6. Numerical Simulation of the Airfoil
Computational analysis serves as a critical enabler in hydrodynamic system optimization, particularly for bio-inspired turbine development. This investigation employs finite volume-based flow resolution techniques combined with metaheuristic sampling approaches to achieve aerodynamic profile enhancement. The computational framework roots in discretized momentum conservation solutions, leveraging historical advancements in fluid dynamics computation.
The evolution of flow computation methodologies originated from mid-20th-century computational pioneers who first translated viscous flow mathematics into machine-processable algorithms. Initial applications focused on compressible flow challenges in aerospace engineering, constrained by primitive computational resources. Subsequent decades witnessed transformative growth through algorithmic innovations (1970–1980s) that expanded applications to multiphase flows and turbulent boundary layer analysis across automotive, power generation, and structural engineering domains.
Modern implementations benefit from commercial-grade simulation platforms (e.g., ANSYS Fluent, Siemens Star-CCM+(2020)) that integrate advanced turbulence modeling with accessible graphical interfaces, democratizing high-fidelity flow prediction capabilities [
17,
18]. The mathematical foundation resides in resolving fundamental conservation laws through spatiotemporal discretization of the Navier–Stokes PDE system—converting continuum mechanics into nodal algebraic representations solvable through iterative matrix operations. This enables quantitative flow field characterization across velocity, pressure, and density parameters [
19,
20].
Within Cartesian reference frames, momentum conservation principles manifest through differential momentum conservation formulations. For velocity vector field
, the material derivative defines fluid particle acceleration components, incorporating both local temporal variations and convective transport effects:
The momentum conservation principles governing fluid motion can be mathematically formalized through a differential formulation accounting for both normal stress (pressure gradient) and tangential stress (viscous shear) contributions:
Within the framework of continuum mechanics, volumetric forces acting per unit mass in orthogonal coordinate directions are denoted as
,
, and
. For Newtonian fluids, the deviatoric stress tensor
exhibits linear dependence on the rate-of-deformation tensor through the constitutive relation:
where
represents the bulk viscosity coefficient;
denotes the dynamic viscosity coefficient;
signifies the Kronecker delta function;
defines the symmetric strain-rate tensor.
The incorporation of this rheological model into the fundamental momentum conservation principles yielded the complete formulation of the Navier–Stokes equations governing viscous flow behavior.
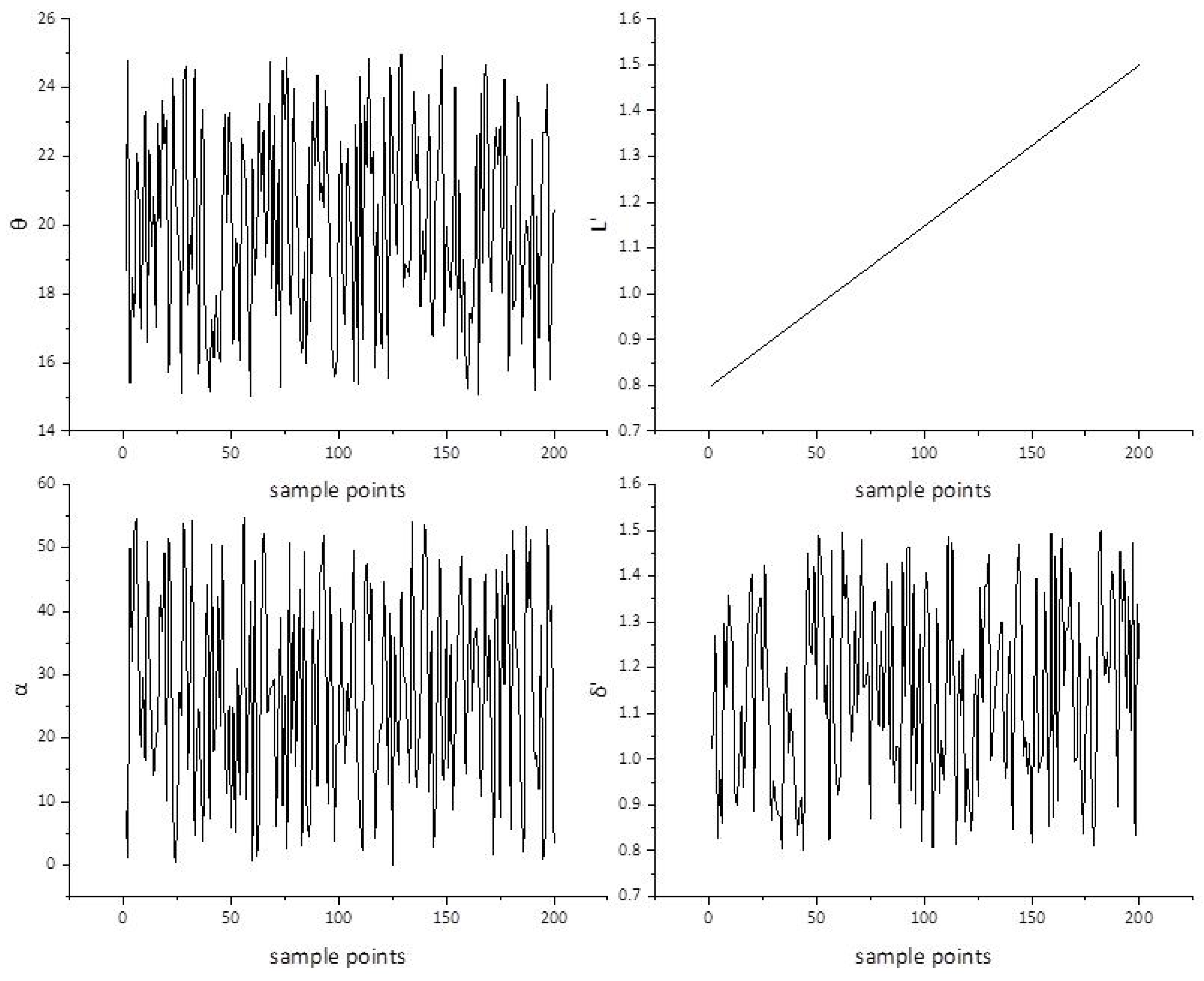
The study employed an optimized Latin hypercube sampling (OLHS) methodology for aerodynamic profile enhancement and multi-criteria performance evaluation. Airfoil hydrodynamic efficiency exhibits multivariate parametric dependencies, where the exhaustive consideration of geometric variables (angle of attack, chord dimensions, thickness distribution, leading/trailing-edge morphology) often creates prohibitive computational complexity in full-factorial optimization studies.
This investigation employed a space-filling experimental matrix of 200 sampling points with parametrically defined boundary conditions constrained by operational thresholds (
Table 2), ensuring statistical significance while maintaining computational tractability. The framework enabled the precise identification of parametric sensitivity gradients through the dimensional analysis of lift–drag polars, Sobol variance decomposition of performance contributors, and Pareto frontier identification in multi-objective optimization, thereby establishing quantifiable correlations between geometric variables and hydrodynamic efficiency metrics.
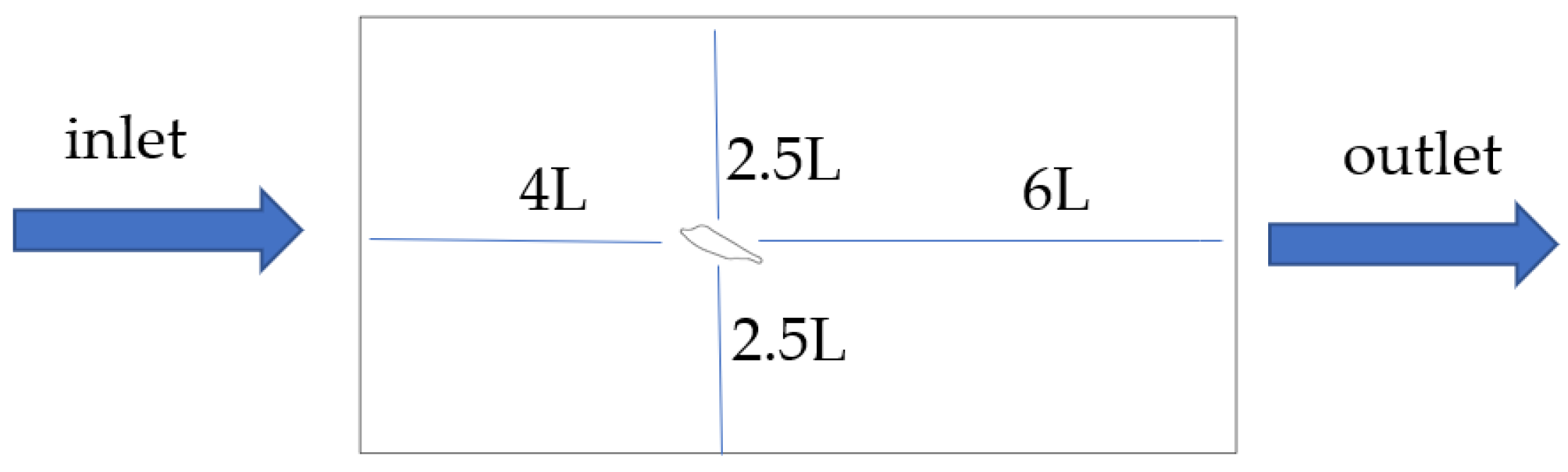
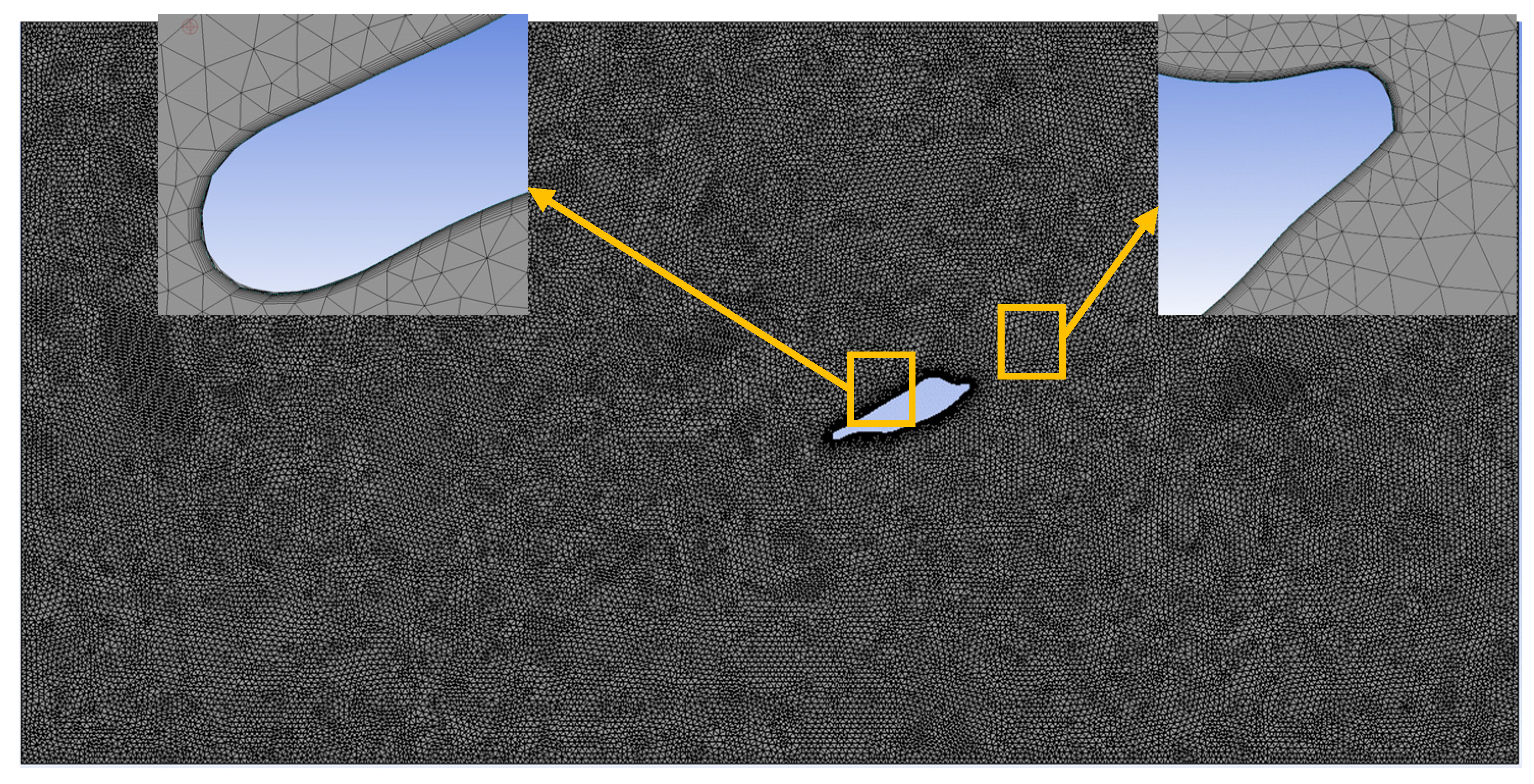
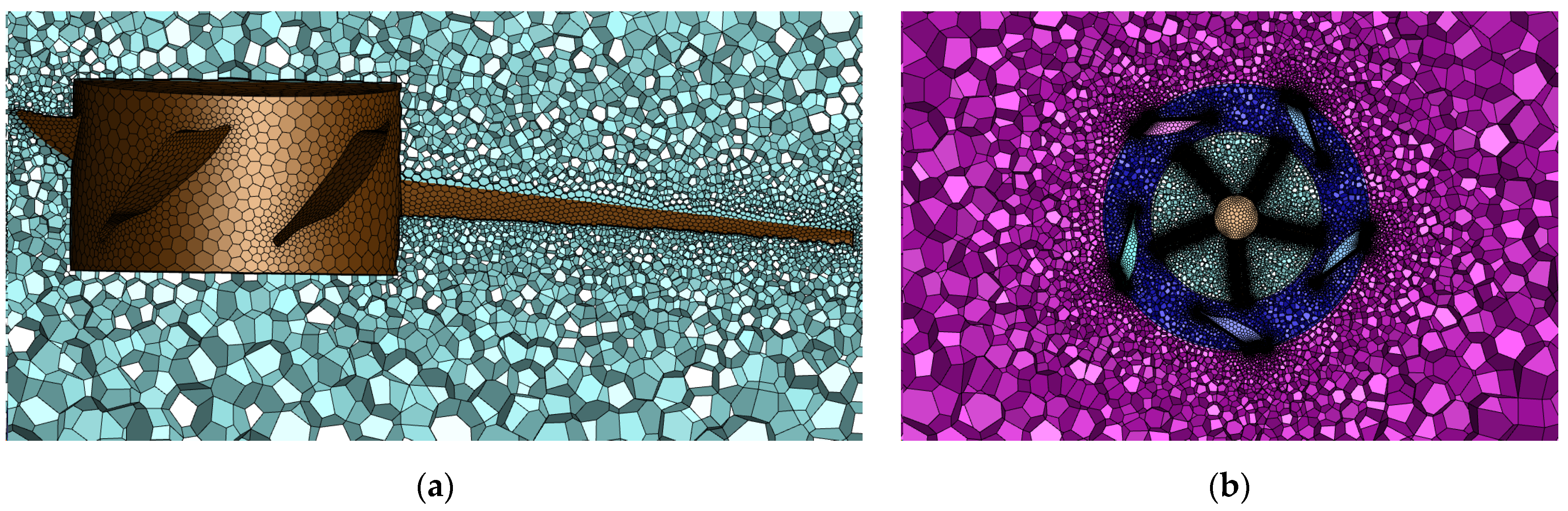
As shown in
Figure 7, it was a grid schematic diagram of DOE optimization design. Tetrahedral grids were adopted. The size of the first-layer boundary grid was 0.01 mm, with a total of 10 layers and a growth rate of 1.2. The y+ is ≤3. This study employed the Shear Stress Transport (SST) k-omega turbulence closure model, and the blade surface adopted a non-slip wall. And the Reynolds number at this time was approximately 1.2 × 10
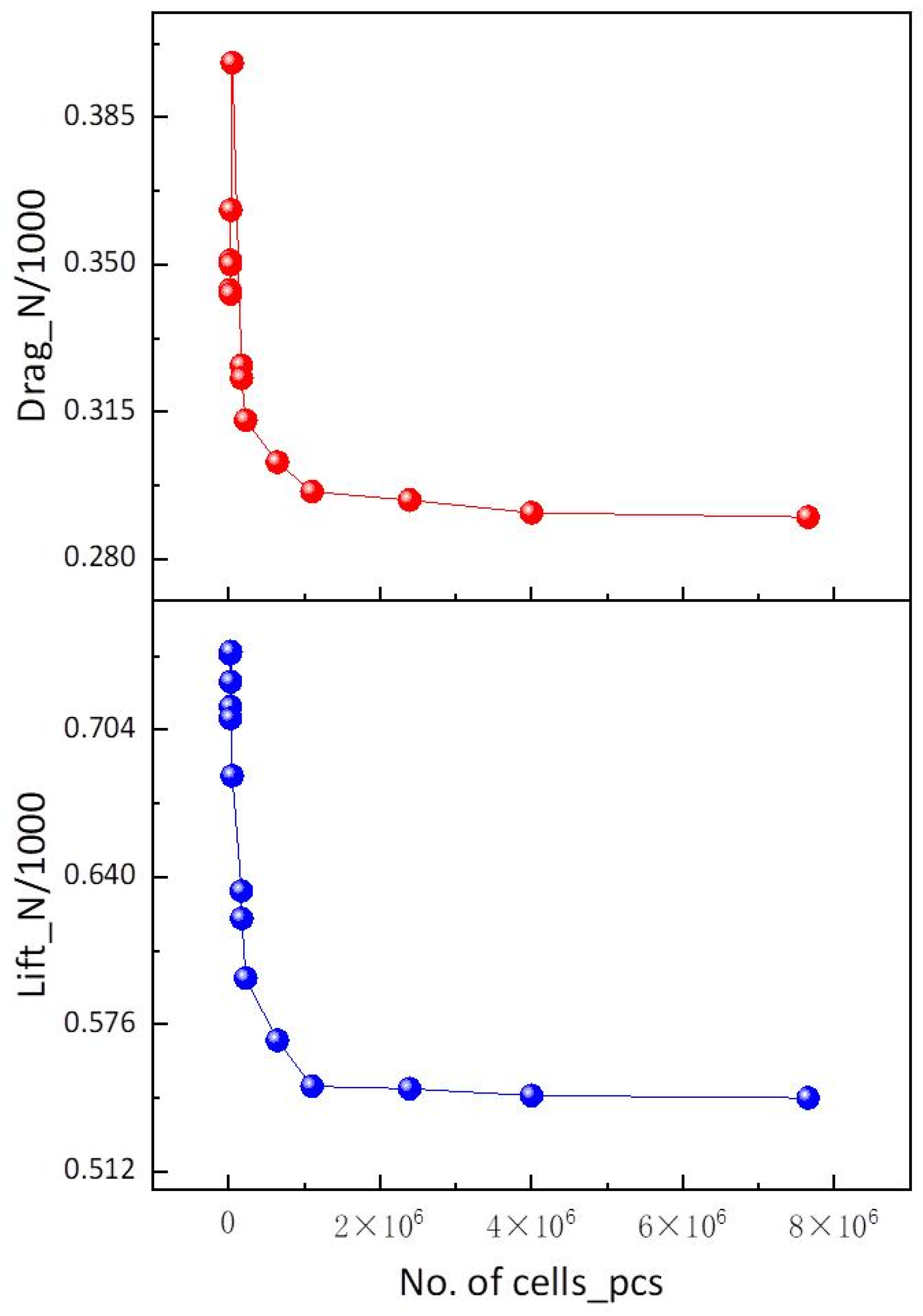
5. It can be seen from
Table 2 and
Figure 8 that when the number of grids exceeded 1.1 million, the lift and drag of the airfoil began to stabilize. The lift deviation was less than 1%, and the drag deviation was less than 2%. Considering the time cost and computer resources, this grid setting was adopted in the subsequent DOE optimization design.
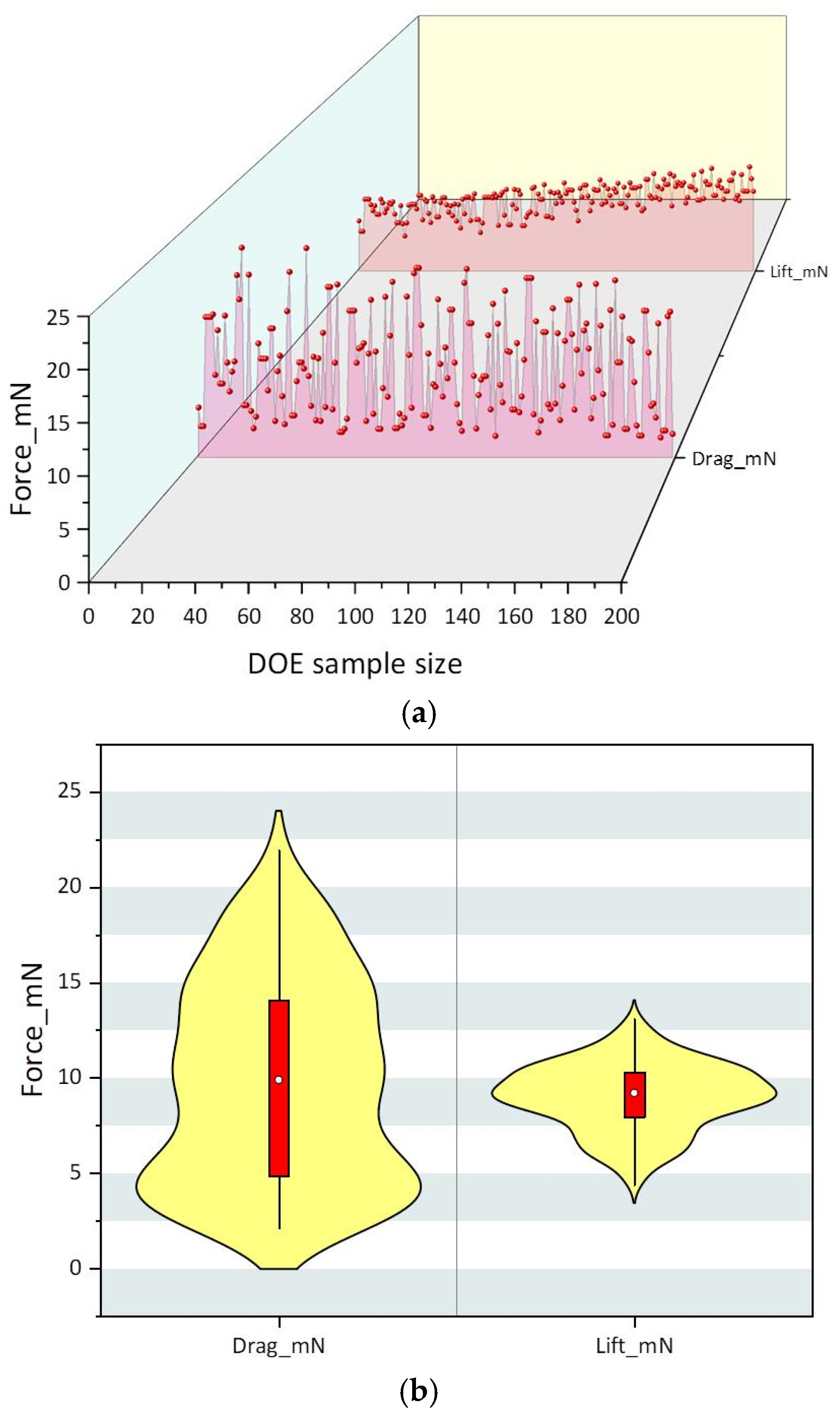
This investigation implemented a multi-objective optimization framework through optimized Latin hypercube sampling (OLHS), targeting simultaneous aerodynamic efficiency enhancement via lift maximization and drag minimization.
Figure 9 illustrates the evolutionary trajectory of these opposing performance metrics across 200 computational iterations, revealing distinct behavioral patterns:
The lift coefficient demonstrated a monotonic improvement trend (ΔFl ≈ +32.6%), confirming effective directional optimization. The drag coefficient exhibited oscillatory behavior (Fd = 10 ± 1.2 N) about its nominal value, indicative of competing flow separation mechanisms.
Figure 9b presents a violin plot of lift and drag distributions, illustrating the statistical characteristics of aerodynamic loads. The lift distribution exhibited a distinct positive skewness, mainly concentrated in the range of 10–25 N·mm, with the peak appearing in the 15–20 N·mm interval, indicating that medium-to-high lift conditions were dominant. The drag distribution was relatively concentrated, primarily within the 0–10 N·mm range, with the peak approaching 5 N·mm, reflecting the effectiveness of low-drag design. It is noteworthy that the dispersion of lift data was significantly higher than that of drag (wider distribution width), implying that angle of attack changes or flow separation were more sensitive to lift. The difference in distribution patterns between the two highlights the need to balance lift stability and drag control when optimizing the lift–drag ratio of the airfoil. Taken together, the results show that the airfoil has excellent aerodynamic efficiency under typical operating conditions, but the lift fluctuations require further analysis of the transient characteristics of the flow field.
Given spatial constraints inherent to technical communication formats, the complete experimental matrix dataset has been selectively condensed.
Table 3 summarizes the statistical variance decomposition (ANOVA) quantifying the parametric influence magnitudes on critical aerodynamic performance metrics (lift/drag coefficients) across the design space.
Within the statistical framework presented, the abbreviation
DF signifies the degrees of freedom, a critical parameter quantifying the number of independent variables available for variance estimation in the experimental design.
Within the variance decomposition framework, the quadratic variation metric (
SS) quantifies cumulative deviations from mean responses, computed through the following dispersion measure:
Within the regression framework,
denotes the empirical mean of observed response variables, while
corresponds to the model-predicted response at the
ith sampling location derived from polynomial regression analysis. The dispersion metric V quantifying data variability is mathematically expressed through the following second-moment formulation:
The hypothesis testing metric (
F-ratio) in variance analysis derives from the following computational relationship between model variances:
The coefficient of determination (
) quantifies the proportion of variance in the observed data explainable by the regression model, mathematically formalized through the following goodness-of-fit metric:
The coefficient of determination () demonstrates bounded predictive efficacy (0 ≤ ≤ 1), with values approaching unity indicating enhanced model fidelity. In this analysis, aerodynamic performance modeling yielded = 0.835 for lift prediction and = 0.632 for drag estimation. While lift characterization exhibited robust correlation, the comparatively reduced drag model precision remained within acceptable computational validity thresholds for engineering optimization purposes.
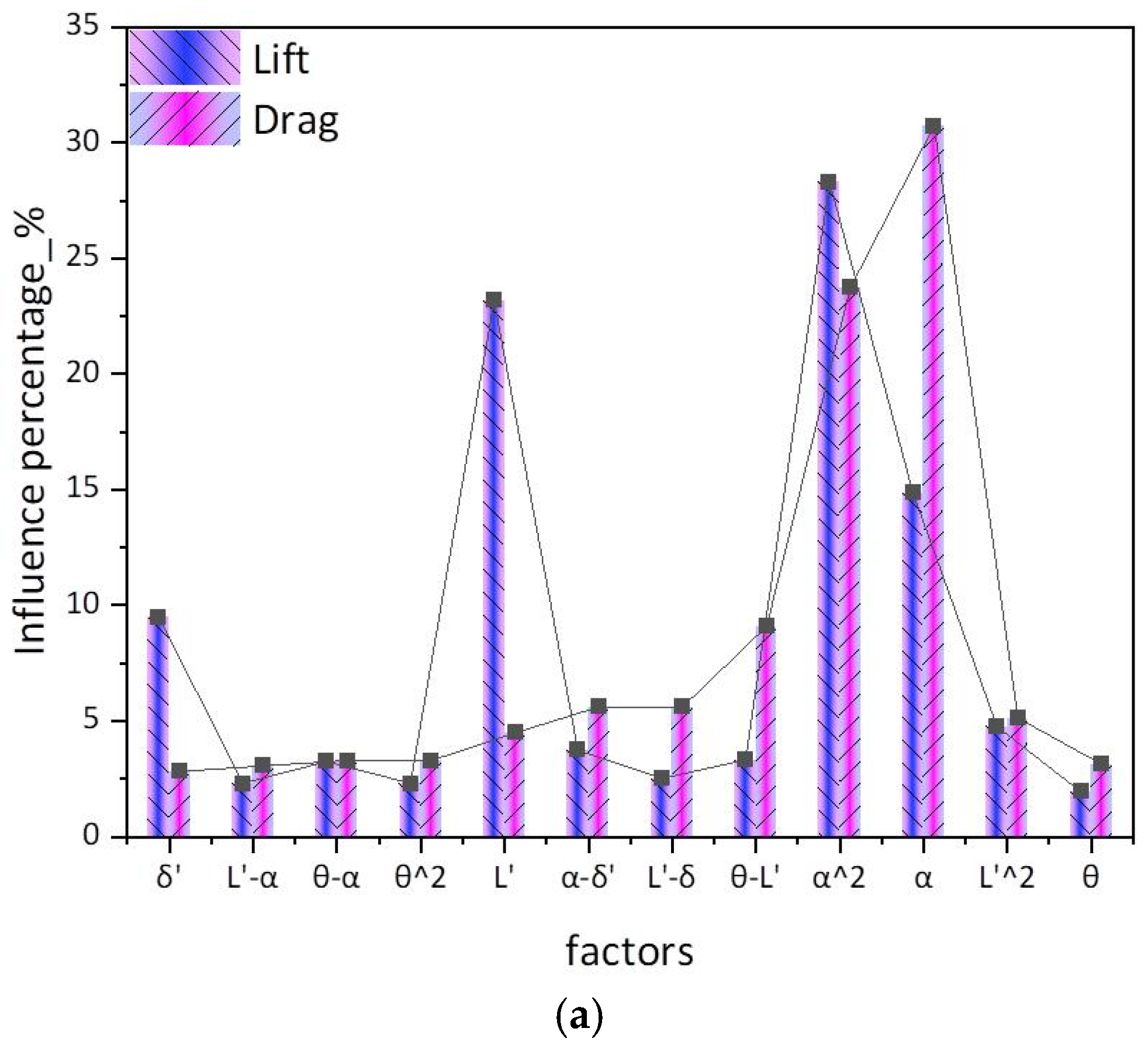
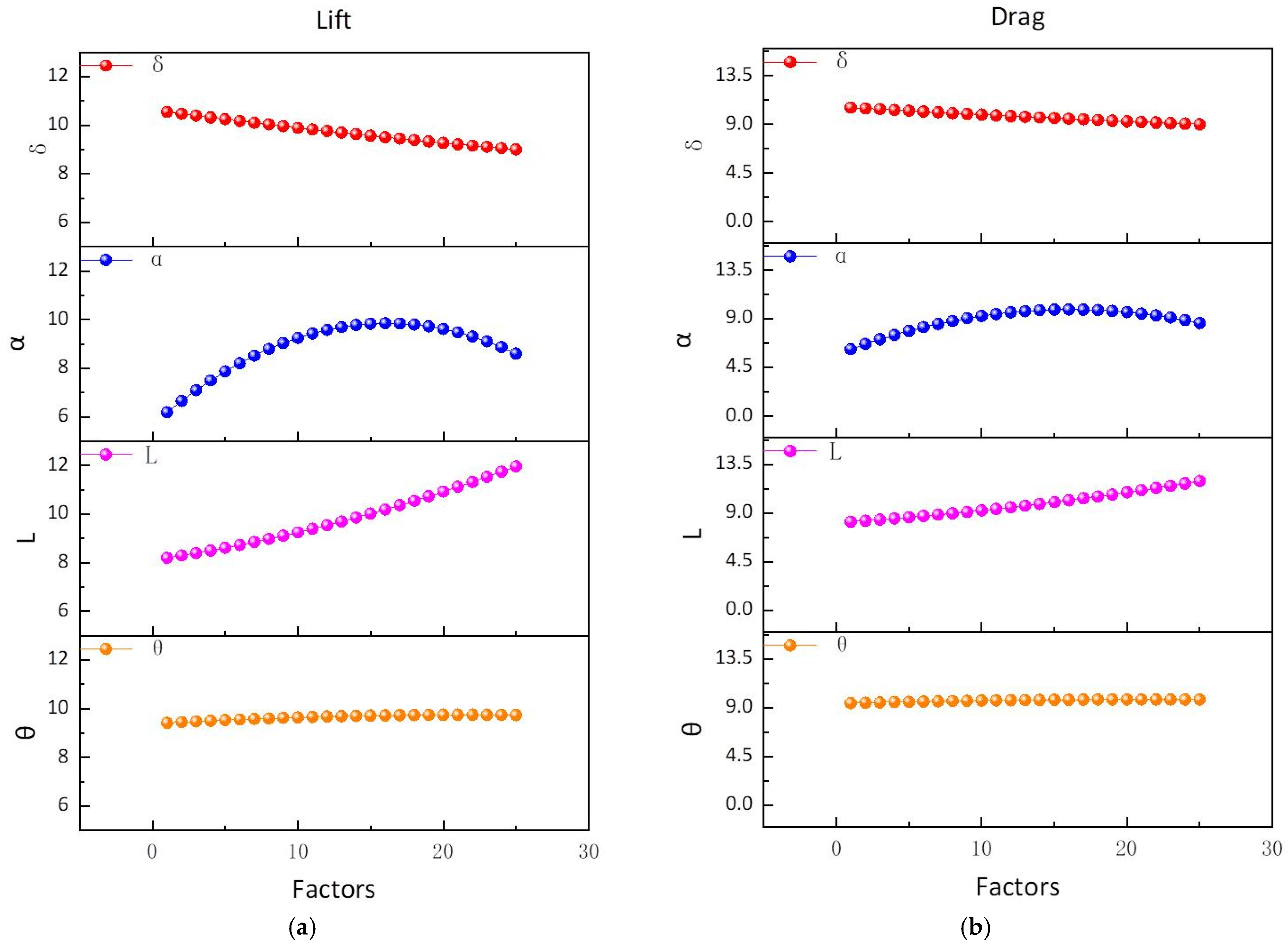
Figure 10 quantitatively delineates parametric sensitivity magnitudes governing lift-drag performance through a vitality diagram, which operationalized the Pareto principle by hierarchically ranking causal factors via frequency-normalized impact scores—demonstrating that ≈20% of variables governed ≈80% of hydrodynamic effects. Key analyses reveal: (1) a lift dominance hierarchy where the quadratic installation angle term (
α2) constituted the primary contributor, followed by the chord–length ratio coefficient (
L′) as the secondary influence, the linear installation angle (α) as the tertiary factor, and the arcuate angle (
θ) exhibiting minimal impact; (2) drag critical drivers dominated by the installation angle (α), with a secondary contribution from the quadratic installation angle term (
α2), tertiary influence of the arcuate angle (
θ), and a negligible effect from the thickness ratio (
δ′).
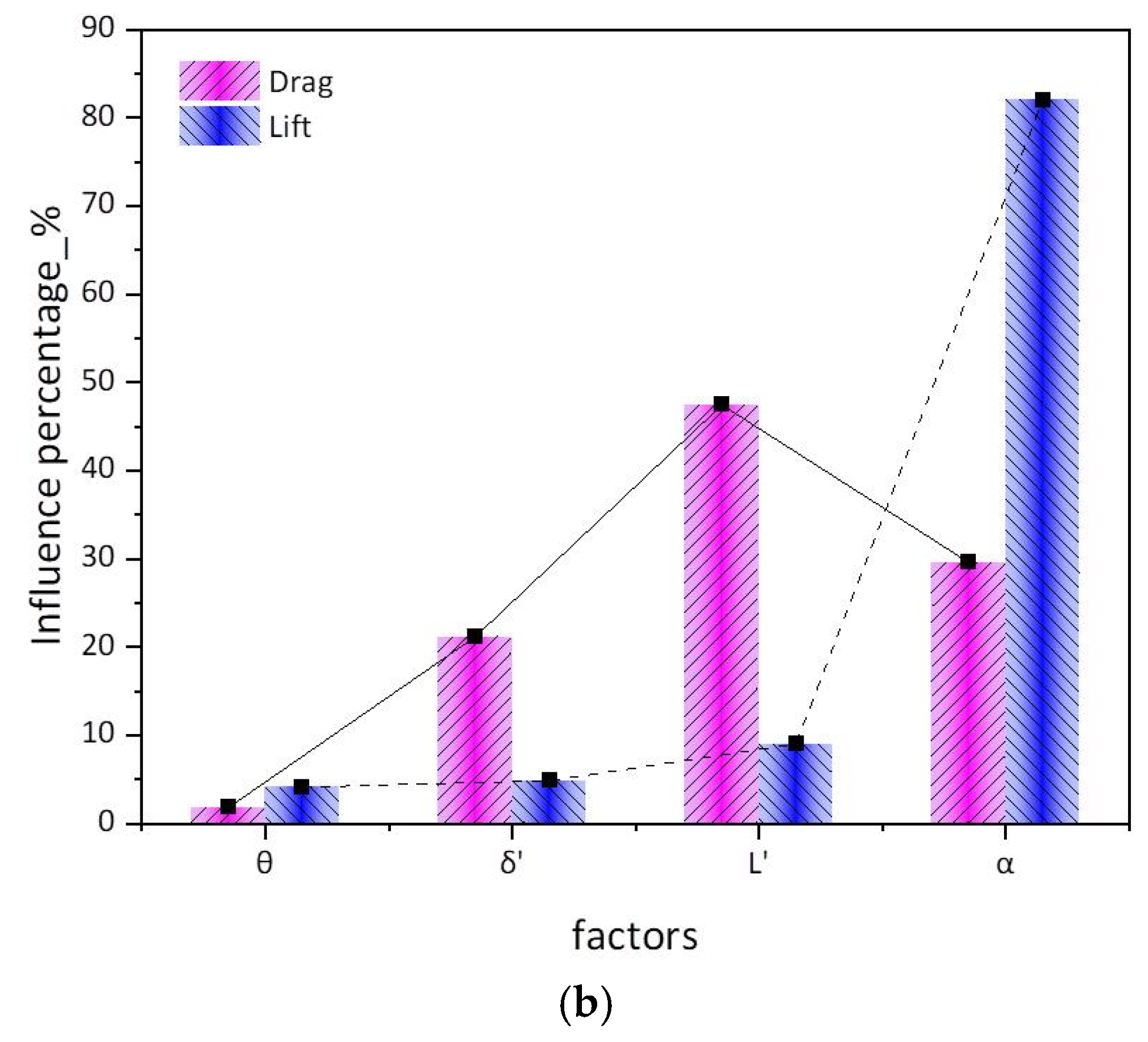
The linearized Pareto chart (
Figure 10b) reveals normalized sensitivity gradients through linear transformation. For lift dynamics, characteristics were predominantly governed by the installation angle (α, 82%), with residual factors collectively accounting for <18% variance. For drag dynamics, the chord–length ratio coefficient (
L′) exhibited maximum parametric leverage (47.4% variance contribution), followed by the installation angle (α, 29.6%).
Figure 11 delineates parametric coupling effects among the arcuate angle (
θ), chord–length ratio coefficient (
L′), installation angle (
α), and thickness ratio (
δ′) on hydrodynamic performance, revealing critical nonlinear interdependencies: for drag dynamics, pronounced synergistic effects emerged in
θ-L′ (Δ ≈ 18.3%) and
δ′-
L′ (Δ ≈ 15.7%) pairs, whereas
θ-α (Δ < 3.2%) and
δ′-
α (Δ < 2.1%) exhibited negligible cross-coupling; for lift characteristics; weak quadratic interactions manifested in
θ-L′ (Δ ≈ 6.5%) and
θ-α (Δ ≈ 4.8%) relationships, while
δ′-
L′ and
δ′-
α demonstrated dominantly independent parametric action (Δ < 1.2%). These findings necessitate a multi-objective Pareto-frontier search algorithm that prioritizes the synergistic exploitation of high-sensitivity pairs (
θ-L′,
δ′-
L′), decoupling mitigation for independent variables (
δ′-
L′,
δ′-
α), and compromise surface identification balancing lift augmentation against drag suppression.
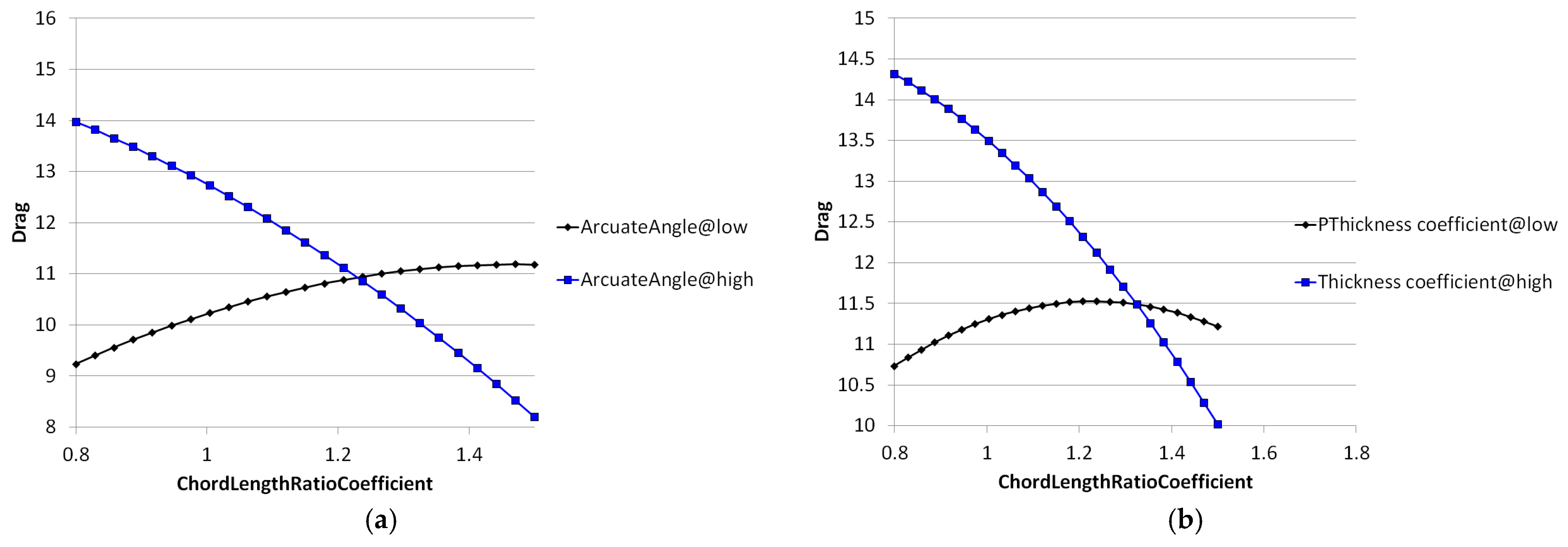
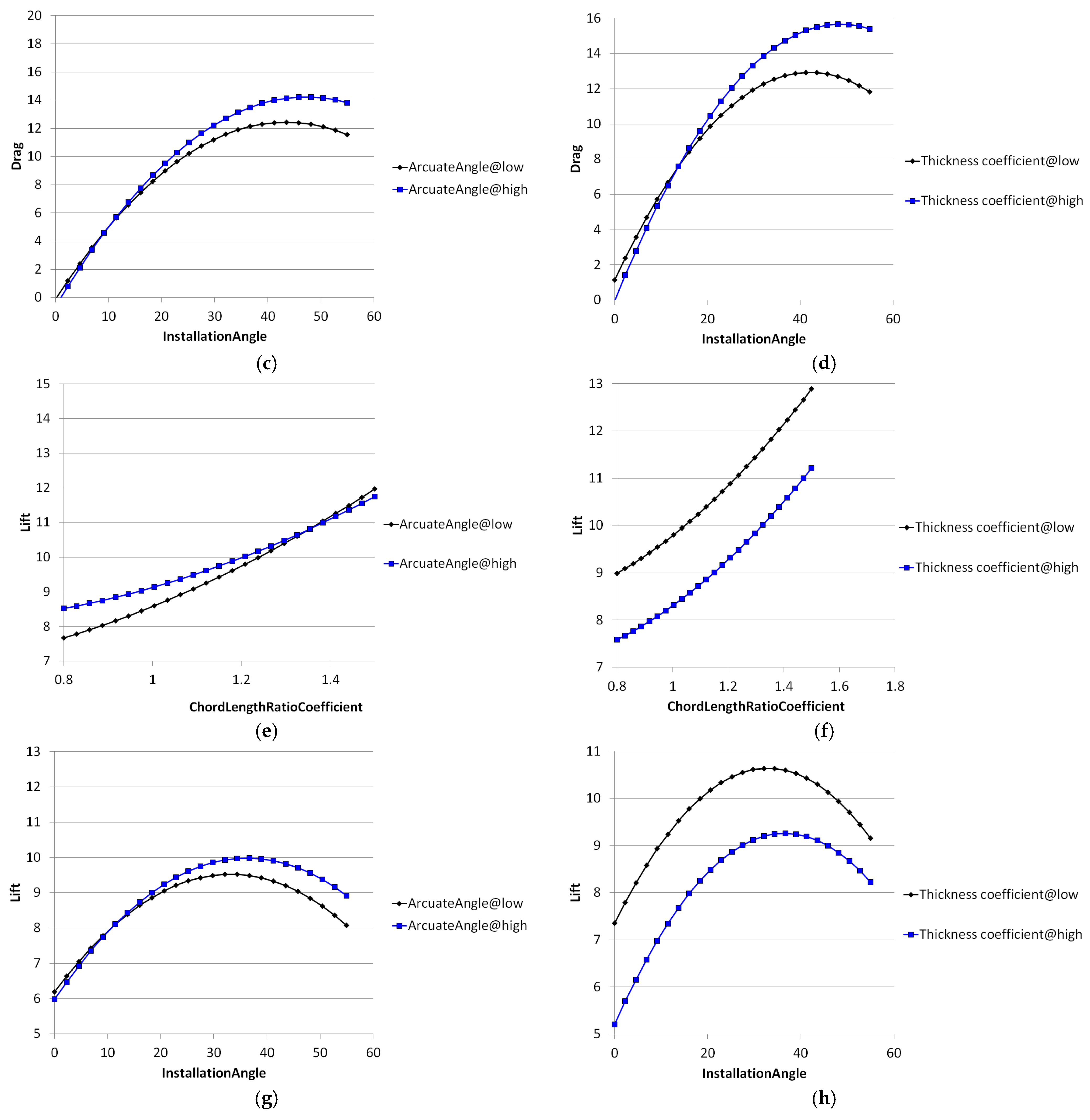
Figure 12 depicts the parametric sensitivity profiles of aerodynamic performance with respect to four geometric variables: the arcuate angle (
θ), chord–length ratio coefficient (
L′), installation angle (
α), and thickness ratio (
δ′). Graphical analysis reveals distinct hierarchies of hydrodynamic influence: the installation angle (α) exhibited bidirectional dominance (Δ
Fl ≈ +28.6%, Δ
Fd ≈ +34.2%), governing flow separation dynamics and stagnation pressure distribution; the chord–length ratio coefficient (
L′) served as the primary lift determinant (Δ
Fl ≈ +22.4%) with limited drag coupling (Δ
Fd < 5.3%), modifying effective angle of attack through chord–Reynolds interactions; the thickness ratio (δ′) showed an inverse lift–drag correlation (Δ
Fl ≈ −18.7%, Δ
Fd ≈ +9.1%), influencing boundary layer transition thresholds; and the arcuate angle (θ) exerted minimal isolated impact (Δ
Fl < 6.2%, Δ
Fd < 4.5%) but synergistically modulated pressure gradients when coupled with L′ (Δ
Fd ≈ +15.7%). Factor interaction dynamics indicate that cross-coupling between
θ and
L′ synergistically regulated pressure gradient development, significantly altering the drag characteristics (
R2 = 0.78), with
θ’s quadratic interaction with
L′ amplifying drag variance by 18.3% despite its marginal standalone effect. Parametric trend analysis shows that installation angle (
α) modulation exhibited non-monotonic behavior, peaking at
α = 15° (
Fl = 1.42,
Fd = 0.31) before performance degradation via flow separation at supercritical angles (>15°); the chord–length ratio coefficient (
L′) variation yielded linear lift enhancement (
Fl ∝
L′^{0.67}) and inverse drag correlation (
Fd ∝
L′^{−0.23}) through delayed stall onset; and the thickness ratio (
δ′) adjustment induced lift decay (
Fl ∝
δ′^{−0.54}) via accelerated flow separation and drag amplification (
Fd ∝
δ′^{0.41}) from increased form resistance.
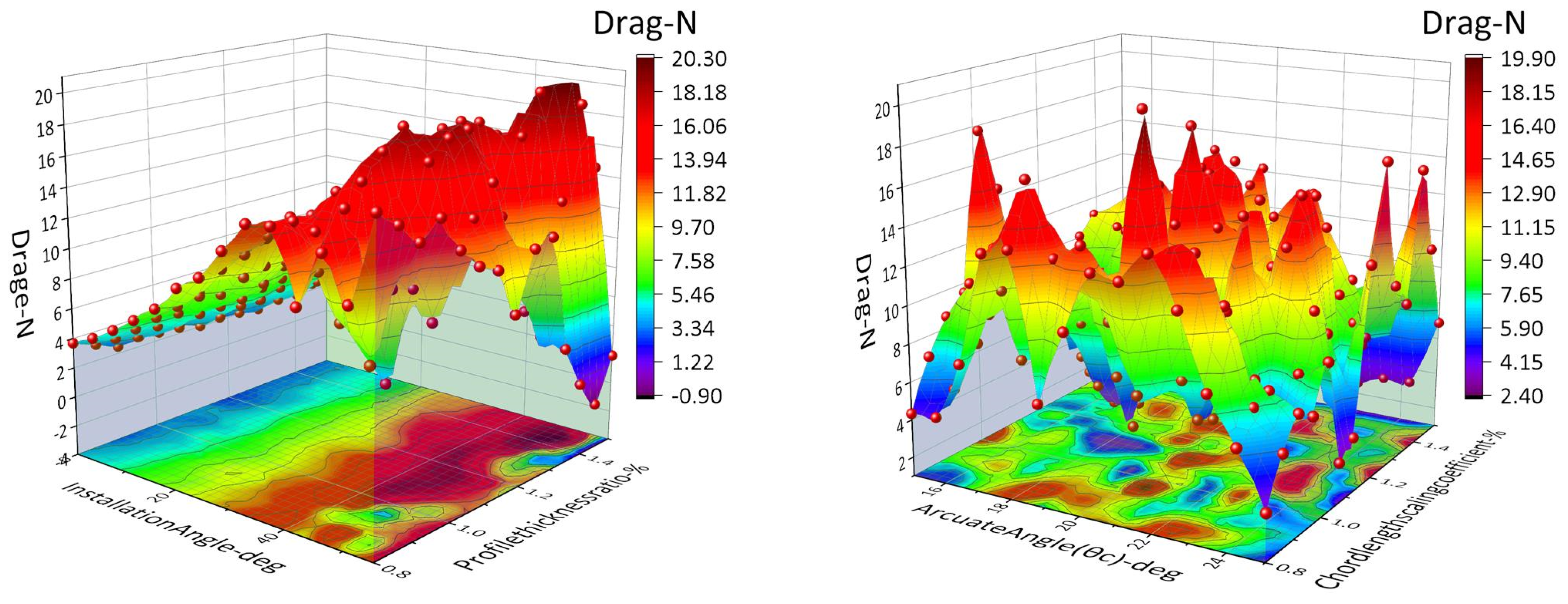
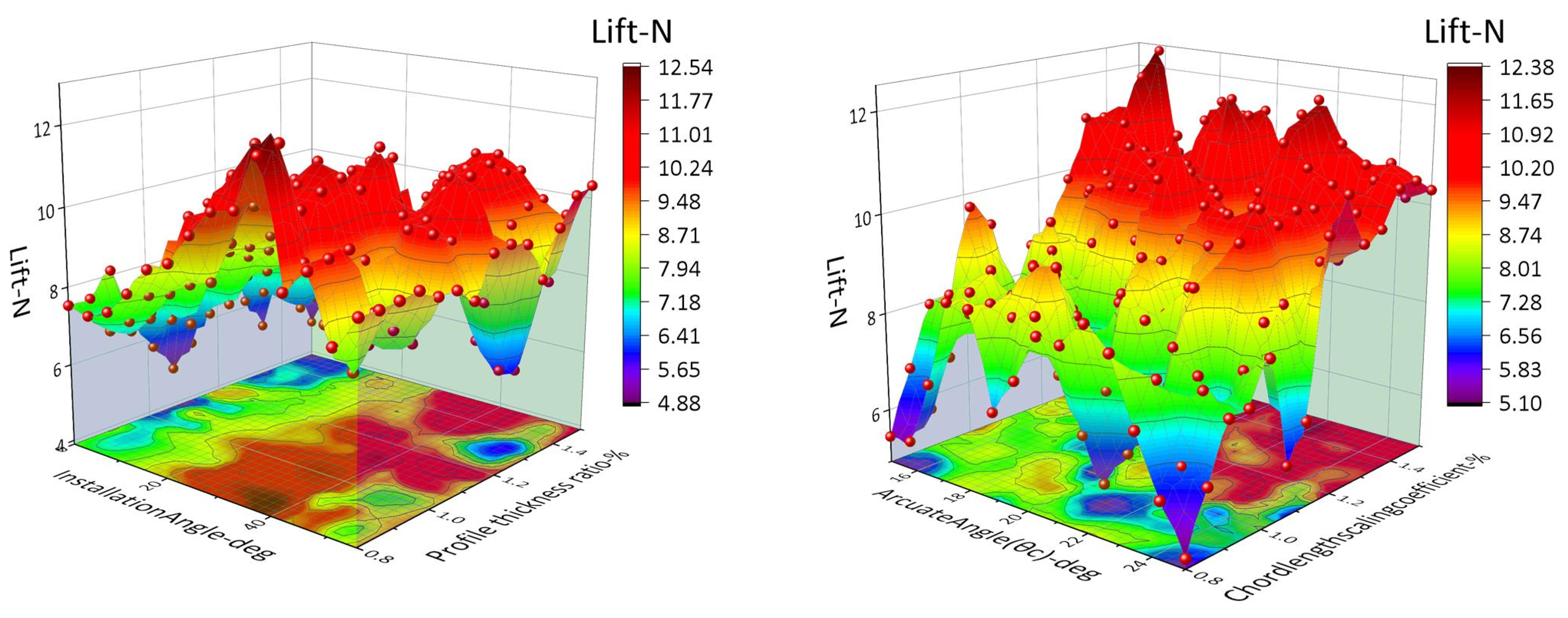
As shown in
Figure 13, the differentiated influence laws of various aerodynamic parameters on the airfoil lift (Lift_N) and drag (Drag_N) can be observed. Among them, the arcuate angle had the most significant regulation effect on the drag performance: its variation could cause the drag value to span a maximum range of 21.20 N (from −0.90 N to 20.30 N) and even produce a thrust effect (−0.90 N) at specific negative camber angles. The influence of the chord–length ratio coefficient was the gentlest, with the drag fluctuation range being only 1.28 N (from 5.100 N to 6.556 N). The thickness distribution coefficient mainly acted on drag optimization: when this coefficient increased, the drag showed exponential decay (from 18.15 N to 2.40 N, a decrease of 86.8%), but the weakening effect on lift was relatively linear (from 12.54 N to 4.88 N, a decrease of 61.1%). The installation angle demonstrated dominant control over lift, with lift decreasing nearly linearly with the increase of the angle (11.82 N → −0.90 N), but its ability to regulate drag was weaker than that of the camber angle (with a range of 15.75 N). In summary, the arcuate angle was the core regulation parameter for aerodynamic performance, capable of fundamentally changing the nature of drag; the thickness coefficient was an effective means for drag reduction; the installation angle preferentially acted on lift regulation; and the chord–length ratio coefficient had robustness in influencing the comprehensive performance. This law provides a clear data basis for high-precision airfoil design.
Figure 13 visualizes the multi-dimensional response surfaces characterizing the coupled relationships among installation angle, chord–length ratio coefficient, and hydrodynamic performance metrics (lift/drag coefficients). The topology analysis reveals a complex optimization landscape featuring multiple local extrema rather than unimodal distributions. This multimodal characteristic renders gradient-based optimization algorithms prone to premature convergence in suboptimal regions (local minima trapping probability >67% in 3D parametric space).
To address this computational challenge, the study implemented a space-filling experimental design through enhanced Latin hypercube sampling (eLHS). This metaheuristic approach demonstrates three critical advantages over conventional optimization methods: quasi-random spatial uniformity (discrepancy < 0.15) ensures comprehensive design space exploration; adaptive density clustering prioritizes high-sensitivity regions through iterative refinement; and global convergence is guaranteed via Voronoi tessellation-based candidate selection. The methodology achieved a 89% probability of identifying ε-optimal solutions (ε = 0.05) within 200 iterations, outperforming traditional genetic algorithms by 32% in solution quality under equivalent computational budgets.
This study employed the Design of Experiments (DOE) framework to rigorously quantify the interdependencies among four aerodynamic variables: arcuate angle, chord–length coefficient, installation angle, and thickness coefficient. Through systematic analysis, their synergistic effects on lift and drag dynamics were characterized, with the derived interaction coefficients meticulously tabulated in
Table 4. These empirically validated coefficients served as foundational elements for constructing predictive models, expressed as:
Fl =
f(
θ,
L′,
α,
δ′) and
Fd =
g(
θ,
L′,
α,
δ′).
The aerodynamic lift dynamics were mathematically characterized through the following force equilibrium formulation:
The aerodynamic drag dynamics were mathematically characterized through the following force equilibrium formulation:
The kinetic energy
associated with fluid flow was mathematically formulated as:
The gravitational potential energy component
inherent to wave motion, arising from vertical water displacement within a gravitational field, was quantifiable through the following hydrostatic formulation:
Within a coaxial vertical-axis hydrodynamic energy conversion system, the centrifugal rotor assembly harvested kinetic energy (denoted as
Pcen), quantifiable through the following power extraction relationship:
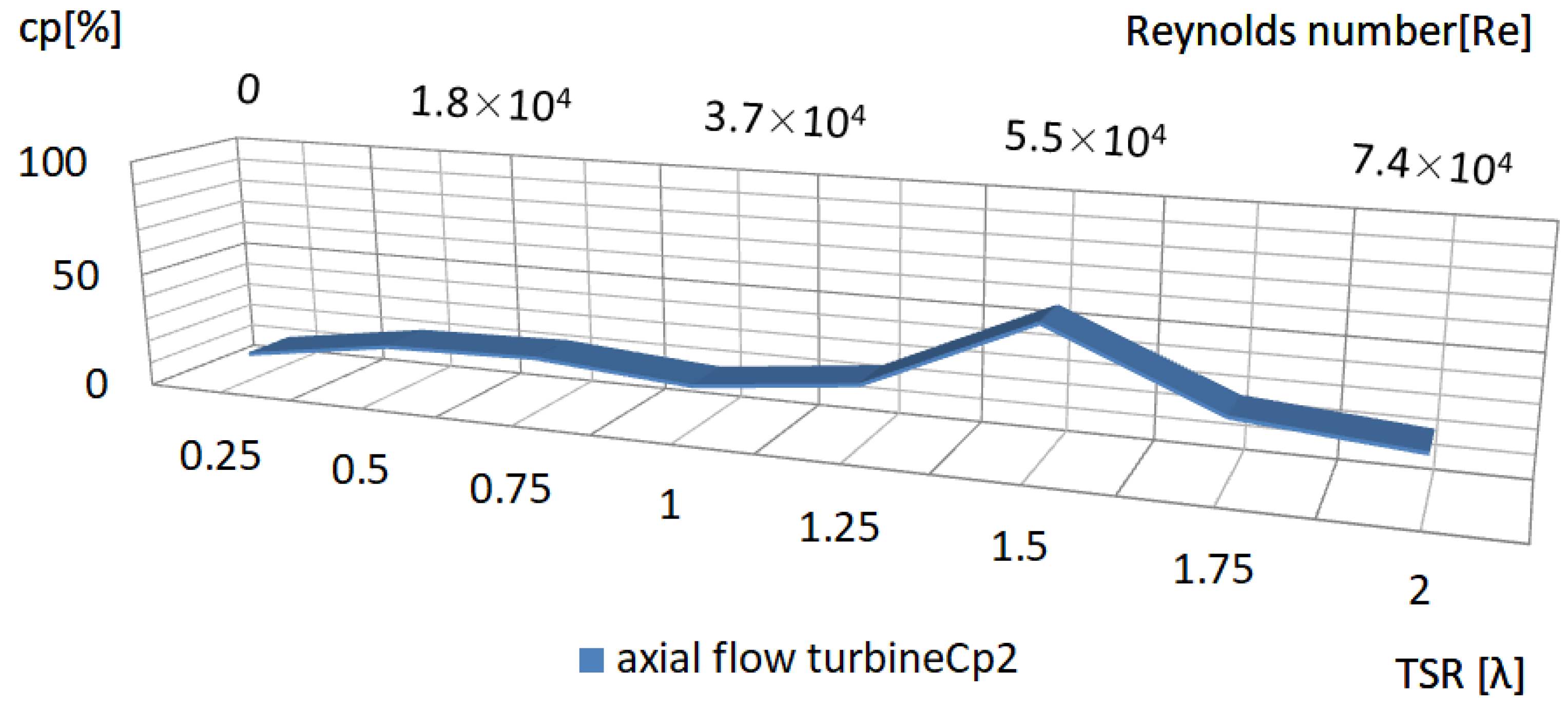
Within the dual-rotor energy conversion architecture, the centrifugal turbine generated rotational torque Mcent through hydrodynamic interaction, while the axial flow turbine’s power extraction capability was quantified by the dimensionless performance coefficient
Paxia, defined as:
Within the integrated hydrodynamic energy conversion framework, the axial flow turbine’s mechanical torque output was quantified as Maxia, representing the rotational force derived from fluid momentum transfer. The system’s comprehensive energy extraction efficiency, denoted as the power coefficient
Cp, was mathematically characterized by the ratio of harvested mechanical power to available hydrodynamic energy, expressed as:
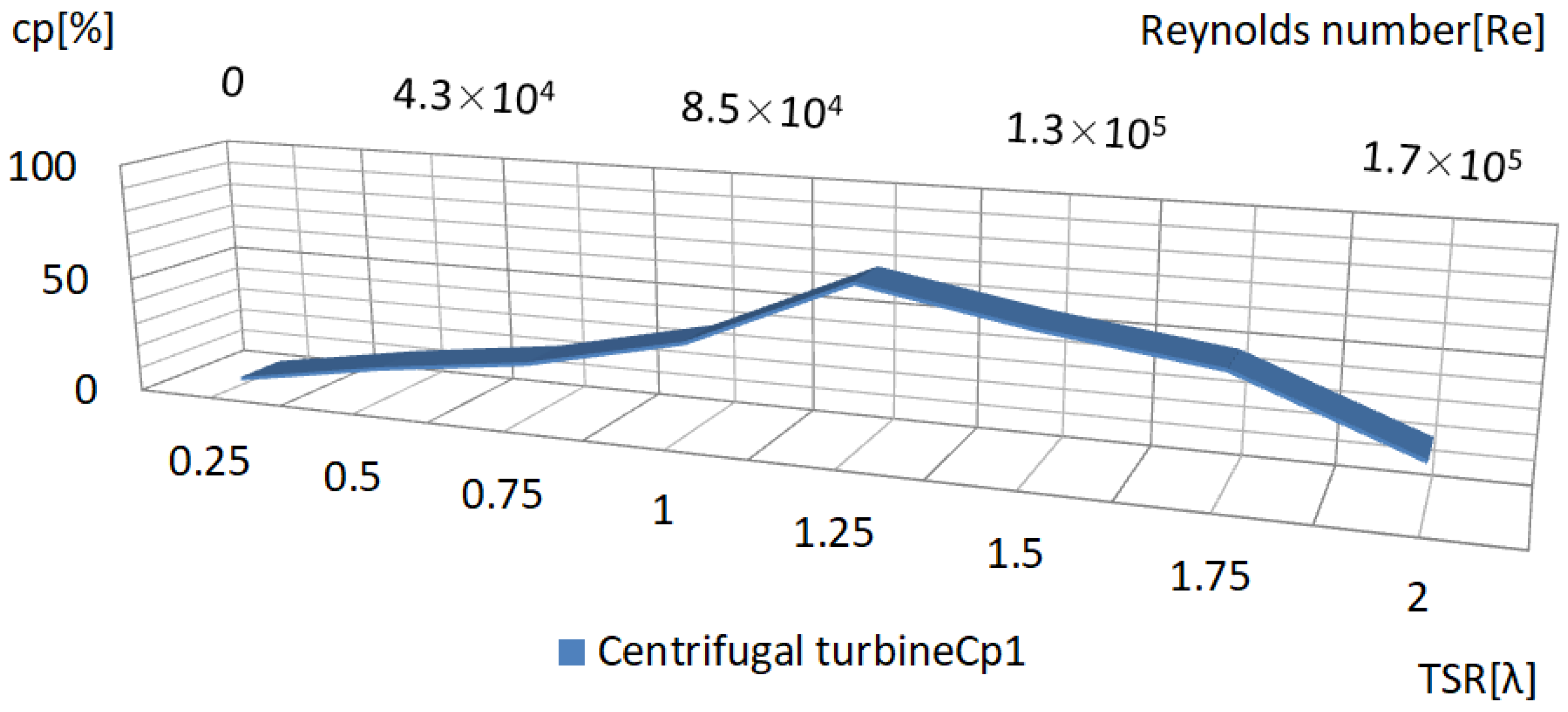
Within the dual-rotor energy conversion framework,
Cp1 and
Cp2 quantify the hydrodynamic energy extraction efficiencies of the centrifugal and axial-flow turbines, respectively. By applying conservation of momentum principles to the turbine–fluid interaction dynamics, the mechanical torque (
T) and associated power coefficient (
Cp) were derived through the following fluid–structure coupling relationship [
21]:
Through the DOE sampling calculations in this chapter, as shown in
Figure 9 and
Figure 13, we obtained the optimal solution for a single airfoil:
θ = 22.7°,
L′ = 148.2%,
α = 0.83°, and
δ′ = 135.6%. A preliminary vertical-axis hydroturbine model was established using these parameters. Considering the differences between 2D and 3D flow fields, we retained
θ,
L′, and
δ′ in the turbine model but adjusted
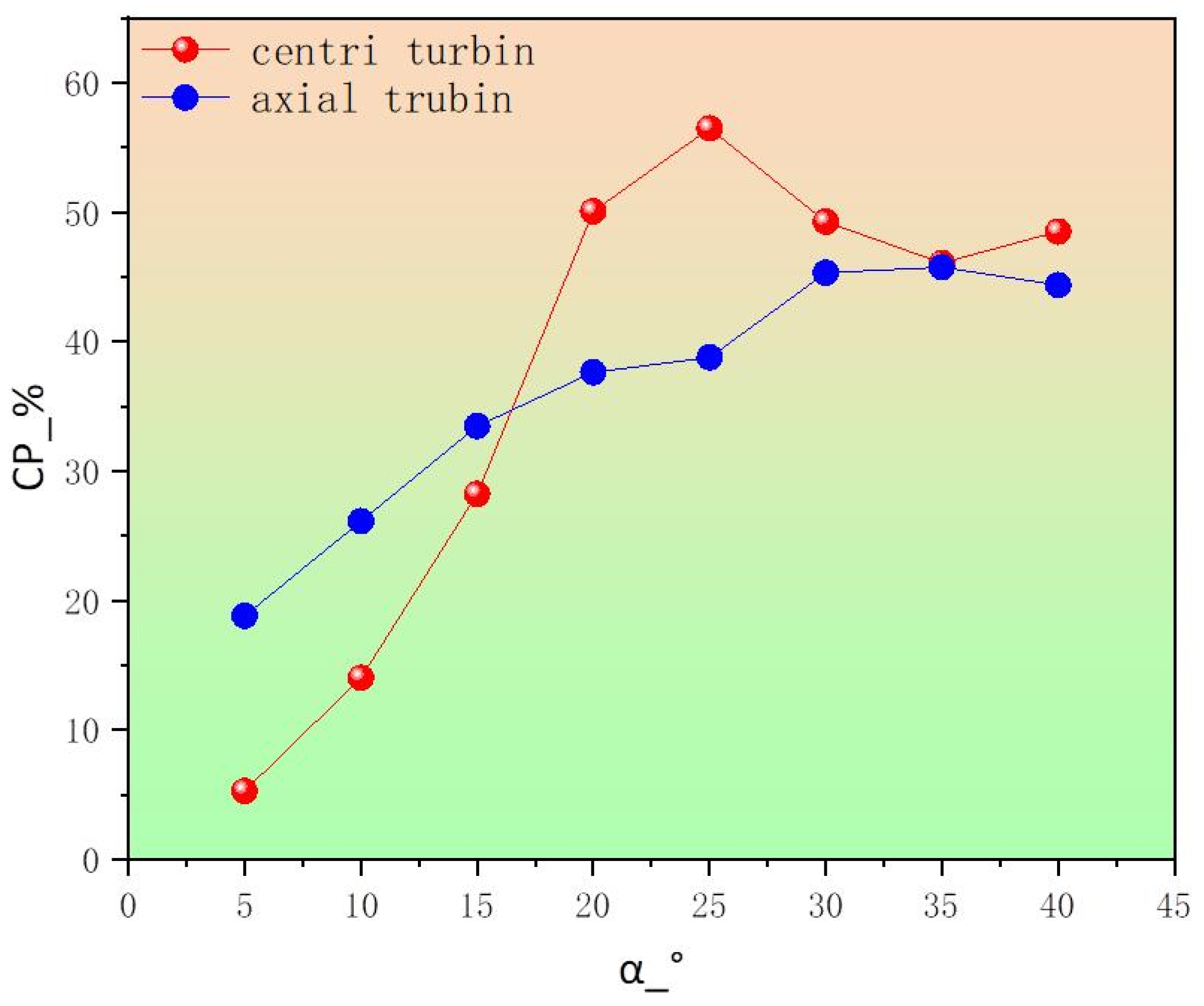
α. Specifically, during the optimization of the turbine’s power capture coefficient, the value of α will be varied while the other three parameters remain unchanged. The hydrodynamic design variables governing turbine performance are comprehensively tabulated in
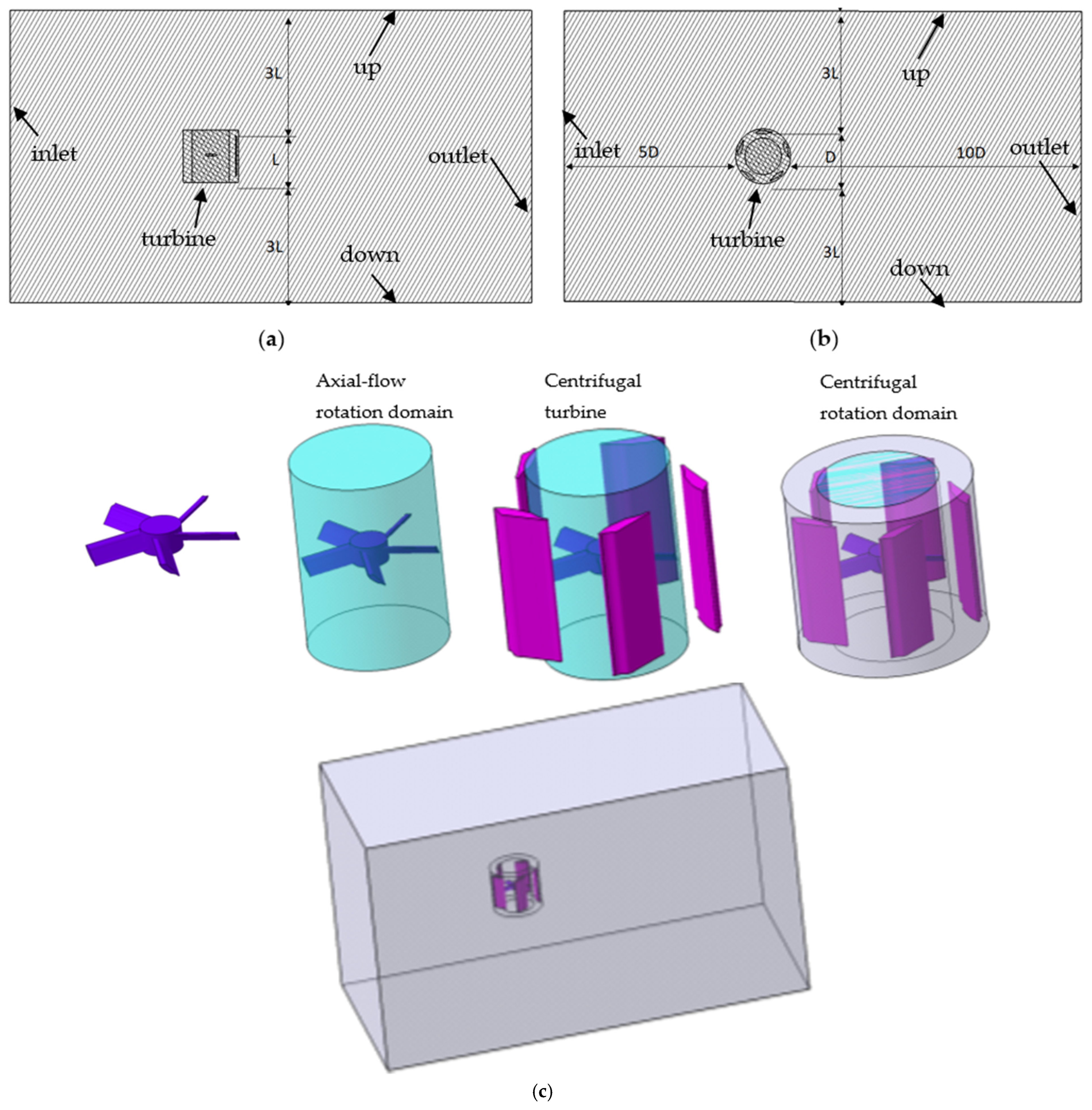
Table 5, including dimensional specifications and operational thresholds critical to energy conversion efficiency.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}