Hydrodynamic Calculation and Analysis of a Complex-Shaped ROV Moving near the Wall Based on CFDs


Abstract
1. Introduction
2. Structure and Hydrodynamic Model of ROV
2.1. Structure
2.2. Hydrodynamic Model
3. Numerical Simulation Methods and Model Validation
3.1. Governing Equations
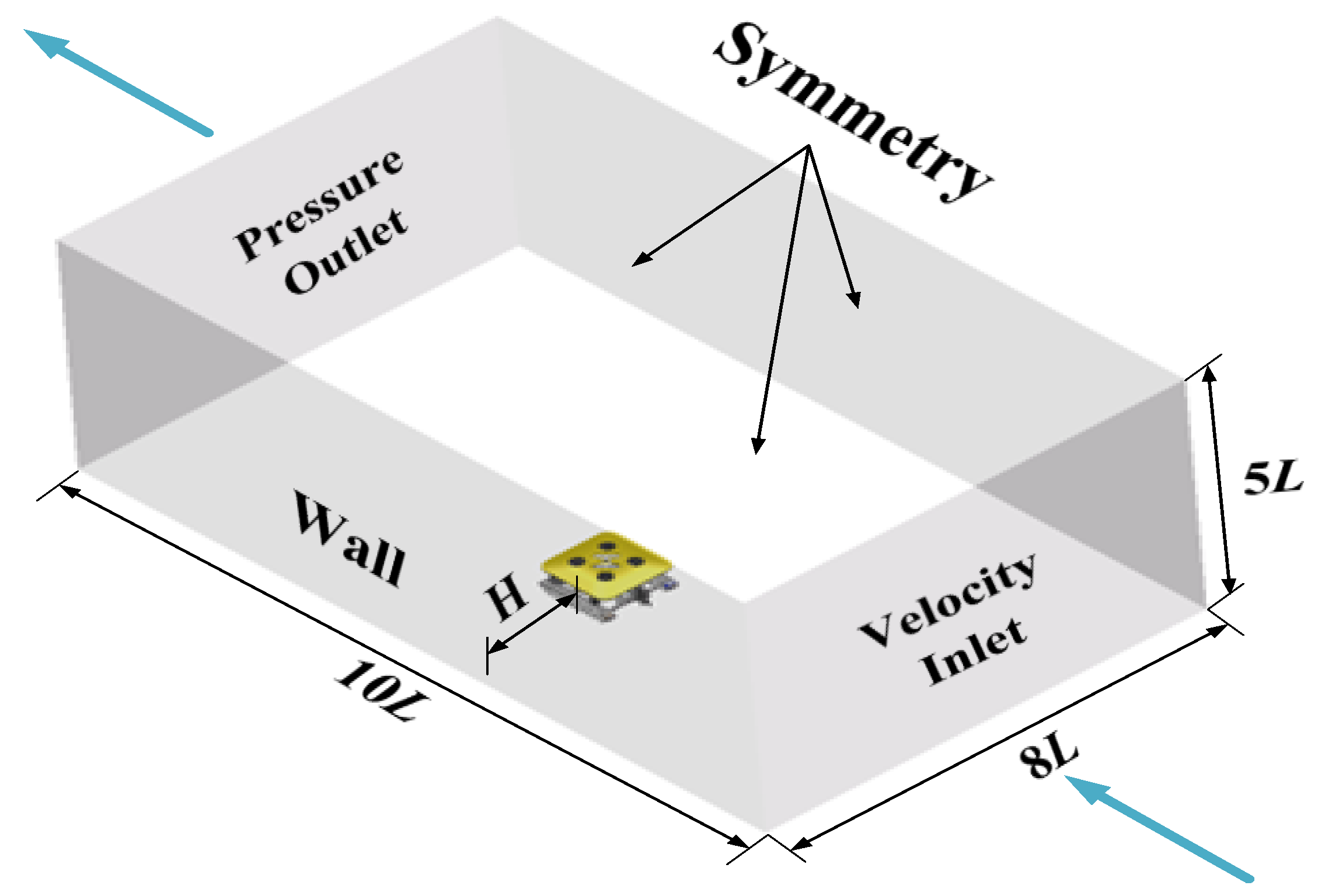
3.2. Computational Model
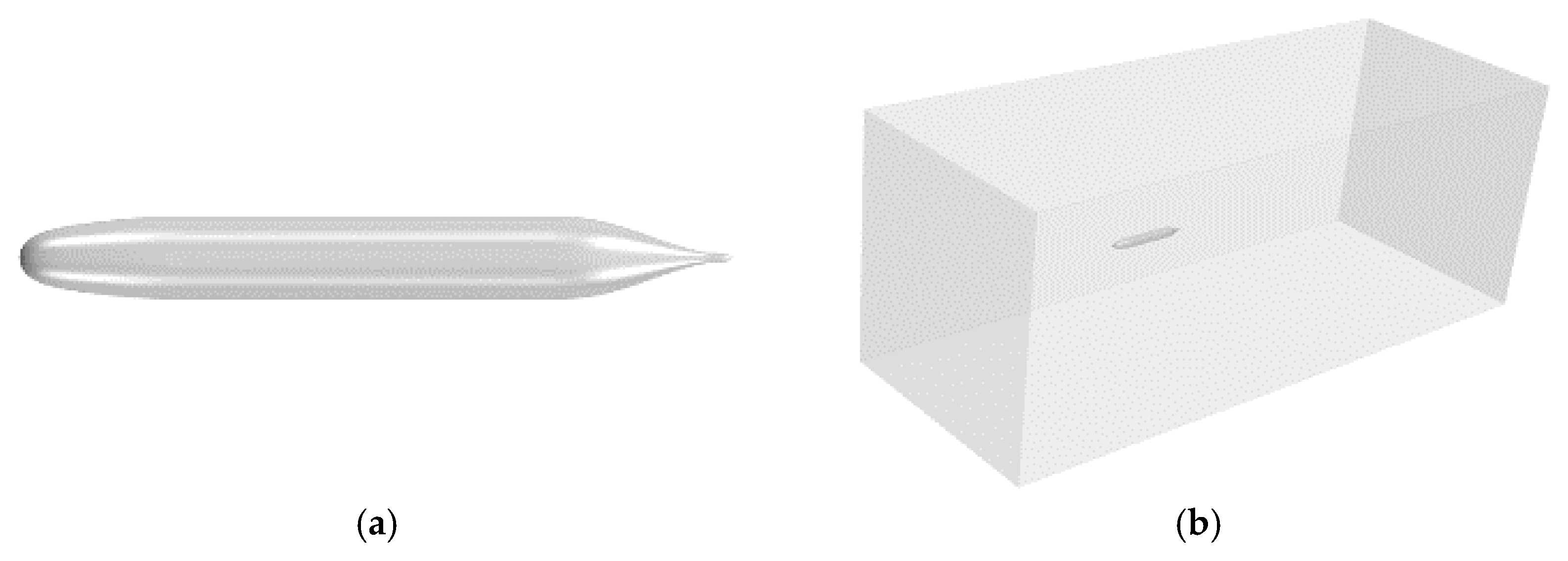
3.3. Grid Generation
3.4. Validation of the CFDs Method
4. Wall Hydrodynamic Calculation and Model Establishment for the Complex-Shaped ROV
4.1. Calculation Condition
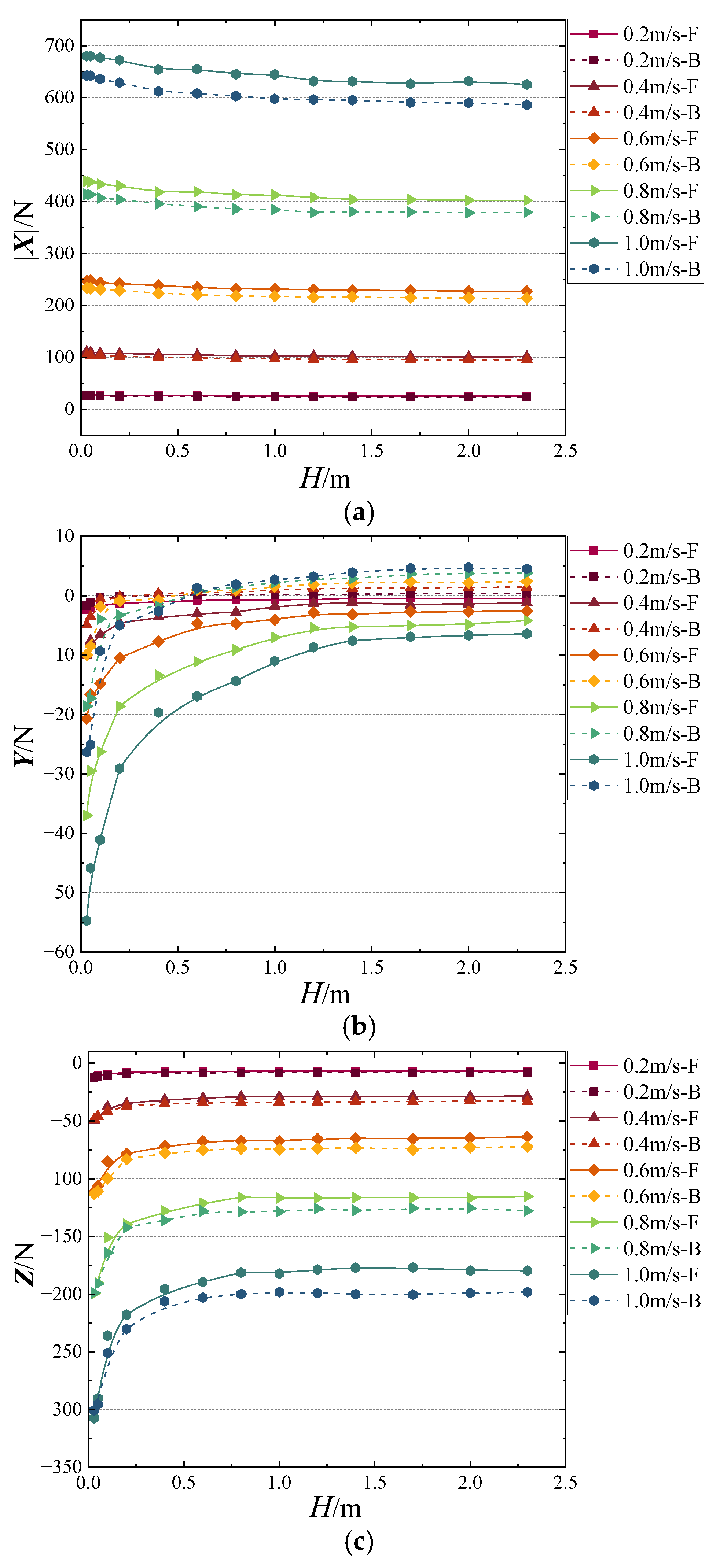
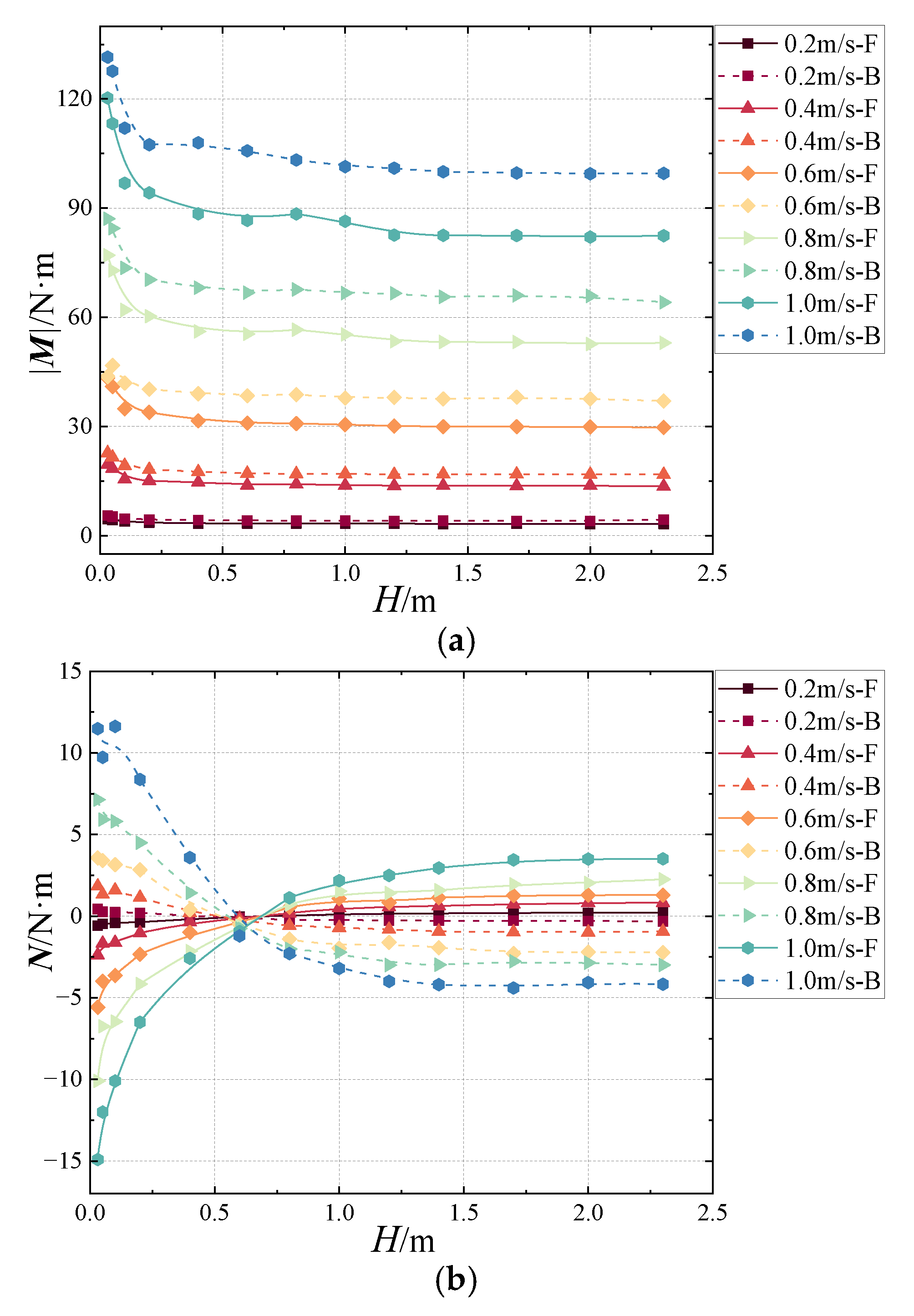
4.2. Calculation Results and Analysis

4.3. Wall Hydrodynamic Mathematical Model
- Baseline simulation: perform a simulation of the rotation maneuver using the original set of coefficients without any perturbations and save the resulting data as the baseline reference.
- Coefficient perturbation: Select a specific coefficient, denoted as ci, and perturb its value by increasing it to (100 + Δ)% of its original value, where Δ = 10%. Then, simulate the rotation maneuver again under these modified conditions.
- Restoration: restore ci back to its original value to ensure consistency in subsequent steps.
- Repetition: repeat steps (2)–(3) for each coefficient in the model, saving the results for comparison.
- Error calculation: compute the sum of the squares of the differences between the unperturbed baseline data (from step 1) and the perturbed data (from step 2) over the entire simulation time, .
- Baseline Variance: calculate the sum of the squares of the unperturbed baseline data over the simulation time, .
- Sensitivity Index: divide the result from step (5) by the result from step (6) to obtain the sensitivity index for the coefficient under consideration.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, M.; Zhou, H.; Gong, L. Comprehensive Review of ROV Underwater Obstacle Detection and Avoidance Technology. Comput. Eng. Appl. 2024, 60, 34–47. [Google Scholar]
- Jiang, Z.; Zhao, Y.; Huang, J.; Wang, F.; Chen, Y.; Luo, C.; Luo, G. Development and trends of underwater robots for inspection, maintenance and repair for offshore oil and gas platforms: A review. Sci. Technol. Rev. 2024, 42, 6–15. [Google Scholar]
- McLean, D.L.; Partridge, J.C.; Bond, T.; Birt, M.J.; Bornt, K.R.; Langlois, T.J. Using industry ROV videos to assess fish associations with subsea pipelines. Cont. Shelf Res. 2017, 141, 76–97. [Google Scholar] [CrossRef]
- Zhu, A.J.; Ying, L.M.; Zheng, H. Resistance test method on underwater vessel operating close to the bottom or the surface. J. Ship Mech. 2012, 16, 368–374. [Google Scholar]
- Dunbabin, M.; Roberts, J.; Usher, K.; Winstanley, G.; Corke, P. A hybrid AUV design for shallow water reef navigation. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2105–2110. [Google Scholar]
- Valencia, R.A.; Ramirez, J.A.; Gutierrez, L.B.; Garcia, M.J. Modeling and simulation of an underwater remotely operated vehicle (ROV) for surveillance and inspection of port facilities using CFD tools. In Proceedings of the 27th International Conference on Offshore Mechanics and Archtic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 4, pp. 329–338. [Google Scholar]
- Ramírez-Macías, J.A.; Brongers, P.; Rúa, S.; Vásquez, R.E. Hydrodynamic modelling for the remotely operated vehicle Visor3 using CFD. IFAC PapersOnLine 2016, 49, 187–192. [Google Scholar] [CrossRef]
- Katsui, T.; Kajikawa, S.; Inoue, T. Numerical investigation of flow around a rov with crawler based driving system. In Proceedings of the ASME 31st International Conference on Ocean, Offshore and Artic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012; Volume 7, pp. 23–30. [Google Scholar]
- Baital, M.; Mangkusasmito, F.; Rahmawaty, M.A. Specification Design and Performances Using Computational Fluid Dynamics for Mini-Remotely Operated Underwater Vehicle. Ultim. Comput. J. Sist. Komputer. 2022, 14, 20–27. [Google Scholar] [CrossRef]
- Rumson, A.G. The application of fully unmanned robotic systems for inspection of subsea pipelines. Ocean. Eng. 2021, 235, 109214. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, X.; Huang, H. Development of an autonomous underwater helicopter with high maneuverability. Appl. Sci. 2019, 9, 4072. [Google Scholar] [CrossRef]
- Du, X.X.; Wang, H.; Hao, C.Z. Analysis of hydrodynamic characteristics of unmanned underwater vehicle moving close to the sea bottom. Def. Technol. 2014, 10, 76–81. [Google Scholar] [CrossRef]
- Mitra, A.; Pandal, J.P.; Warrior, H.V. Experimental and numerical investigation of the hydrodynamic characteristics of Autonomous Underwater Vehicles over sea-beds with complex topography. Ocean. Eng. 2019, 198, 106978. [Google Scholar] [CrossRef]
- Li, Z.; Tao, J.; Sun, H. Hydrodynamic calculation and analysis of a complex-shaped underwater robot based on computational fluid dynamics and prototype test. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Li, X.D.; Hu, Y.L.; Mao, Z.Y.; Tian, W.L. Numerical Simulation of the Hydrodynamic Performance and Self-Propulsion of a UUV near the Seabed. Appl. Sci. 2022, 12, 6975. [Google Scholar] [CrossRef]
- Wu, B.S.; Xing, F.; Kuang, X.F.; Miao, Q.M. Investigation of hydrodynamic characteristics of submarine moving close to the sea bottom with CFD methods. J. Ship Mech. 2005, 9, 19–28. (In Chinese) [Google Scholar]
- Xu, S.J.; Han, D.F.; Ma, Q.W. Hydrodynamic forces and moments acting on a remotely operate vehicle with an asymmetric shape moving in a vertical plane. Eur. J. Mech.—B/Fluids 2022, 54, 1–9. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, B.; Zhang, Y.; Zhou, N. Numerical simulation of hydrodynamics of ocean-observation-used remotely operated vehicle. Front. Mar. Sci. 2024, 11, 1357144. [Google Scholar] [CrossRef]
- Zan, Y.F.; Guo, R.N.; Yuan, L.H.; Wang, S.P.; Zhang, D.Z.; Xu, S.J.; Wu, Z.H. Experimental and numerical investigations on the hydrodynamic characteristics of the planar motion of an open-frame remotely operated vehicle. J. Mar. Sci. Technol. 2020, 28, 471–479. [Google Scholar]
- SNAME. Nomenclature for Treating the Motion of a Submerged Body Through a Fluid; Technical Report Bulletin; Society of Naval Architects and Marine Engineers: New York, NY, USA, 1950; Volume 1–5. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Jiang, M.J.; Chen, C.H.; Zhang, L.B. Establishment of hydrodynamic model and research on motion simulation of the open-frame ROV. Chin. J. Ship Res. 2024, 1673–3185. [Google Scholar] [CrossRef]
- Menter, F.R. Performance of popular turbulence models for attached and separated adverse pressure gradient flows. AIAA J. 1992, 30, 2066–2072. [Google Scholar] [CrossRef]
- Solkeun, J.; Jongwook, J.; Ray, S.L. Toward Cost-Effective Boundary Layer Transition Computations with Large-Eddy Simulation. J. Fluids Eng. 2018, 140, 111201. [Google Scholar]
- Huang, T.; Liu, H.L. Measurements of Flows over an Axisymmetric Body with Various Appendages in a Wind Tunnel: The DARPA SUBOFF Experimental Program. In Proceedings of the 19th Symposium on Naval Hydrodynamics, Seoul, Republic of Korea, 23–28 August 1992; National Academy Press: Washington, DC, USA, 1994. Session V. p. 321. [Google Scholar]
- Farhad, S.; Mansour, R.; Mohammad, D. Estimation of hydrodynamic coefficients and simplification of the depth model of an AUV using CFD and sensitivity analysis. Ocean Eng. 2022, 263, 112369. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree of Freedom | Positions and Euler Angles | Linear and Angular Velocity | Forces and Moments |
|---|---|---|---|
| 1 (Surge) | x (m) | u (m/s) | X (N) |
| 2 (Sway) | y (m) | v (m/s) | Y (N) |
| 3 (Heave) | z (m) | w (m/s) | Z (N) |
| 4 (Roll) | ϕ (rad) | p (rad/s) | K (N·m) |
| 5 (Pitch) | θ (rad) | q (rad/s) | M (N·m) |
| 6 (Yaw) | ψ (rad) | r (rad/s) | N (N·m) |
| Speed (m/s) | Our Results (N) | Experimental Results (N) | Error (%) |
|---|---|---|---|
| 3.046 | 85.13 | 87.4 | 2.6 |
| 5.144 | 232.54 | 242.2 | 4.0 |
| 6.091 | 328.96 | 332.9 | 1.2 |
| 7.161 | 445.88 | 451.5 | 1.2 |
| 8.231 | 558.62 | 576.9 | 3.2 |
| Motion Direction | Primary Factors | Conditions | Case Number |
|---|---|---|---|
| Horizontal plane | The wall distances (H/m) | 0.03, 0.05, 0.1, 0.2, 0.4, 0.6, 0.8, 1.0, 1.2, 1.4, 1.7, 2.0, 2.3 | 130 |
| The flow velocities (u/m·s−1) | ±0.2, ±0.4, ±0.6, ±0.8, ±1.0 | ||
| Vertical plane | The wall distances (H/m) | 0.03, 0.05, 0.1, 0.2, 0.4, 0.6, 0.8, 1.0, 1.2, 1.4, 1.7, 2.0, 2.3 | 130 |
| The flow velocities (w/m·s−1) | ±0.2, ±0.4, ±0.6, ±0.8, ±1.0 |
| WXu|u| | WXuH | WXuuuH | WXuuuHH | WXww | WXwH | WXwww | WXwwH |
| −52.25 | 7.98 | 52.80 | −16.60 | −4.82 | 5.47 | −6.74 | 2.78 |
| WYuu | WYuuH | WYuuHH | WYw | WYH | WYww | WYwH | WYwww |
| −35.85 | 75.37 | −53.03 | −56.49 | 18.43 | −110.17 | 88.69 | −28.23 |
| WZuu | WZuuH | WZuuHH | WZuuHHH | WZw | WZwww | WZwHH | WYwwH |
| −102.11 | 278.34 | −218.72 | 51.49 | −102.11 | −110.04 | 19.60 | 52.94 |
| WMuuu | WMuuuH | WMuuuHH | WMw | WMww | WMwH | WMwww | WMwwH |
| 22.63 | −36.53 | 11.79 | −2.27 | −4.33 | 5.67 | −4.25 | 1.95 |
| WNuuu | WNuuuH | WNuuuHH | WNwww | WNwwwH | WMwHH | ||
| −20.02 | 22.83 | −6.98 | −0.93 | 0.95 | −1.57 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Chen, C.; Suo, Z.; Dong, Y. Hydrodynamic Calculation and Analysis of a Complex-Shaped ROV Moving near the Wall Based on CFDs. J. Mar. Sci. Eng. 2025, 13, 1183. https://doi.org/10.3390/jmse13061183
Jiang M, Chen C, Suo Z, Dong Y. Hydrodynamic Calculation and Analysis of a Complex-Shaped ROV Moving near the Wall Based on CFDs. Journal of Marine Science and Engineering. 2025; 13(6):1183. https://doi.org/10.3390/jmse13061183
Chicago/Turabian StyleJiang, Mengjie, Chaohe Chen, Zhijia Suo, and Yingkai Dong. 2025. "Hydrodynamic Calculation and Analysis of a Complex-Shaped ROV Moving near the Wall Based on CFDs" Journal of Marine Science and Engineering 13, no. 6: 1183. https://doi.org/10.3390/jmse13061183
APA StyleJiang, M., Chen, C., Suo, Z., & Dong, Y. (2025). Hydrodynamic Calculation and Analysis of a Complex-Shaped ROV Moving near the Wall Based on CFDs. Journal of Marine Science and Engineering, 13(6), 1183. https://doi.org/10.3390/jmse13061183