
Research on Power Conversion and Control Technology of Ocean Buoy Tidal Energy Power Supply System

Abstract
1. Introduction
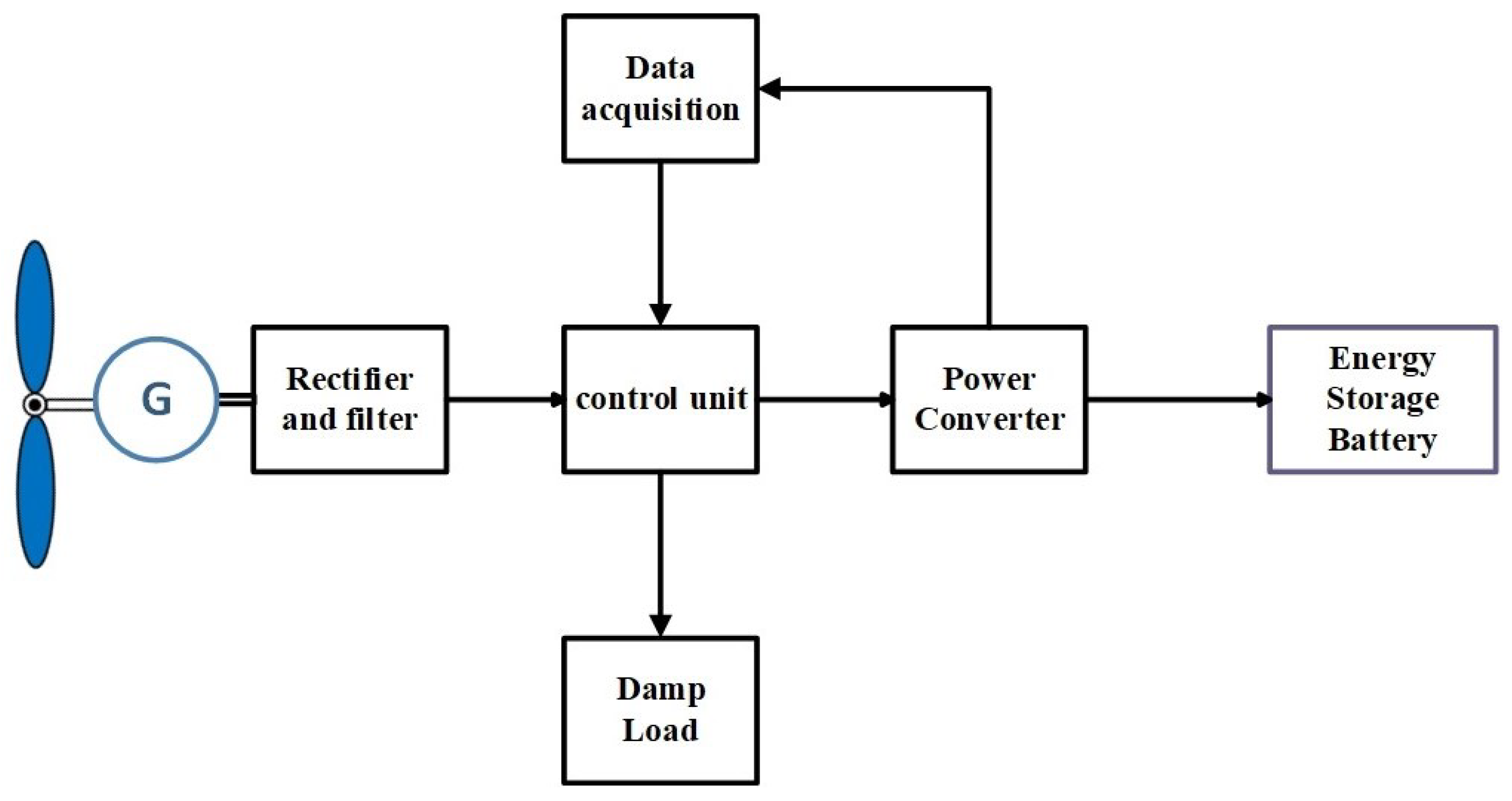
2. System Composition and Functional Requirements
3. Design and Analysis of Power Conversion Structures
3.1. Power Conversion Topologies
- (a)
- Core loss follows Steinmetz’s equation, requiring low-loss ferrites (e.g., 3C95) for >100 kHz operation;
- (b)
- Thermal derating necessitates <80% flux density at 100 °C ambient temperature;
- (c)
- Marine conditions reduce heat dissipation by 15% due to conformal coating. These constraints limit maximum power density to 0.8 W/cm³ in our buoy implementation.
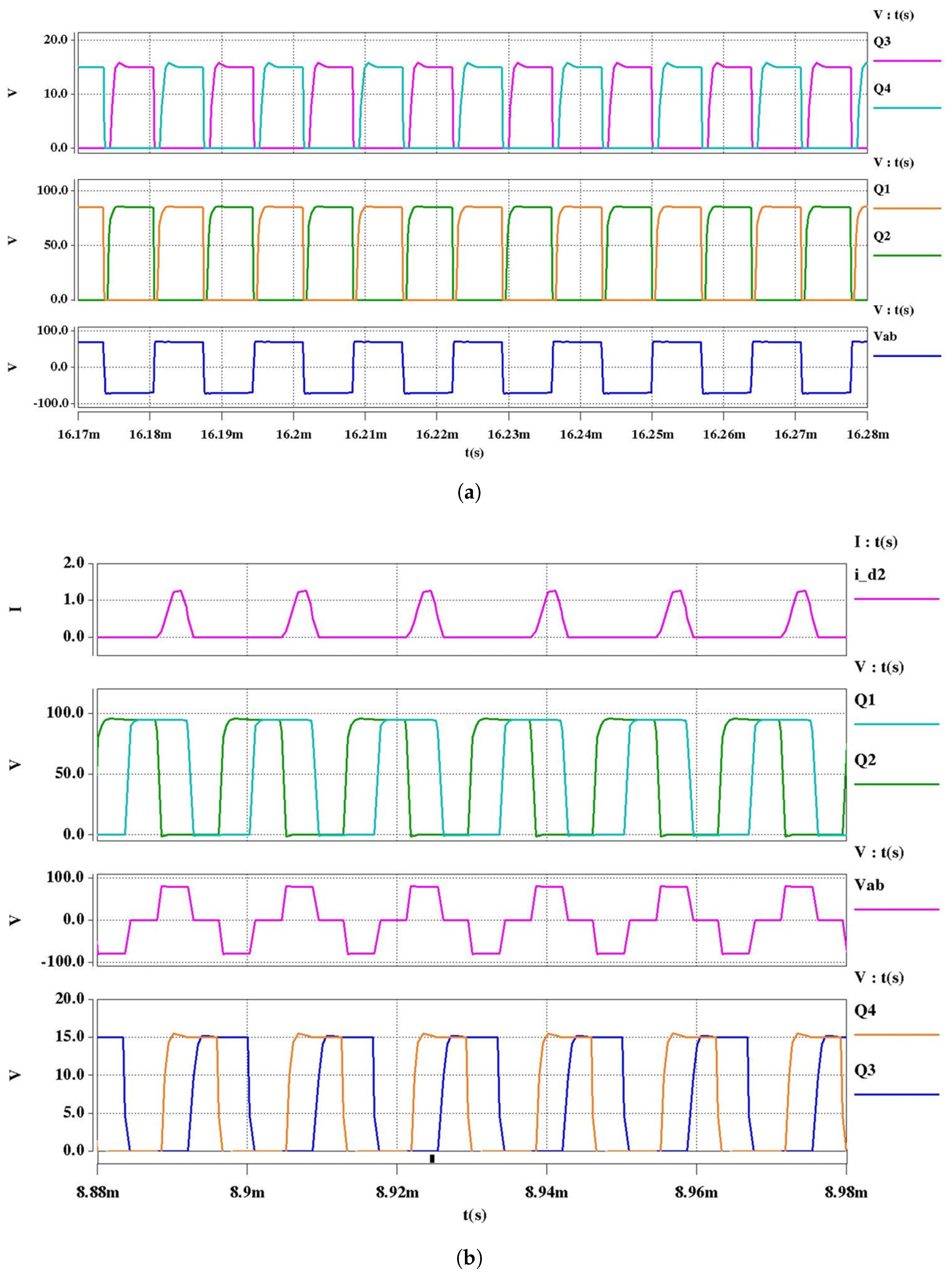
3.2. Operating Modal Analysis
4. Analysis of Control Strategies
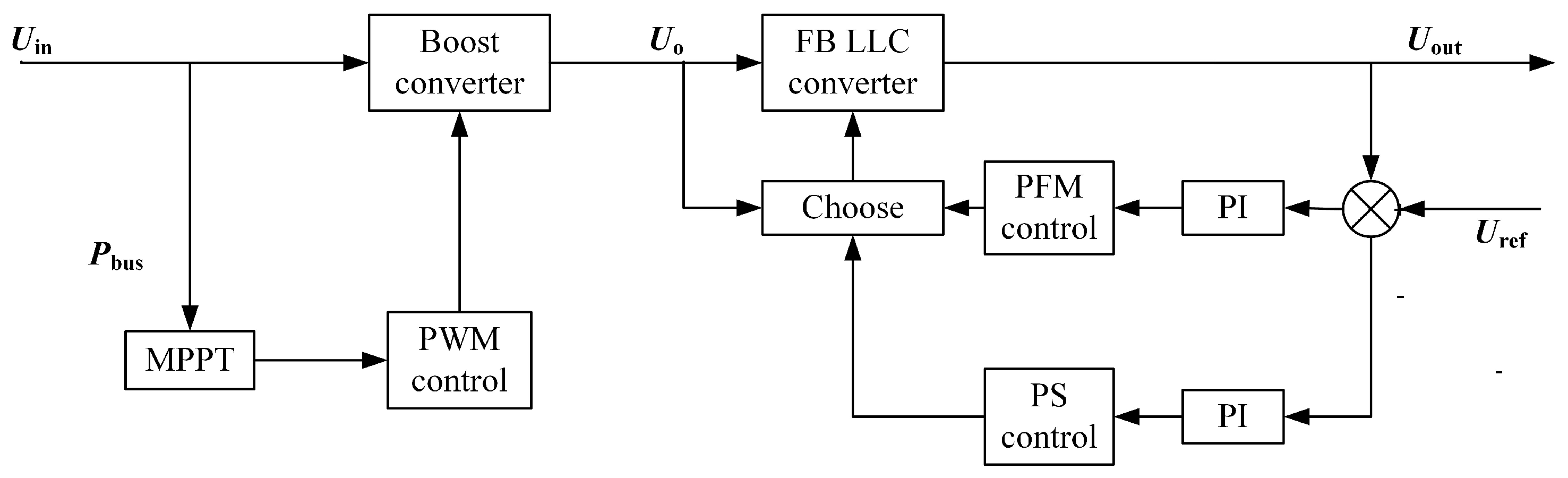
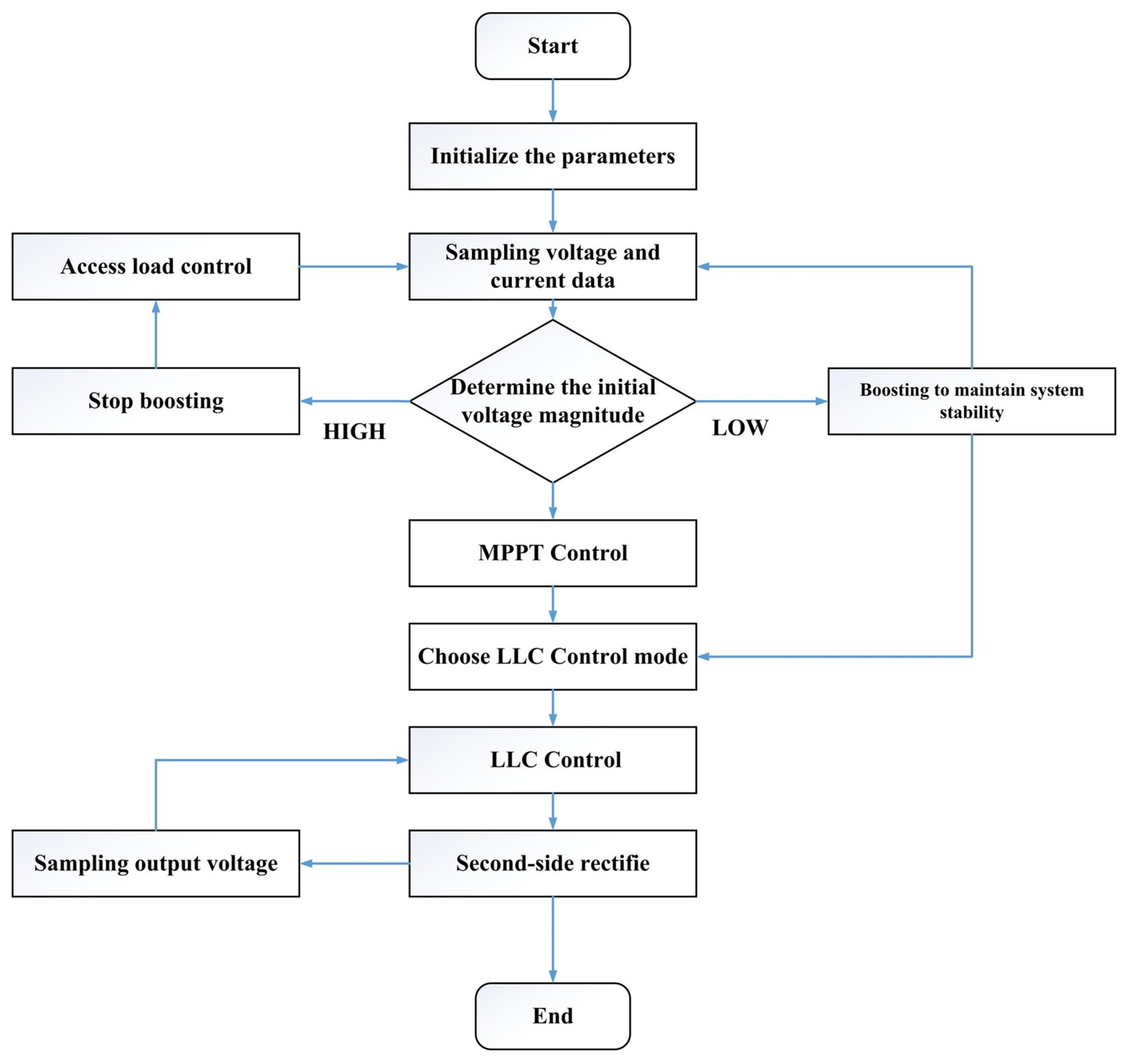
4.1. Control System Structure
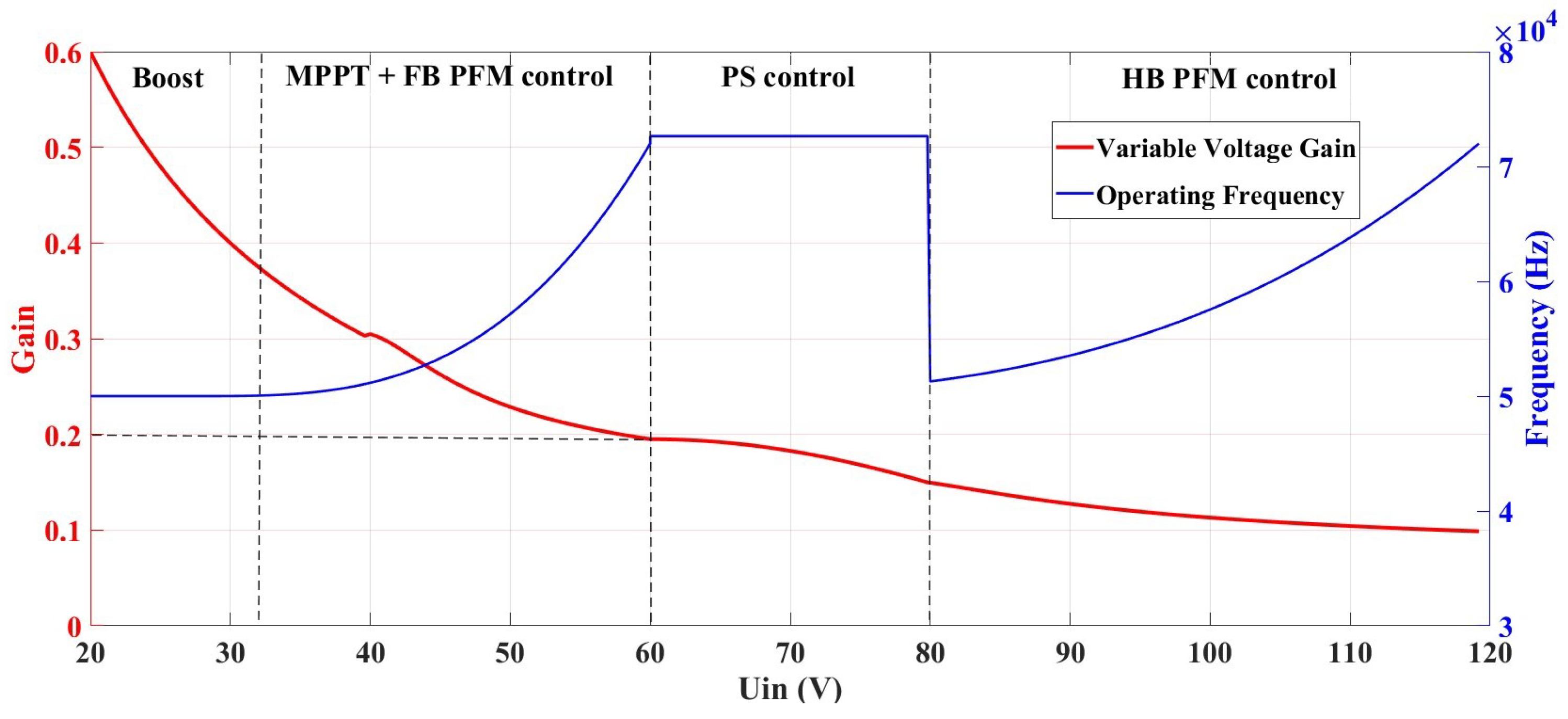
4.2. Variable Mode Frequency Control
4.3. Power Tracking Control
4.3.1. Standard Gray Wolf Optimization Algorithm
4.3.2. Improved Gray Wolf Optimization Algorithm (PSO-GWO)
- (1)
- Improved Chebyshev chaotic mapping
- (2)
- Nonlinear convergence factor adjustment strategy
- (3)
- Adaptive limiting factor
- (4)
- PSO-GWO hybrid strategy
- Initialize the gray wolf population parameters, among which are the gray wolf population size N, the maximum number of algorithmic optimization searches tmax, the spatial dimension dim, and the range of the algorithmic optimization space ;
- Collect voltage and current parameters and input them into the algorithm.
- Determine the population range based on the input parameters.
- Carry out hybridization strategy of the gray wolf population to increase the genetic diversity of the population and update the geographic location of the gray wolf population.
- Calculate the fitness of each individual wolf in the current gray wolf population and determine the wolf, wolf, and wolf.
- Determine the parameter value of C according to the equation while confirming parameter A.
- Update the position of individual gray wolves according to Equation (13) and recalculate the fitness value of each gray wolf.
- Determine the optimal gray wolf individual in the current generation population and execute.
5. Simulation Modeling Analysis
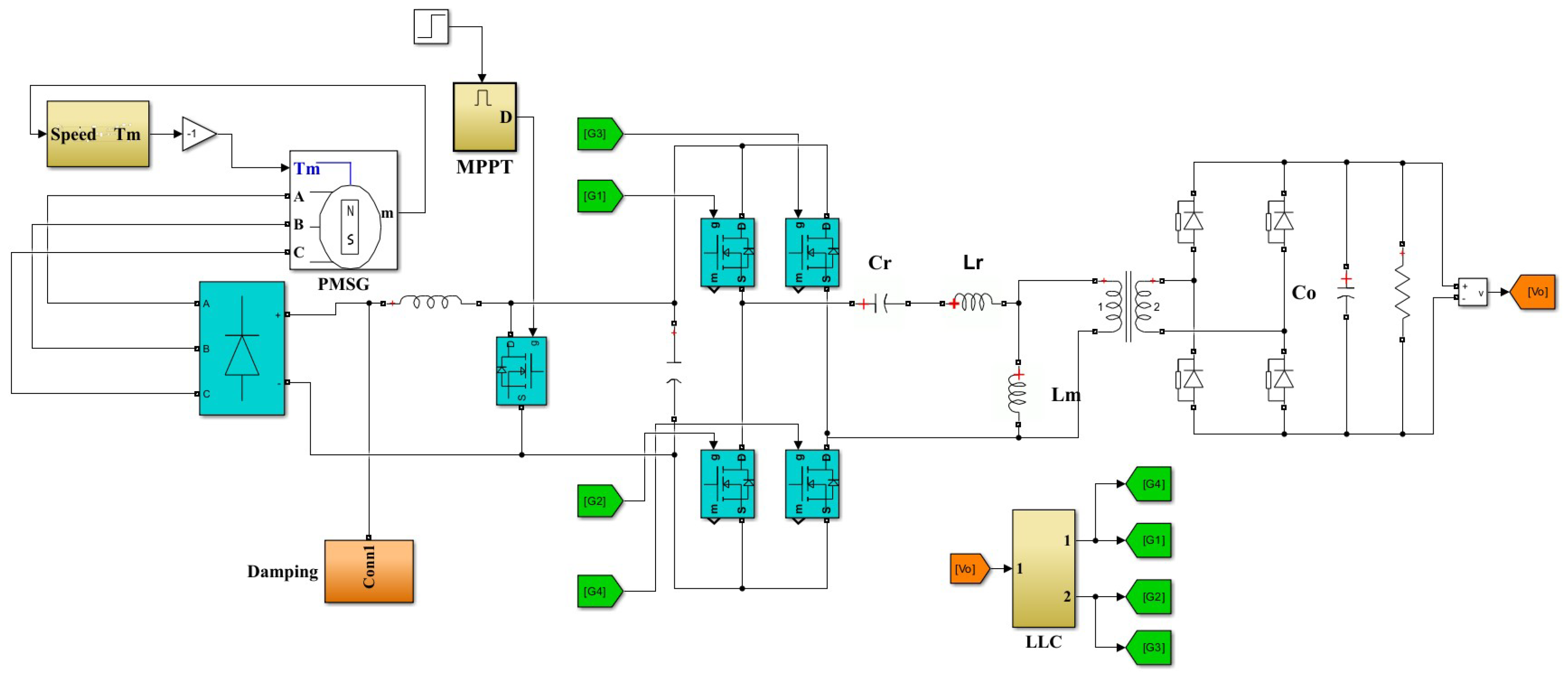
5.1. System Simulation Model
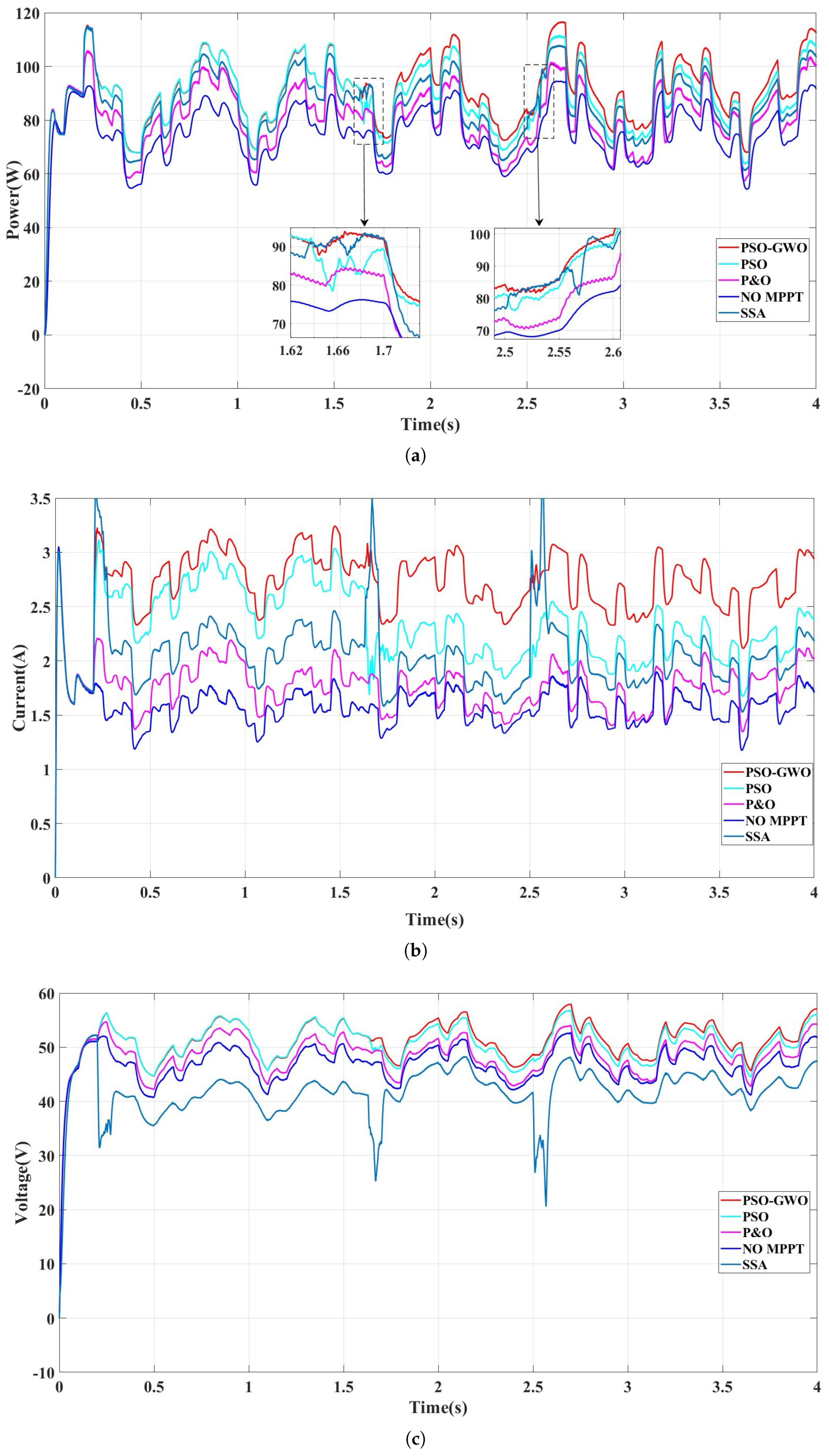
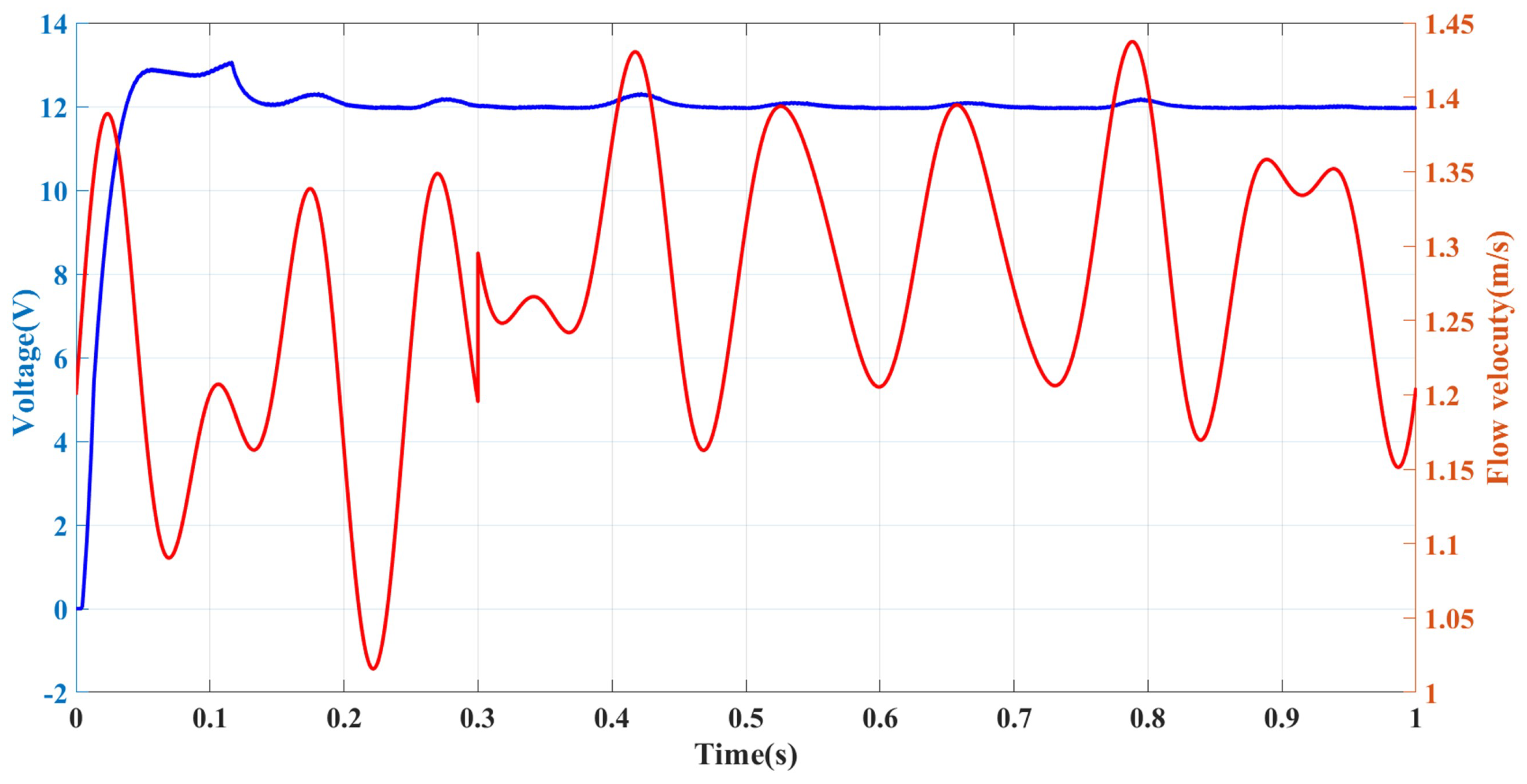
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Wu, W.; Cui, L.; Wu, Y.; Zhu, L.; Koutroulis, E.; Blaabjerg, F. A new wave energy converter for marine data buoy. IEEE Trans. Ind. Electron. 2022, 70, 2076–2084. [Google Scholar] [CrossRef]
- Xi, F.; Pang, Y.; Liu, G.; Wang, S.; Li, W.; Zhang, C.; Wang, Z.L. Self-powered intelligent buoy system by water wave energy for sustainable and autonomous wireless sensing and data transmission. Nano Energy 2019, 61, 1–9. [Google Scholar] [CrossRef]
- Larcher, D.; Tarascon, J.M. Towards greener and more sustainable batteries for electrical energy storage. Nat. Chem. 2015, 7, 19–29. [Google Scholar] [CrossRef] [PubMed]
- Ghefiri, K.; Bouallègue, S.; Haggège, J.; Garrido, I.; Garrido, A.J. Modeling and MPPT control of a Tidal Stream Generator. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 1003–1008. [Google Scholar]
- Segura, E.; Morales, R.; Somolinos, J.; López, A. Techno-economic challenges of tidal energy conversion systems: Current status and trends. Renew. Sustain. Energy Rev. 2017, 77, 536–550. [Google Scholar] [CrossRef]
- Bahaj, A.S. Generating electricity from the oceans. Renew. Sustain. Energy Rev. 2011, 15, 3399–3416. [Google Scholar] [CrossRef]
- Keysan, O.; McDonald, A.S.; Mueller, M. A direct drive permanent magnet generator design for a tidal current turbine (SeaGen). In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 224–229. [Google Scholar]
- Ghefiri, K.; Garrido, I.; Garrido, A.J.; Bouallègue, S.; Haggège, J. Fuzzy gain scheduling of a rotational speed control for a tidal stream generator. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 1271–1277. [Google Scholar]
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Djebarri, S.; Charpentier, J.F.; Scuiller, F.; Benbouzid, M. Design methodology of permanent magnet generators for fixed-pitch tidal turbines with overspeed power limitation strategy. J. Ocean Eng. Sci. 2020, 5, 73–83. [Google Scholar] [CrossRef]
- Uihlein, A.; Magagna, D. Wave and tidal current energy—A review of the current state of research beyond technology. Renew. Sustain. Energy Rev. 2016, 58, 1070–1081. [Google Scholar] [CrossRef]
- Zhang, H.B.; Fletcher, J.; Greeves, N.; Finney, S.; Williams, B. One-power-point operation for variable speed wind/tidal stream turbines with synchronous generators. IET Renew. Power Gener. 2011, 5, 99–108. [Google Scholar] [CrossRef]
- Shahi, A.; Bhattacharjee, C. A study & analysis of fuzzy based P&O MPPT scheme in PMSG based wind turbine. In Proceedings of the 2018 Technologies for Smart-City Energy Security and Power (ICSESP), Bhubaneswar, India, 28–30 March 2018; pp. 1–4. [Google Scholar]
- Sousounis, M.C.; Shek, J.K.; Mueller, M.A. Modelling, control and frequency domain analysis of a tidal current conversion system with onshore converters. IET Renew. Power Gener. 2016, 10, 158–165. [Google Scholar] [CrossRef]
- Abokhalil, A.G. Control System of DFIG for Wind Power Generation Systems; LAP LAMBERT Academic Publishing: Saarbrücken, Germany, 2015. [Google Scholar]
- Abo-Khalil, A.G.; Alghamdi, A.S. MPPT of permanent magnet synchronous generator in tidal energy systems using support vector regression. Sustainability 2021, 13, 2223. [Google Scholar] [CrossRef]
- De Simone, S.; Adragna, C.; Spini, C. Design guideline for magnetic integration in LLC resonant converters. In Proceedings of the 2008 International Symposium on Power Electronics, Electrical Drives, Automation and Motion, lschia, Italy, 11–13 June 2008; pp. 950–957. [Google Scholar]
- Wu, X.; Bai, Z.; Ma, H. An LLC converter operating in super-wide output voltage range with variable-mode control strategy. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar]
- Cao, Q.; Li, Z.; Wang, H. Wide voltage gain range LLC DC/DC topologies: State-of-the-art. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018-ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 100–107. [Google Scholar]
- Liang, Z.; Guo, R.; Wang, G.; Huang, A. A new wide input range high efficiency photovoltaic inverter. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 2937–2943. [Google Scholar]
- Jovanović, M.M.; Irving, B.T. On-the-fly topology-morphing control—Efficiency optimization method for LLC resonant converters operating in wide input-and/or output-voltage range. IEEE Trans. Power Electron. 2015, 31, 2596–2608. [Google Scholar] [CrossRef]
- Wu, H.; Zhan, X.; Xing, Y. Interleaved LLC resonant converter with hybrid rectifier and variable-frequency plus phase-shift control for wide output voltage range applications. IEEE Trans. Power Electron. 2016, 32, 4246–4257. [Google Scholar] [CrossRef]
- Deng, J.; Li, S.; Hu, S.; Mi, C.C.; Ma, R. Design methodology of LLC resonant converters for electric vehicle battery chargers. IEEE Trans. Veh. Technol. 2013, 63, 1581–1592. [Google Scholar] [CrossRef]
- De Simone, S.; Adragna, C.; Spini, C.; Gattavari, G. Design-oriented steady-state analysis of LLC resonant converters based on FHA. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion SPEEDAM, Taormina, Italy, 23–26 May 2006; pp. 200–207. [Google Scholar]
- Yamamoto, J.; Zaitsu, T.; Abe, S.; Ninomiya, T. PFM and PWM hybrid controlled LLC converter. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014-ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 177–182. [Google Scholar]
- Yudi, X.; Xingkui, M.; Zhe, Z.; Shi, Y. New hybrid control for wide input full-bridge LLC resonant DC/DC converter. In Proceedings of the 2018 3rd International Conference on Intelligent Green Building and Smart Grid (IGBSG), Yilan, Taiwan, 22–25 April 2018; pp. 1–4. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Lettenmaier, T.; Von Jouanne, A.; Brekken, T. A new maximum power point tracking algorithm for ocean wave energy converters. Int. J. Mar. Energy 2017, 17, 40–55. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95 Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Abdelshafy, A.M.; Hassan, H.; Jurasz, J. Optimal design of a grid-connected desalination plant powered by renewable energy resources using a hybrid PSO–GWO approach. Energy Convers. Manag. 2018, 173, 331–347. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name Parameter | Value |
|---|---|
| Rated power | 120 W |
| Rated voltage | 36 V |
| Impeller diameter | 1.8 m |
| Rated flow rate | 1.0 m/s |
| Rated speed | 28 rpm |
| Modal | ||||||
|---|---|---|---|---|---|---|
| 1 | Conducted | Conducted | Shutdown | Shutdown | 0 | 0 |
| 2 | Conducted | Shutdown | Shutdown | Shutdown | ↑ | 0 |
| 3 | Conducted | Shutdown | Shutdown | Conducted | + | ↑ |
| 4 | Shutdown | Shutdown | Shutdown | Conducted | ↓ | ↓ |
| 5 | Shutdown | Shutdown | Conducted | Conducted | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, C.; Sun, F.; Yang, F. Research on Power Conversion and Control Technology of Ocean Buoy Tidal Energy Power Supply System. J. Mar. Sci. Eng. 2025, 13, 1129. https://doi.org/10.3390/jmse13061129
Song C, Sun F, Yang F. Research on Power Conversion and Control Technology of Ocean Buoy Tidal Energy Power Supply System. Journal of Marine Science and Engineering. 2025; 13(6):1129. https://doi.org/10.3390/jmse13061129
Chicago/Turabian StyleSong, Changpo, Fengyong Sun, and Fan Yang. 2025. "Research on Power Conversion and Control Technology of Ocean Buoy Tidal Energy Power Supply System" Journal of Marine Science and Engineering 13, no. 6: 1129. https://doi.org/10.3390/jmse13061129
APA StyleSong, C., Sun, F., & Yang, F. (2025). Research on Power Conversion and Control Technology of Ocean Buoy Tidal Energy Power Supply System. Journal of Marine Science and Engineering, 13(6), 1129. https://doi.org/10.3390/jmse13061129