
Vessel Safety Navigation Under the Influence of Antarctic Sea Ice



Abstract
1. Introduction
2. Materials and Methods
2.1. International Context of Polar Navigation Routes
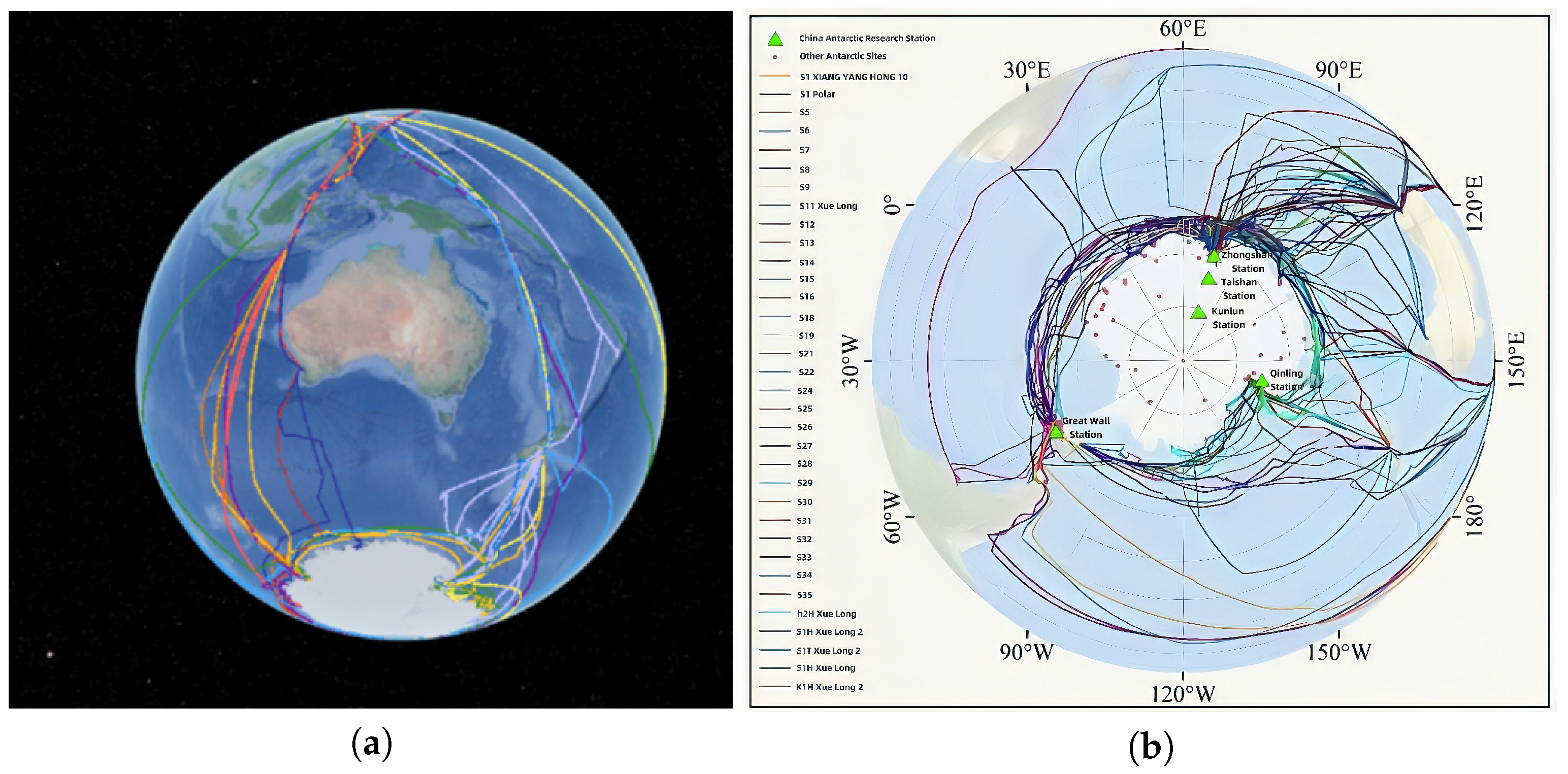
2.1.1. Distribution of China’s Polar Routes
2.1.2. Characteristics of Polar Routes
2.2. Risk Prediction in Ice Navigation via Satellite Remote Sensing
2.2.1. Evolution of Polar Satellite Remote Sensing
2.2.2. Application of Ice Navigation Awareness Systems
2.2.3. Risk Assessment for Ice Navigation Using Remote Sensing Data
2.2.4. Satellite Remote Sensing Data Processing Methodology
2.2.5. Uncertainty Analysis and Error Propagation in RIO Formula*
2.3. Icebreaker Navigation Patterns Derived from Satellite Remote Sensing Data
2.3.1. Data Derivation
2.3.2. Vessel Characteristics Under Icebreaker Escort
3. Results
3.1. Polar Expedition Route Analysis
3.2. Ice Navigation Risk Prediction via Satellite Remote Sensing
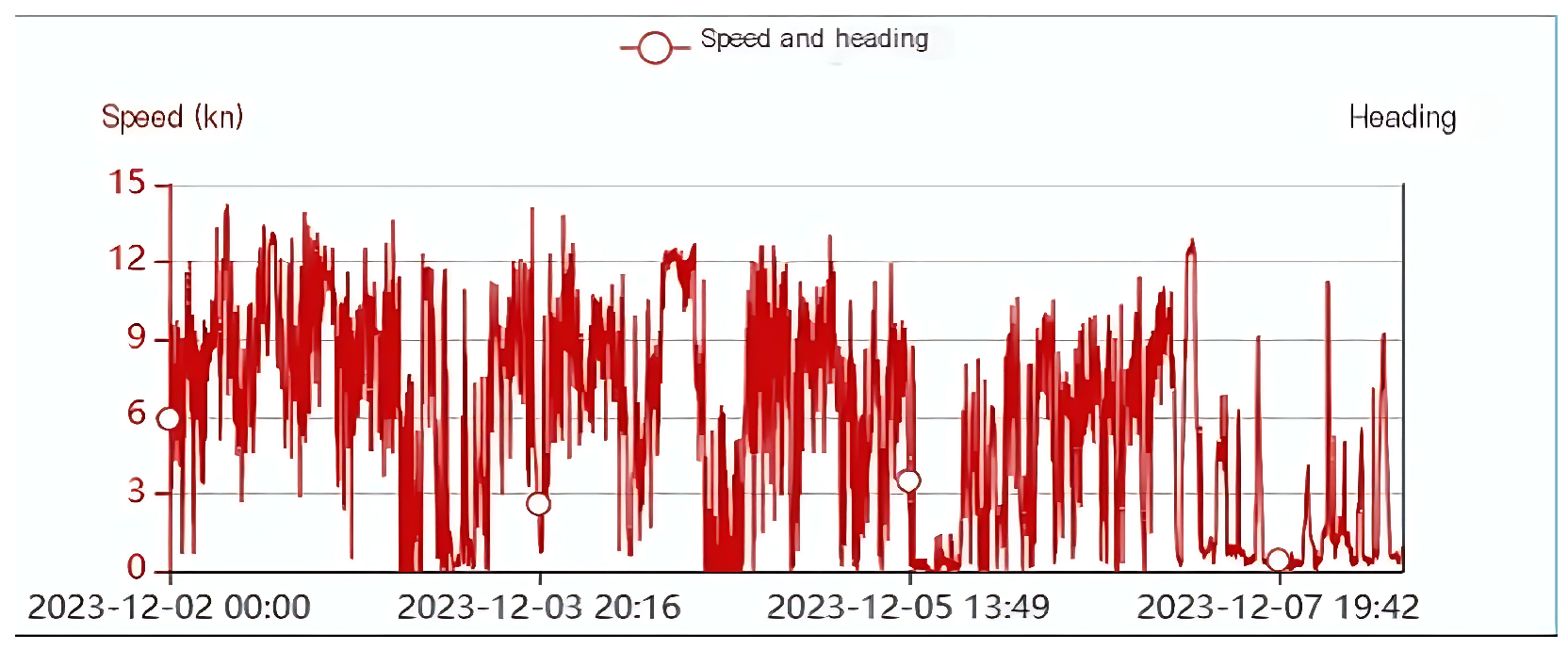
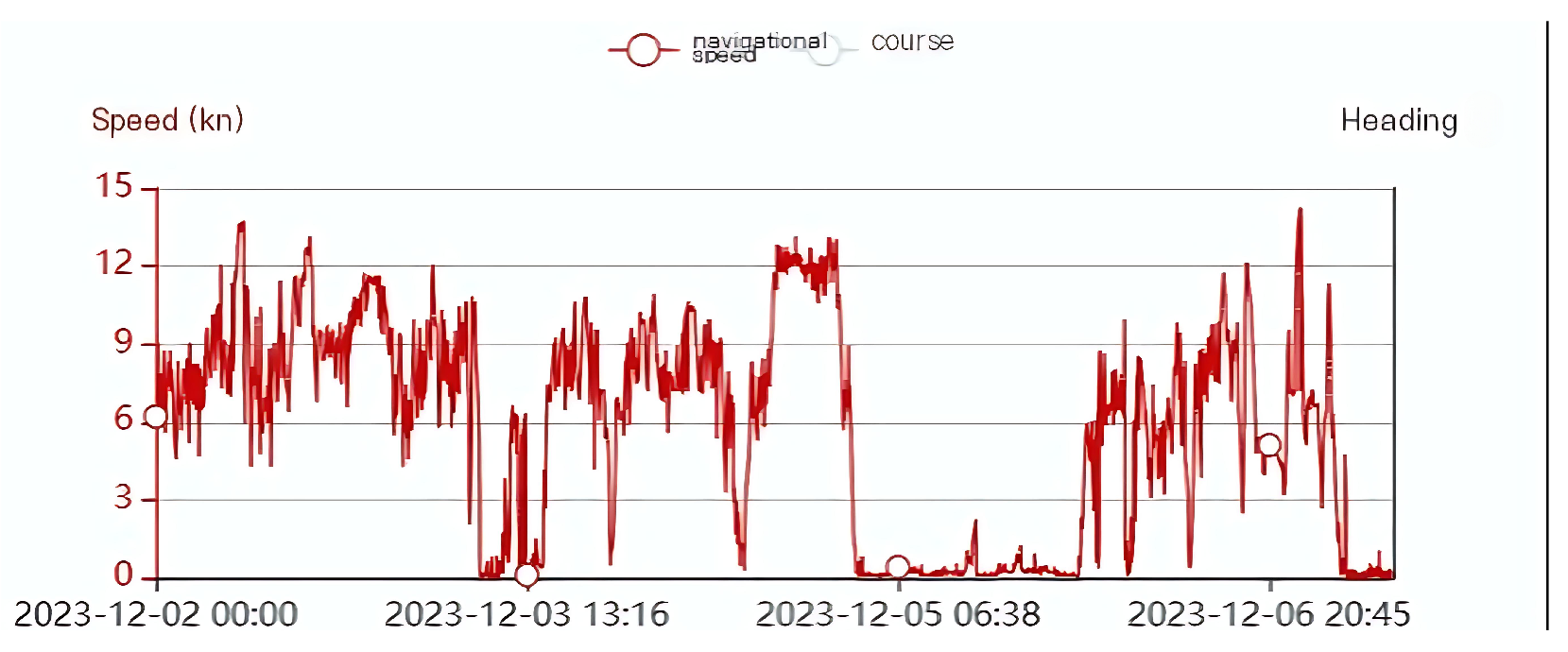
3.3. Icebreaker Escort Dynamics
3.4. Satellite Remote Sensing Limitations
4. Discussion
4.1. Integration of Satellite Remote Sensing for Ice Navigation
4.2. Risk Assessment Frameworks and Operational Adaptations
4.3. Discussion on the Desirability of This Model in Extreme Cases
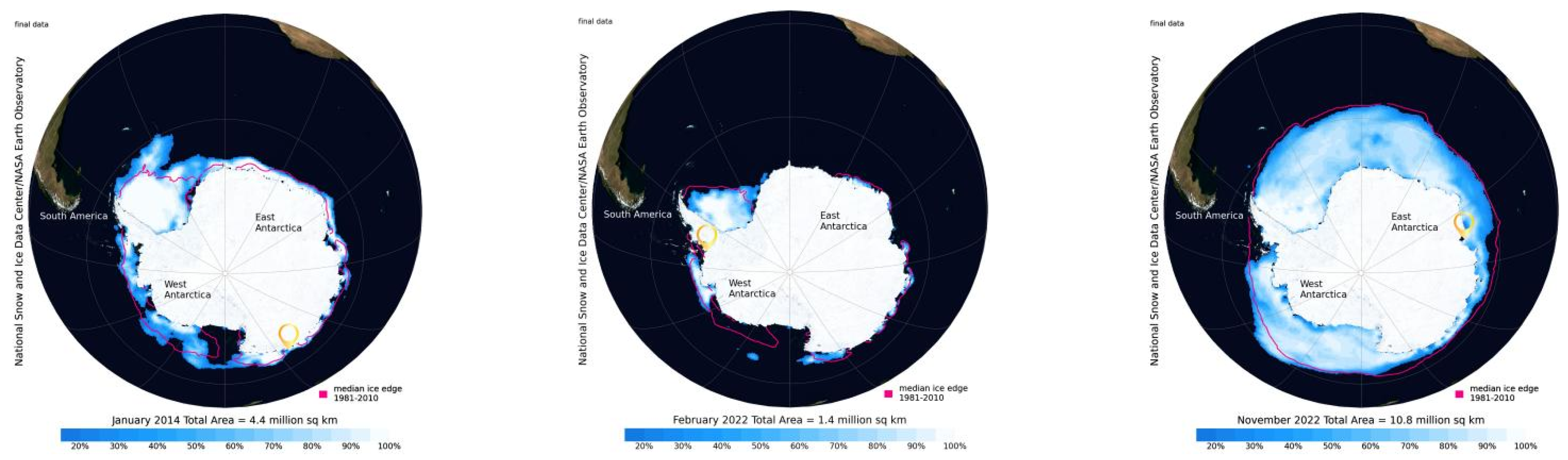
4.4. Climate-Driven Changes and Navigational Implications
4.5. Icebreaker Escort Strategies and Safety Protocols
4.6. Policy and Technological Gaps
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rodriguez-Alvarez, N.; Holt, B.; Jaruwatanadilok, S.; Podest, E.; Cavanaugh, K.C. An Arctic sea ice multi-step classification based on GNSS-R data from the TDS-1 mission. Remote Sens. Environ. 2019, 230, 111202. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Spaceborne GNSS-R Sea Ice Detection Using Delay-Doppler Maps: First Results From the U.K. TechDemoSat-1 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4795–4801. [Google Scholar] [CrossRef]
- Gaidai, O.; He, S.; Sheng, J.; Zhu, Y.; Yakimov, V.; Elsayed, A.; Elkelity, A. Safety assessment for UIKKU tanker by multivariate Gaidai reliability method, utilizing self-deconvolution extrapolation scheme. J. Ocean. Eng. Mar. Energy 2025. [Google Scholar] [CrossRef]
- Kennicutt, M.C.; Chown, S.L.; Cassano, J.J.; Liggett, D.; Massom, R.; Peck, L.S.; Rintoul, S.R.; Storey, J.W.V.; Vaughan, D.G.; Wilson, T.J.; et al. Polar research: Six priorities for Antarctic science. Nature 2014, 512, 23–25. [Google Scholar] [CrossRef]
- Karatekin, F.; Uzun, F.R.; Ager, B.J.; Convey, P.; Hughes, K.A. The emerging contribution of Türkiye to Antarctic science and policy. Antarct. Sci. 2023, 35, 299–315. [Google Scholar] [CrossRef]
- Pertierra, L.R.; Hughes, K.A.; Vega, G.C.; Olalla-Tárraga, M.Á. Correction: High Resolution Spatial Mapping of Human Footprint across Antarctica and Its Implications for the Strategic Conservation of Avifauna. PLoS ONE 2017, 12, e0168280. [Google Scholar] [CrossRef]
- Tin, T.; Fleming, Z.; Hughes, K.; Ainley, D.; Convey, P.; Moreno, C.; Pfeiffer, S.; Scott, J.; Snape, I. Impacts of local human activities on the Antarctic environment. Antarct. Sci. 2008, 21, 3–33. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, J.; Zang, J.; Wang, Y.; Sun, L. Reforming China’s polar science and technology system. Interdiscip. Sci. Rev. 2019, 44, 387–401. [Google Scholar] [CrossRef]
- Teleti, P.R.; Luis, A.J. Sea Ice Observations in Polar Regions: Evolution of Technologies in Remote Sensing. Int. J. Geosci. 2013, 4, 1031–1050. [Google Scholar] [CrossRef]
- Remote Sensing of Sea Ice in the Northern Sea Route. In Springer Praxis Books; Springer Science & Business Media: Berlin, Germany, 2006. [CrossRef]
- Wang, X.; Cheng, X.; Hui, F.; Cheng, C.; Fok, H.; Liu, Y. Xuelong Navigation in Fast Ice Near the Zhongshan Station, Antarctica. Mar. Technol. Soc. J. 2014, 48, 84–91. [Google Scholar] [CrossRef]
- Duffour, C.; Lagouarde, J.P.; Olioso, A.; Demarty, J.; Roujean, J.L. Driving factors of the directional variability of thermal infrared signal in temperate regions. Remote Sens. Environ. 2016, 177, 248–264. [Google Scholar] [CrossRef]
- Wang, Z.; Turner, J.; Sun, B.; Li, B.; Liu, C. Cyclone-induced rapid creation of extreme Antarctic sea ice conditions. Sci. Rep. 2014, 4, 5317. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhang, Z.; Wang, X.; Vihma, T.; Zhou, M.; Yu, L.; Uotila, P.; Sein, D.V. Impacts of strong wind events on sea ice and water mass properties in Antarctic coastal polynyas. Clim. Dyn. 2021, 57, 3505–3528. [Google Scholar] [CrossRef]
- Alkama, R.; Koffi, E.N.; Vavrus, S.J.; Diehl, T.; Francis, J.A.; Stroeve, J.; Forzieri, G.; Vihma, T.; Cescatti, A. Wind amplifies the polar sea ice retreat. Environ. Res. Lett. 2020, 15, 124022. [Google Scholar] [CrossRef]
- Li, B.; Gong, J.; Zhao, X.; Cheng, X. Research on ship navigation strategy in dynamic sea ice environments based on flexibility velocity obstacles algorithm. Ocean. Eng. 2024, 311, 118843. [Google Scholar] [CrossRef]
- Ershov, A.A.; Boiarinov, A.M.; Gakkel, A.A. Theoretical foundations of freeing ships from heavy ice conditions. Vestn. Gos. Univ. Morskogo Rechn. Flot. Im. Admirala S. O. Makarova 2023, 15, 200–214. [Google Scholar] [CrossRef]
- Suominen, M.; Kõrgesaar, M.; Taylor, R.; Bergström, M. Probabilistic analysis of operational ice damage for Polar class vessels using full-scale data. Struct. Saf. 2024, 107, 102423. [Google Scholar] [CrossRef]
- Panchi, N.; Kim, E.; Xu, S. Do Vessels Remain Within Their Operational Limitations in Ice? Analyzing the Risks of Vessels Operating in the Kara Sea Region Using POLARIS. In Volume 7: Polar and Arctic Sciences and Technology; American Society of Mechanical Engineers: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- An, L.; Ma, L.; Wang, H.; Zhang, H.Y.; Li, Z.H. Research on navigation risk of the Arctic Northeast Passage based on POLARIS. J. Navig. 2022, 75, 455–475. [Google Scholar] [CrossRef]
- Chen, X.; Zhao, J.; Zhao, Y.; Liu, X.; Ma, L.; Liu, M.; Shao, Z.; Xiao, J.; Chen, Z.; Zhang, S.; et al. Risk assessment of ice-class-based navigation in Arctic: A case study in the Vilkitsky Strait. J. Phys. Conf. Ser. 2024, 2718, 12040. [Google Scholar] [CrossRef]
- Xu, J.; Xu, S.; Ma, L.; Qian, S.; Li, X. Research on Polar Operational Limit Assessment Risk Indexing System for Ships Operating in Seasonal Sea-Ice Covered Waters. J. Mar. Sci. Eng. 2024, 12, 827. [Google Scholar] [CrossRef]
- Joshi, P.; Srigyan, M.; Oza, S.; Ray, Y.; Beg, J. Bringing SAR capability to a safer ice navigation during Indian Antarctic Expedition in near real-time mode. Polar Sci. 2022, 34, 100900. [Google Scholar] [CrossRef]
- Shu, Y.; Cui, H.; Song, L.; Gan, L.; Xu, S.; Wu, J.; Zheng, C. Influence of sea ice on ship routes and speed along the Arctic Northeast Passage. Ocean. Coast. Manag. 2024, 256, 107320. [Google Scholar] [CrossRef]
- Huang, Y.; Sun, C.; Sun, J.; Song, Z. Route Planning of a Polar Cruise Ship Based on the Experimental Prediction of Propulsion Performance in Ice. J. Mar. Sci. Eng. 2023, 11, 1655. [Google Scholar] [CrossRef]
- Li, Z.; Ringsberg, J.W.; Rita, F. A voyage planning tool for ships sailing between Europe and Asia via the Arctic. Ships Offshore Struct. 2020, 15 (Suppl. 1), S10–S19. [Google Scholar] [CrossRef]
- Zongxuan, X.; He, X.; Shengzheng, W.; Bing, H.; Zhongdai, W.; Wei, L. Calculation of Sea Ice Risk and Safety Assessment of Shipping Routes in the Arctic Route. Navig. China 2023, 46, 36–41+58. [Google Scholar]
- Zhang, W.; Xiao, Y.; Liu, C.; Zhang, M.; Wang, L.; Feng, L. A kinematic model for collaborative icebreaker convoy operations in ice-covered waters. Ocean. Eng. 2024, 304, 117870. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Fu, S.; Yan, X.; Goncharov, V. Safety distance modeling for ship escort operations in Arctic ice-covered waters. Ocean. Eng. 2017, 146, 202–216. [Google Scholar] [CrossRef]
- Park, Y.S.; Ji, S.W.; Lee, Y.S.; Jung, C.H.; Jeong, J.A.; Jung, M. A Study on the Minimum Safe Distance Under the Low Speed Sailing of T.S. HANBADA. J. Navig. Port Res. 2005, 29, 833–838. [Google Scholar] [CrossRef]
- Sibul, G.; Yang, P.; Muravev, D.; Jin, J.G.; Kong, L. Revealing the true navigability of the Northern Sea Route from ice conditions and weather observations. Marit. Policy Manag. 2022, 50, 924–940. [Google Scholar] [CrossRef]
- Canada, T. Arctic Ice Regime Shipping System—Pictorial Guide. 2018. Available online: https://tc.canada.ca/en/marine-transportation/marine-safety/arctic-ice-regime-shipping-system-pictorial-guide#ice-multipliers (accessed on 10 June 2025).
- Near-Real-Time SSM/I-SSMIS EASE-Grid Daily Global Ice Concentration and Snow Extent, Version 5 | National Snow and Ice Data Center — nsidc.org. Available online: https://nsidc.org/data/nise/versions/5 (accessed on 24 May 2025).
- Meier, W.N.; Khalsa, S.J.S.; Savoie, M.H. Intersensor Calibration Between F-13 SSM/I and F-17 SSMIS Near-Real-Time Sea Ice Estimates. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3343–3349. [Google Scholar] [CrossRef]
- Jeon, S.; Kim, Y. Fatigue damage estimation of icebreaker ARAON colliding with level ice. Ocean. Eng. 2022, 257, 111707. [Google Scholar] [CrossRef]
- Müller, M.; Knol-Kauffman, M.; Jeuring, J.; Palerme, C. Arctic shipping trends during hazardous weather and sea-ice conditions and the Polar Code’s effectiveness. npj Ocean. Sustain. 2023, 2, 12. [Google Scholar] [CrossRef]
- Bailey, E.; Bruce, J.; Derradji-Aouat, A.; Lau, M. An Overview of the Development of Ice Ridge Keel Strengths Test Program. In Proceedings of the OTC Arctic Technology Conference, Houston, TX, USA, 10 February 2014. [Google Scholar] [CrossRef]
- Cox, C.J.; Morris, S.M.; Uttal, T.; Burgener, R.; Hall, E.; Kutchenreiter, M.; McComiskey, A.; Long, C.N.; Thomas, B.D.; Wendell, J. The De-Icing Comparison Experiment (D-ICE): A study of broadband radiometric measurements under icing conditions in the Arctic. Atmos. Meas. Tech. 2021, 14, 1205–1224. [Google Scholar] [CrossRef]
- Duncombe, J. Arctic Shipping Routes Are Feeling the Heat. Eos 2022, 103. [Google Scholar] [CrossRef]
- Bond, J.; Hindley, R.; Kendrick, A.; Kämäräinen, J.; Kuulila, L. Evaluating Risk and Determining Operational Limitations for Ships in Ice. In Proceedings of the OTC Arctic Technology Conference, Houston, TX, USA, 1 November 2018. [Google Scholar] [CrossRef]
- Li, X.; Chen, X.; Wu, B.; Cheng, X.; Ding, M.; Lei, R.; Qi, D.; Sun, Q.; Wang, X.; Zhong, W.; et al. China’s Recent Progresses in Polar Climate Change and Its Interactions with the Global Climate System. Adv. Atmos. Sci. 2023, 40, 1401–1428. [Google Scholar] [CrossRef]
- Ren, Y. Beyond a Tool for Short-term National Interests: China’s Polar Science Diplomacy Revisited. SSRN Electron. J. 2024. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Glacial scale | Ice-free | New ice. | Grey Ice | Grey White Ice | Thin First Year | Medium First Year | Thick First Year | Second Year | Multi-Year | Thick Multi-Year | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1st Stage | 2st Stage | 1st Stage | 2st Stage | |||||||||
| SIT(m) | 0 | (0,0.1] | (0.1,0.15] | (0.15,0.3] | (0.3,0.5] | (0.5,0.7] | (0.7,1.0] | (1.0,1.2] | (1.2,1.7] | (1.7,2.0] | (2.0,2.5] | >2.5 |
| PC1 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 2 | 2 | 2 | 1 | 1 |
| PC2 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 2 | 2 | 1 | 1 | 0 |
| PC3 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 2 | 2 | 1 | 0 | −1 |
| PC4 | 3 | 3 | 3 | 3 | 2 | 2 | 2 | 2 | 1 | 0 | −1 | −2 |
| PC5 | 3 | 3 | 3 | 3 | 2 | 2 | 1 | 1 | 0 | −1 | −2 | −3 |
| PC6 | 3 | 2 | 2 | 2 | 2 | 1 | 1 | 0 | −1 | −2 | −3 | −3 |
| PC7 | 3 | 2 | 2 | 2 | 1 | 1 | 0 | −1 | −2 | −3 | −3 | −3 |
| B1* | 3 | 2 | 2 | 2 | 2 | 1 | 0 | −1 | −2 | −3 | −4 | −4 |
| B1 | 3 | 2 | 2 | 2 | 1 | 0 | −1 | −2 | −3 | −4 | −5 | −5 |
| B2 | 3 | 2 | 2 | 1 | 0 | −1 | −2 | −3 | −4 | −5 | −6 | −6 |
| B3 | 3 | 2 | 1 | 0 | −1 | −2 | −3 | −4 | −5 | −6 | −7 | −8 |
| Types of Ice | Class of Ship | CAC | |||||
|---|---|---|---|---|---|---|---|
| E | D | C | B | A | 4 | 3 | |
| MY Multi-Year Ice | −4 | −4 | −4 | −4 | −4 | −3 | −1 |
| SY Second Year Ice | −4 | −4 | −4 | −4 | −3 | −2 | 1 |
| TFY Thick First Year Ice > 120 cm | −3 | −3 | −3 | −2 | −1 | 1 | 2 |
| MFY Medium First Year Ice 70–120 cm | −2 | −2 | −2 | −1 | 1 | 2 | 2 |
| FY Thin First Year Ice—stage 2 | −1 | −1 | −1 | 1 | 2 | 2 | 2 |
| FY Thin First Year Ice—stage 1 | −1 | −1 | 1 | 1 | 2 | 2 | 2 |
| GW Grey-White Ice 15–30 cm | −1 | 1 | 1 | 1 | 2 | 2 | 2 |
| G Grey Ice | 1 | 2 | 2 | 2 | 2 | 2 | 2 |
| NI Nilas, Ice Rind < 10 cm | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| N New Ice < 10 cm | - | - | - | - | - | - | - |
| Name of Ship | Xue Long 2 | Tian Hui |
|---|---|---|
| Type of vessel | icebreaker | cargo vessel |
| Glacial scale | PC3 | Arc4 |
| Length (m) | 122.5 | 189.99 |
| Breadth (m) | 22 | 28.5 |
| Load capacity (t) | 4950 | 37,130 |
| Gross tonnage (t) | 12,769 | 26,787 |
| Year of construction (years) | 2019 | 2017 |
| Dates | Times | Longitude | Longitudes | Speed/Knot |
|---|---|---|---|---|
| 13 March 2023 | 1000 | S | W | 1.4–2.3 |
| 12 March 2023 | 1204 | S | W | 8.3–9.1 |
| 12 March 2023 | 1400 | S | W | 0.4–0.5 |
| 12 March 2023 | 1500 | S | W | 9.4–10.9 |
| 12 March 2023 | 1530 | S | W | 0.3–0.9 |
| 12 March 2023 | 1600 | S | W | 6.5–7.3 |
| 12 March 2023 | 1630 | S | W | 3.6–5.5 |
| 12 March 2023 | 1700 | S | W | 10.4–10.8 |
| 12 March 2023 | 1800 | S | W | 5.5–7.7 |
| 12 March 2023 | 1902 | S | W | 10.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Yan, D.; Peng, Z.; Xie, M.; Sun, Y. Vessel Safety Navigation Under the Influence of Antarctic Sea Ice. J. Mar. Sci. Eng. 2025, 13, 1267. https://doi.org/10.3390/jmse13071267
Liu W, Yan D, Peng Z, Xie M, Sun Y. Vessel Safety Navigation Under the Influence of Antarctic Sea Ice. Journal of Marine Science and Engineering. 2025; 13(7):1267. https://doi.org/10.3390/jmse13071267
Chicago/Turabian StyleLiu, Weipeng, Daowei Yan, Zekun Peng, Maohong Xie, and Yanglong Sun. 2025. "Vessel Safety Navigation Under the Influence of Antarctic Sea Ice" Journal of Marine Science and Engineering 13, no. 7: 1267. https://doi.org/10.3390/jmse13071267
APA StyleLiu, W., Yan, D., Peng, Z., Xie, M., & Sun, Y. (2025). Vessel Safety Navigation Under the Influence of Antarctic Sea Ice. Journal of Marine Science and Engineering, 13(7), 1267. https://doi.org/10.3390/jmse13071267