
Pectoral Fin-Assisted Braking and Agile Turning: A Biomimetic Approach to Improve Underwater Robot Maneuverability



Abstract
1. Introduction
2. Materials and Methods
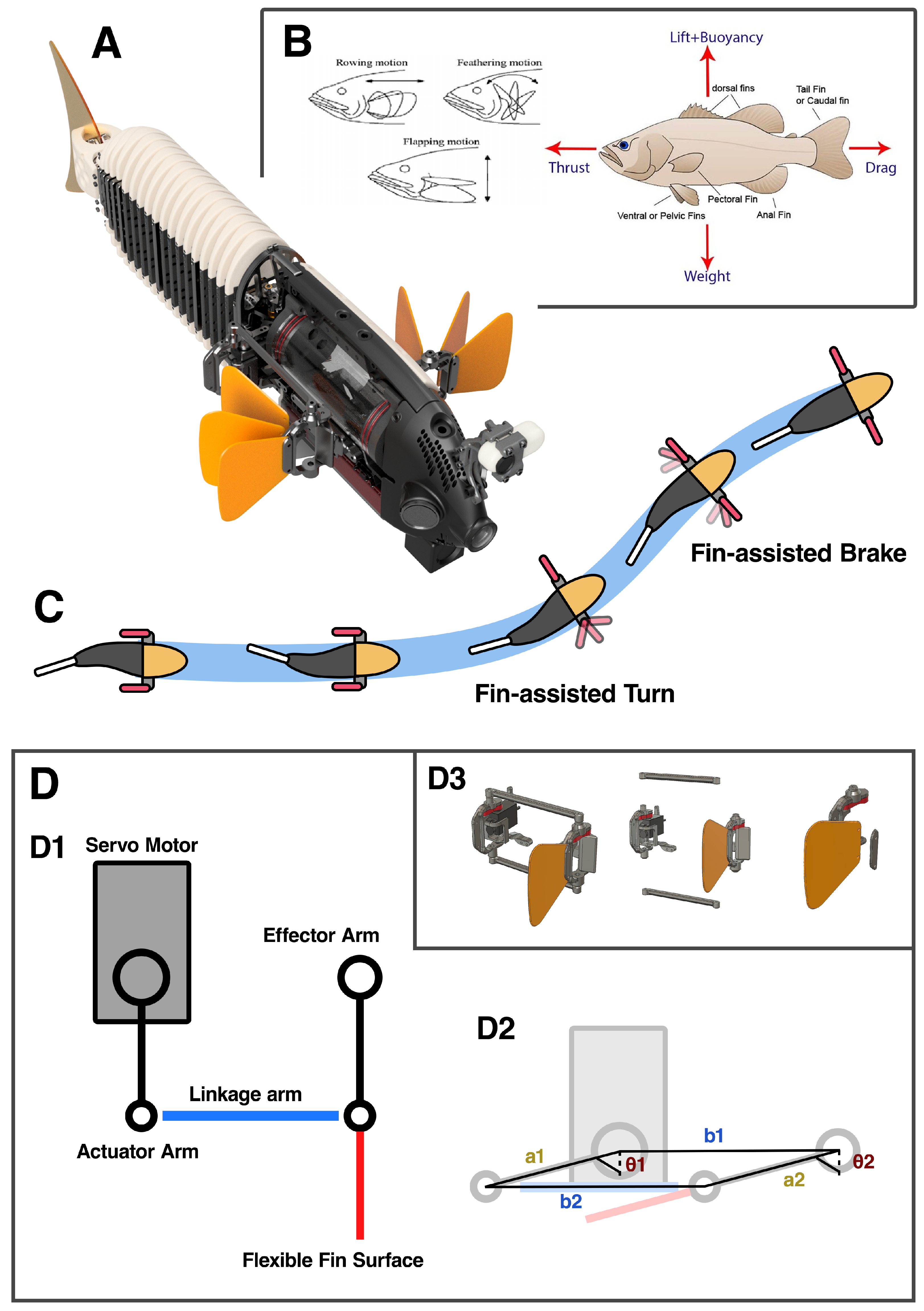
2.1. Pectoral Fin Design
2.1.1. Aim and Background
2.1.2. Design and Construction of the Servo Pectoral Fin Mechanism
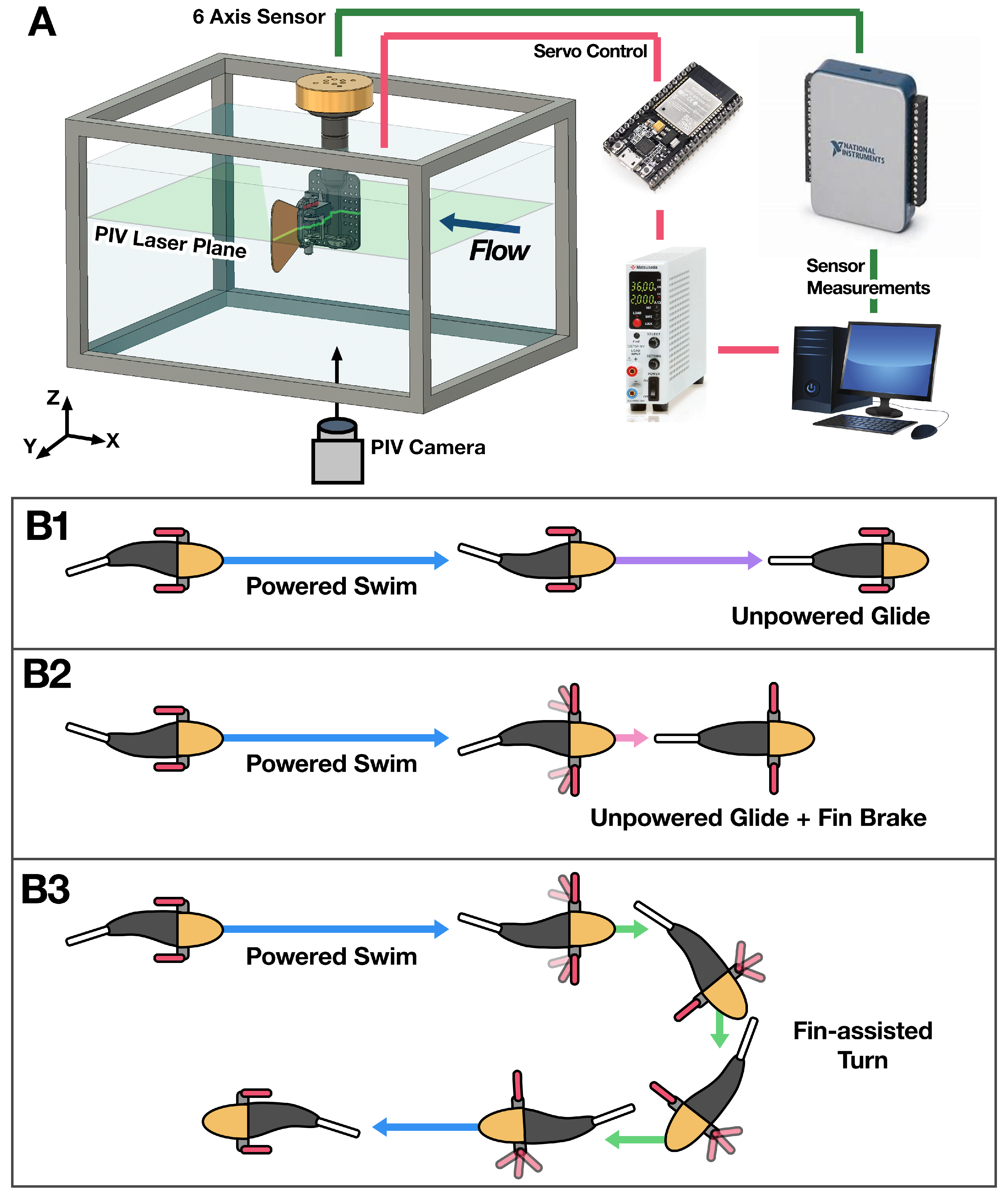
2.2. Experimental Setup
- Water circulation tank: A recirculating water tank with flow velocity control.
- Fin mechanism: A stripped down version of the biomimetic pectoral fin mechanism.
- Control system: An ESP32 microcontroller (Adafruit, NY, USA) running CircuitPython v9.2.8, programmed with the same control algorithms used in the SpineWave robot to ensure consistent behavior.
- Force measurement: An ATI (NC, USA) Gamma US-15-50 six-axis force/torque sensor connected to the fin mechanism via a custom 3D-printed adapter.
- Data acquisition: National Instruments (TX, USA) DAQ for force data collection.
- Flow visualization: A particle image velocimetry (PIV) system consisting of a continuous laser sheet and a high-speed camera for selected experiments.
- –
- Illumination: 532 nm continuous laser (SM-SEMI-532nm-10W) generating a 2 mm thick horizontal light sheet
- –
- Tracers: 10-μm hollow glass spheres (Dantec) with specific density 1.1 g/cm3 for flow seeding
- –
- Imaging: High-speed CCD camera (Photron, 1280 × 1024 pixels) sampling at 105 fps beneath the channel floor
- –
- Processing: Cross-correlation algorithm with multi-pass scheme and 2 × 3 Gaussian sub-pixel fitting
- –
- Parameters: 25 × 25 pixel interrogation windows (50% overlap) yielding velocity vectors at 3.75 × 3.75 mm2 spatial resolution
2.3. Static Behavior of the Pectoral Fin Under Constant Flow Conditions
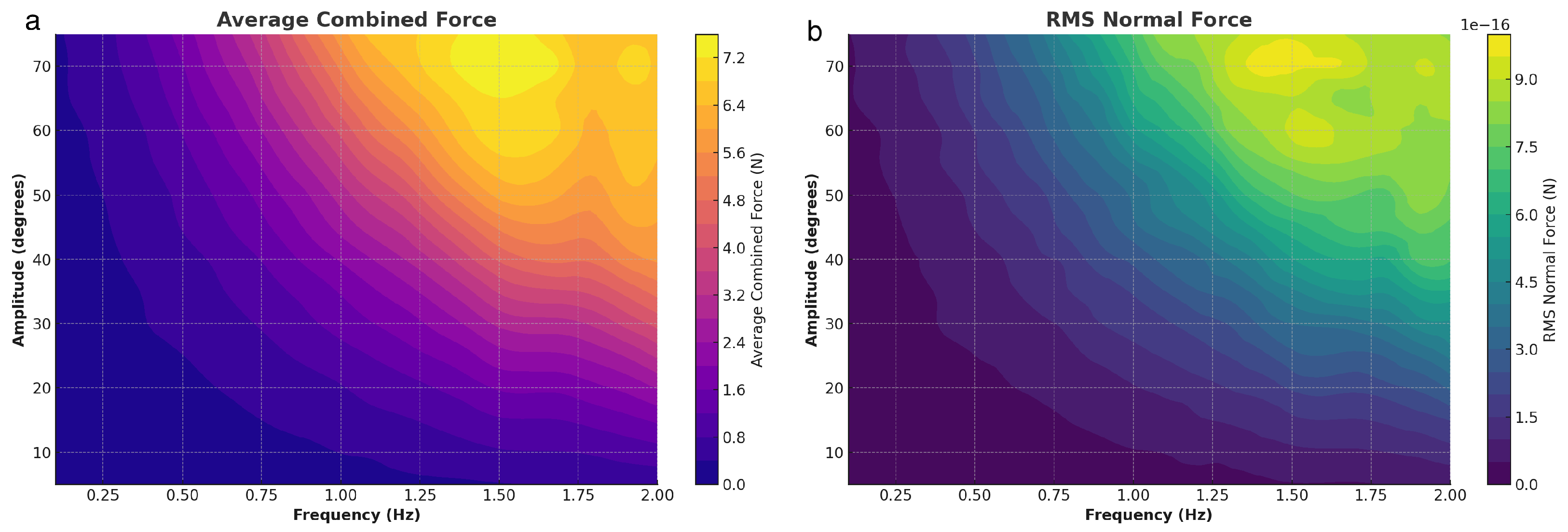
2.4. Thrust Generation by the Pectoral Fin
2.5. Vortex Dynamics of Pectoral Fin Deceleration Under Constant Flow: Deceleration Rate Effects
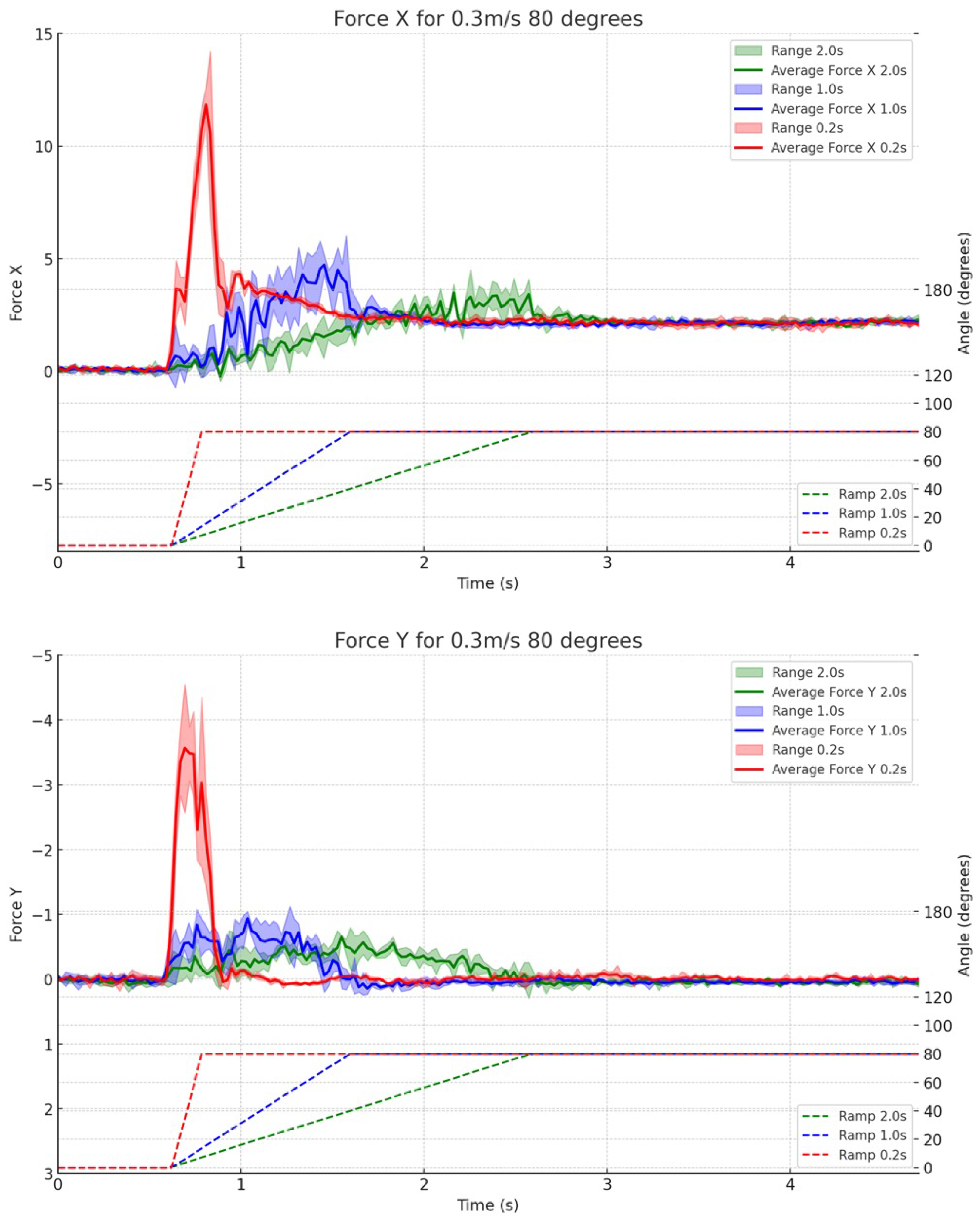
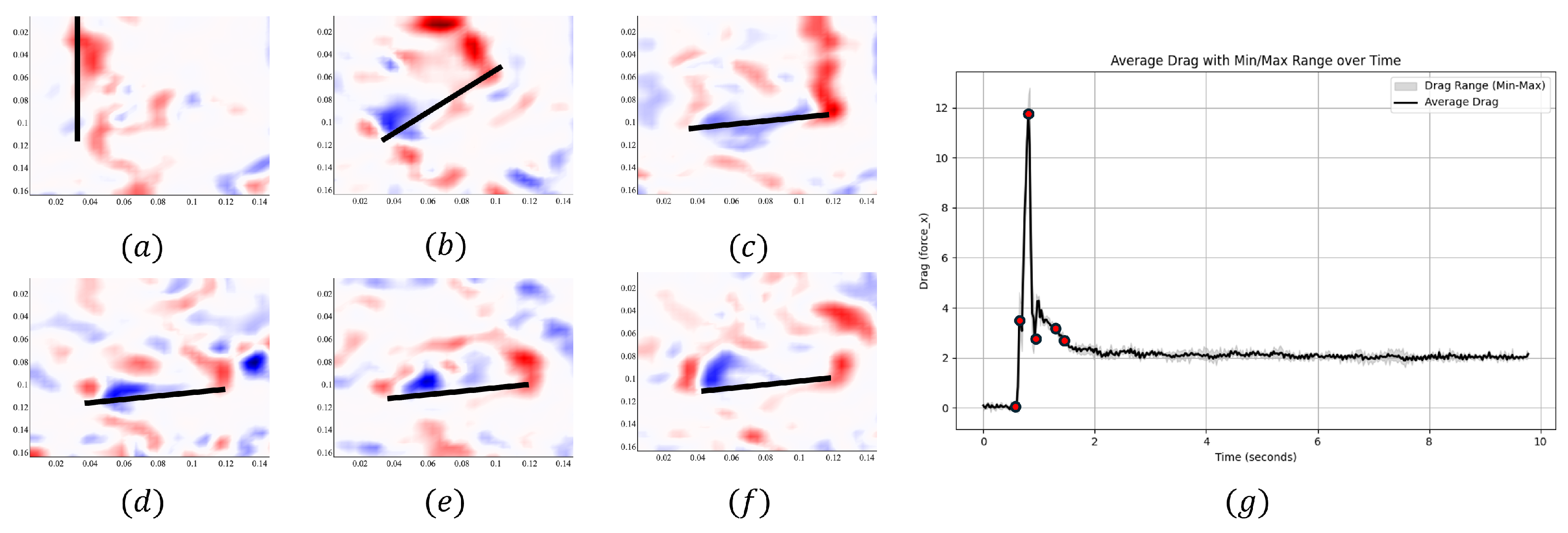
2.5.1. Rapid Deceleration
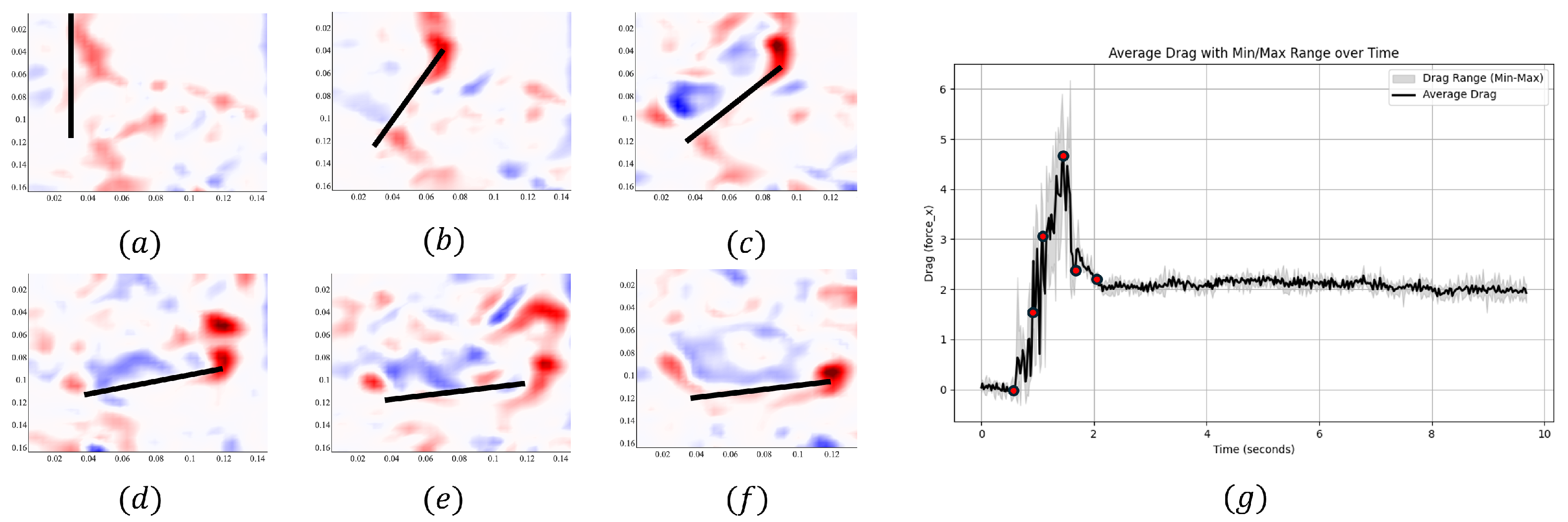
2.5.2. Moderate Deceleration
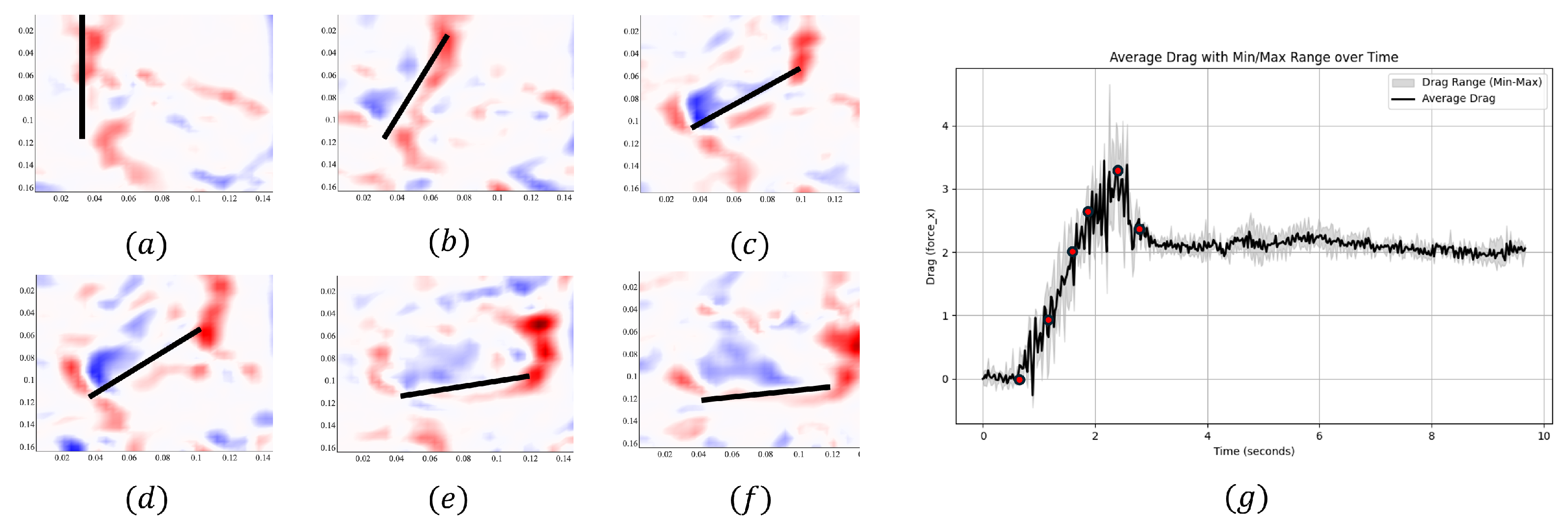
2.5.3. Slow Deceleration
2.5.4. Comprehensive Comparison of Deceleration Groups
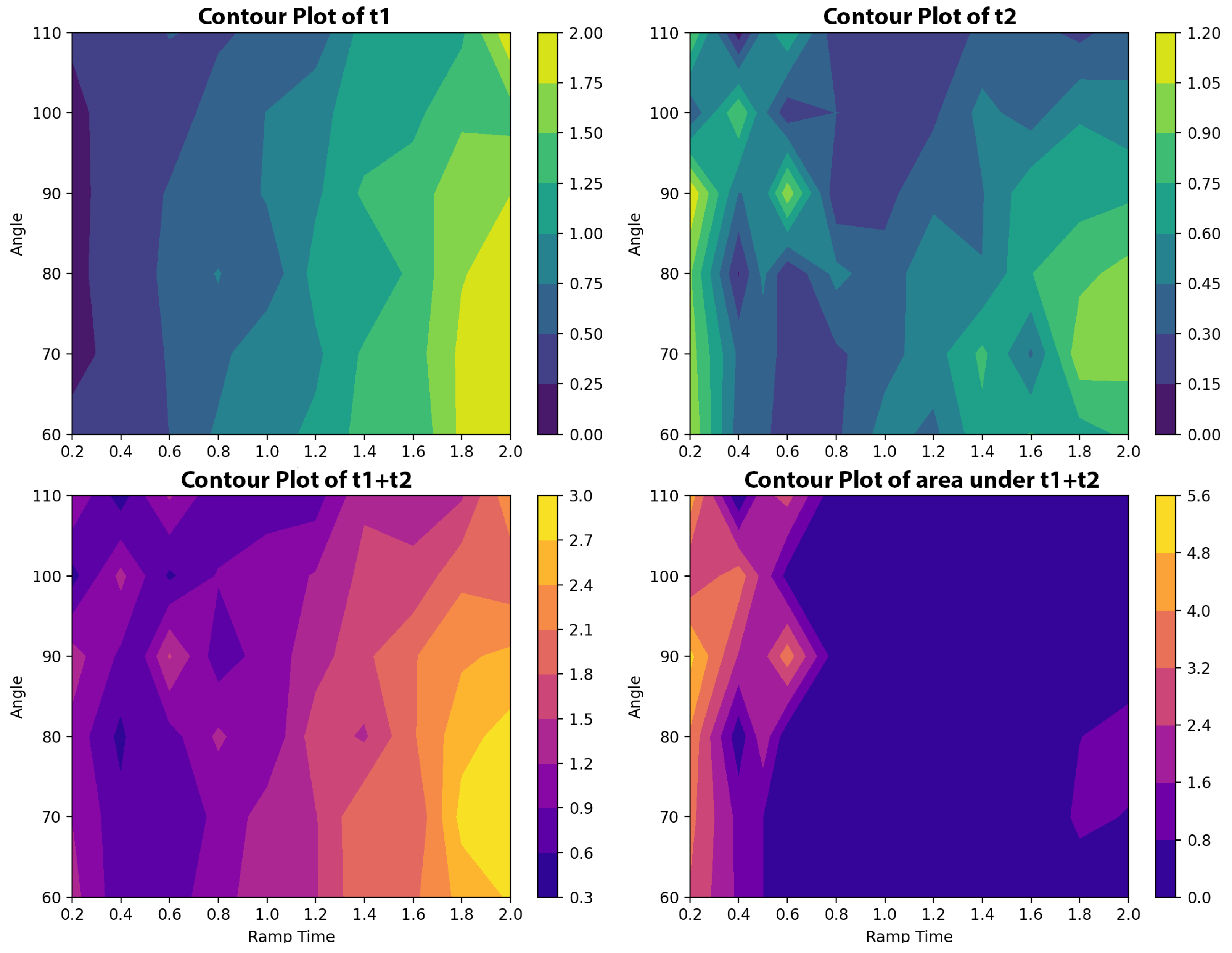
2.5.5. Impact of Deceleration Time on Vortex Dynamics and Force Variation
Vortex Intensity and Detachment Rate
Downstream Wake Patterns
2.5.6. Summary
- Rapid Deceleration (0.2 s): This condition induces intense and chaotic vortex shedding, resulting in high drag-force peaks and turbulent wake patterns. The sudden detachment of the fin causes significant energy dissipation and unsteady flow dynamics.
- Moderate Deceleration (1.0 s): Vortex formation and detachment are smoother, leading to reduced turbulence and more stable wake structures. The drag force peaks are lower and the wake evolves into periodic patterns downstream.
- Slow Deceleration (2.0 s): This condition minimizes vortex intensity and turbulence, leading to highly periodic and symmetric wake patterns. The drag force remains stable, indicating efficient energy transfer from the fin to the surrounding fluid.
3. Results
3.1. Deployment of Optimal Control Parameters of a Robotic Fish
3.2. Hydrodynamic Performance of the Pectoral Fin Mechanism
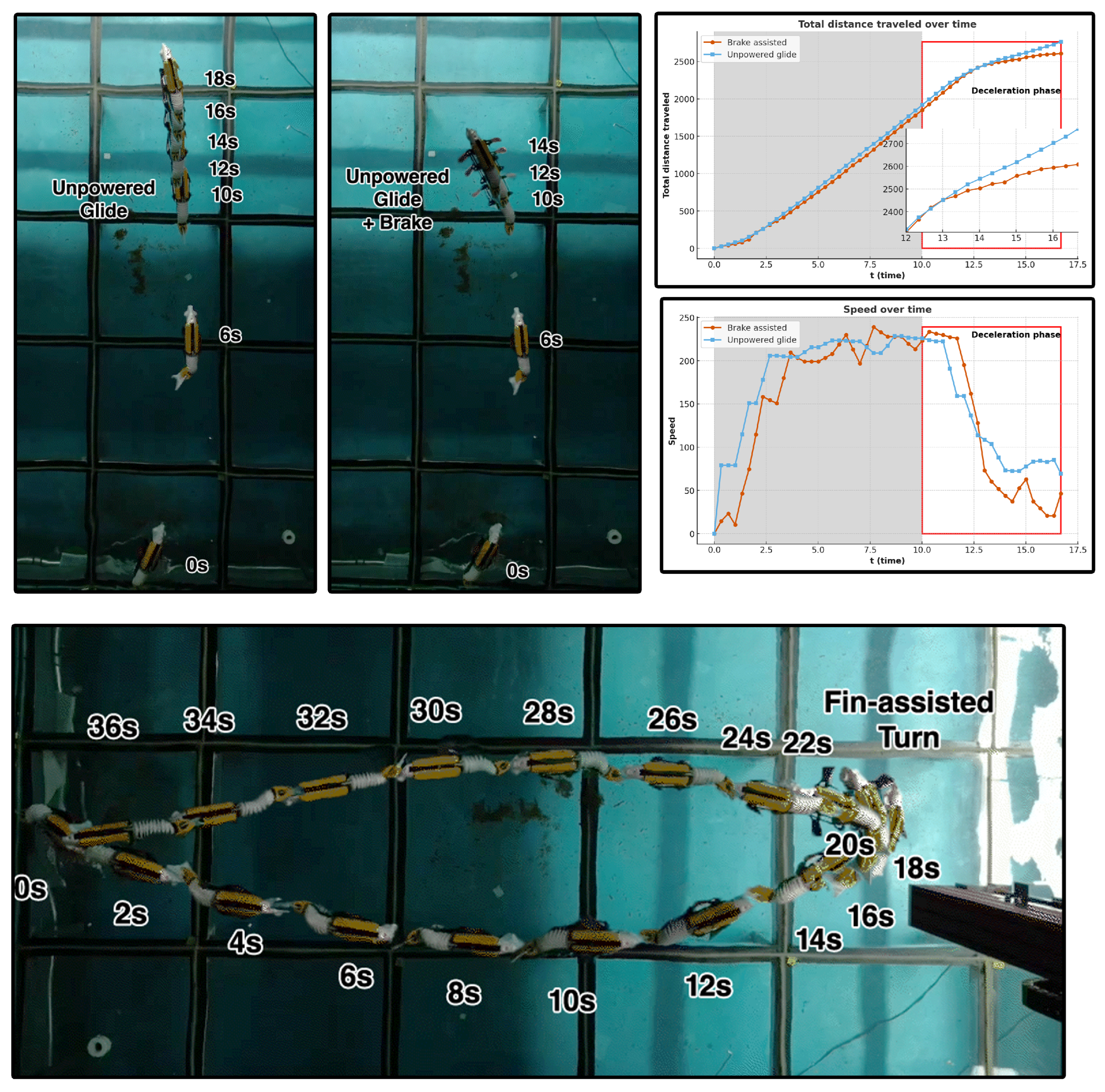
3.3. Free Swimming Performance
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wilga, C.D.; Lauder, G.V. Locomotion in sturgeon: Function of the pectoral fins. J. Exp. Biol. 1999, 202, 2413–2432. [Google Scholar] [CrossRef]
- Liao, J.C. A review of fish swimming mechanics and behaviour in altered flows. Philos. Trans. R. Soc. Biol. Sci. 2007, 362, 1973–1993. [Google Scholar] [CrossRef]
- Videler, J.J. Fish Swimming; Fish & Fisheries Series; Springer: Berlin/Heidelberg, Germany, 1993; pp. 1–121. [Google Scholar]
- Green, A.L.; Maypa, A.P.; Almany, G.R.; Rhodes, K.L.; Weeks, R.; Abesamis, R.A.; Gleason, M.G.; Mumby, P.J.; White, A.T. Larval dispersal and movement patterns of coral reef fishes, and implications for marine reserve network design. Biol. Rev. 2015, 90, 1215–1247. [Google Scholar] [CrossRef] [PubMed]
- Coates, M.I. The evolution of paired fins. Theory Biosci. 2003, 122, 266–287. [Google Scholar] [CrossRef]
- Diogo, R.; Chardon, M. On the comparative anatomy of the Teleostei pectoral and pelvic girdles and associated muscles. Cybium 2007, 25, 337–349. [Google Scholar] [CrossRef]
- Thorsen, D.H.; Westneat, M.W. Diversity of pectoral fin structure and function in fishes with labriform propulsion. J. Morphol. 2005, 263, 1155–1167. [Google Scholar] [CrossRef] [PubMed]
- Kato, N. Control performance in the horizontal plane of a fish robot with mechanical pectoral fins. IEEE J. Ocean. Eng. 2000, 25, 121–129. [Google Scholar] [CrossRef]
- Sitorus, P.; Nazaruddin, Y.; Leksono, E.; Budiyono, A. Design and implementation of paired pectoral fins locomotion of labriform fish applied to a fish robot. J. Bionic Eng. 2009, 6, 37–45. [Google Scholar] [CrossRef]
- Tangorra, J.L.; Lauder, G.V.; Hunter, I.W.; Mittal, R.; Madden, P.G.; Bozkurttas, M. The effect of fin ray flexural rigidity on the propulsive forces generated by a biorobotic fish pectoral fin. J. Exp. Biol. 2010, 213, 4043–4054. [Google Scholar] [CrossRef]
- Dong, H.; Bozkurttas, M.; Mittal, R.; Madden, P.; Lauder, G.V. Computational modeling and analysis of the hydrodynamics of a highly deformable fish pectoral fin. J. Fluid Mech. 2010, 645, 281–312. [Google Scholar] [CrossRef]
- Lauder, G.V.; Madden, P.G. Morphology and experimental hydrodynamics of fish fin control surfaces. IEEE J. Ocean. Eng. 2004, 29, 556–571. [Google Scholar] [CrossRef]
- Westneat, M.W.; Lenon, W.; Wainwright, P.C.; Ashley-Ross, M. Structure, function, and evolution of seahorse tailgrasping appendages. Proc. R. Soc. Lond. Biol. Sci. 2004, 29, 11–17. [Google Scholar] [CrossRef]
- Hove, J.; O’Bryan, L.; Gordon, M.; Webb, P.; Weihs, D. Boxfishes (Teleostei: Ostraciidae) as a model system for fishes swimming with many fins: Kinematics. J. Exp. Biol. 2001, 204, 1459–1471. [Google Scholar] [CrossRef] [PubMed]
- Gibb, A.; Jayne, B.; Lauder, G. Kinematics of pectoral fin locomotion in the bluegill sunfish Lepomis macrochirus. J. Exp. Biol. 1994, 189, 379–387. [Google Scholar] [CrossRef]
- Chu, W.S.; Lee, K.; Song, S.H.; Han, M.W.; Lee, J.Y.; Kim, H.S.; Kim, M.S.; Park, Y.J.; Cho, K.J.; Ahn, S.H. A review of biomimetic underwater robots using smart materials. Smart Mater. Struct. 2012, 13, 053001. [Google Scholar]
- Lauder, G.V.; Anderson, E.J.; Tangorra, J.; Madden, P.G. Fish biorobotics: Kinematics and hydrodynamics of self-propulsion. J. Exp. Biol. 2007, 210, 2767–2780. [Google Scholar] [CrossRef]
- Raj, A.; Thakur, A. Fish-inspired robots: Design, sensing, actuation, and autonomy—A review of research. Bioinspir. Biomim. 2016, 11, 031001. [Google Scholar] [CrossRef]
- Ryuh, Y.; Yang, G.; Liu, J.; Hu, H. School of swimming robots: Modeling, design, and motion coordination. J. Mech. Sci. Technol. 2015, 12, 4265–4273. [Google Scholar] [CrossRef]
- Shin, D.; Tanaka, N.; Kim, H.; Kang, B.; McIntosh, J. Fish robotics: Biomimetic approaches for aquatic propulsion. Mar. Technol. Soc. J. 2007, 1, 4–17. [Google Scholar] [CrossRef]
- Tokekar, P.; Branson, E.; Vander Hook, J.; Isler, V. Tracking aquatic invaders: Autonomous robots for monitoring invasive fish. IEEE Robot. Autom. Mag. 2013, 20, 33–41. [Google Scholar] [CrossRef]
- Xie, H.; Shen, J.; Fan, Y.; Pan, X.; Ni, Z.; Jiao, Y. Designs of the biomimetic robotic fishes performing Body and/or Caudal Fin (BCF) swimming locomotion: A review. Appl. Sci. 2021, 102, 1–22. [Google Scholar] [CrossRef]
- Yuh, J.; Marani, G.; Blidberg, D.R. Underwater robotics. Annu. Rev. Control. Robot. Auton. Syst. 2001, 15, 245–268. [Google Scholar] [CrossRef]
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean. Eng. 2018, 163, 433–450. [Google Scholar] [CrossRef]
- Barbera, G.; Currò, D.; Sutera, A. Attitude control for a pectoral fin actuated bio-inspired robotic fish. Control Eng. Pract. 2011, 809–818. [Google Scholar] [CrossRef]
- Behbahani, S.B.; Tan, X. Bio-inspired flexible joints with passive feathering for robotic fish pectoral fins. Bioinspir. Biomim. 2016, 11, 036009. [Google Scholar] [CrossRef]
- Higham, T.E.; Malas, B.; Jayne, B.C.; Lauder, G.V. Constraints on starting and stopping: Behavior compensates for reduced pectoral fin area during braking of the bluegill sunfish Lepomis macrochirus. J. Exp. Biol. 2005, 208, 4735–4746. [Google Scholar] [CrossRef]
- Gerstner, C.L. Maneuverability of four species of coral-reef fish that differ in body and pectoral-fin morphology. Can. J. Zool. 1999, 77, 1102–1110. [Google Scholar] [CrossRef]
- Luong, J.; Glick, P.; Arias, A.; Nagpal, R.; Morin, S. Eversion and retraction of a soft robot towards the exploration of coral reefs. Adv. Robot. 2019, 1122–1134. [Google Scholar] [CrossRef]
- Bingham, B.; Foley, B.; Singh, H.; Camilli, R.; Delaporta, K.; Eustice, R.; Mallios, A.; Mindell, D.; Roman, C.; Sakellariou, D. Robotic tools for deep water archaeology: Surveying an ancient shipwreck with an autonomous underwater vehicle. J. Field Robot. 2010, 27, 223–237. [Google Scholar] [CrossRef]
- Chen, L.; Bi, S.; Cai, Y.; Cao, Y.; Pan, G. Design and experimental research on a bionic robot fish with tri-dimensional soft pectoral fins inspired by cownose ray. J. Mar. Sci. Eng. 2022, 10, 537. [Google Scholar] [CrossRef]
- Szymak, P.; Piskur, P.; Kot, R.; Naus, K.; Powarzyński, D. Biomimetic propulsion system efficiency for unmanned underwater vehicle. Sci. Rep. 2025, 15, 11086. [Google Scholar] [CrossRef]
- Marino, L. Experimental analysis of UAV propeller noise. In Proceedings of the 16th AIAA/CEAS Aeroacoustics Conference, Stockholm, Sweden, 7–9 June 2010; p. 3854. [Google Scholar]
- Maertens, A.; Triantafyllou, M.S.; Yue, D.K. Efficiency of fish propulsion. Bioinspir. Biomim. 2015, 10, 046013. [Google Scholar] [CrossRef] [PubMed]
- Fish, F.E. Advantages of natural propulsive systems. Mar. Technol. Soc. J. 2013, 47, 37–44. [Google Scholar] [CrossRef]
- Zhong, Y.; Yang, W.; Wang, X.; Song, J.; Guo, Y.; Du, J. Design and experimental results of a compliant oscillation propulsion mechanism on a self-propelling robotic fish. Appl. Phys. A 2013, 78, 879–885. [Google Scholar]
- Palmisano, J.S.; Geder, J.D.; Ramamurti, R.; Sandberg, W.C.; Ratna, B. Robotic pectoral fin thrust vectoring using weighted gait combinations. Appl. Bionics Biomech. 2012, 9, 501–512. [Google Scholar] [CrossRef]
- Hale, M.E.; Day, R.D.; Thorsen, D.H.; Westneat, M.W. Pectoral fin coordination and gait transitions in steadily swimming juvenile reef fishes. J. Exp. Biol. 2006, 209, 3708–3718. [Google Scholar] [CrossRef]
- Fish, F.E.; Shannahan, L.D. The role of the pectoral fins in body trim of sharks. J. Fish Biol. 2000, 56, 1062–1073. [Google Scholar] [CrossRef]
- Qiu, H.; Chen, L.; Ma, X.; Bi, S.; Wang, B.; Li, T. Analysis of Heading Stability due to Interactions between Pectoral and Caudal Fins in Robotic Boxfish Locomotion. J. Bionic Eng. 2023, 20, 390–405. [Google Scholar] [CrossRef]
- Harris, J.E. The role of the fins in the equilibrium of the swimming fish: II. The role of the pelvic fins. J. Exp. Biol. 1938, 15, 32–47. [Google Scholar] [CrossRef]
- Blevins, E.L.; Lauder, G.V. Rajiform locomotion: Three-dimensional kinematics of the pectoral fin surface during swimming in the freshwater stingray Potamotrygon orbignyi. J. Exp. Biol. 2012, 215, 3231–3241. [Google Scholar] [CrossRef]
- Blake, R.W. Fish functional design and swimming performance. J. Fish Biol. 2004, 65, 1193–1222. [Google Scholar] [CrossRef]
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252. [Google Scholar] [CrossRef]
- Webb, P.W. The biology of fish swimming. Mech. Physiol. Anim. Swim. 1994, 45–62. [Google Scholar] [CrossRef]
- Yen, W.K.; Sierra, D.M.; Guo, J. Controlling a robotic fish to swim along a wall using hydrodynamic pressure feedback. IEEE J. Ocean. Eng. 2018, 43, 369–380. [Google Scholar] [CrossRef]
- Liu, G.; Wang, A.; Wang, X.; Liu, P. A Review of Artificial Lateral Line in Sensor Fabrication and Bionic Applications for Robot Fish. Appl. Bionics Biomech. 2016, 2016, 4732703. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, C.; Fan, R.; Xie, G. Artificial lateral line based local sensing between two adjacent robotic fish. Bioinspir. Biomim. 2017, 13, 016002. [Google Scholar] [CrossRef]
- Sun, B.; Li, W.; Wang, Z.; Zhu, Y.; He, Q.; Guan, X.; Dai, G.; Yuan, D.; Li, A.; Cui, W. Recent progress in modeling and control of bio-inspired fish robots. J. Mar. Sci. Eng. 2022, 10, 773. [Google Scholar] [CrossRef]
- Ren, Q.; Xu, J.; Li, X. A data-driven motion control approach for a robotic fish. J. Bionic Eng. 2015, 12, 382–394. [Google Scholar] [CrossRef]
- Liu, J.; Hu, H.; Gu, D. A hybrid control architecture for autonomous robotic fish. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 312–317. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Optimal Value | Performance Improvement |
|---|---|---|
| Fin angle for max drag | 80° | 1.68 N additional drag per fin |
| Fin angle for max lift | 135° | 0.42 N additional lift per fin |
| Parameters for max thrust | 70° at 1.5 Hz | 7.2 N of thrust per fin |
| Deploy time (braking) | 0.2 s | 50% less stopping distance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Q.; Zhu, Y.; Li, W.; Cui, W.; Fan, D. Pectoral Fin-Assisted Braking and Agile Turning: A Biomimetic Approach to Improve Underwater Robot Maneuverability. J. Mar. Sci. Eng. 2025, 13, 1295. https://doi.org/10.3390/jmse13071295
He Q, Zhu Y, Li W, Cui W, Fan D. Pectoral Fin-Assisted Braking and Agile Turning: A Biomimetic Approach to Improve Underwater Robot Maneuverability. Journal of Marine Science and Engineering. 2025; 13(7):1295. https://doi.org/10.3390/jmse13071295
Chicago/Turabian StyleHe, Qu, Yunpeng Zhu, Weikun Li, Weicheng Cui, and Dixia Fan. 2025. "Pectoral Fin-Assisted Braking and Agile Turning: A Biomimetic Approach to Improve Underwater Robot Maneuverability" Journal of Marine Science and Engineering 13, no. 7: 1295. https://doi.org/10.3390/jmse13071295
APA StyleHe, Q., Zhu, Y., Li, W., Cui, W., & Fan, D. (2025). Pectoral Fin-Assisted Braking and Agile Turning: A Biomimetic Approach to Improve Underwater Robot Maneuverability. Journal of Marine Science and Engineering, 13(7), 1295. https://doi.org/10.3390/jmse13071295