Dynamic Stochastic Model Optimization for Underwater Acoustic Navigation via Singular Value Decomposition

 , , , ,
, , , ,
Abstract
1. Introduction
2. Model Construction
2.1. Acoustic Observations Model Based Euclidean Distance
2.2. Acoustic Observations Model Based on Acoustic Ray Tracing Method
2.3. Extended Kalman Filter Algorithm
3. Optimization Methods
3.1. Construction of Stochastic Model Based on Singular Value Decomposition
3.2. Depth-Constrained Observation Augmentation
4. Experiments and Analysis
- Scheme 1: Conventional equal-weight stochastic model;
- Scheme 2: Depth-constrained equal-weight stochastic model;
- Scheme 3: Depth-constrained adaptive stochastic model optimization based on SVD.
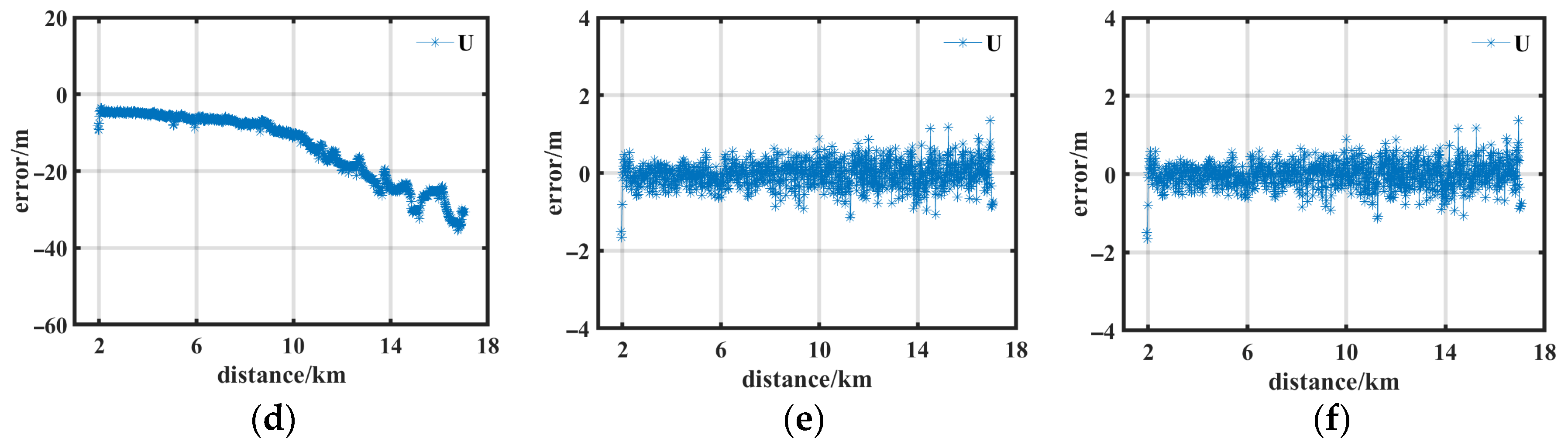
4.1. Experiment at a Water Depth of 300 m
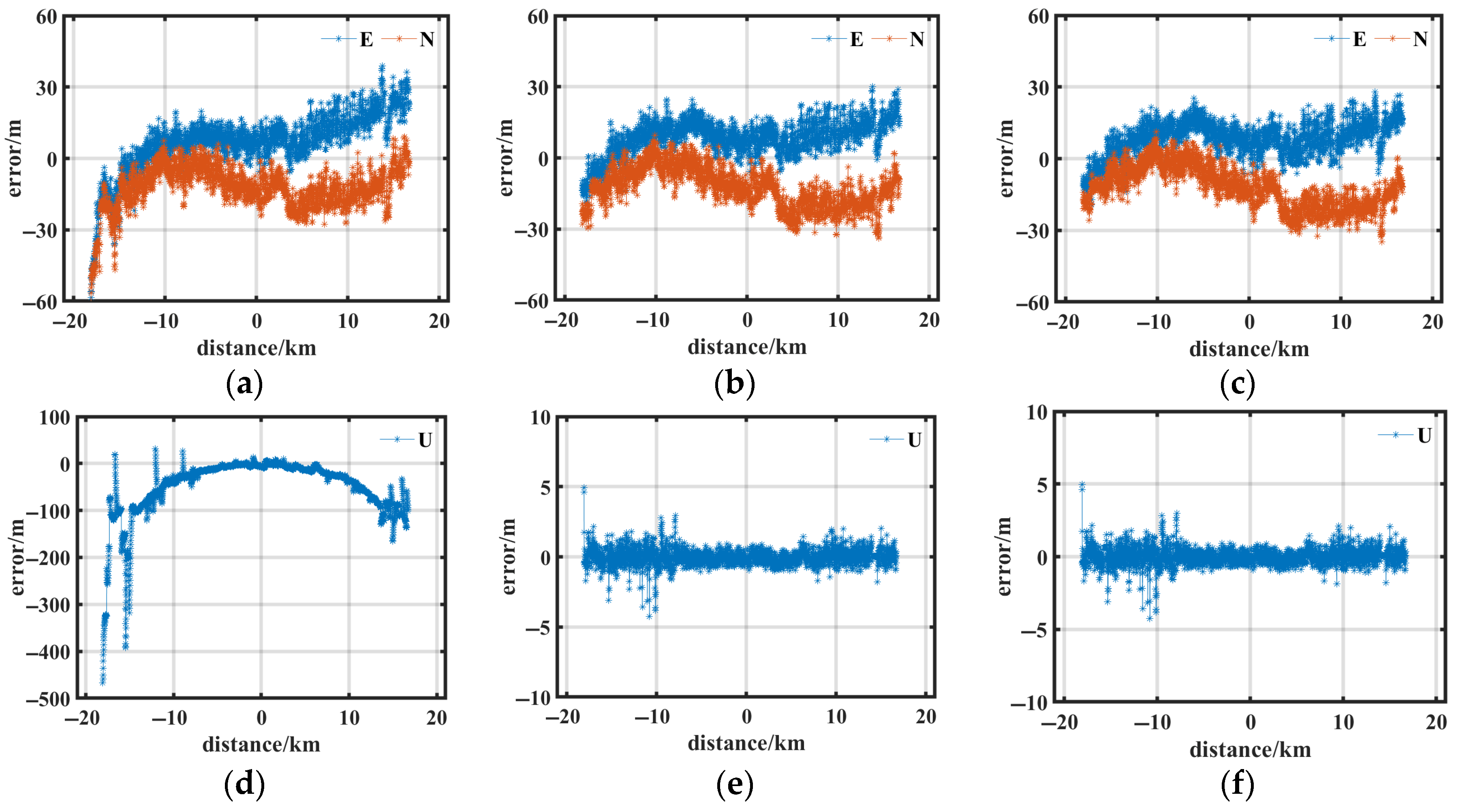
4.2. Experiment at a Water Depth of 2000 m
5. Discussion
- Dynamic Covariance Adaptation Mechanism
- 2.
- Absolute Depth Reference Fusion Mechanism
- Time Synchronization Error
- 2.
- Sensor Displacement Induced by Deep-Ocean Currents
- 3.
- System Integration and Application
6. Conclusions
- By establishing a geometric sensitivity analysis framework through SVD of the acoustic observation matrix, we achieved dynamic weighting of the beacon contributions to dominant navigation directions. This approach enables precise suppression of error propagation in both the horizontal and vertical dimensions, particularly addressing the vertical error dominance inherent in conventional equal-weight models.
- The experimental results demonstrate the method’s effectiveness in complex underwater environments. The RMS error reduction (from 2.81 m to 0.93 m) in the 300 m depth scenario is 66.65%, and the RMS error reduction (from 8.04 m to 1.83 m) in the 2000 m depth scenario is 77.25%. These improvements confirm that the proposed method significantly enhances the robustness and navigation accuracy of underwater navigation in complex environments under different underwater acoustic conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Li, X. Micro-PNT, comprehensive PNT. Acta Geod. Cartogr. Sin. 2017, 46, 1249–1254. [Google Scholar] [CrossRef]
- Xu, J.; Lin, E.; He, H.; Wu, M. Underwater PNT technology and perspectives. Aerodyn. Missile J. 2021, 6, 139–147. [Google Scholar]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater acoustic modems. IEEE Sens. J. 2016, 16, 4063–4071. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Sun, D.; Xu, T.; Xue, S.; Han, Y.; Zeng, A. Seafloor geodetic network establishment and key technologies. Sci. China Earth Sci. 2020, 63, 1188–1198. [Google Scholar] [CrossRef]
- Liu, J.; Chen, G.; Zhao, J.; Gao, K.; Liu, Y. Development and trends of marine space-time frame network. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 17–37. [Google Scholar] [CrossRef]
- Liu, Y.; Li, M.; Liu, Y.; He, X.; Chen, G.; Zhang, L.; Tang, Q. Research progress of seafloor geodetic datum construction technology. Adv. Mar. Sci. 2022, 40, 684–700. [Google Scholar]
- Busacca, F.; Galluccio, L.; Palazzo, S.; Panebianco, A. A comparative analysis of predictive channel models for real shallow water environments. Comput. Netw. 2024, 250, 110557. [Google Scholar] [CrossRef]
- Yasuda, K.; Tadokoro, K.; Taniguchi, S.; Kimura, H.; Matsuhiro, K. Interplate locking condition derived from seafloor geodetic observation in the shallowest subduction segment at the Central Nankai Trough, Japan. Geophys. Res. Lett. 2017, 44, 3572–3579. [Google Scholar] [CrossRef]
- Watanabe, S.-I.; Ishikawa, T.; Yokota, Y.; Nakamura, Y. GARPOS: Analysis software for the GNSS-A seafloor positioning with simultaneous estimation of sound speed structure. Front. Earth Sci. 2020, 8, 597532. [Google Scholar] [CrossRef]
- Sakic, P.; Ballu, V.; Royer, J.Y. A multi-observation least-squares inversion for GNSS-A seafloor positioning. Remote Sens. 2020, 12, 448. [Google Scholar] [CrossRef]
- Chadwell, C.D.; Sweeney, A.D. Acoustic ray-trace equations for seafloor geodesy. Mar. Geod. 2010, 33, 164–186. [Google Scholar] [CrossRef]
- Cao, J.; Zheng, C.; Sun, D.; Zhang, D. Travel time processing for LBL positioning system. In Proceedings of the 2016 IEEE/OES China Ocean Acoustics (COA), Harbin, China, 9–11 January 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, X.; Zhang, D. Short baseline underwater positioning principle and error. Ship Electron. Eng. 2017, 37, 41–45. [Google Scholar] [CrossRef]
- Jia, C.; Wen, Q.; Zou, Z.; Nie, Z. Underwater real-time heading determination method by using a dual-beacon design of USBL acoustic positioning. IEEE Sens. J. 2025, 25, 10163–10173. [Google Scholar] [CrossRef]
- Xia, M.; Zhang, T.; Wang, J.; Zhang, L.; Zhu, Y.; Guo, L. The fine calibration of the Ultra-Short baseline system with inaccurate measurement noise covariance matrix. IEEE Trans. Instrum. Meas. 2022, 71, 1–8. [Google Scholar] [CrossRef]
- Tian, T. Underwater Positioning and Navigation Technology; National Defense Industry Press: Beijing, China, 2007. [Google Scholar]
- Zhu, Y.; Zhou, L. Hybrid tightly-coupled SINS/LBL for underwater navigation system. IEEE Access 2024, 12, 31279–31286. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, T.; Nie, W.; Wang, J.; Shu, J.; Zhang, S.; Yang, W. High-precision LBL/INS round-trip tightly coupled navigation based on constrained acoustic ray-tracking and RTS smoothing. IEEE Trans. Veh. Technol. 2024, 73, 16432–16444. [Google Scholar] [CrossRef]
- Sato, M.; Fujita, M.; Matsumoto, Y.; Saito, H.; Ishikawa, T.; Asakura, T. Improvement of GPS/acoustic seafloor positioning precision through controlling the ship’s track line. J. Geod. 2013, 87, 825–842. [Google Scholar] [CrossRef]
- Chen, G.; Liu, Y.; Liu, Y.; Tian, Z.; Li, M. Adjustment of transceiver lever arm offset and sound speed bias for GNSS-A positioning. Remote Sens. 2019, 11, 1606. [Google Scholar] [CrossRef]
- Yang, Y.; Ming, F. Current status and future development of spatiotemporal datum construction in China. Sci. China Earth Sci. 2023, 66, 2162–2165. [Google Scholar] [CrossRef]
- Ikuta, R.; Tadokoro, K.; Ando, M.; Okuda, T.; Sugimoto, S.; Takatani, K.; Yada, K.; Besana, G.M. A new GPS-acoustic method for measuring ocean floor crustal deformation: Application to the Nankai Trough. J. Geophys. Res.-Solid Earth 2008, 113, B02401. [Google Scholar] [CrossRef]
- Fujita, M.; Ishikawa, T.; Mochizuki, M.; Sato, M.; Toyama, S.; Katayama, M.; Kawai, K.; Matsumoto, Y.; Yabuki, T.; Asada, A.; et al. GPS/acoustic seafloor geodetic observation: Method of data analysis and its application. Earth Planets Space 2006, 58, 265–275. [Google Scholar] [CrossRef]
- Li, X.; Li, W.; Yi, X.; Huang, Q.; Wang, Y.; Ye, C. Path-specific Underwater Acoustic Channel Tracking and its Application in Passive Time Reversal Mirror. arXiv 2021, arXiv:2103.00874. [Google Scholar]
- Shi, J.; Leau, Y.-B.; Li, K.; Chen, H. Optimal Variational Mode Decomposition and Integrated Extreme Learning Machine for Network Traffic Prediction. IEEE Access 2021, 9, 51818–51831. [Google Scholar] [CrossRef]
- Sakic, P.; Ballu, V.; Crawford, W.C.; Wöppelmann, G. Acoustic ray tracing comparisons in the context of geodetic precise off-shore positioning experiments. Mar. Geod. 2018, 41, 315–330. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, H.; Wu, M. A sound ray tracking algorithm based on template interpolation of constant gradient sound velocity. Geomat. Inf. Sci. Wuhan Univ. 2021, 46, 71–78. [Google Scholar] [CrossRef]
- Xin, M.; Yang, F.; Xue, S.; Wang, Z.; Han, Y. A constant gradient sound ray tracing underwater positioning algorithm considering incident beam angle. Acta Geod. Cartogr. Sin. 2020, 49, 1535–1542. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, Z.; Liu, H. Investigation on underwater positioning stochastic model based on sound ray incidence angle. Acta Geod. Cartogr. Sin. 2018, 47, 1280–1289. [Google Scholar] [CrossRef]
- Yan, F.; Wang, Z.; Zhao, S.; Nie, Z.; Sun, Z.; Li, W. A layered constant gradient acoustic ray tracing underwater positioning algorithm considering round-trip acoustic path. Acta Geod. Cartogr. Sin. 2022, 51, 31–40. [Google Scholar] [CrossRef]
- Chen, H. Travel-time approximation of acoustic ranging in GPS/Acoustic seafloor geodesy. Ocean Eng. 2014, 84, 133–144. [Google Scholar] [CrossRef]
- Chen, H.-H.; Wang, C.-C.; Chuang, W.-N.; Lin, B.-H.; Li, K.-H.; Su, J.-D. Linear and bilinear approximations of sound speed profiles in GPS/Acoustic seafloor geodesy. In Proceedings of the IEEE International Underwater Technology Symposium, Tokyo, Japan, 5–8 March 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Xu, T.; Nie, W.; Yu, X. The construction of sound speed field based on back propagation neural network in the global ocean. Mar. Geod. 2020, 43, 621–642. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, F.; Zhang, H.; Wang, S. Establishment of spatial model for sound velocity in local. Geomat. Inf. Sci. Wuhan Univ. 2008, 33, 199–202. [Google Scholar]
- Liu, Y.; Wang, Z.; Zhao, S. Layered-EOFs based adaptive reconstruction of sound velocity profile in multi-beam sounding. Tech. Acoust. 2019, 39, 372–378. [Google Scholar]
- Yang, Y.; Qin, X. Resilient observation models for seafloor geodetic positioning. J. Geod. 2021, 95, 79. [Google Scholar] [CrossRef]
- Zhao, J.; Zou, Y.; Wu, Y.; Fang, S. Determination of underwater control point coordinates based on the constraint of water depth. J. Harbin Inst. Technol. 2016, 48, 137. [Google Scholar] [CrossRef]
- Qin, X.; Yang, Y.; Sun, B. A robust method to estimate the coordinates of seafloor stations by direct-path ranging. Mar. Geod. 2023, 46, 83–98. [Google Scholar] [CrossRef]
- Yang, F.; Lu, X.; Li, J.; Han, L.; Zheng, Z. Precise positioning of underwater static objects without sound speed profile. Mar. Geod. 2011, 34, 138–151. [Google Scholar] [CrossRef]
- Yang, Y. Resilient PNT concept frame. Acta Geod. Cartogr. Sin. 2018, 47, 893–898. [Google Scholar] [CrossRef]
- Liu, Y.; Xue, S.; Lu, X.; Wang, X.; Qi, K.; Wang, S. Optimization on underwater positioning stochastic model based on sound ray elevation angle. Hydrogr. Surv. Charting 2021, 41, 21–25. [Google Scholar] [CrossRef]
- Wang, X.; Xue, S.; Qu, G.; Liu, Y.; Yang, W. Disturbance analysis of underwater positioning acoustic ray and design of piecewise exponential weight function. Acta Geod. Cartogr. Sin. 2021, 50, 982–989. [Google Scholar]
- Wang, W.; Ouyang, Y.; Ma, Y.; Dong, C. Application of Helmert variance component estimation in underwater acoustic positioning. J. Ocean Technol. 2020, 39, 83–88. [Google Scholar]
- Meng, Q.; Wang, Z.; Liu, Y.; Wang, B. Application of robust Helmert variance component estimation in underwater acoustic positioning. Hydrogr. Surv. Charting 2019, 39, 70–74. [Google Scholar] [CrossRef]
- Li, J. Research on Underwater Acoustic Navigation Filtering Algorithm Under Combined State. Master’s Thesis, School of Geological Engineering and Geomatics, Chang’an University, Xi’an, China, 2023. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Underwater Vehicle’s Position | Scheme | RMS-E/m | RMS-N/m | RMS-U/m | RMS-3D/m |
|---|---|---|---|---|---|
| Inside Baselines | Scheme 1 | 1.95 | 0.36 | 1.99 | 2.81 |
| Scheme 2 | 1.12 | 1.02 | 0.12 | 1.52 | |
| Scheme 3 | 0.85 | 0.52 | 0.12 | 1.00 | |
| Outside Baselines | Scheme 1 | 13.76 | 7.15 | 20.82 | 25.96 |
| Scheme 2 | 10.05 | 5.46 | 0.31 | 11.44 | |
| Scheme 3 | 7.99 | 3.29 | 0.31 | 8.65 |
| Underwater Vehicle’s Position | Scheme | RMS-E/m | RMS-N/m | RMS-U/m | RMS-3D/m |
|---|---|---|---|---|---|
| Inside Baselines | Scheme 1 | 4.45 | 7.14 | 3.11 | 8.97 |
| Scheme 2 | 4.76 | 7.47 | 0.21 | 8.86 | |
| Scheme 3 | 4.60 | 7.39 | 0.20 | 8.71 | |
| Outside Baselines | Scheme 1 | 14.28 | 14.36 | 80.40 | 82.91 |
| Scheme 2 | 11.13 | 13.61 | 1.34 | 17.63 | |
| Scheme 3 | 10.49 | 13.12 | 1.34 | 16.85 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, J.; Xu, T.; Shu, J.; Liu, Y.; Ma, Y.; Xu, Y. Dynamic Stochastic Model Optimization for Underwater Acoustic Navigation via Singular Value Decomposition. J. Mar. Sci. Eng. 2025, 13, 1329. https://doi.org/10.3390/jmse13071329
Li J, Wang J, Xu T, Shu J, Liu Y, Ma Y, Xu Y. Dynamic Stochastic Model Optimization for Underwater Acoustic Navigation via Singular Value Decomposition. Journal of Marine Science and Engineering. 2025; 13(7):1329. https://doi.org/10.3390/jmse13071329
Chicago/Turabian StyleLi, Jialu, Junting Wang, Tianhe Xu, Jianxu Shu, Yangfan Liu, Yueyuan Ma, and Yangyin Xu. 2025. "Dynamic Stochastic Model Optimization for Underwater Acoustic Navigation via Singular Value Decomposition" Journal of Marine Science and Engineering 13, no. 7: 1329. https://doi.org/10.3390/jmse13071329
APA StyleLi, J., Wang, J., Xu, T., Shu, J., Liu, Y., Ma, Y., & Xu, Y. (2025). Dynamic Stochastic Model Optimization for Underwater Acoustic Navigation via Singular Value Decomposition. Journal of Marine Science and Engineering, 13(7), 1329. https://doi.org/10.3390/jmse13071329