
Electrical Resistivity Tomography Methods and Technical Research for Hydrate-Based Carbon Sequestration

 , and
, and
Abstract
1. Introduction
2. Experimental Theory
3. Experimental Methods
3.1. Solution Methods for the ERT Forward Problem
3.2. Solution Methods for the ERT Inverse Problem
3.2.1. The Conjugate Gradient Algorithm [36]
- Regularization of the sensitivity matrix. The sensitivity matrix calculated above is not a symmetric positive definite matrix, so its transpose (ST) at both ends of the formula should be multiplied simultaneously in order to convert the coefficient matrix to a symmetric positive definite matrix; otherwise, the conjugate gradient algorithm cannot converge. The regularization of the sensitivity matrix yields Formula (2) as follows:
- 2.
- Iterative calculation. In accordance with the principle of calculating the conjugate gradient above, for any initial value of x0, the first iteration of the direction of and then the directions of the subsequent conjugate gradients are, in turn, iteratively calculated in accordance with Formulas (3)–(7) as follows:
3.2.2. The Back-Projection Method
- The difference between the actual measured voltage and the background voltage. The actual measured voltage is , and the background voltage () is calculated from the forward model. The voltage difference is shown in Formula (10) as follows:
- Constructing the sensitivity matrix and voltage difference vector. The sensitivity matrix (S) is arranged in two dimensions, with rows corresponding to the measurement pairs (i,j) and columns corresponding to the pixels (k). The voltage difference () is organized as a vector.
- Using inverse projection to calculate the conductivity change. The resistivity change () is obtained by multiplying the sensitivity matrix’s transpose with the voltage difference, as shown in Formula (11):That is, the amount of the change per pixel k is shown in Formula (12) as follows:
- Normalization. Normalization to is carried out as shown in Formula (13):where is a small constant to avoid dividing by zero.
- The reconstruction of the result output. The value is output as a resistivity change image.
3.2.3. Neural Network Methods
The Preparation of the Training Dataset
- (1)
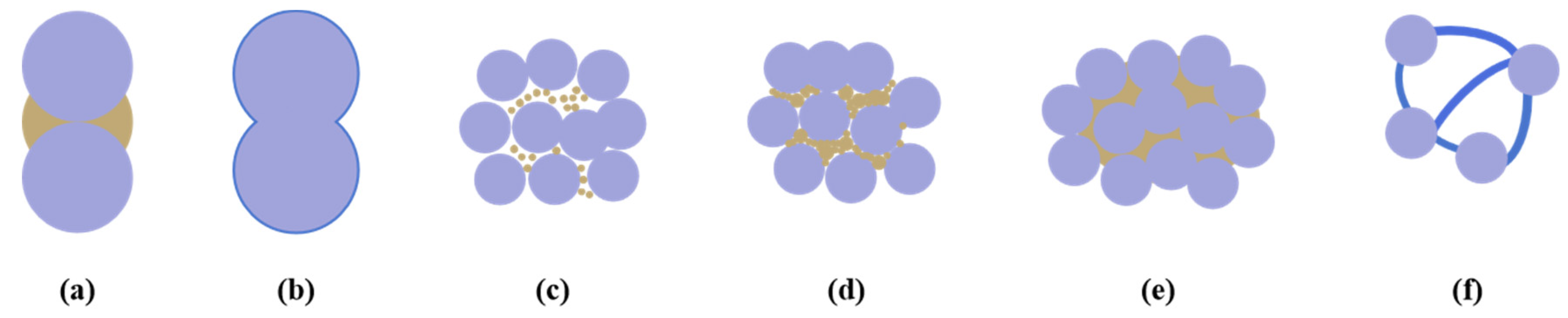
- Blocky or Nodular Hydrate Model:
- (2)
- Layered or Vein-type Hydrate Model:
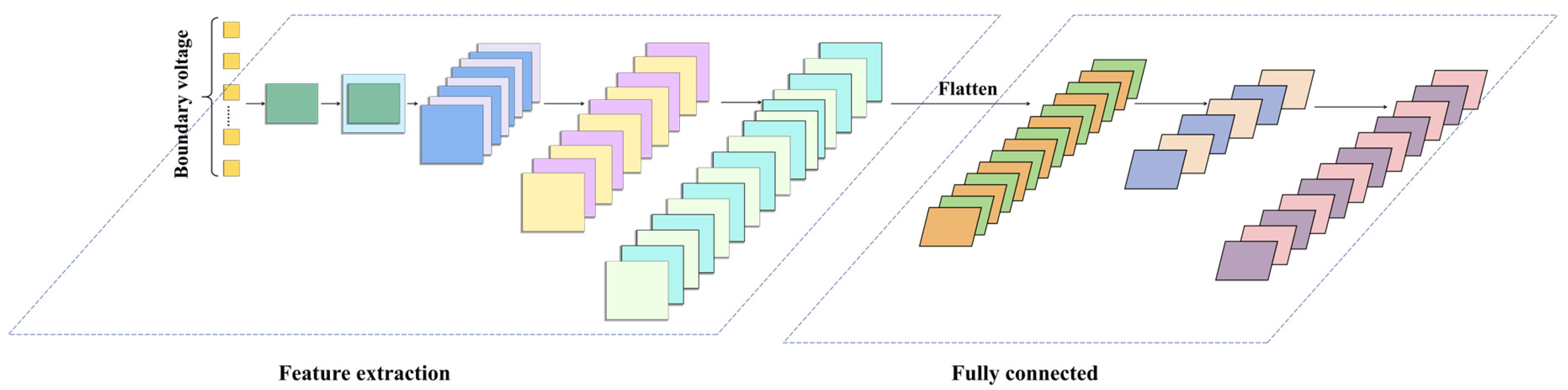
3.2.4. Network Algorithms and Models
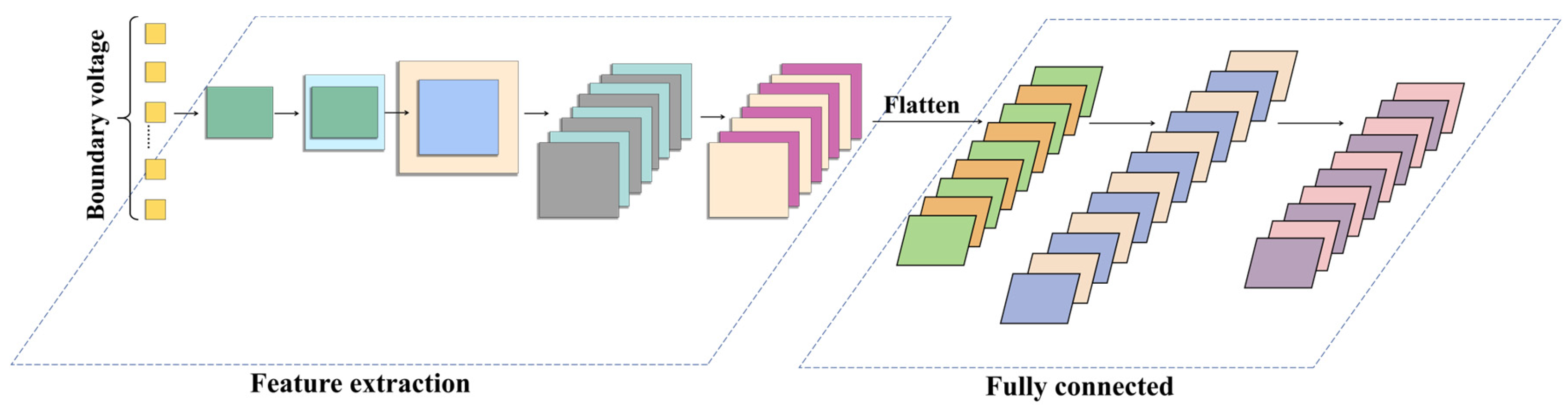
- CNN1
- 2.
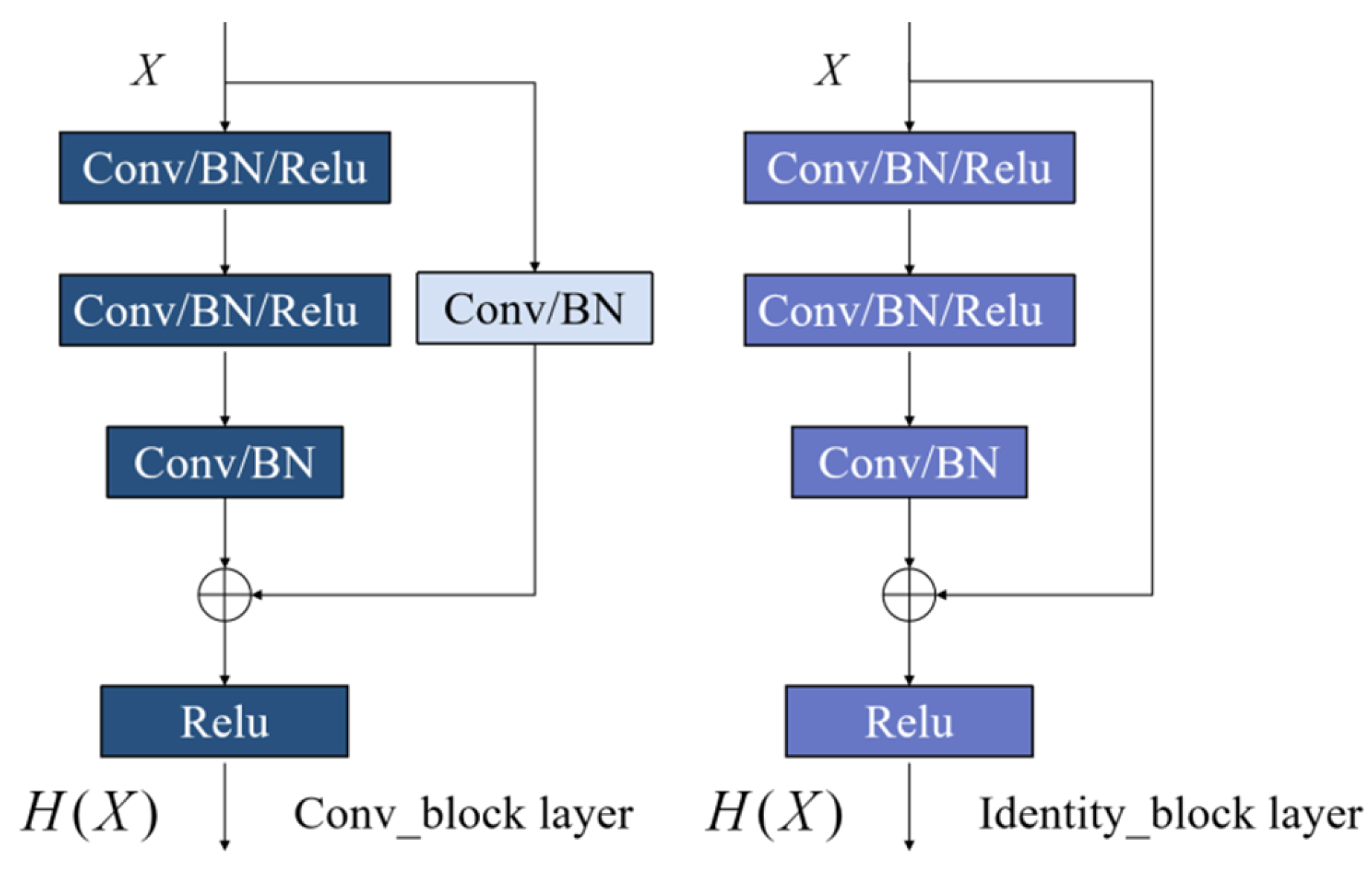
- ResNet2
- 3.
- RNN3
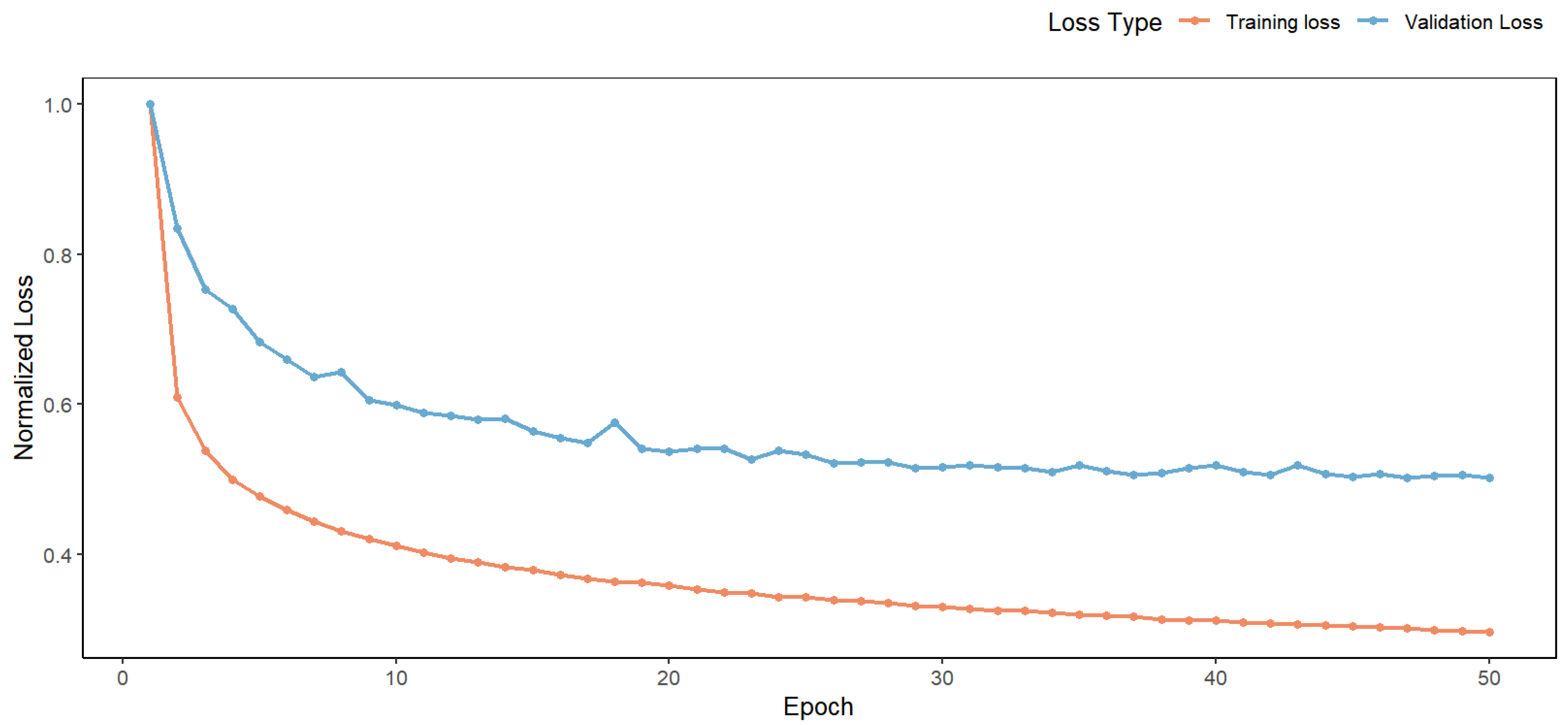
3.2.5. Network-Training-Related Parameter Settings
3.3. Model Evaluation Indicators
4. Results and Discussion
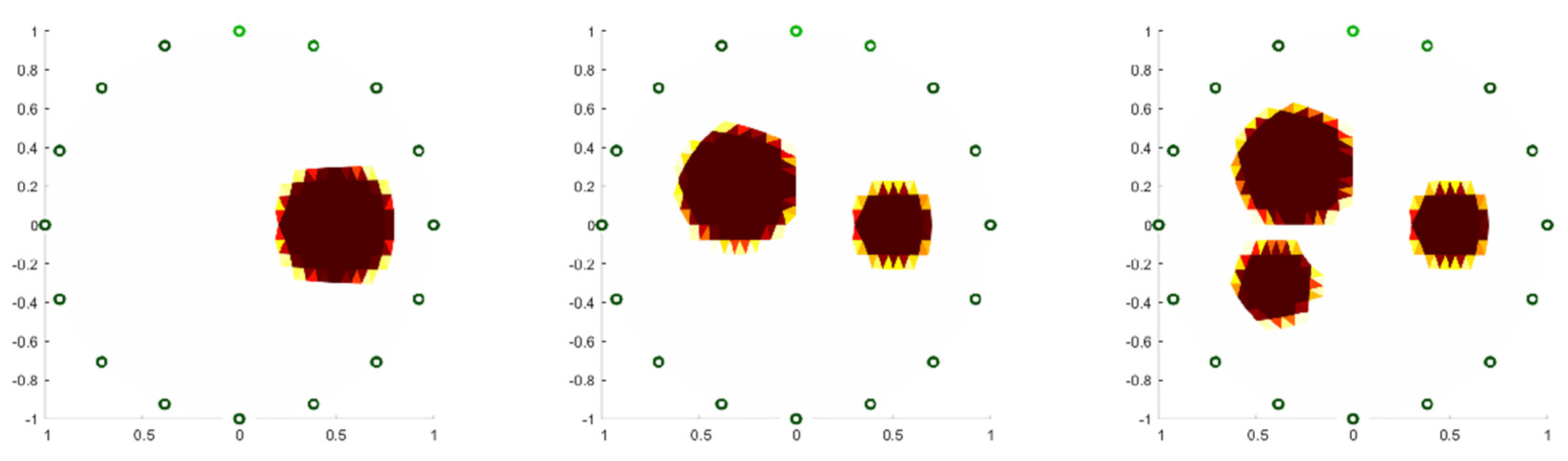
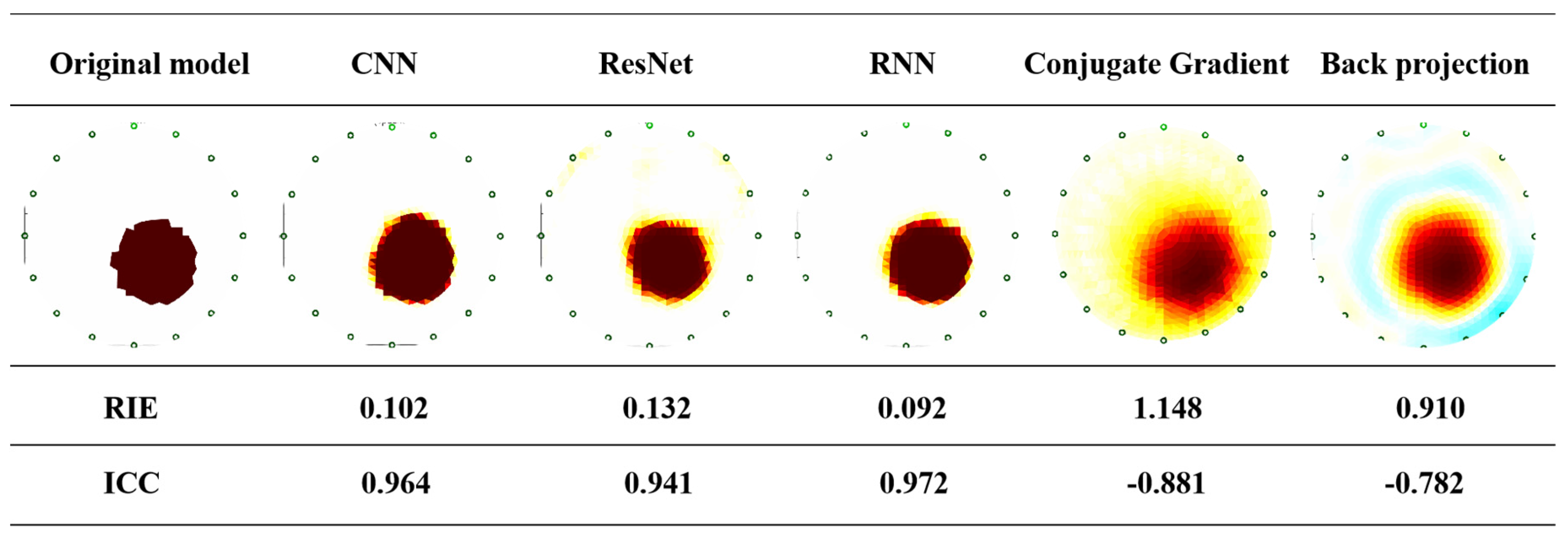
4.1. Comparison of Neural Networks and Traditional Image Reconstruction Algorithms for Recognizing a Single-Target Body
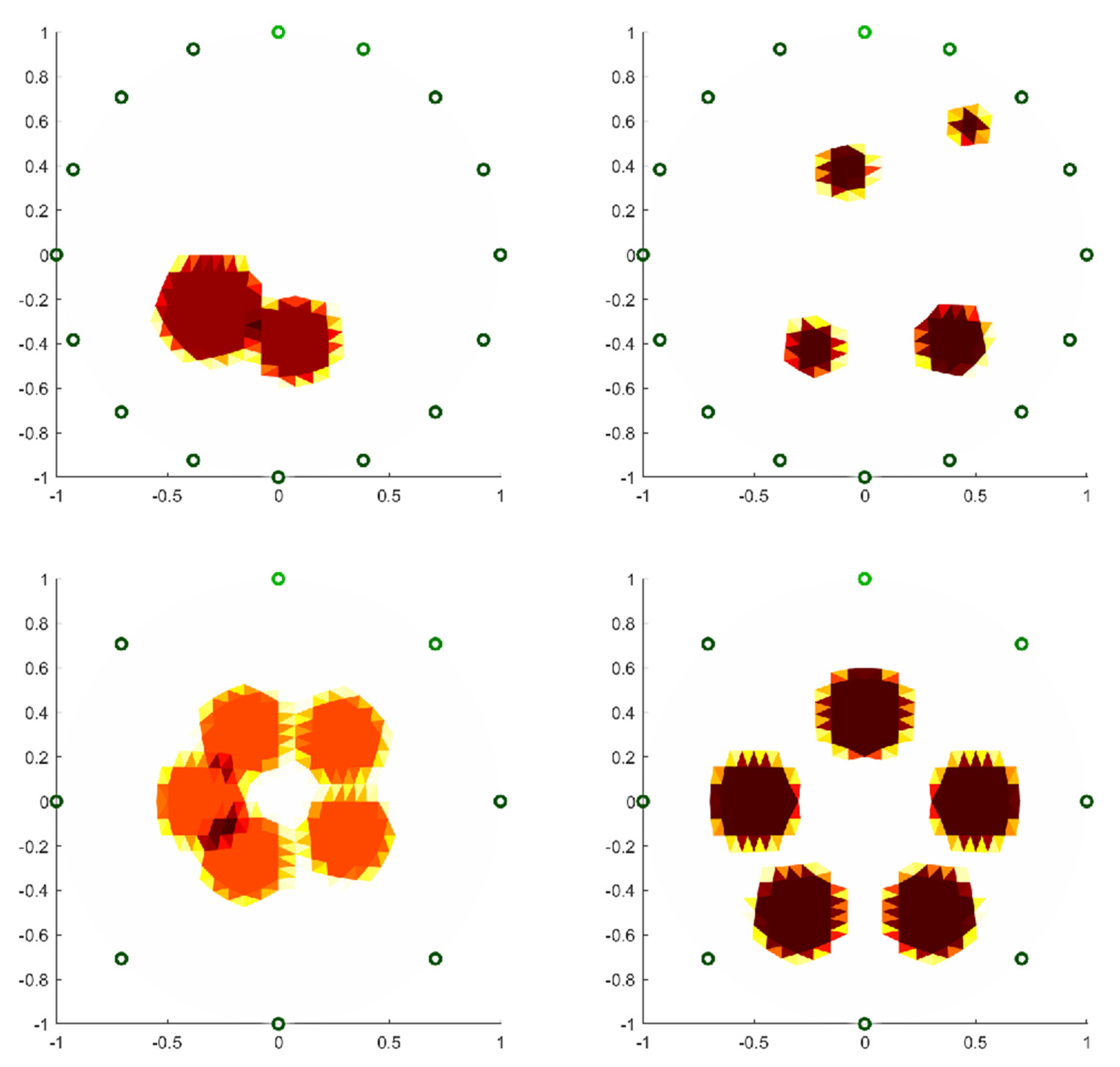
4.2. Comparison of Recognition Performances Between Neural Networks and Traditional Image Reconstruction Algorithms for Multiple Objects
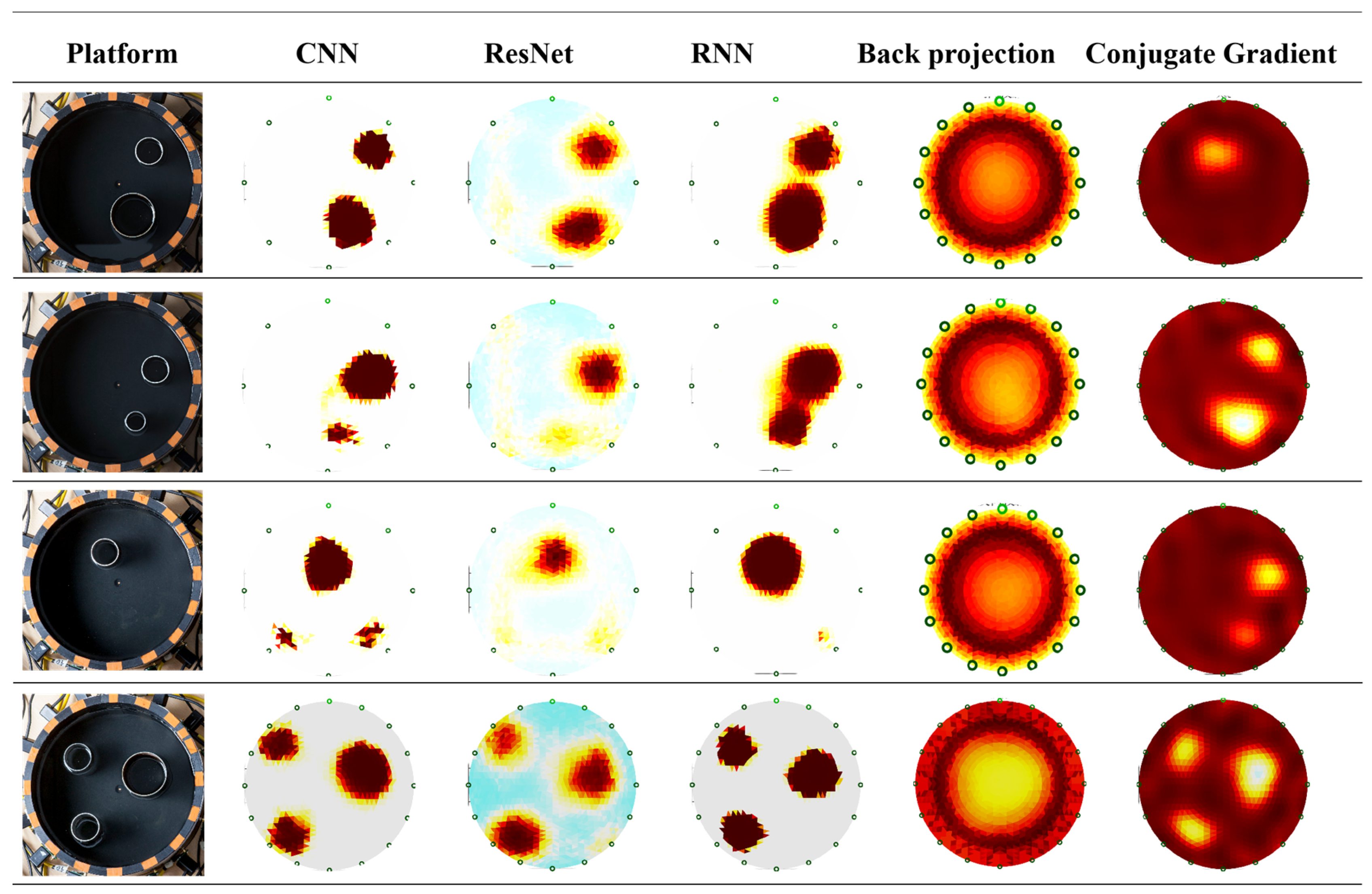
4.3. Phantom Experiment
5. Conclusions
- Designing a multi-electrode seabed simulation system based on ERT to measure dynamic data of hydrate formation.Design and assemble a multi-layer reactor suitable for ERT research, with embedded electrode plates for voltage measurements during hydrate formation, providing a data foundation for ERT imaging.
- Advancing ERT technology from 2D to 3D.By adjusting electrode placements, optimizing algorithmic structures, and developing more precise 3D ERT technology, the system can process large amounts of data more efficiently and generate high-precision resistivity distribution images.
- Exploring fusion strategies between neural networks and traditional image reconstruction algorithms.Using the results of traditional algorithms as input to neural networks, this study aims to leverage the prior information of traditional algorithms to enhance the learning capabilities of neural networks, thereby improving the model’s generalization and robustness across different experimental datasets.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
| 1 | CNN: Convolutional Neural Network. |
| 2 | Resnet: Residual Neural Network. |
| 3 | RNN: Recurrent Neural Network. |
References
- Wei, N.; Pei, J.; Li, H.; Zhou, S.; Zhao, J.; Kvamme, B.; Coffin, R.B.; Zhang, L.; Zhang, Y.; Xue, J. Classification of natural gas hydrate resources: Review, application and prospect. Gas Sci. Eng. 2024, 124, 205269. [Google Scholar] [CrossRef]
- Sloan, E.D. Fundamental principles and applications of natural gas hydrates. Nature 2003, 426, 353–359. [Google Scholar] [CrossRef] [PubMed]
- Suess, E.; Torres, M.E.; Bohrmann, G.; Collier, R.W.; Rickert, D.; Goldfinger, C.; Linke, P.; Heuser, A.; Sahling, H.; Heeschen, K.; et al. Sea Floor Methane Hydrates at Hydrate Ridge, Cascadia Margin. In Natural Gas Hydrates: Occurrence, Distribution, and Detection; AGU Publications: Washington, DC, USA, 2001; pp. 87–98. [Google Scholar]
- Song, Y.; Yang, L.; Yang, M. Natural gas hydrate, far beyond a vast resource of natural gas. Innov. Energy 2025, 2, 100074. [Google Scholar] [CrossRef]
- Teng, Y.; Zhang, D. Long-term viability of carbon sequestration in deep-sea sediments. Sci. Adv. 2018, 4, eaao6588. [Google Scholar] [CrossRef]
- White, C.M.; Strazisar, B.R.; Granite, E.; Hoffman, J.S.; Pennline, H.W. Separation and Capture of CO2 from Large Stationary Sources and Sequestration in Geological Formations—Coalbeds and Deep Saline Aquifers. J. Air Waste Manag. Assoc. 2003, 53, 645–715. [Google Scholar] [CrossRef]
- Li, M.; Rojas Zuniga, A.; Stanwix, P.L.; Aman, Z.M.; May, E.F.; Johns, M.L. Insights into CO2-CH4 hydrate exchange in porous media using magnetic resonance. Fuel 2022, 312, 122830. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, L.; Wang, J.; Zhao, J.; Dong, H.; Yang, M.; Liu, Y.; Song, Y. Enhanced CH4 recovery and CO2 storage via thermal stimulation in the CH4/CO2 replacement of methane hydrate. Chem. Eng. J. 2017, 308, 40–49. [Google Scholar] [CrossRef]
- Sun, L.; Meng, X.; Wang, J.; Li, G.; Kan, G.; Liu, B.; Lu, D. Research on the sediment acoustic properties based on a water coupled laboratory measurement system. Mar. Georesour. Geotechnol. 2019, 38, 595–603. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, K.; Song, Y.; Liu, W.; Lam, W.; Liu, Y.; Xue, K.; Zhu, Y.; Yu, X.; Li, Q. A Review on Research on Replacement of CH4 in Natural Gas Hydrates by Use of CO2. Energies 2012, 5, 399–419. [Google Scholar] [CrossRef]
- Koh, D.-Y.; Kang, H.; Lee, J.-W.; Park, Y.; Kim, S.-J.; Lee, J.; Lee, J.Y.; Lee, H. Energy-efficient natural gas hydrate production using gas exchange. Appl. Energy 2016, 162, 114–130. [Google Scholar] [CrossRef]
- Boswell, R.; Hancock, S.H.; Yamamoto, K.; Collett, T.S.; Pratap, M.; Lee, S.-R.J. Natural Gas Hydrates; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Kumar, A.; Maini, B.; Bishnoi, P.R.; Clarke, M.; Zatsepina, O.; Srinivasan, S. Experimental determination of permeability in the presence of hydrates and its effect on the dissociation characteristics of gas hydrates in porous media. J. Pet. Sci. Eng. 2010, 70, 114–122. [Google Scholar] [CrossRef]
- Lin, S.; Chang, X.; Wang, K.; Yang, C.; Guo, Y. Swelling damage characteristics induced by CO2 adsorption in shale: Experimental and modeling approaches. J. Rock Mech. Geotech. Eng. 2024; in press. [Google Scholar] [CrossRef]
- Rahman, M.J.; Fawad, M.; Chan Choi, J.; Mondol, N.H. Effect of overburden spatial variability on field-scale geomechanical modeling of potential CO2 storage site Smeaheia, offshore Norway. J. Nat. Gas Sci. Eng. 2022, 99, 104453. [Google Scholar] [CrossRef]
- Zhang, L.; Ge, K.; Wang, J.; Zhao, J.; Song, Y. Pore-scale investigation of permeability evolution during hydrate formation using a pore network model based on X-ray CT. Mar. Pet. Geol. 2020, 113, 104157. [Google Scholar] [CrossRef]
- Simonetti, A.; Knapp, J.H.; Sleeper, K.; Lutken, C.B.; Macelloni, L.; Knapp, C.C. Spatial distribution of gas hydrates from high-resolution seismic and core data, Woolsey Mound, Northern Gulf of Mexico. Mar. Pet. Geol. 2013, 44, 21–33. [Google Scholar] [CrossRef]
- Kuang, Y.; Zhang, L.; Zheng, Y. Enhanced CO2 sequestration based on hydrate technology with pressure oscillation in porous medium using NMR. Energy 2022, 252, 124082. [Google Scholar] [CrossRef]
- Hassanpouryouzband, A.; Joonaki, E.; Vasheghani Farahani, M.; Takeya, S.; Ruppel, C.; Yang, J.; English, N.; Schicks, J.; Edlmann, K.; Mehrabian, H.; et al. Gas hydrates in sustainable chemistry. Chem. Soc. Rev. 2020, 49, 5225–5309. [Google Scholar] [CrossRef]
- Geselowitz, D.B. An Application of Electrocardiographic Lead Theory to Impedance Plethysmography. IEEE Trans. Biomed. Eng. 1971, BME-18, 38–41. [Google Scholar] [CrossRef]
- Isaksen, O.; Nordtvedt, J.E. A new reconstruction algorithm for process tomography. Meas. Sci. Technol. 1993, 4, 1464. [Google Scholar] [CrossRef]
- Buddo, I.; Misyurkeeva, N.; Shelokhov, I.; Chuvilin, E.; Chernikh, A.; Smirnov, A. Imaging Arctic Permafrost: Modeling for Choice of Geophysical Methods. Geosciences 2022, 12, 389. [Google Scholar] [CrossRef]
- Priegnitz, M.; Thaler, J.; Spangenberg, E.; Schicks, J.M.; Abendroth, S. Spatial resolution of gas hydrate and permeability changes from ERT data in LARS simulating the Mallik gas hydrate production test. In EGU General Assembly Conference Abstracts; EGU General Assembly: Vienna, Austria, 2014. [Google Scholar]
- Li, Y.; Sun, H.; Meng, Q.; Liu, C.; Chen, Q.; Xing, L. 2-D electrical resistivity tomography assessment of hydrate formation in sandy sediments. Nat. Gas Ind. B 2020, 7, 278–284. [Google Scholar] [CrossRef]
- Zhao, J.; Liu, C.; Chen, Q.; Zou, C.; Liu, Y.; Bu, Q.; Kang, J.; Meng, Q. Experimental Investigation into Three-Dimensional Spatial Distribution of the Fracture-Filling Hydrate by Electrical Property of Hydrate-Bearing Sediments. Energies 2022, 15, 3537. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Q.; Li, S.; Wang, X.; Zhao, J.; Zou, C. Characterizing spatial distribution of ice and methane hydrates in sediments using cross-hole electrical resistivity tomography. Gas Sci. Eng. 2024, 128, 205378. [Google Scholar] [CrossRef]
- Zhou, B. Electrical Resistivity Tomography: A Subsurface-Imaging Technique. In Applied Geophysics with Case Studies on Environmental, Exploration and Engineering Geophysics; IntechOpen: London, UK, 2018. [Google Scholar]
- Mojica, A.; Pérez, T.; Toral, J.; Miranda, R.; Franceschi, P.; Calderón, C.; Vergara, F. Shallow electrical resistivity imaging of the Limón fault, Chagres River Watershed, Panama Canal. J. Appl. Geophys. 2017, 138, 135–142. [Google Scholar] [CrossRef]
- Ducut, J.D.; Alipio, M.; Go, P.J.; Concepcion, R., II; Vicerra, R.R.; Bandala, A.; Dadios, E. A Review of Electrical Resistivity Tomography Applications in Underground Imaging and Object Detection. Displays 2022, 73, 102208. [Google Scholar] [CrossRef]
- Aleardi, M.; Vinciguerra, A.; Hojat, A. A convolutional neural network approach to electrical resistivity tomography. J. Appl. Geophys. 2021, 193, 104434. [Google Scholar] [CrossRef]
- Huang, S.M.; Xie, C.G.; Beck, M.S.; Thorn, R.; Snowden, D. Design of sensor electronics for electrical capacitance tomography. IEE Proc. G (Circuits Devices Syst.) 1992, 139, 83–88. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, H.; Cui, Z.; Xu, Y.; Yang, C. Fast reconstruction of electrical resistance tomography (ERT) images based on the projected CG method. Flow Meas. Instrum. 2012, 27, 37–46. [Google Scholar] [CrossRef]
- Tan, C.; Lv, S.; Dong, F.; Takei, M. Image Reconstruction Based on Convolutional Neural Network for Electrical Resistance Tomography. IEEE Sens. J. 2019, 19, 196–204. [Google Scholar] [CrossRef]
- Yang, W.; Tan, C.; Dong, F. Electrical Resistance Tomography Image Reconstruction Based on Res2net4 Network. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 6459–6465. [Google Scholar]
- Ammaiappan, S.; Liang, G.; Tan, C.; Dong, F. A Priority-Based Adaptive Firefly Optimized Conv-BiLSTM Algorithm for Electrical Resistance Image Reconstruction. IEEE Sens. J. 2024, 24, 624–634. [Google Scholar] [CrossRef]
- Xiao, L.Q. Finite Element Model and Image Reconstruction Algorithm for Electrical Resistance Tomography; Finite Element Model and Image Reconstruction Algorithm for Electrical Resistance Tomography. Ph.D. Thesis, Tianjin University, Tianjin, China, 2014. (In Chinese). [Google Scholar]
- Rao, S. Electrical Impedance Tomography Image Reconstruction using MATLAB based freeware EIDORS. MATLAB Central File Exchange. 2025. Available online: https://www.mathworks.com/matlabcentral/fileexchange/59263-electrical-impedance-tomography-image-reconstruction-using-matlab-based-freeware-eidors (accessed on 15 June 2025).
- Wu, Y.; Tahmasebi, P.; Liu, K.; Lin, C.; Kamrava, S.; Liu, S.; Fagbemi, S.; Liu, C.; Chai, R.; An, S. Modeling the physical properties of hydrate-bearing sediments: Considering the effects of occurrence patterns. Energy 2023, 278, 127674. [Google Scholar] [CrossRef]
- Lyu, C.; Sun, Q.; Li, G.; Lyu, W.; Xie, P.; Hu, J.; Sun, W.; Cong, C. P-wave velocity evolution and interpretation of seepage mechanisms during CO2 hydrate formation in quartz sands: Perspective of hydrate pore habits. Energy 2024, 306, 132536. [Google Scholar] [CrossRef]
- Ye, J.; Wei, J.; Liang, J.; Lu, J.; Lu, H.; Zhang, W. Complex gas hydrate system in a gas chimney, South China Sea. Mar. Pet. Geol. 2019, 104, 29–39. [Google Scholar] [CrossRef]
- Kourunen, J.; Savolainen, T.; Lehikoinen, A.; Vauhkonen, M.; Heikkinen, L. Suitability of a PXI platform for an electrical impedance tomography system. Meas. Sci. Technol. 2008, 20, 015503. [Google Scholar] [CrossRef]
- Tong, W.G.; Zeng, S.C.; Zhang, L.F. Electrical Resistance Tomography and Flow Pattern Identification Method Based on Deep Residual Neural Network. J. Syst. Simul. 2022, 34, 2028–2036. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Mienye, I.D.; Swart, T.G.; Obaido, G.J.I. Recurrent Neural Networks: A Comprehensive Review of Architectures, Variants, and Applications. Information 2024, 15, 517. [Google Scholar] [CrossRef]
- Cho, K.; Merrienboer, B.v.; Gülçehre, Ç.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. In Proceedings of the Conference on Empirical Methods in Natural Language Processing, Doha, Qatar, 25–29 October 2014. [Google Scholar]
- Zuo, C.L.; Li, J. Study on Electrical Impedance Imaging Based on Hybrid Total Variation Regularization Algorithm. J. Sens. Microsyst. 2021, 40, 40–43+46. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Research Methods |
|---|---|
| Priegnitz et al., 2014 [23] | Three-dimensional electrical resistivity tomography is utilized to dynamically monitor the formation and dissociation processes of hydrates in a high-pressure low-temperature reservoir simulator (LARS). The measured data are subsequently processed using the inversion software tool Boundless to generate imaging results through inversion. |
| Li et al., 2020 [24] | Two-dimensional electrical resistivity tomography is used to monitor the formation process of hydrates in sandy sediments, and the ITS2000 industrial fault-scanning system is employed for imaging. |
| Zhao J. et al., 2022 [25] | Utilizing ERT technology, three-dimensional resistivity images of blocky and layered hydrates were established. It was found that the resistivity of blocky hydrates is significantly higher than that of layered hydrates, and their formation characteristics are influenced by the distribution of the pore water and the microstructure of hydrate pores. |
| Buddo et al., 2022 [22] | The integration of ERT with other geophysical methods, such as the transient electromagnetic method (TEM), improves the penetration depth and sensitivity to high-resistivity targets. |
| Liu et al., 2024 [26] | A cross-hole electrical resistivity tomography (CHERT) technique was designed to satisfy a wide range of resistivity measurements ranging from a few ohm-meters to thousands of ohm-meters, consistent with the resistivity responses of actual hydrate reservoirs. |
| Sample Type | One Heterostructure | Two Heterostructures | Three Heterostructures | Four Heterostructures | Five Heterostructures |
|---|---|---|---|---|---|
| Training Sample | 3000 | 3000 | 2000 | 3000 | 3000 |
| Validation Sample | 100 | 100 | 100 | 100 | 100 |
| Testing Sample | 1 | 1 | 1 | 1 | 1 |
| Step | Layer(s) | Output Size |
|---|---|---|
| Input | Reshaping + Zero Padding | (1, 18, 18, 1) |
| 1 | Conv2d/BN | (1, 18, 18, 64) |
| 2 | Conv2d/BN | (1, 18, 18, 256) |
| 3 | Conv2d/BN | (1, 2000) |
| 4 | Flattening | (1, 82, 944) |
| 5 | Fully connected | (1, 512) |
| 6 | Fully connected | (1, 1600) |
| Step | Layer(s) | Output Size |
|---|---|---|
| Input | Reshaping + Zero Padding + Upsampling/BN | (1, 36, 36, 1) |
| 1 | Conv2d/BN | (1, 17, 17, 16) |
| 2 | Conv_block layer/BN | (1, 17, 17, 16) |
| 3 | Flattening | (1, 4624) |
| 5 | Fully connected | (1, 1800) |
| 6 | Fully connected | (1, 1600) |
| Step | Layer | Output Size |
|---|---|---|
| Input | —— | (208, 1) |
| 1 | RNN × 16 | (208, 16) |
| 2 | Flattening | (1, 3328) |
| 3 | Fully connected | (1, 2000) |
| 4 | Fully connected | (1, 1600) |
| Computer Operating System | Windows 11 |
|---|---|
| Training framework | Keras |
| Number of training samples | 14,000 |
| Number of calibration samples | 500 |
| Batch_size | 64 |
| Learning rate | 0.01 |
| Total training rounds | 50 |
| Loss function | Binary cross-entropy |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Z.; Wang, Q.; Li, S.; Li, X.; Ye, J.; Zhang, Y.; Ye, H.; Kuang, Y.; Zheng, Y. Electrical Resistivity Tomography Methods and Technical Research for Hydrate-Based Carbon Sequestration. J. Mar. Sci. Eng. 2025, 13, 1205. https://doi.org/10.3390/jmse13071205
Lin Z, Wang Q, Li S, Li X, Ye J, Zhang Y, Ye H, Kuang Y, Zheng Y. Electrical Resistivity Tomography Methods and Technical Research for Hydrate-Based Carbon Sequestration. Journal of Marine Science and Engineering. 2025; 13(7):1205. https://doi.org/10.3390/jmse13071205
Chicago/Turabian StyleLin, Zitian, Qia Wang, Shufan Li, Xingru Li, Jiajie Ye, Yidi Zhang, Haoning Ye, Yangmin Kuang, and Yanpeng Zheng. 2025. "Electrical Resistivity Tomography Methods and Technical Research for Hydrate-Based Carbon Sequestration" Journal of Marine Science and Engineering 13, no. 7: 1205. https://doi.org/10.3390/jmse13071205
APA StyleLin, Z., Wang, Q., Li, S., Li, X., Ye, J., Zhang, Y., Ye, H., Kuang, Y., & Zheng, Y. (2025). Electrical Resistivity Tomography Methods and Technical Research for Hydrate-Based Carbon Sequestration. Journal of Marine Science and Engineering, 13(7), 1205. https://doi.org/10.3390/jmse13071205