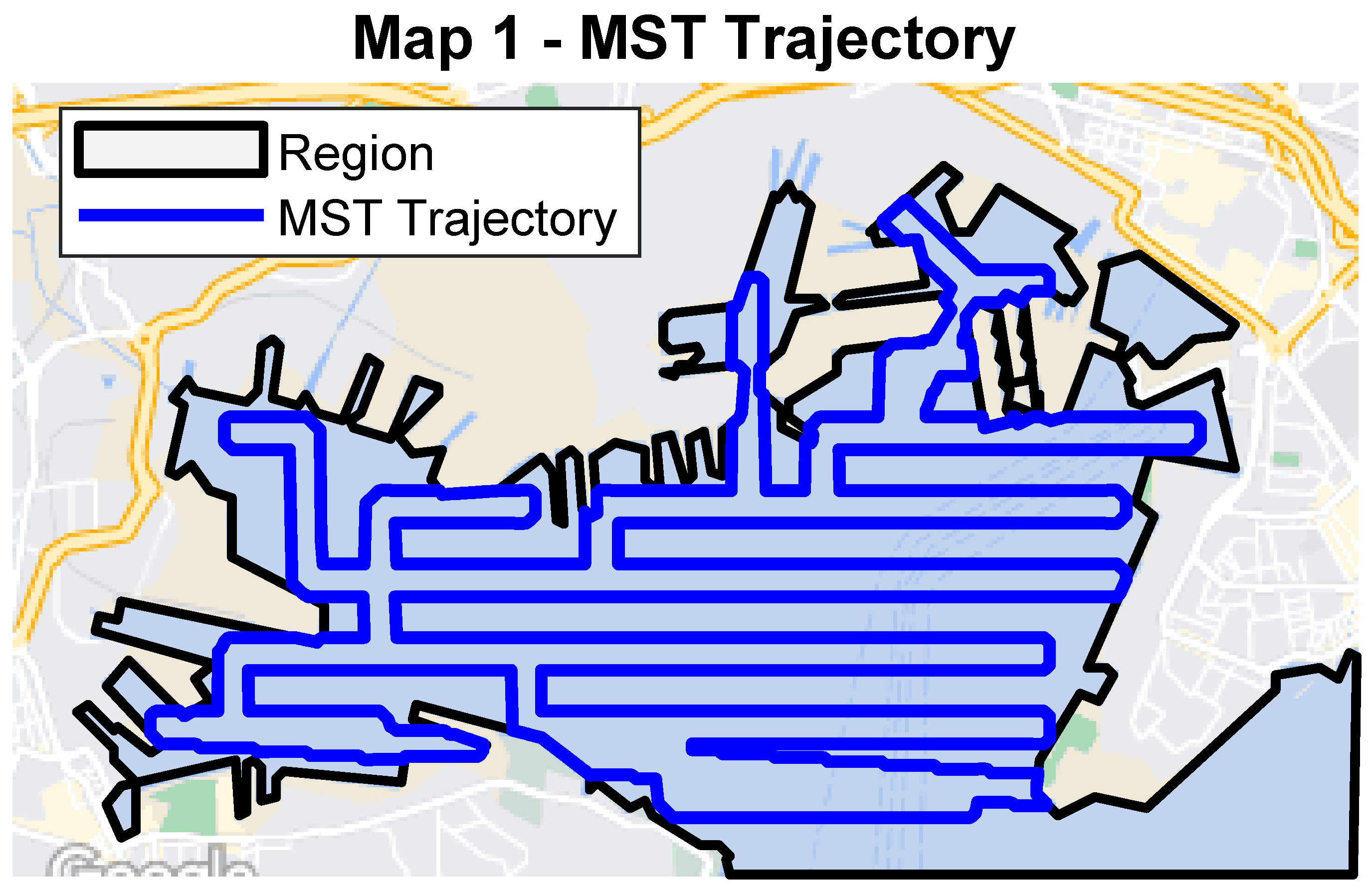
4.4. Marine Application
- Zero stream current.
- Vehicle traveling at a constant speed.
- The problem is considered to be a simple planar motion at the sea surface (i.e., pitch, roll, and heave motions are zero).
- Yaw rate can be directly controlled. (The Nomoto time constant is considered to be very large)
- (a)
- Segment selection. Starting from the last active index k, advance to the first segment whose end-point is still at least ahead of .
- (b)
- Orthogonal projection. With and , compute
- (c)
- Carrot point and desired heading. The look-ahead (“carrot”) point is . Bearing to that point defines the desired headingwhere is the four-quadrant arctangent. The algorithm terminates when or , in which case simply points to the final way-point. In this paper, we consider the value
4.5. Outer Polygon Extraction from Map Images
5. Conclusions
Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koopman, B.O. The Theory of Search. II. Target Detection. Oper. Res. 1956, 4, 503–531. [Google Scholar] [CrossRef]
- Chudnovsky, D.V.; Chudnovsky, G.V. Search Theory: Some Recent Developments; CRC Press: Boca Raton, FL, USA, 2023. [Google Scholar]
- Kragelund, S.; Walton, C.; Kaminer, I.; Dobrokhodov, V. Generalized Optimal Control for Autonomous Mine Countermeasures Missions. IEEE J. Ocean. Eng. 2021, 46, 466–496. [Google Scholar] [CrossRef]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics: A survey. Auton. Robot. 2011, 31, 299–316. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Masakuna, J.F.; Utete, S.W.; Kroon, S. A Coordinated Search Strategy for Solitary Robots. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; IEEE: New York, NY, USA, 2019; pp. 433–434. [Google Scholar]
- Ismail, Z.; Hamami, M. Systematic literature review of swarm robotics strategies applied to target search problem with environment constraints. Appl. Sci. 2021, 11, 2383. [Google Scholar] [CrossRef]
- Yang, J.; Wang, X.; Bauer, P. Extended pso based collaborative searching for robotic swarms with practical constraints. IEEE Access 2019, 7, 76328–76341. [Google Scholar] [CrossRef]
- Luo, Y.; Ye, G.; Wang, Y.; Xie, L.; Wang, X.; Zhang, S.; Yan, X. Toward target search approach of swarm robotics in limited communication environment based on robot chains with elimination mechanism. Int. J. Adv. Robot. Syst. 2020, 17, 172988142091995. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, A.; He, X.; Bian, X. Multi-target coordinated search algorithm for swarm robotics considering practical constraints. Front. Neurorobot. 2021, 15, 753052. [Google Scholar] [CrossRef] [PubMed]
- Batalin, M.; Sukhatme, G. Coverage, exploration and deployment by a mobile robot and communication network. Telecommun. Syst. 2004, 26, 181–196. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Le, A.; Veerajagadheswar, P.; Sivanantham, V.; Mohan, R. Modified a-star algorithm for efficient coverage path planning in Tetris inspired self-reconfigurable robot with integrated laser sensor. Sensors 2018, 18, 2585. [Google Scholar] [CrossRef] [PubMed]
- Strimel, G.P.; Veloso, M.M. Coverage planning with finite resources. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; IEEE: New York, NY, USA, 2014; pp. 2950–2956. [Google Scholar]
- Khan, A.; Noreen, I.; Ryu, H.; Doh, N.L.; Habib, Z. Online complete coverage path planning using two-way proximity search. Intell. Serv. Robot. 2017, 10, 229–240. [Google Scholar] [CrossRef]
- Huang, K.C.; Lian, F.L.; Chen, C.T.; Wu, C.H.; Chen, C.C. A novel solution with rapid Voronoi-based coverage path planning in irregular environment for robotic mowing systems. Int. J. Intell. Robot. Appl. 2021, 5, 558–575. [Google Scholar] [CrossRef]
- Höffmann, M.; Patel, S.; Büskens, C. Optimal coverage path planning for agricultural vehicles with curvature constraints. Agriculture 2023, 13, 2112. [Google Scholar] [CrossRef]
- Jayalakshmi, K.; Nair, V.G.; Sathish, D.; Guruprasad, K. Adaptive Spanning Tree based Coverage Path Planning for Autonomous Mobile Robots in Dynamic Environments. IEEE Access 2025, 13, 102931–102950. [Google Scholar] [CrossRef]
- Hung, N.T.; Rego, F.; Crasta, N.; Pascoal, A.M. Input-constrained path following for autonomous marine vehicles with a global region of attraction. IFAC-PapersOnLine 2018, 51, 348–353. [Google Scholar] [CrossRef]
- Gkesoulis, A.K.; Georgakis, P.; Karras, G.C.; Bechlioulis, C.P. Autonomous Sea Floor Coverage with Constrained Input Autonomous Underwater Vehicles: Integrated Path Planning and Control. Sensors 2025, 25, 1023. [Google Scholar] [CrossRef] [PubMed]
- Rego, F.; Hung, N.; Pascoal, A. Cooperative path-following of autonomous marine vehicles: Theory and experiments. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Graham, R.; Hell, P. On the History of the Minimum Spanning Tree Problem. Ann. Hist. Comput. 1985, 7, 43–57. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. Spanning-tree based coverage of continuous areas by a mobile robot. Ann. Math. Artif. Intell. 2001, 31, 77–98. [Google Scholar] [CrossRef]
- Hazon, N.; Kaminka, G.A. Redundancy, efficiency and robustness in multi-robot coverage. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; IEEE: New York, NY, USA, 2005; pp. 735–741. [Google Scholar]
- Merci, A.; Anthierens, C.; Thirion-Moreau, N.; Le Page, Y. Management of a fleet of autonomous underwater gliders for area coverage: From simulation to real-life experimentation. Robot. Auton. Syst. 2025, 183, 104825. [Google Scholar] [CrossRef]
- Li, Y.; Gu, N.; Jia, J.; Peng, Z.; Wang, D. Simulated Annealing-Based Optimization for the Coverage Path Planning of Multiple Unmanned Surface Vehicles in ECDIS. In Proceedings of the 2024 14th International Conference on Information Science and Technology (ICIST), Chengdu, China, 6–9 December 2024; IEEE: New York, NY, USA, 2024; pp. 188–193. [Google Scholar]
- Laporte, G. The traveling salesman problem: An overview of exact and approximate algorithms. Eur. J. Oper. Res. 1992, 59, 231–247. [Google Scholar] [CrossRef]
- Walton, C.L.; Gong, Q.; Kaminer, I.; Royset, J.O. Optimal Motion Planning for Searching for Uncertain Targets. Ifac Proc. Vol. 2014, 47, 8977–8982. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Lin, S. Computer solutions of the traveling salesman problem. Bell Syst. Tech. J. 1965, 44, 2245–2269. [Google Scholar] [CrossRef]
- Rego, F.F.C. Cover_Planning: Coverage Planning Algorithms for Underwater Robotics. 2025. Available online: https://github.com/ffcrego87/cover_planning (accessed on 17 June 2025).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Avg. UAR (%) | Avg. ALOP | Avg. Time (s) |
|---|---|---|---|
| TSP | 4.76 | 15.80 | |
| MST-hex | 14.06 | 15.14 | |
| MST-square | 16.13 | 14.54 | |
| OCP | 3.67 | 14.92 | 2306 |
| Boustrophedon | 3.52 | 18.35 |
| Design Parameter | Value |
|---|---|
| Nomoto Gain Constant, K | 0.5 1/s |
| Nomoto Time Constant, T | 5.0 s |
| Velocity, V | 2.5 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ibrahim, A.; Rego, F.F.C.; Busvelle, É. Comparison of Innovative Strategies for the Coverage Problem: Path Planning, Search Optimization, and Applications in Underwater Robotics. J. Mar. Sci. Eng. 2025, 13, 1369. https://doi.org/10.3390/jmse13071369
Ibrahim A, Rego FFC, Busvelle É. Comparison of Innovative Strategies for the Coverage Problem: Path Planning, Search Optimization, and Applications in Underwater Robotics. Journal of Marine Science and Engineering. 2025; 13(7):1369. https://doi.org/10.3390/jmse13071369
Chicago/Turabian StyleIbrahim, Ahmed, Francisco F. C. Rego, and Éric Busvelle. 2025. "Comparison of Innovative Strategies for the Coverage Problem: Path Planning, Search Optimization, and Applications in Underwater Robotics" Journal of Marine Science and Engineering 13, no. 7: 1369. https://doi.org/10.3390/jmse13071369
APA StyleIbrahim, A., Rego, F. F. C., & Busvelle, É. (2025). Comparison of Innovative Strategies for the Coverage Problem: Path Planning, Search Optimization, and Applications in Underwater Robotics. Journal of Marine Science and Engineering, 13(7), 1369. https://doi.org/10.3390/jmse13071369