
Optimized Deployment of Generalized OCDM in Deep-Sea Shadow-Zone Underwater Acoustic Channels

Abstract
1. Introduction
- (1)
- The impact of broadband Doppler effects on the OCDM system in underwater acoustic communication is analyzed.
- (2)
- A GOCDM-based underwater acoustic communication system, including transmitter and receiver design, is proposed. By deriving the system model, a theoretical analysis demonstrates that GOCDM inherits the full subcarrier frequency diversity and multipath resilience advantages of OCDM. Simulations confirm GOCDM’s effectiveness in mitigating multipath effects and reducing the PAPR, as well as evaluating the impact of the carrier frequency offset on these modulation schemes.
- (3)
- Deep-sea experiments were conducted to evaluate the performance of OFDM, OCDM, and GOCDM in shadow-zone communication. To the best of our knowledge, this is the first experimental demonstration of shadow-zone communication using the bottom-bounce method. The results demonstrate that GOCDM outperforms the other two schemes in low-SNR, complex multipath deep-sea environments.
2. Research Foundation
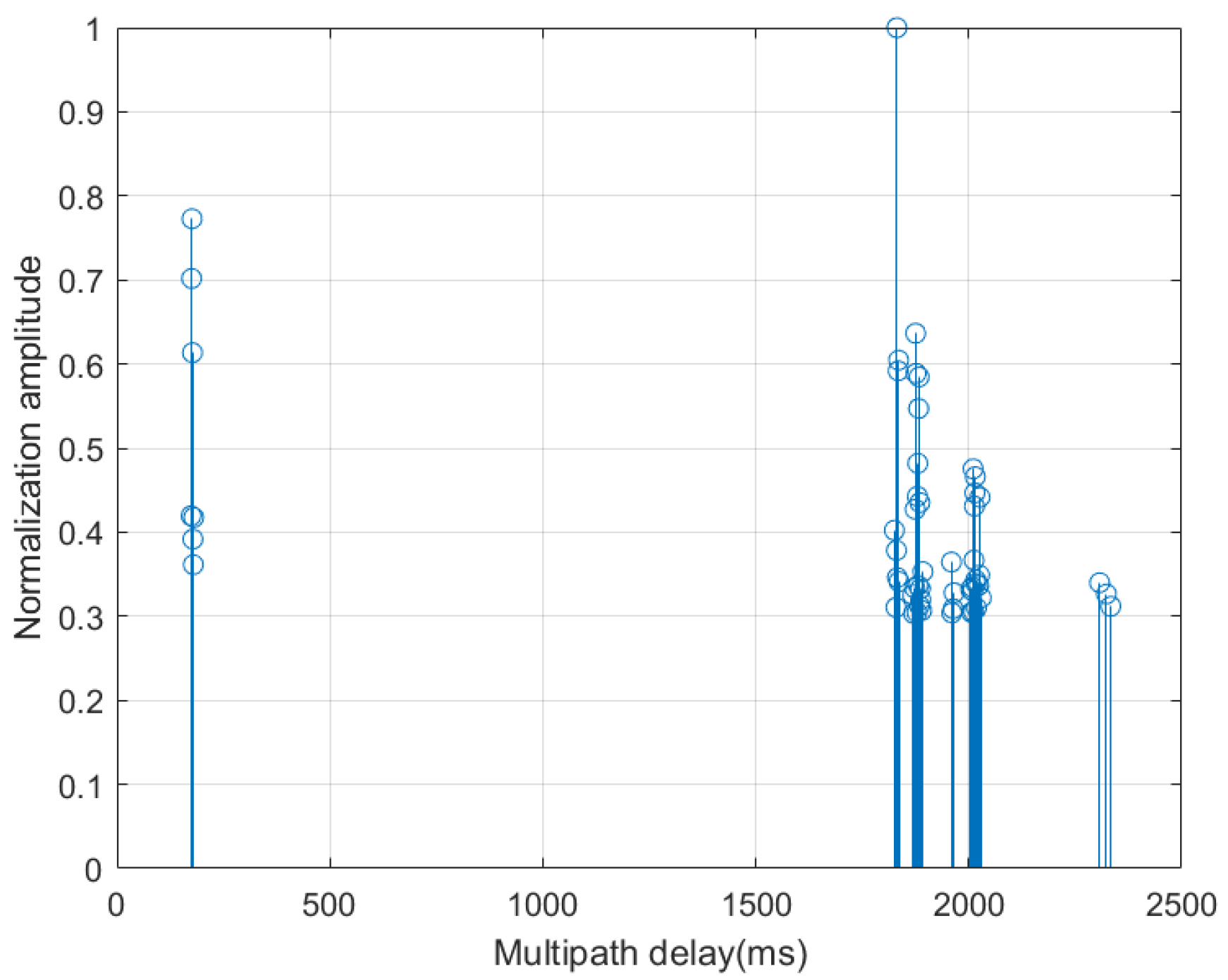
2.1. Characteristics of Deep-Sea Shadow-Zone Channels
2.2. Fundamentals of OCDM
2.3. Impact of Non-Uniform Doppler Effects on OCDM
3. GOCDM Underwater Acoustic Communication System
3.1. GOCDM Modulation and Demodulation
3.2. Properties of GOCDM
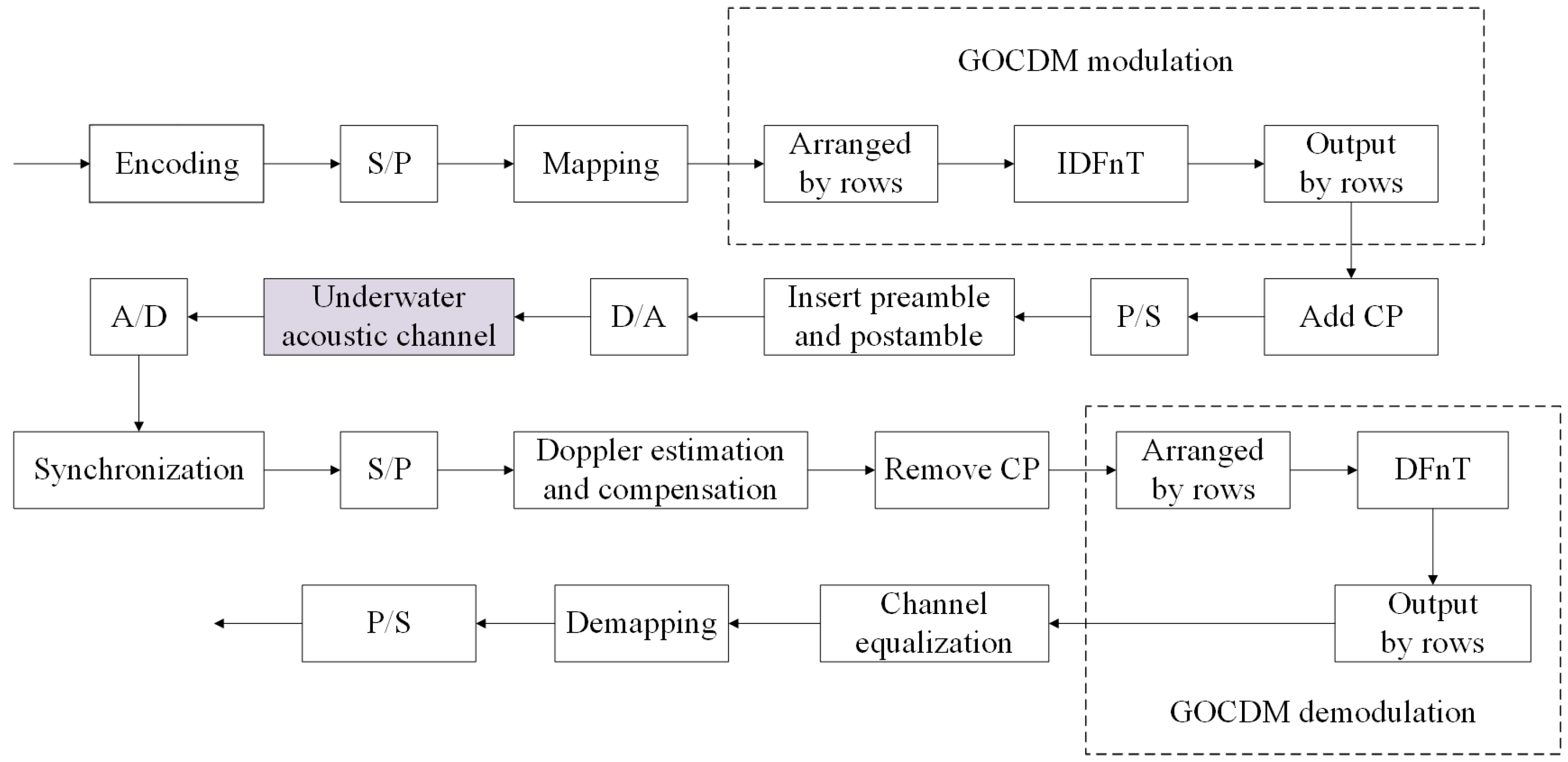
3.3. Underwater Acoustic Communication GOCDM System
4. Simulation
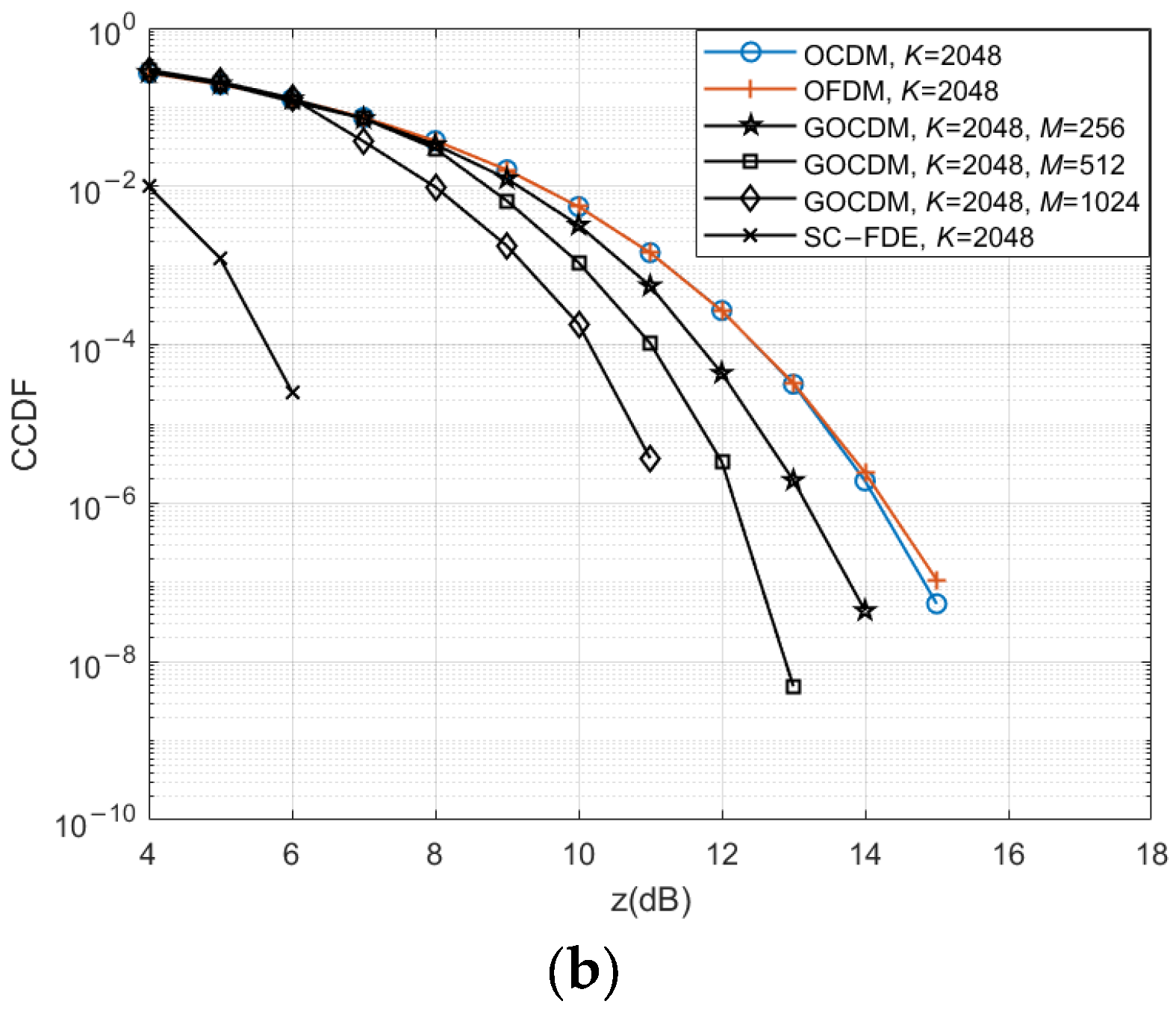
4.1. Peak-to-Average Power Ratio Performance
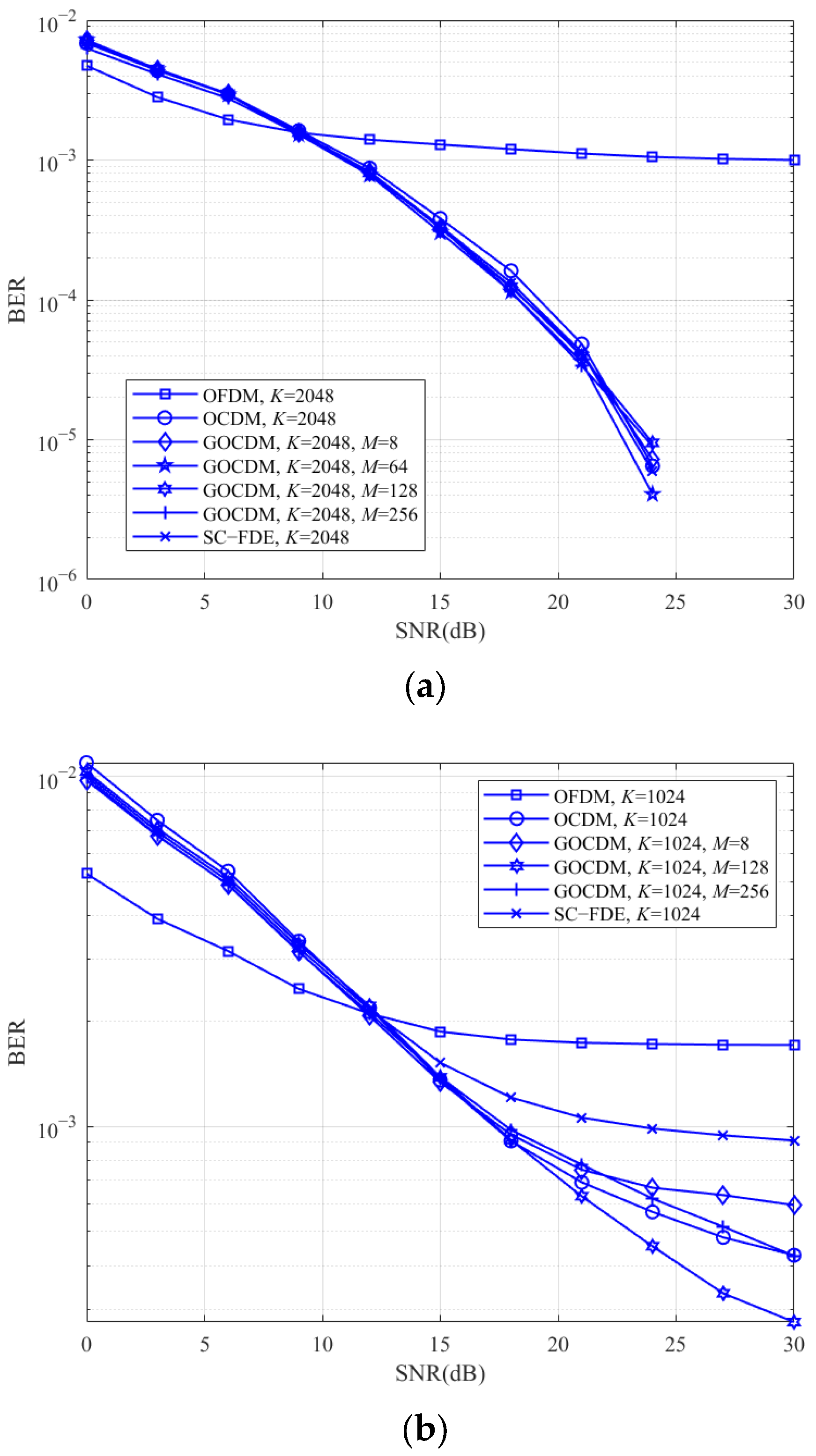
4.2. Performance in an Ideal Multipath Channel
4.3. Impact of Doppler Shift
5. Deep-Sea Experiment
6. Discussion
6.1. Performance Analysis
6.2. Summary and Future Research Recommendations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Zvonar, Z.; Brady, D.; Catipovic, J. An adaptive decentralized multi-user receiver for deep-water acoustic telemetry. J. Acoust. Soc. Amer. 1997, 101, 2384–2387. [Google Scholar] [CrossRef]
- Kang, T.; Song, H.C.; Hodgkiss, W.S. Long-range multi-carrier acoustic communication in deep water using a towed horizontal array. J. Acoust. Soc. Amer. 2012, 131, 4665–4671. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Diamant, R. Adaptive Modulation for Long-Range Underwater Acoustic Communication. IEEE Trans. Wirel. Commun. 2020, 19, 6844–6857. [Google Scholar] [CrossRef]
- Li, J.; Zakharov, Y.V. Efficient Use of Space-Time Clustering for Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2018, 43, 173–183. [Google Scholar] [CrossRef]
- Du, P.; Zhu, X.; Wang, C. Experimental Demonstration of Underwater Acoustic Communication over Deep-sea Channel. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Shi, Y.; Guo, L.; Wang, S. Long Distance Commucation Technology of Deep sea Acoustic Release Transponder. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Zhou, T.; He, Z.; Zhang, B.; Fan, M.; Wang, Y. Research on Deep-sea Acoustic Communication Method Based on Directional Transducer. In Proceedings of the 2023 6th International Conference on Information Communication and Signal Processing (ICICSP), Xi’an, China, 23–25 September 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Z.-H.; Zhou, S.; Catipovic, J.; Huang, J. OFDM in deep water acoustic channels with extremely longdelay spread. In Proceedings of the 5th International Workshop on Underwater Networks, Woods Hole, MA, USA, 30 September–1 October 2010; Association for Computing Machinery: New York, NY, USA, 2010. [Google Scholar]
- Moose, P.H. A technique for orthogonal frequency division multiplexing frequency offset correction. IEEE Trans. Commun. 1994, 42, 2908–2914. [Google Scholar] [CrossRef]
- Schmidl, T.M.; Cox, D.C. Robust frequency and timing synchronization for OFDM. IEEE Trans. Commun. 1997, 45, 1613–1621. [Google Scholar] [CrossRef]
- van de Beek, J.J.; Sandell, M.; Borjesson, P.O. ML estimation of time and frequency offset in OFDM systems. IEEE Trans. Signal Process. 1997, 45, 1800–1805. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier Communication Over Underwater Acoustic Channels With Nonuniform Doppler Shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar] [CrossRef]
- Kang, T.; Iltis, R.A. Iterative Carrier Frequency Offset and Channel Estimation for Underwater Acoustic OFDM Systems. IEEE J. Sel. Areas Commun. 2008, 26, 1650–1661. [Google Scholar] [CrossRef]
- Li, B.; Huang, J.; Zhou, S.; Ball, K.; Stojanovic, M.; Freitag, L.; Willett, P. MIMO-OFDM for High-Rate Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2009, 34, 634–644. [Google Scholar] [CrossRef]
- Berger, C.R.; Zhou, S.; Preisig, J.C.; Willett, P. Sparse Channel Estimation for Multicarrier Underwater Acoustic Communication: From Subspace Methods to Compressed Sensing. IEEE Trans. Signal Process. 2010, 58, 1708–1721. [Google Scholar] [CrossRef]
- Wen, M.; Cheng, X.; Yang, L.; Li, Y.; Cheng, X.; Ji, F. Index modulated OFDM for underwater acoustic communications. IEEE Commun. Mag. 2016, 54, 132–137. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and Internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Ouyang, X.; Zhao, J. Orthogonal Chirp Division Multiplexing. IEEE Trans. Commun. 2016, 64, 3946–3957. [Google Scholar] [CrossRef]
- Ouyang, X.; Zhao, J. Orthogonal Chirp Division Multiplexing for Coherent Optical Fiber Communications. J. Light. Technol. 2016, 34, 4376–4386. [Google Scholar] [CrossRef]
- Bouvet, P.-J.; Auffret, Y.; Aubry, C. On the analysis of orthogonal chirp division multiplexing for shallow water underwater acoustic communication. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Zhu, P.; Xu, X.; Tu, X.; Chen, Y.; Tao, Y. Anti-Multipath Orthogonal Chirp Division Multiplexing for Underwater Acoustic Communication. IEEE Access 2020, 8, 13305–13314. [Google Scholar] [CrossRef]
- Jia, Z.; Zhang, R.; Chen, Z.; Yuan, F. OCDM with Index Modulation for Autonomous Underwater Vehicles Communication. IEEE Trans. Intell. Veh. 2024, 1–16. [Google Scholar] [CrossRef]
- Lu, D.; Wang, Y.; Liu, L.; Ma, X. Channel Estimation for MIMO-OCDM with Fresnel Domain Pilots. In Proceedings of the ICC 2024—IEEE International Conference on Communications, Denver, CO, USA, 9–13 June 2024; pp. 3128–3133. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y.; Li, Y.; Guan, X. Underwater Acoustic Communications Based on OCDM for Internet of Underwater Things. IEEE Internet Things J. 2023, 10, 22128–22142. [Google Scholar] [CrossRef]
- Wang, J.; Tao, Q.; Han, G.; Fu, X.; Wang, Q. Orthogonal Chirp Division Multiplexing Based on Dictionary Theory for Integrated Sonar and Communication System. IEEE Commun. Lett. 2024, 28, 1688–1692. [Google Scholar] [CrossRef]
- Jiang, T.; Xiang, W.; Richardson, P.C.; Qu, D.; Zhu, G. On the Nonlinear Companding Transform for Reduction in PAPR of MCM Signals. IEEE Trans. Wirel. Commun. 2007, 6, 2017–2021. [Google Scholar] [CrossRef]
- Wang, Y.-C.; Luo, Z.-Q. Optimized Iterative Clipping and Filtering for PAPR Reduction of OFDM Signals. IEEE Trans. Commun. 2011, 59, 33–37. [Google Scholar] [CrossRef]
- Slimane, S.B. Reducing the Peak-to-Average Power Ratio of OFDM Signals Through Precoding. IEEE Trans. Veh. Technol. 2007, 56, 686–695. [Google Scholar] [CrossRef]
- Suehiro, N.; Han, C.; Imoto, T. Very efficient wireless fyequency usage based on pseudo-coherent addition of multipath signals using kronecker product with rows of dft matrix. In Proceedings of the IEEE International Symposium on Information Theory, Yokohama, Japan, 4 July 2003; p. 385. [Google Scholar] [CrossRef]
- Ebihara, T.; Mizutani, K. Underwater Acoustic Communication With an Orthogonal Signal Division Multiplexing Scheme in Doubly Spread Channels. IEEE J. Ocean. Eng. 2014, 39, 47–58. [Google Scholar] [CrossRef]
- Ebihara, T.; Leus, G. Doppler-Resilient Orthogonal Signal-Division Multiplexing for Underwater Acoustic Communication. IEEE J. Ocean. Eng. 2016, 41, 408–427. [Google Scholar] [CrossRef]
- Han, J.; Chepuri, S.P.; Zhang, Q.; Leus, G. Iterative Per-Vector Equalization for Orthogonal Signal-Division Multiplexing Over Time-Varying Underwater Acoustic Channels. IEEE J. Ocean. Eng. 2019, 44, 240–255. [Google Scholar] [CrossRef]
- Han, J.; Zhang, L.; Zhang, Q.; Leus, G. Low-Complexity Equalization of Orthogonal Signal-Division Multiplexing in Doubly-Selective Channels. IEEE Trans. Signal Process. 2019, 67, 915–929. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, H.; Yao, H.; Hu, Z.; Cui, Y.; Wan, D. Generalized Orthogonal Chirp Division Multiplexing in Doubly Selective Channels. IEEE Internet Things J. 2024, 12, 18495–18507. [Google Scholar] [CrossRef]
- Xiao, P.; Yang, K.D. Temporal coherence of acoustic signal transmissions in a fluctuating deep ocean. J. Comput. Acoust. 2016, 24, 3. [Google Scholar] [CrossRef]
- Pecknold, S.P.; Renaud, W.M.; McGaughey, D.R.; Theriault, J.A.; Marsden, R.F. Improved Active Sonar Performance Using Costas Waveforms. IEEE J. Ocean. Eng. 2009, 34, 559–574. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Value |
|---|---|
| Sampling rate | 64 kHz |
| Bandwidth | 2 kHz |
| Number of subcarriers | 1024 |
| Constellation mapping | QPSK |
| Channel estimation | MMSE |
| Coding rate | 1/2 |
| Transmitter and Receiver Locations | Modulation Scheme | Transmitter Vessel Speed/kn | Receiver Vessel Speed/kn | Transducer Depth/m | Hydrophone Depth/m | Received Signal SNR/dB | BER |
|---|---|---|---|---|---|---|---|
| A–B | OFDM | 4.1 | 5.0 | 80 | 360 | 0.016 | 0.19 |
| OCDM | 0.33 | ||||||
| SC-FDE | 0.06 | ||||||
| GOCDM | 0.08 | ||||||
| C–D | OFDM | 3.8 | 4.1 | 94 | 360 | 6.8 | 0.12 |
| OCDM | 0.03 | ||||||
| SC-FDE | 0.04 | ||||||
| GOCDM | 0 | ||||||
| E–F | OFDM | 4.3 | 3.8 | 85 | 307 | 4.2 | 0.23 |
| OCDM | 0.05 | ||||||
| SC-FDE | 0.01 | ||||||
| GOCDM | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Chi, C.; Fan, Y.; Pu, Z.; Wang, W.; Yin, L.; Li, Y.; Huang, H. Optimized Deployment of Generalized OCDM in Deep-Sea Shadow-Zone Underwater Acoustic Channels. J. Mar. Sci. Eng. 2025, 13, 1312. https://doi.org/10.3390/jmse13071312
Yu H, Chi C, Fan Y, Pu Z, Wang W, Yin L, Li Y, Huang H. Optimized Deployment of Generalized OCDM in Deep-Sea Shadow-Zone Underwater Acoustic Channels. Journal of Marine Science and Engineering. 2025; 13(7):1312. https://doi.org/10.3390/jmse13071312
Chicago/Turabian StyleYu, Haodong, Cheng Chi, Yongxing Fan, Zhanqing Pu, Wei Wang, Li Yin, Yu Li, and Haining Huang. 2025. "Optimized Deployment of Generalized OCDM in Deep-Sea Shadow-Zone Underwater Acoustic Channels" Journal of Marine Science and Engineering 13, no. 7: 1312. https://doi.org/10.3390/jmse13071312
APA StyleYu, H., Chi, C., Fan, Y., Pu, Z., Wang, W., Yin, L., Li, Y., & Huang, H. (2025). Optimized Deployment of Generalized OCDM in Deep-Sea Shadow-Zone Underwater Acoustic Channels. Journal of Marine Science and Engineering, 13(7), 1312. https://doi.org/10.3390/jmse13071312