
Spatial Trajectory Tracking of Underactuated Autonomous Underwater Vehicles by Model–Data-Driven Learning Adaptive Robust Control

Abstract
1. Introduction
- (1)
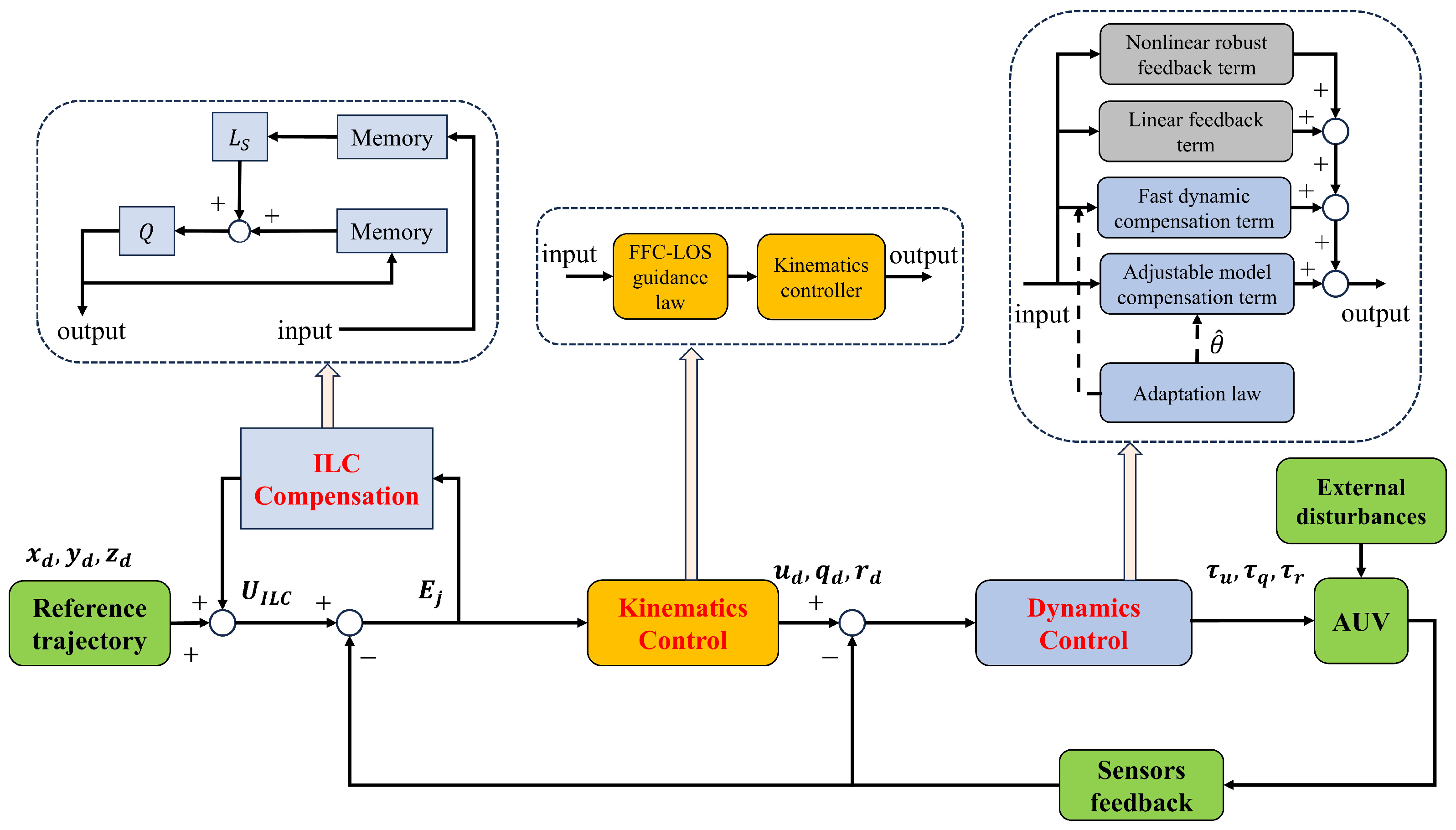
- The serial ILC is introduced as feedforward compensation control, and the corresponding trajectory tracking error dynamics, Feedforward Compensation–Line of Sight (FFC-LOS) guidance law, and feedforward compensation-based kinematics controller are proposed, which can significantly improve trajectory tracking performance for repetitive tasks in 3D space.
- (2)
- In order to solve the problem of uncertain dynamics parameters, the projection-type adaptation law with rate limits is applied, and the parameter estimation process is designed based on the least squares estimation technique. The nonlinear robust feedback control and fast dynamic compensation term are designed to deal with the nonlinear complex external disturbances.
- (3)
- The proposed LARC strategy for underactuated AUVs includes the data-driven ILC feedforward part, the adaptive control part, and the robust control and fast dynamic compensation part, using the advantages of both model-based control and data-driven control. The stability of the kinematics controller and dynamics controller are ensured by Lyapunov analysis. The effectiveness of the proposed control strategy is verified by comparison and multi-case study.
2. Modeling and Control Objective
2.1. Mathematical Models of Underactuated AUV
2.2. Control Objective
3. Controller Design
3.1. ILC Part in Kinematics Controller
3.2. Trajectory Tracking Error Dynamics Model
3.3. Kinematics Controller Design
3.4. Dynamics Controller Design
3.4.1. Parameter Adaptation Law
3.4.2. Velocity Tracking Controller Design
4. Simulation Study
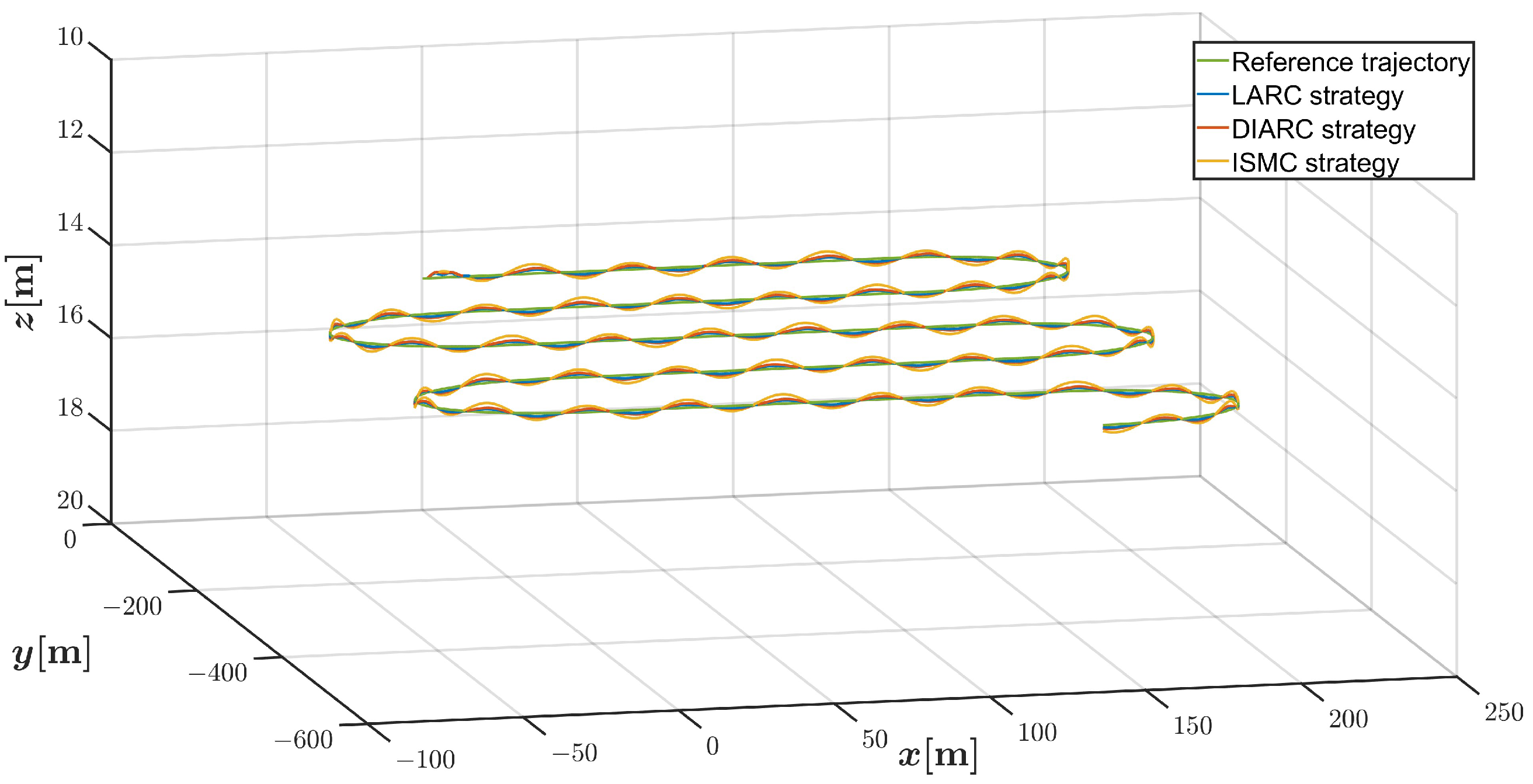
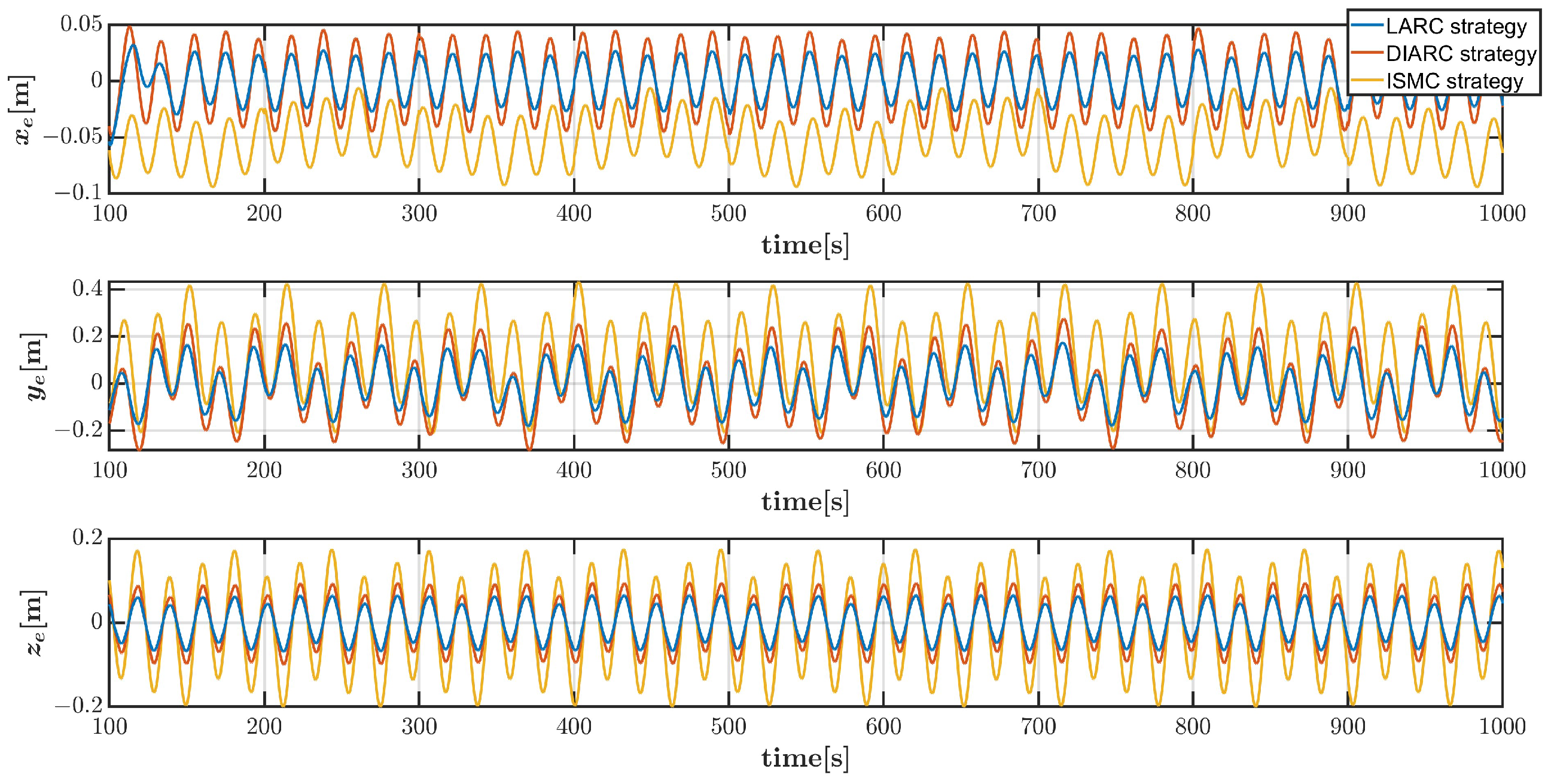
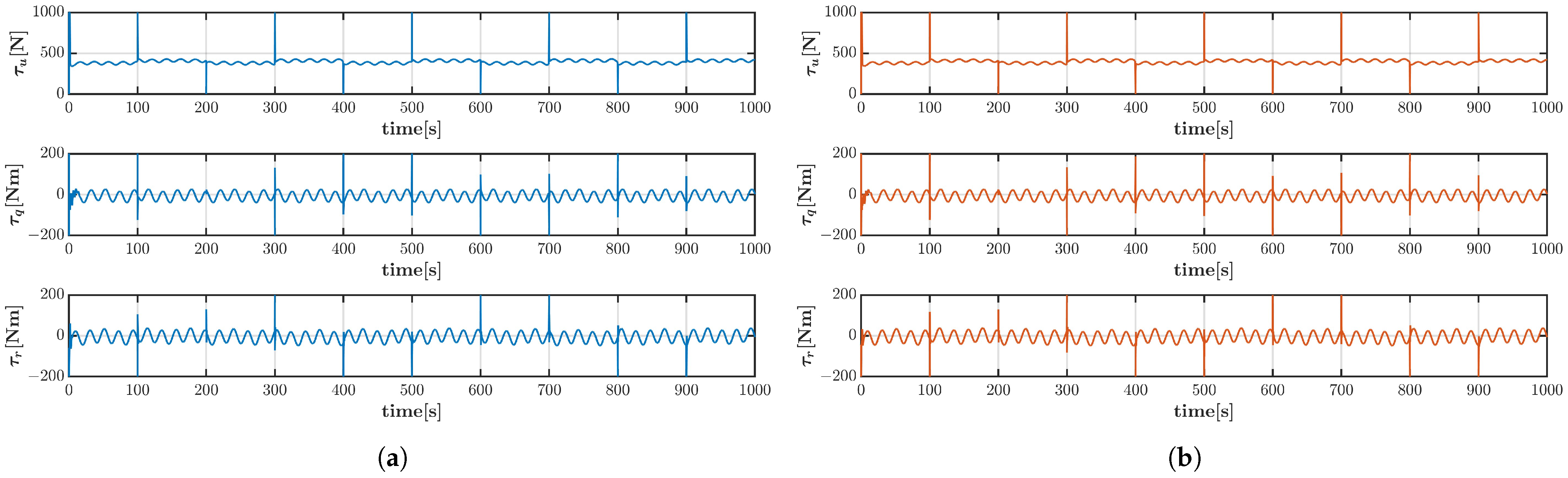
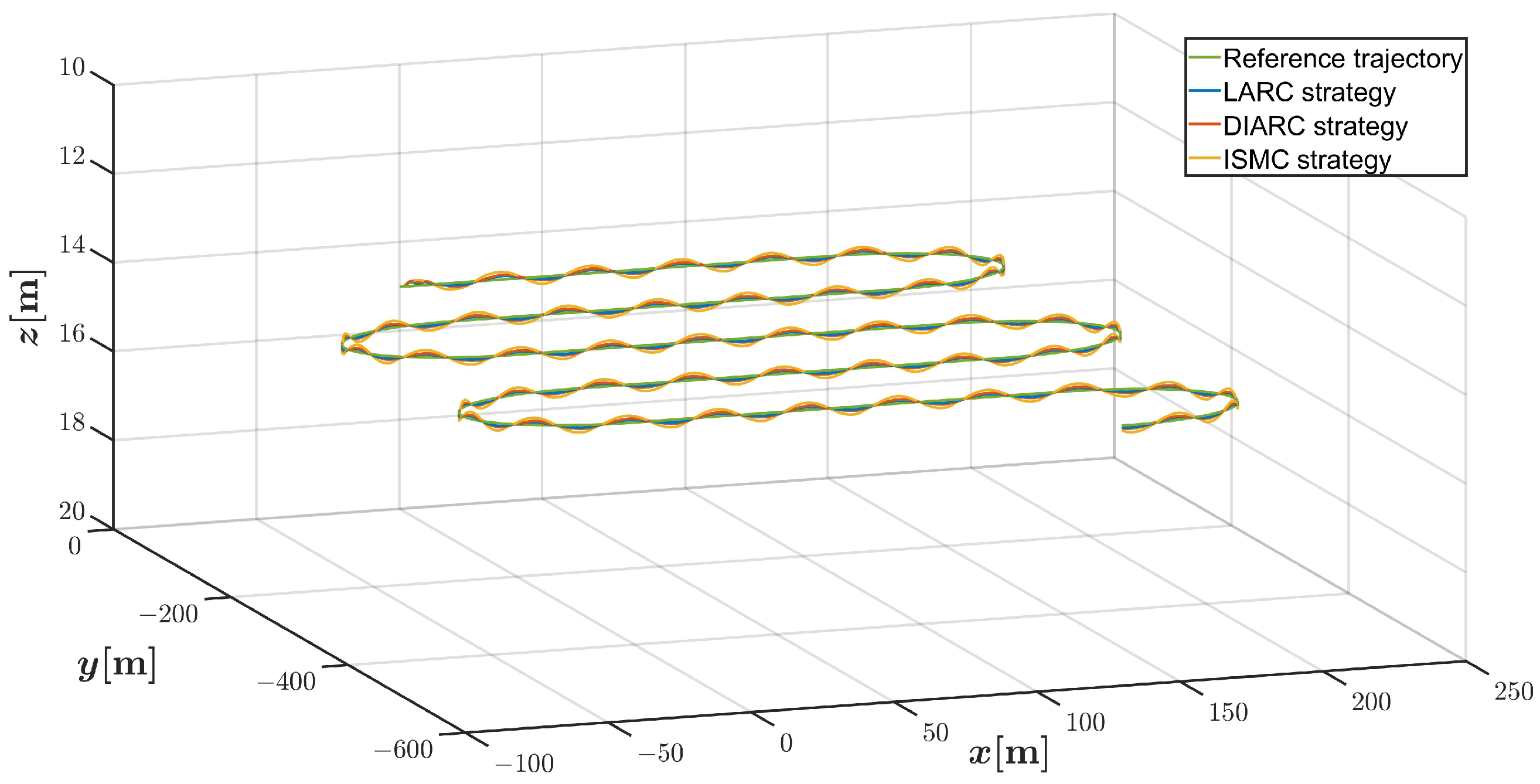
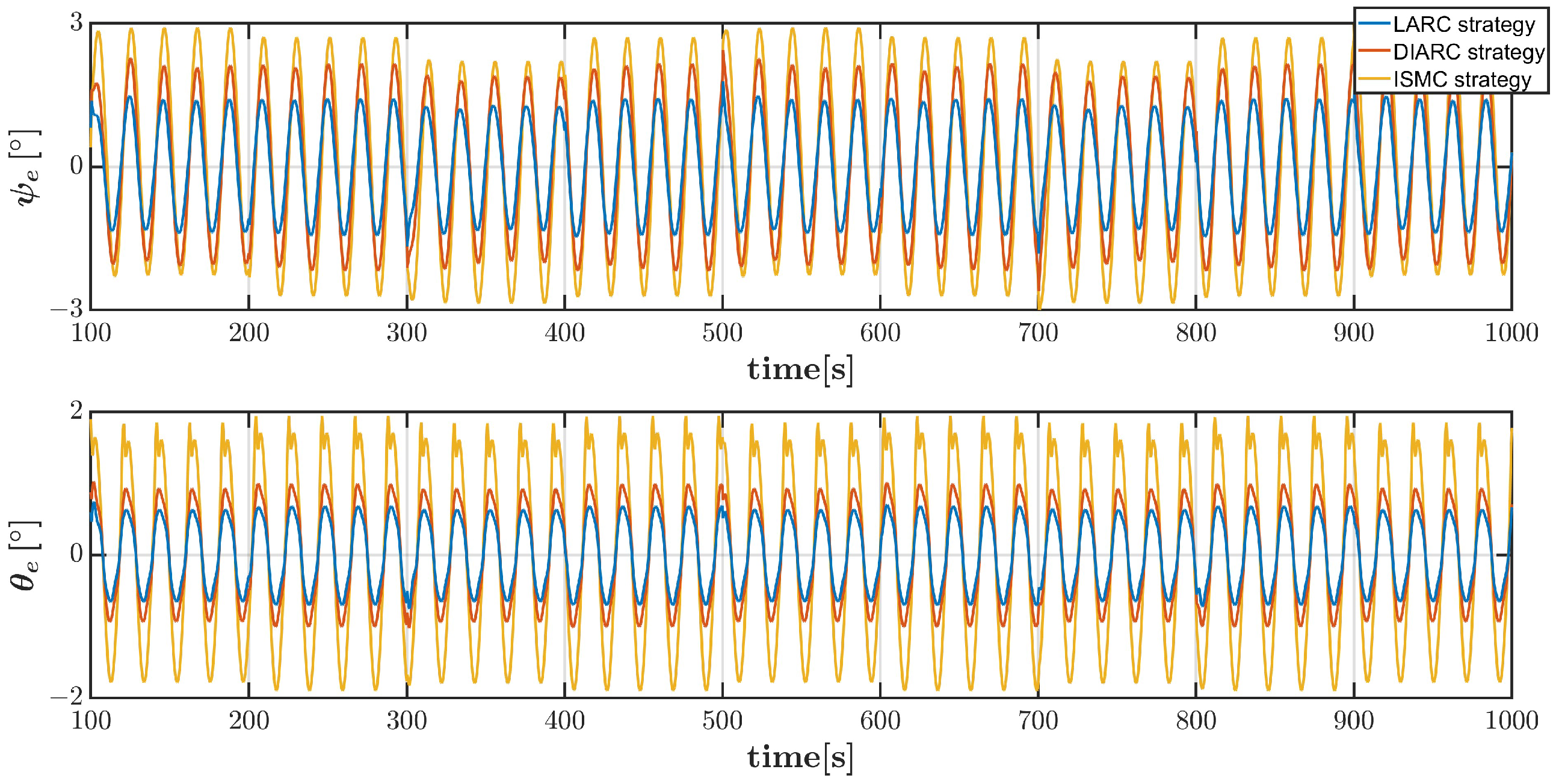
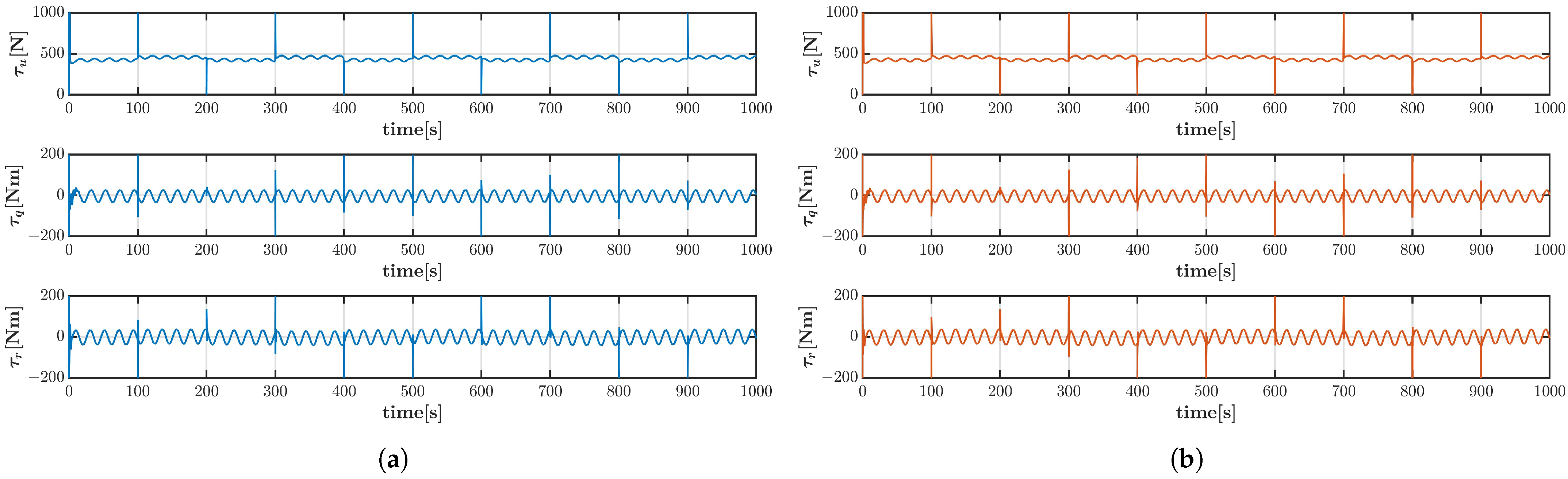
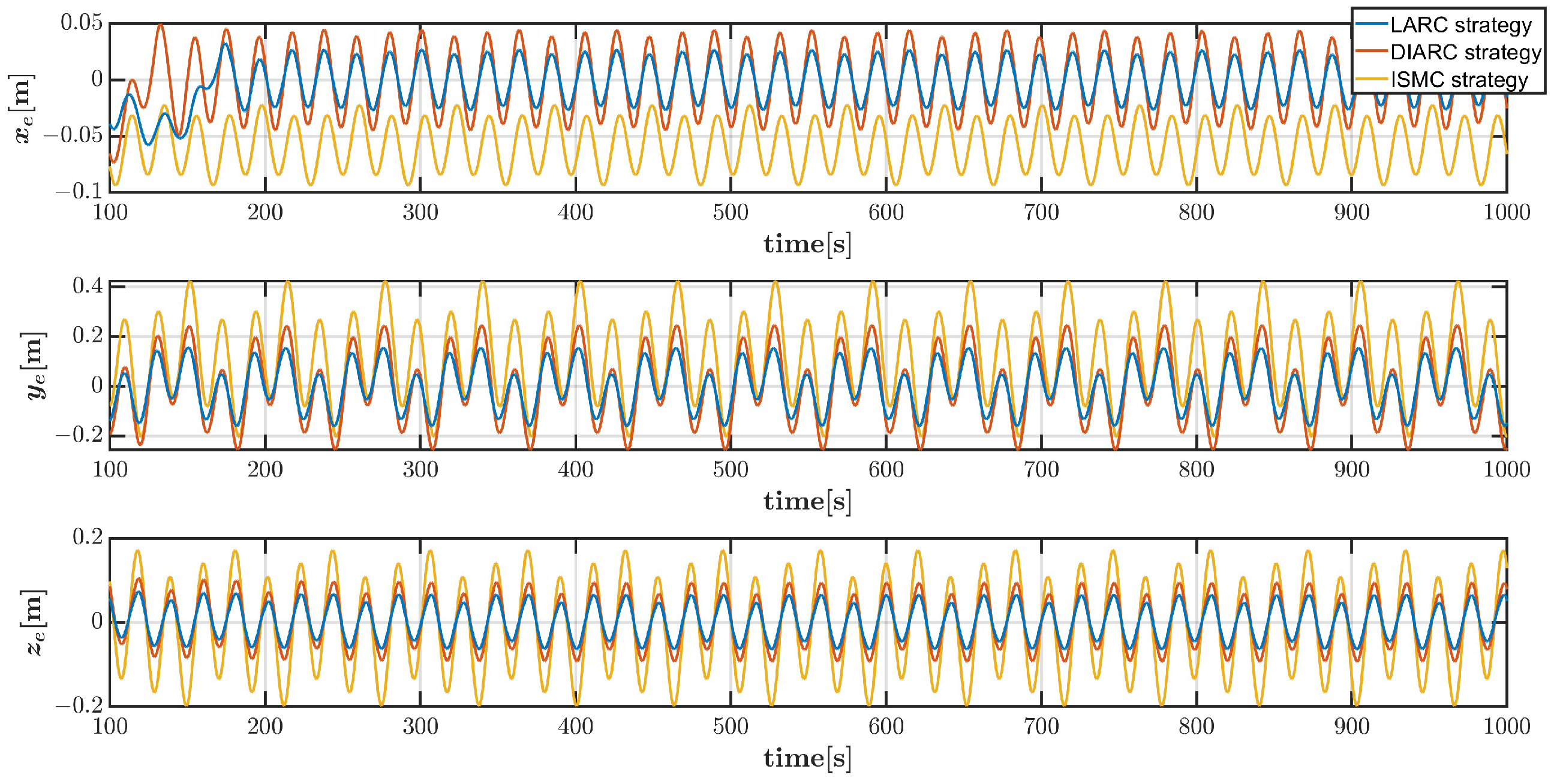
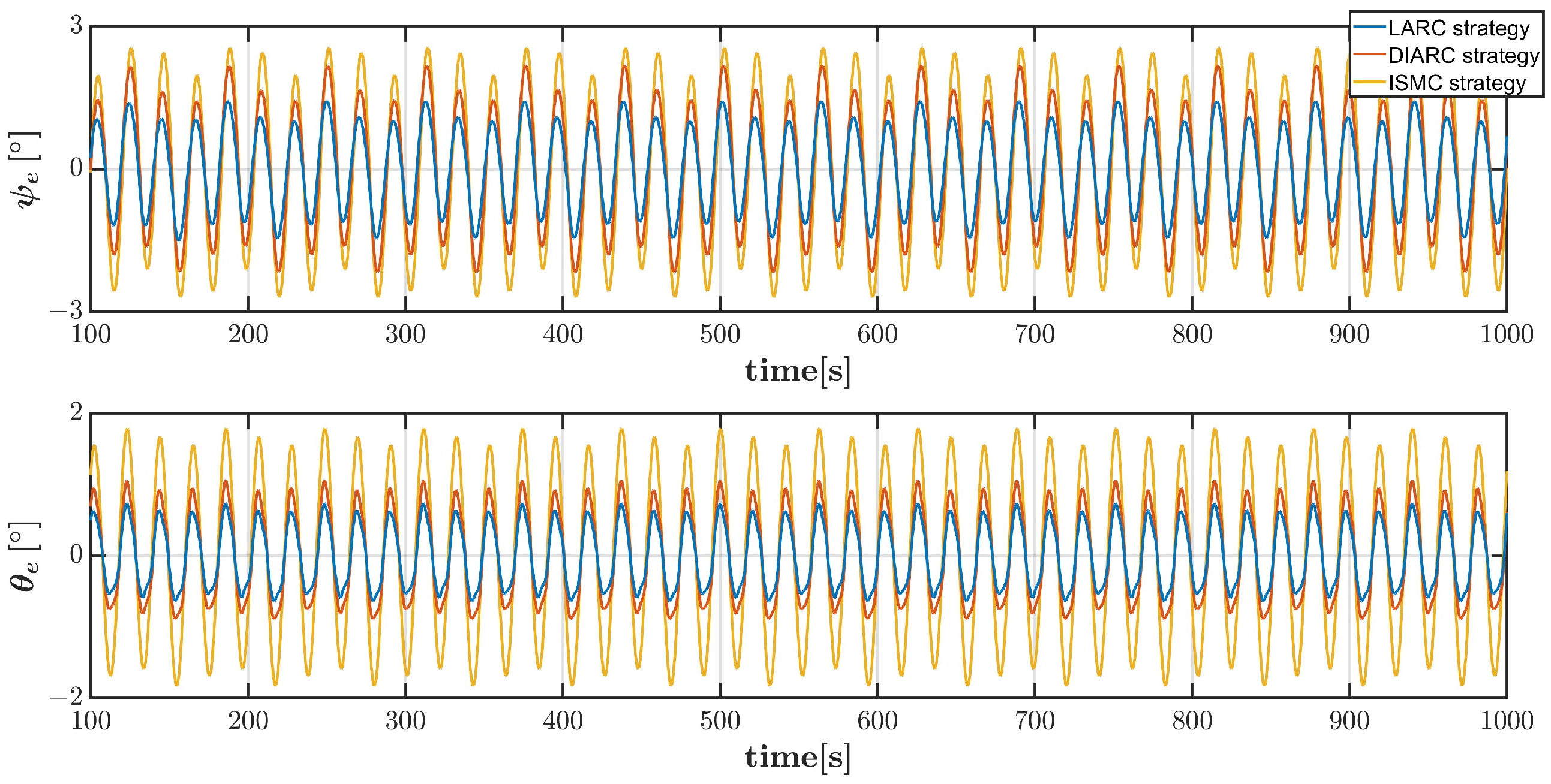
4.1. Combined Reference Trajectory Tracking
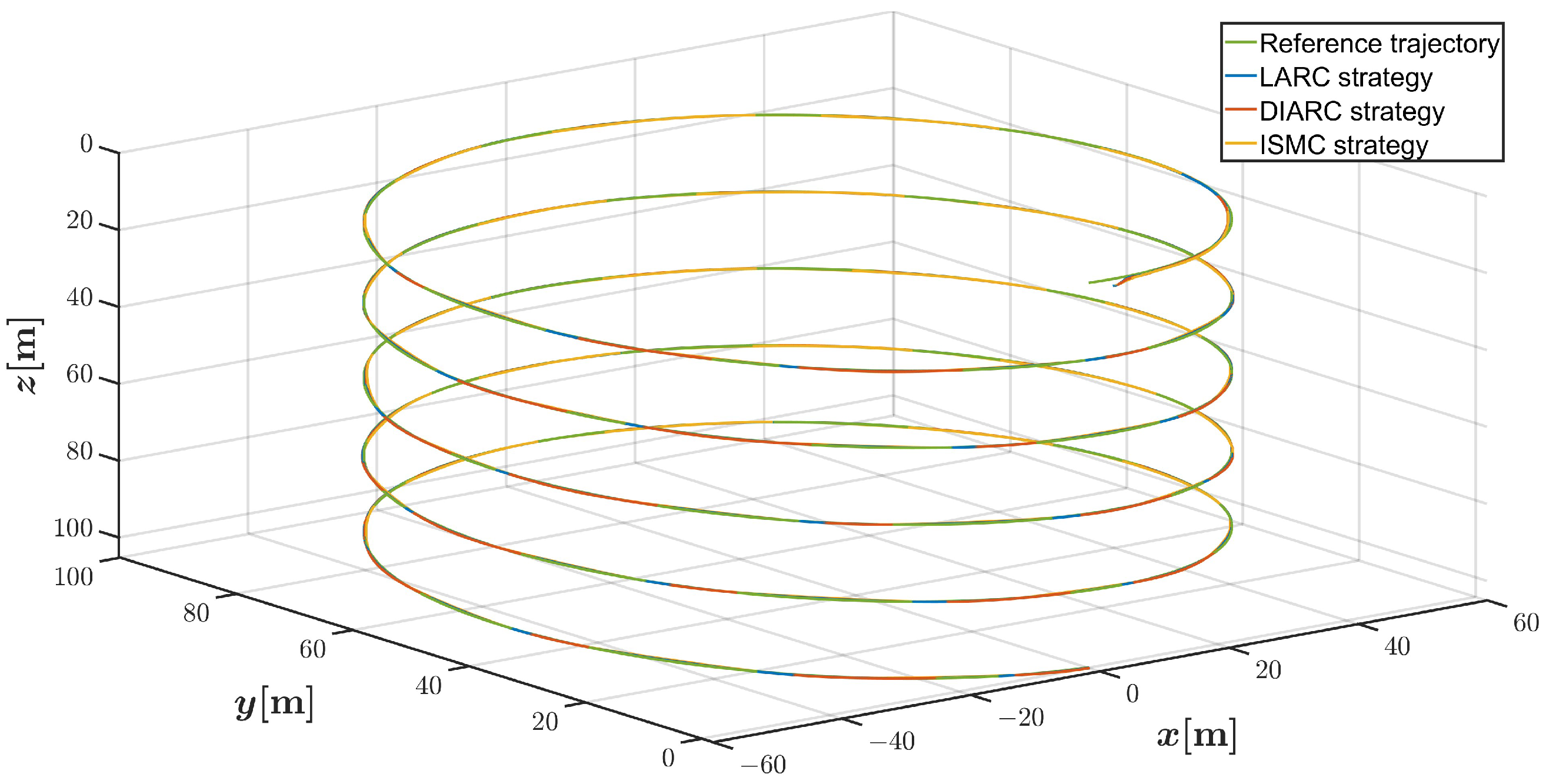
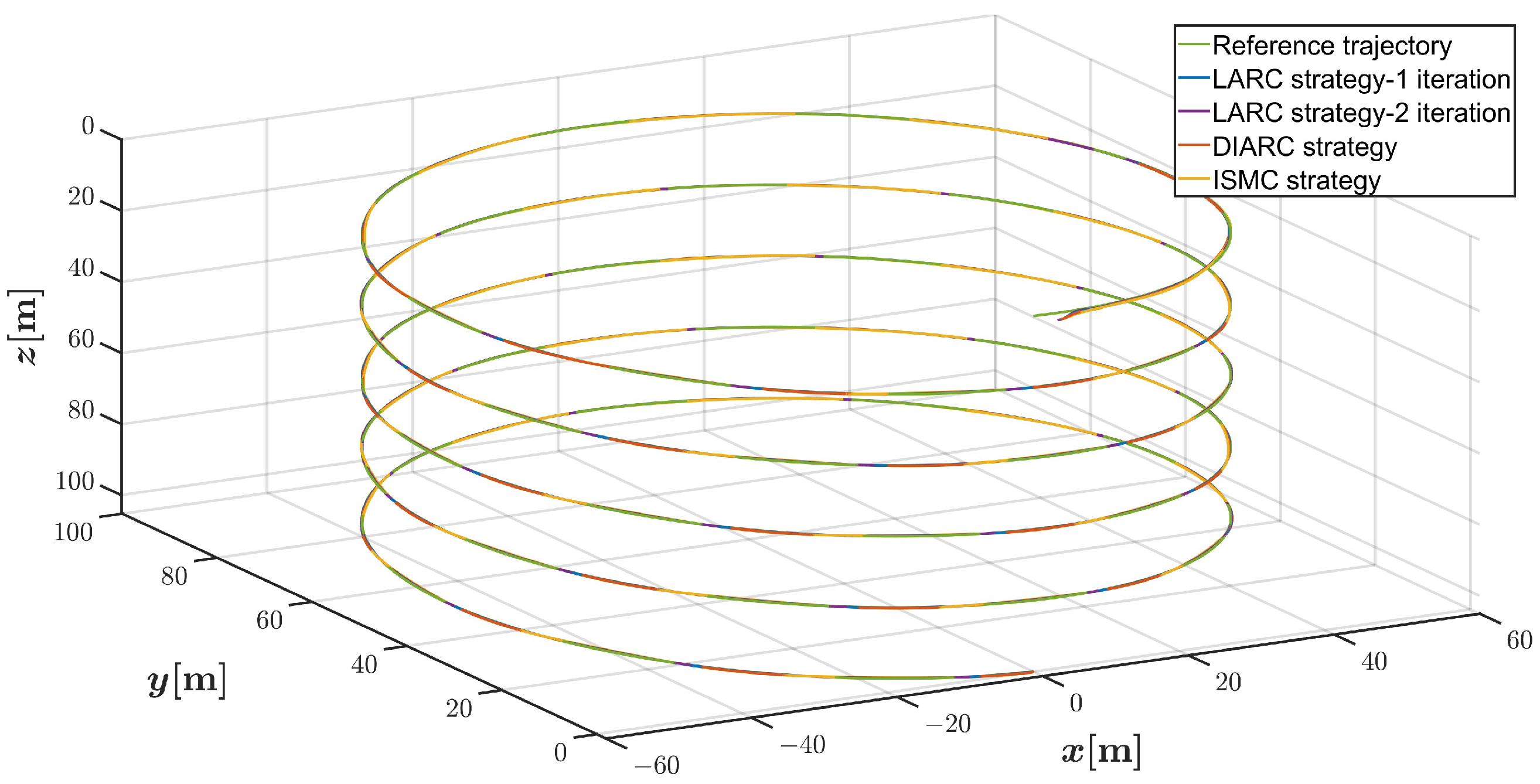
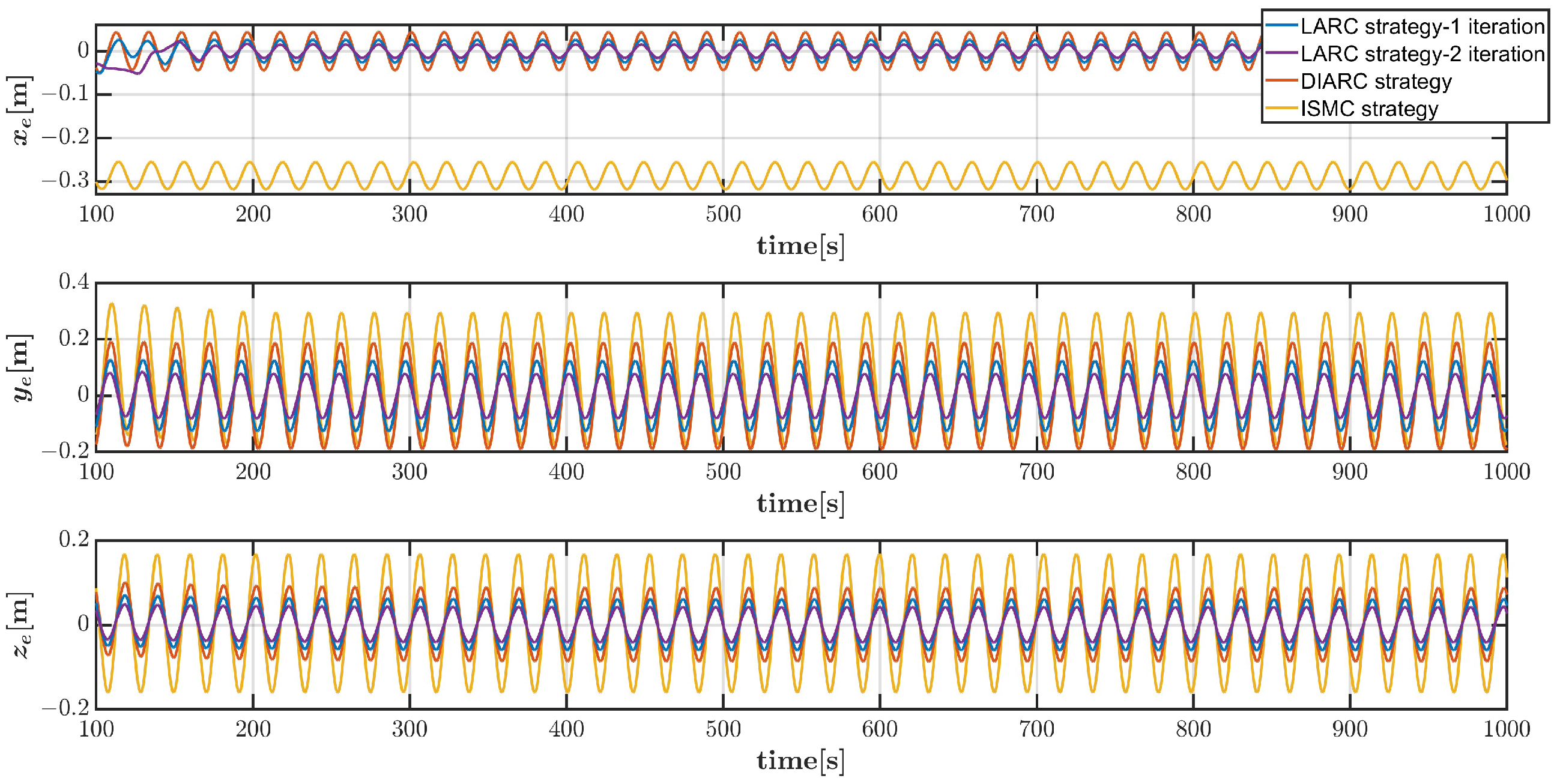
4.2. Helical Dive Reference Trajectory Tracking
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nomenclature | Definition |
|---|---|
| AUV | Autonomous underwater vehicle |
| ARC | Adaptive robust control |
| DIARC | Integrated direct/indirect adaptive robust control |
| ILC | Iterative learning control |
| LARC | Learning adaptive robust control |
| FFC-LOS | Feedforward Compensation–Line of Sight |
| ISMC | Integral sliding mode control |
| Earth-fixed inertial reference frame | |
| Body-fixed frame | |
| Serret–Frenet frame | |
| The position vector in | |
| The attitude vector in | |
| The desired trajectory in | |
| The desired attitude in | |
| The velocity in | |
| The angular velocity in | |
| Terms of inertia and added mass | |
| , , , , | Linear drag hydrodynamic coefficients |
| , , , , | Nonlinear drag hydrodynamic coefficients |
| , , , , | Oceanic external disturbance |
| , , | Propeller thrust and rudder torques |
| ILC compensation term in | |
| The kinematics control law | |
| , | FFC-LOS guidance law |
| The dynamics control law | |
| , , , | Linear feedback term, adjustable model compensation term, nonlinear robust feedback term, fast dynamic compensation term in the dynamics control law |
| Regressor vectors | |
| System parameters | |
| Adaptation rate matrices | |
| Adaptation functions | |
| Adaptation rates in fast dynamic compensation term | |
| Velocity and angular velocity tracking errors |
Appendix B
Appendix C
References
- Ning, B.; Han, Q.L.; Zuo, Z.; Jin, J.; Zheng, J. Collective behaviors of mobile robots beyond the nearest neighbor rules with switching topology. IEEE Trans. Cybern. 2017, 48, 1577–1590. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Du, L. Auv trajectory tracking models and control strategies: A review. J. Mar. Sci. Eng. 2021, 9, 1020. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. An architecture for using autonomous underwater vehicles in wireless sensor networks for underwater pipeline monitoring. IEEE Trans. Ind. Inform. 2018, 15, 1329–1340. [Google Scholar] [CrossRef]
- Degorre, L.; Fossen, T.I.; Chocron, O.; Delaleau, E. A model-based kinematic guidance method for control of underactuated autonomous underwater vehicles. Control Eng. Pract. 2024, 152, 106068. [Google Scholar] [CrossRef]
- Zhang, Z.; Lin, M.; Li, D. A double-loop control framework for AUV trajectory tracking under model parameters uncertainties and time-varying currents. Ocean Eng. 2022, 265, 112566. [Google Scholar] [CrossRef]
- Er, M.J.; Gong, H.; Liu, Y.; Liu, T. Intelligent trajectory tracking and formation control of underactuated autonomous underwater vehicles: A critical review. IEEE Trans. Syst. Man Cybern. Syst. 2023, 54, 543–555. [Google Scholar] [CrossRef]
- Jalving, B. The NDRE-AUV flight control system. IEEE J. Ocean. Eng. 1994, 19, 497–501. [Google Scholar] [CrossRef]
- Patil, P.V.; Khan, M.K.; Korulla, M.; Nagarajan, V.; Sha, O.P. Design optimization of an AUV for performing depth control maneuver. Ocean Eng. 2022, 266, 112929. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Xia, Y.; Huang, Z.; Xu, K.; Xu, G.; Li, Y. Three-Dimensional Trajectory Tracking for a Heterogeneous XAUV via Finite-Time Robust Nonlinear Control and Optimal Rudder Allocation. J. Mar. Sci. Eng. 2022, 10, 1297. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Trajectory tracking for autonomous underwater vehicle: An adaptive approach. Ocean Eng. 2019, 172, 511–522. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B.; Rout, R.; Kumar, B.K. Nonlinear H∞ control for an autonomous underwater vehicle in the vertical plane. IFAC-PapersOnLine 2016, 49, 391–395. [Google Scholar] [CrossRef]
- Lapierre, L.; Jouvencel, B. Robust nonlinear path-following control of an AUV. IEEE J. Ocean. Eng. 2008, 33, 89–102. [Google Scholar] [CrossRef]
- Shojaei, K. Three-dimensional neural network tracking control of a moving target by underactuated autonomous underwater vehicles. Neural Comput. Appl. 2019, 31, 509–521. [Google Scholar] [CrossRef]
- Hadi, B.; Khosravi, A.; Sarhadi, P. Deep reinforcement learning for adaptive path planning and control of an autonomous underwater vehicle. Appl. Ocean Res. 2022, 129, 103326. [Google Scholar] [CrossRef]
- Xu, J.; Wang, M.; Qiao, L. Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Eng. 2015, 105, 54–63. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Chen, T.; Yan, Z.; Yang, Z. Trajectory tracking control of an underactuated AUV based on backstepping sliding mode with state prediction. IEEE Access 2019, 7, 181983–181993. [Google Scholar] [CrossRef]
- Mahapatra, S.; Subudhi, B. Design of a steering control law for an autonomous underwater vehicle using nonlinear H∞ state feedback technique. Nonlinear Dyn. 2017, 90, 837–854. [Google Scholar] [CrossRef]
- Zhang, W.; Teng, Y.; Wei, S.; Xiong, H.; Ren, H. The robust H-infinity control of UUV with Riccati equation solution interpolation. Ocean Eng. 2018, 156, 252–262. [Google Scholar] [CrossRef]
- Luo, W.; Cheng, B. Disturbance suppression and NN compensation based trajectory tracking of underactuated AUV. Ocean Eng. 2023, 288, 116172. [Google Scholar] [CrossRef]
- Li, Z.; Wang, M.; Ma, G. Adaptive optimal trajectory tracking control of AUVs based on reinforcement learning. ISA Trans. 2023, 137, 122–132. [Google Scholar] [CrossRef] [PubMed]
- Yao, B.; Tomizuka, M. Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form. Automatica 1997, 33, 893–900. [Google Scholar] [CrossRef]
- Yao, B. High performance adaptive robust control of nonlinear systems: A general framework and new schemes. In Proceedings of the 36th IEEE Conference on Decision and Control, San Diego, CA, USA, 12 December 1997; IEEE: Piscataway, NJ, USA, 1997; Volume 3, pp. 2489–2494. [Google Scholar]
- Yao, B.; Jiang, C. Advanced motion control: From classical PID to nonlinear adaptive robust control. In Proceedings of the 2010 11th IEEE International Workshop on Advanced Motion Control (AMC), Nagaoka, Japan, 21–24 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 815–829. [Google Scholar]
- Hu, C.; Yao, B.; Wang, Q. Integrated direct/indirect adaptive robust contouring control of a biaxial gantry with accurate parameter estimations. Automatica 2010, 46, 701–707. [Google Scholar] [CrossRef]
- Mohanty, A.; Yao, B. Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates. IEEE Trans. Control Syst. Technol. 2010, 19, 567–575. [Google Scholar] [CrossRef]
- Yao, B. Integrated direct/indirect adaptive robust control of SISO nonlinear systems in semi-strict feedback form. In Proceedings of the Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 4, pp. 3020–3025. [Google Scholar]
- Ahn, H.S.; Chen, Y.; Moore, K.L. Iterative learning control: Brief survey and categorization. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1099–1121. [Google Scholar] [CrossRef]
- Hu, C.; Hu, Z.; Zhu, Y.; Wang, Z.; He, S. Model-data driven learning adaptive robust control of precision mechatronic motion systems with comparative experiments. IEEE Access 2018, 6, 78286–78296. [Google Scholar] [CrossRef]
- Bristow, D.A.; Tharayil, M.; Alleyne, A.G. A survey of iterative learning control. IEEE Control Syst. Mag. 2006, 26, 96–114. [Google Scholar]
- Saab, S.S.; Shen, D.; Orabi, M.; Kors, D.; Jaafar, R.H. Iterative learning control: Practical implementation and automation. IEEE Trans. Ind. Electron. 2021, 69, 1858–1866. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Willy & Sons Ltd: Hoboken, NJ, USA, 2011. [Google Scholar]
- Guo, C.; Han, Y.; Yu, H.; Qin, J. Spatial path-following control of underactuated auv with multiple uncertainties and input saturation. IEEE Access 2019, 7, 98014–98022. [Google Scholar] [CrossRef]
- Breivik, M.; Fossen, T.I. Guidance-based path following for autonomous underwater vehicles. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 2807–2814. [Google Scholar]
- Huang, Z.; Xia, Y.; Wang, W.; Xu, G.; Xiang, X.; Xu, K. SHSA-based adaptive roll-safety 3D tracking control of a X-Rudder AUV with actuator dynamics. Ocean Eng. 2022, 265, 112544. [Google Scholar] [CrossRef]
- Goodwin, G.C.; Mayne, D.Q. A parameter estimation perspective of continuous time model reference adaptive control. Automatica 1987, 23, 57–70. [Google Scholar] [CrossRef]
- Yao, B.; Palmer, A. Indirect adaptive robust control of SISO nonlinear systems in semi-strict feedback forms. IFAC Proc. Vol. 2002, 35, 397–402. [Google Scholar] [CrossRef]
- Landau, I.D.; Lozano, R.; M’Saad, M.; Karimi, A. Adaptive Control: Algorithms, Analysis and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Pettersen, K.Y.; Egeland, O. Time-varying exponential stabilization of the position and attitude of an underactuated autonomous underwater vehicle. IEEE Trans. Autom. Control 1999, 44, 112–115. [Google Scholar] [CrossRef]





| Performance Indices | LARC | DIARC | ISMC |
|---|---|---|---|
| Total MAE | 1.4208 | 2.0879 | 3.0263 |
| Total MSE | 1.2513 | 2.5514 | 4.7696 |
| MAE | 0.0209 | 0.0299 | 0.0536 |
| MSE | 0.0021 | 0.0024 | 0.0045 |
| MAE | 0.0824 | 0.1232 | 0.1715 |
| MSE | 0.0117 | 0.0235 | 0.0461 |
| MAE | 0.0371 | 0.0534 | 0.0995 |
| MSE | 0.0018 | 0.0036 | 0.0126 |
| MAE | 0.8522 | 1.2666 | 1.6016 |
| MSE | 1.0073 | 2.0605 | 3.2048 |
| MAE | 0.4282 | 0.6148 | 1.1001 |
| MSE | 0.2285 | 0.4614 | 1.5015 |
| Performance Indices | LARC | DIARC | ISMC |
|---|---|---|---|
| Total MAE | 1.5013 | 2.2084 | 3.4047 |
| Total MSE | 1.3958 | 2.8627 | 5.4221 |
| MAE | 0.0214 | 0.0312 | 0.2671 |
| MSE | 0.0020 | 0.0024 | 0.0729 |
| MAE | 0.0833 | 0.1236 | 0.1581 |
| MSE | 0.0110 | 0.0215 | 0.0348 |
| MAE | 0.0382 | 0.0550 | 0.1029 |
| MSE | 0.0018 | 0.0038 | 0.0133 |
| MAE | 0.9137 | 1.3599 | 1.6988 |
| MSE | 1.1365 | 2.3395 | 3.6014 |
| MAE | 0.4447 | 0.6388 | 1.1779 |
| MSE | 0.2444 | 0.4954 | 1.6998 |
| Performance Indices | LARC | DIARC | ISMC |
|---|---|---|---|
| Total MAE | 1.4609 | 2.0931 | 3.0078 |
| Total MSE | 2.5752 | 3.4832 | 5.2508 |
| MAE | 0.0232 | 0.0328 | 0.0654 |
| MSE | 0.0044 | 0.0047 | 0.0081 |
| MAE | 0.0879 | 0.1296 | 0.1753 |
| MSE | 0.0199 | 0.0332 | 0.0548 |
| MAE | 0.0379 | 0.0538 | 0.0994 |
| MSE | 0.0021 | 0.0039 | 0.0127 |
| MAE | 0.8517 | 1.2420 | 1.5823 |
| MSE | 1.8165 | 2.5747 | 3.6042 |
| MAE | 0.4602 | 0.6349 | 1.0855 |
| MSE | 0.7324 | 0.8667 | 1.5710 |
| Performance Indices | LARC-2 Iteration | LARC-1 Iteration | DIARC | ISMC |
|---|---|---|---|---|
| Total MAE | 1.0766 | 1.5504 | 2.2279 | 3.3942 |
| Total MSE | 2.3505 | 2.6816 | 3.7884 | 5.8889 |
| MAE | 0.0174 | 0.0234 | 0.0338 | 0.2883 |
| MSE | 0.0041 | 0.0042 | 0.0046 | 0.0855 |
| MAE | 0.0597 | 0.0897 | 0.1316 | 0.1661 |
| MSE | 0.0136 | 0.0197 | 0.0318 | 0.0466 |
| MAE | 0.0280 | 0.0393 | 0.0558 | 0.1026 |
| MSE | 0.0013 | 0.0022 | 0.0041 | 0.0132 |
| MAE | 0.6178 | 0.9214 | 1.3495 | 1.6781 |
| MSE | 1.6288 | 1.9145 | 2.8622 | 3.9934 |
| MAE | 0.3537 | 0.4765 | 0.6571 | 1.1591 |
| MSE | 0.7028 | 0.7411 | 0.8858 | 1.7502 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, L.; Zhou, R.; Guo, Q.; Ma, L.; Hu, C.; Luo, J. Spatial Trajectory Tracking of Underactuated Autonomous Underwater Vehicles by Model–Data-Driven Learning Adaptive Robust Control. J. Mar. Sci. Eng. 2025, 13, 1151. https://doi.org/10.3390/jmse13061151
Guo L, Zhou R, Guo Q, Ma L, Hu C, Luo J. Spatial Trajectory Tracking of Underactuated Autonomous Underwater Vehicles by Model–Data-Driven Learning Adaptive Robust Control. Journal of Marine Science and Engineering. 2025; 13(6):1151. https://doi.org/10.3390/jmse13061151
Chicago/Turabian StyleGuo, Linyuan, Ran Zhou, Qingchang Guo, Liran Ma, Chuxiong Hu, and Jianbin Luo. 2025. "Spatial Trajectory Tracking of Underactuated Autonomous Underwater Vehicles by Model–Data-Driven Learning Adaptive Robust Control" Journal of Marine Science and Engineering 13, no. 6: 1151. https://doi.org/10.3390/jmse13061151
APA StyleGuo, L., Zhou, R., Guo, Q., Ma, L., Hu, C., & Luo, J. (2025). Spatial Trajectory Tracking of Underactuated Autonomous Underwater Vehicles by Model–Data-Driven Learning Adaptive Robust Control. Journal of Marine Science and Engineering, 13(6), 1151. https://doi.org/10.3390/jmse13061151