
Dynamic Analysis and Experimental Research on Anti-Swing Control of Distributed Mass Payload for Marine Cranes



Abstract
1. Introduction
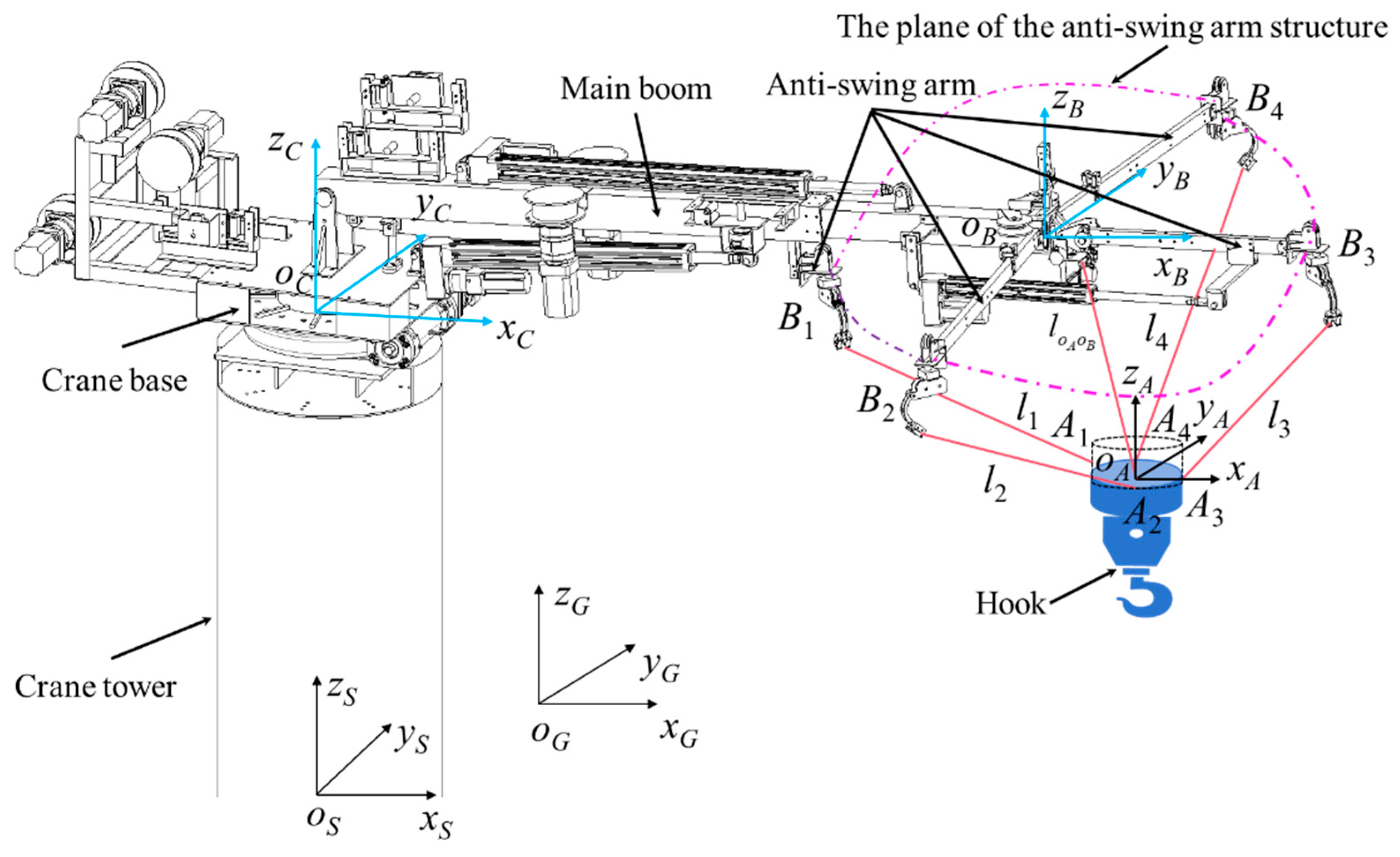
2. Kinematic and Static Modelling and Analysis
2.1. Kinematics of a Flexible Cable Parallel Anti-Swing System
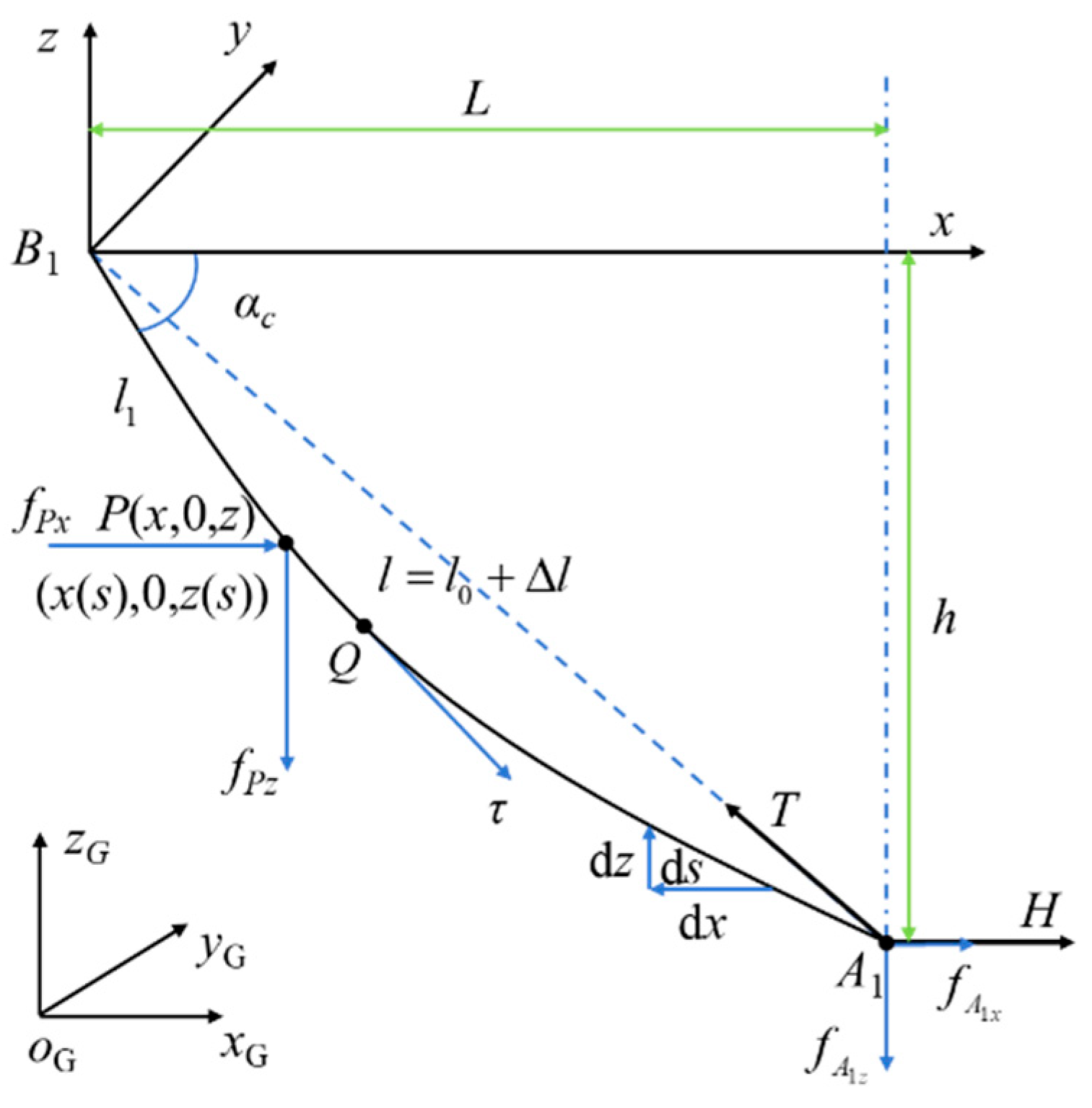
2.2. Static Modelling Based on Elastic Deformation of Slings
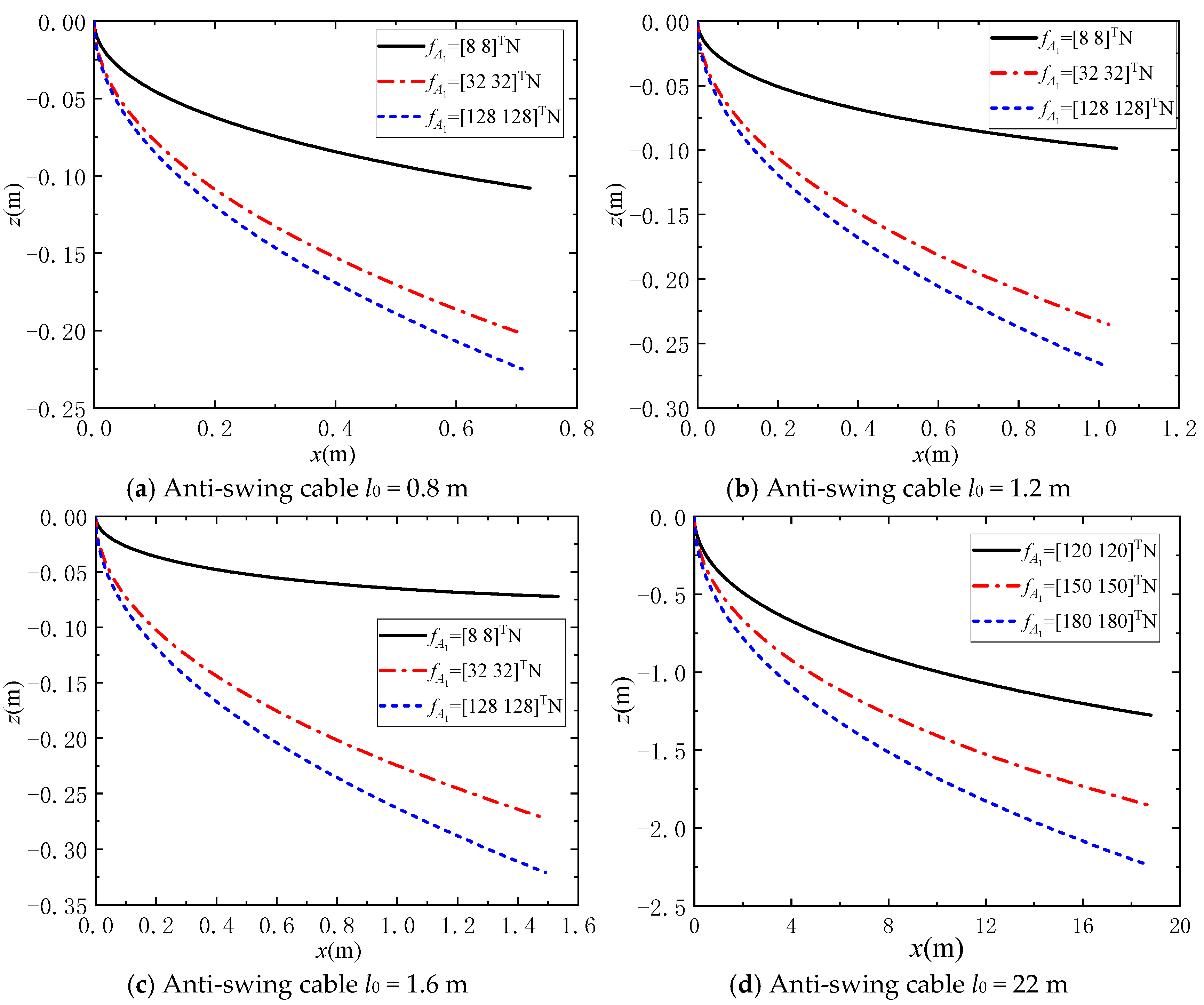
2.3. Static Analysis of Anti-Swing Cable Catenary Model
3. Dynamic Modelling of Diversified Lifting Operations for Flexible Cable Parallel Anti-Swing System
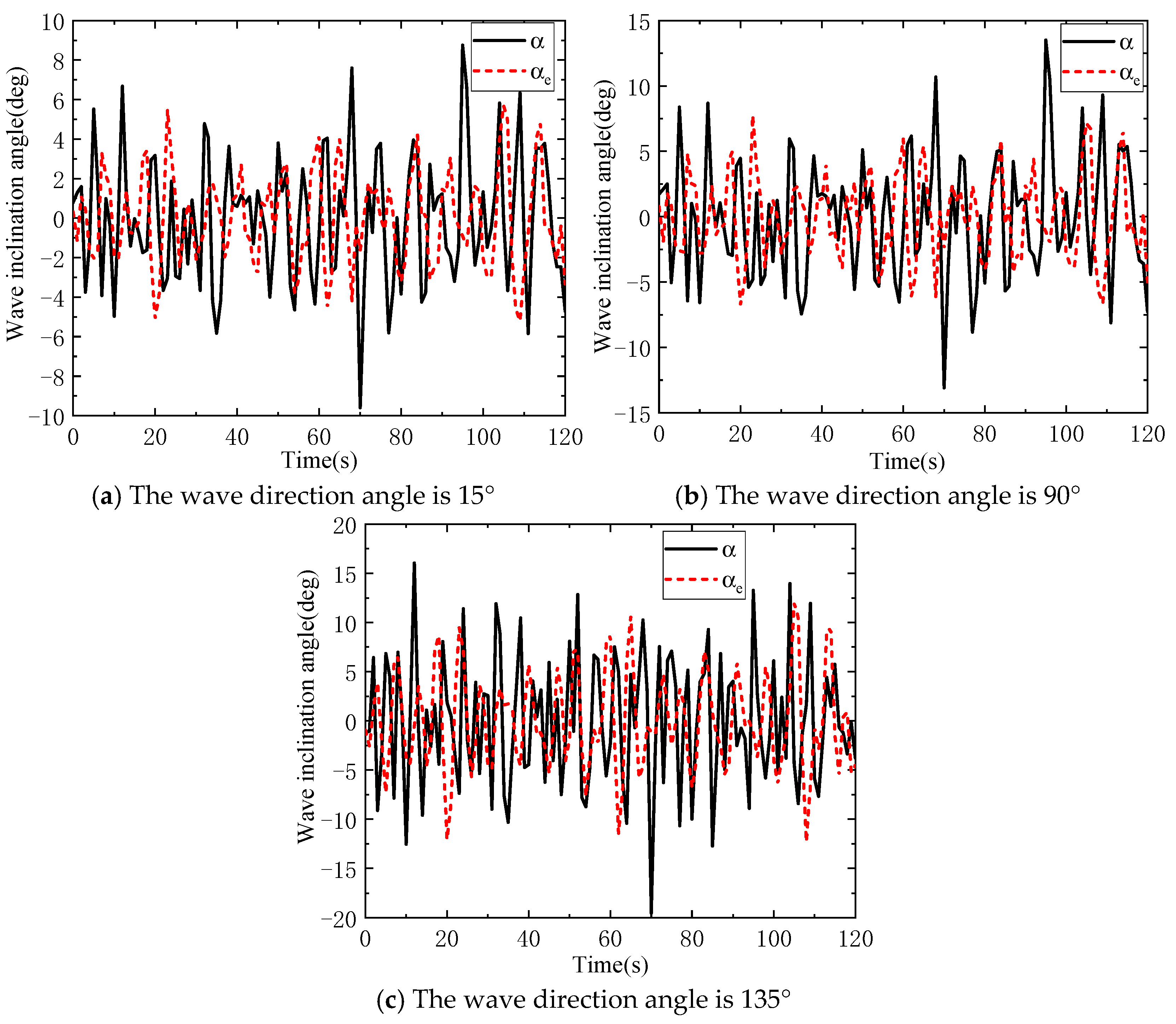
3.1. Ship Roll and Pitch Coupling Motion Modelling
- (1)
- Ignoring the influence of yaw on the ship motion, the angular displacement and angular velocity of yaw are both 0.
- (2)
- The centre of gravity position G0 is fixed under the coupled excitation of roll and pitch.
- (3)
- Both ship roll and pitch occur around the centre of gravity, point G0.
3.2. DMP Dynamic Modelling of Flexible Cable Parallel Anti-Swing System
4. Experimental Study
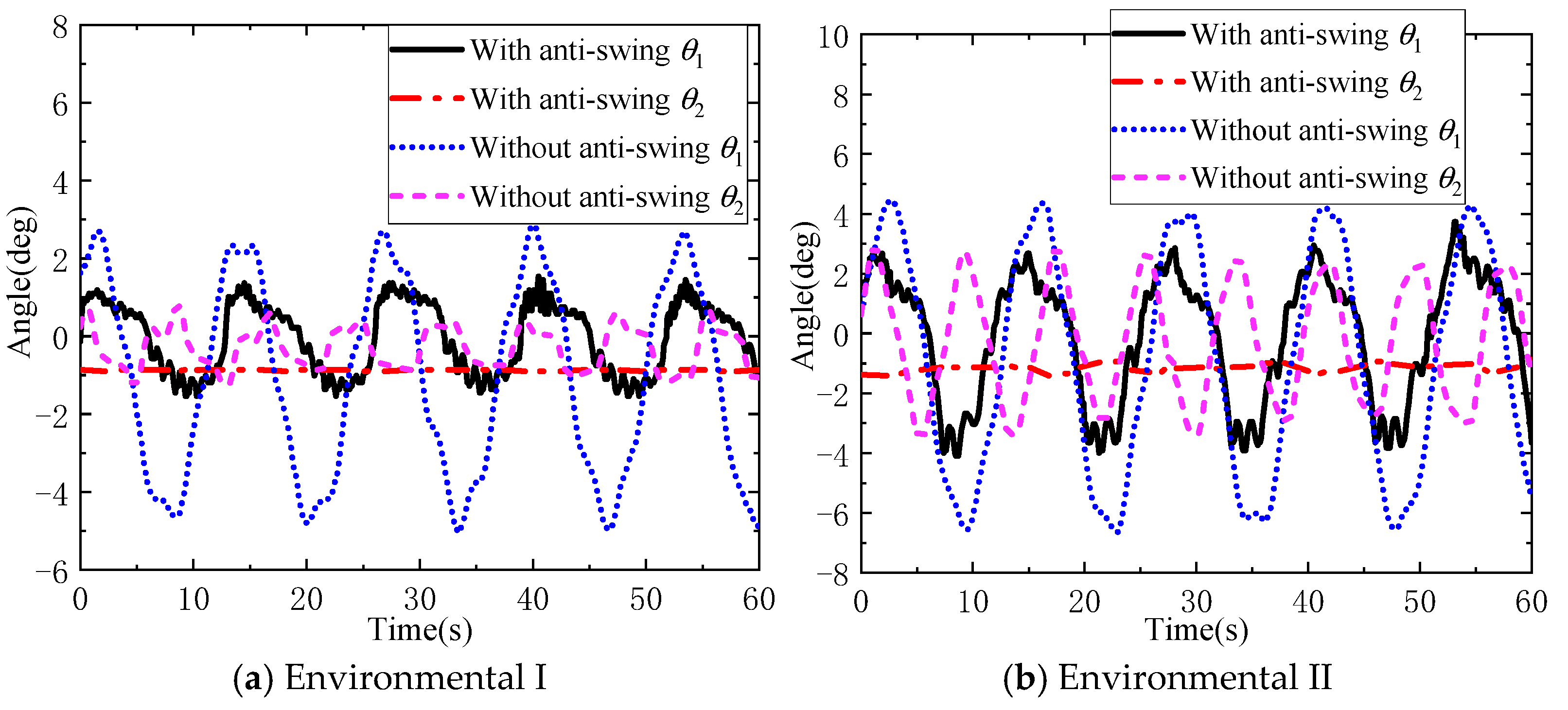
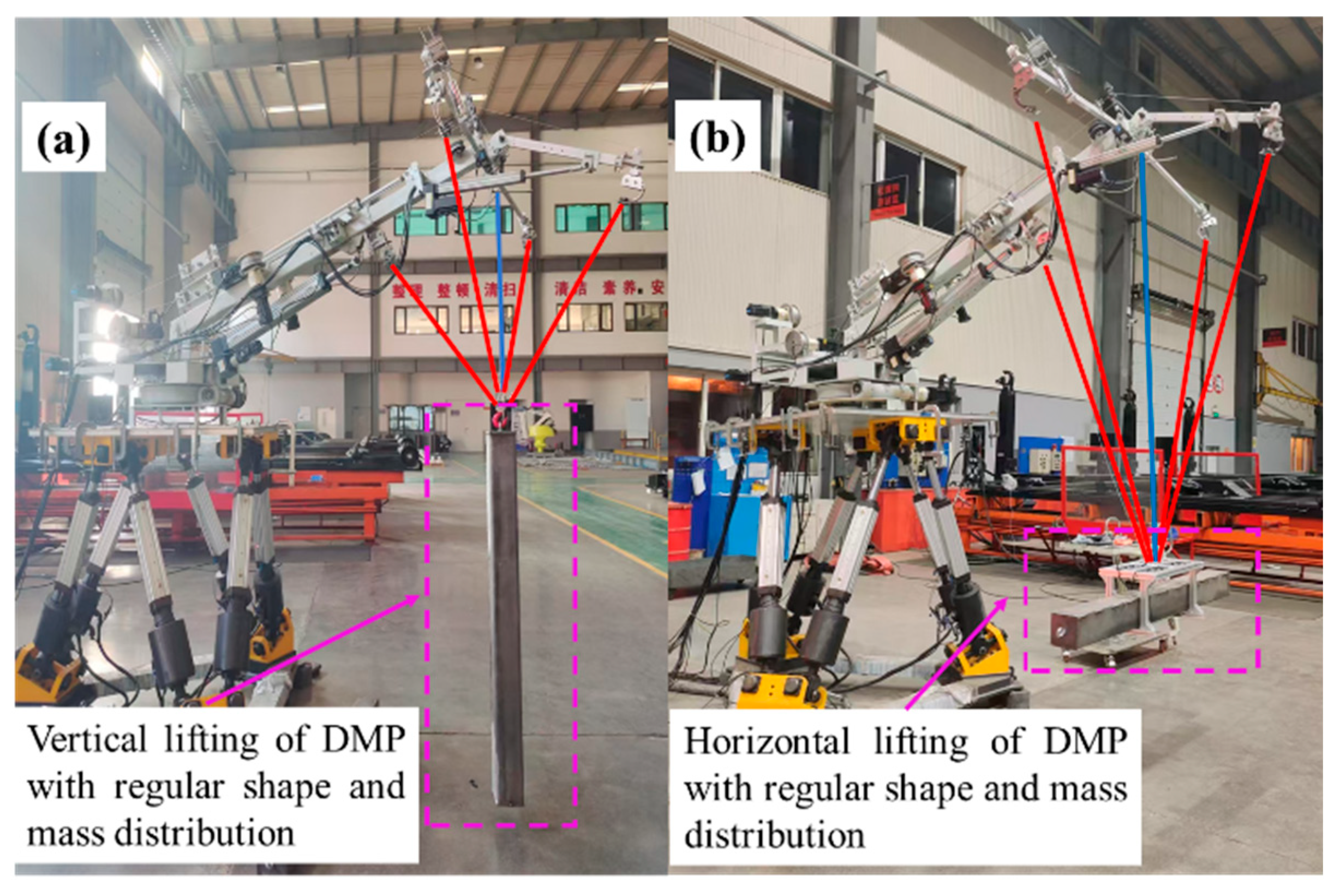
4.1. DMP Anti-Swing Experiment with Regular Shape and Mass Distribution
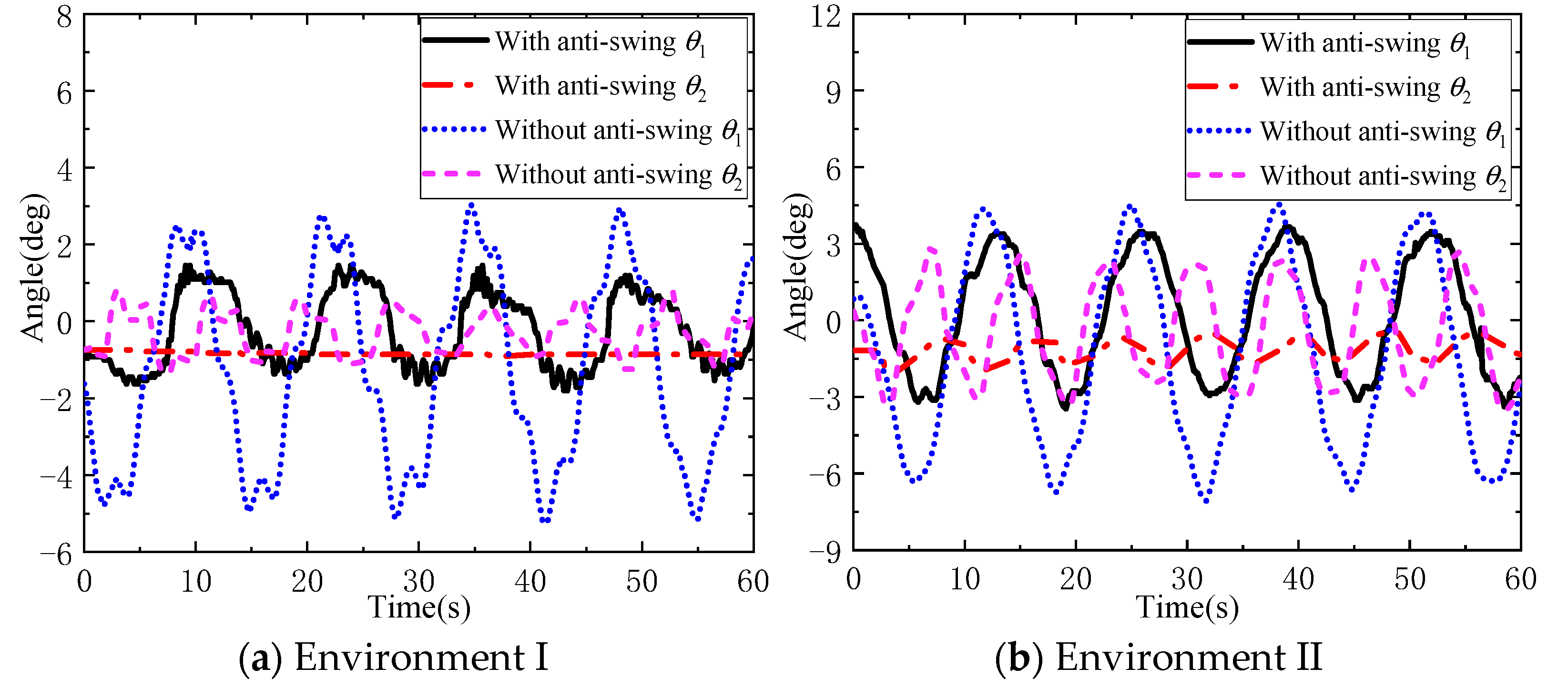
4.2. DMP Anti-Swing Experiment with Irregular Shape and Mass Distribution
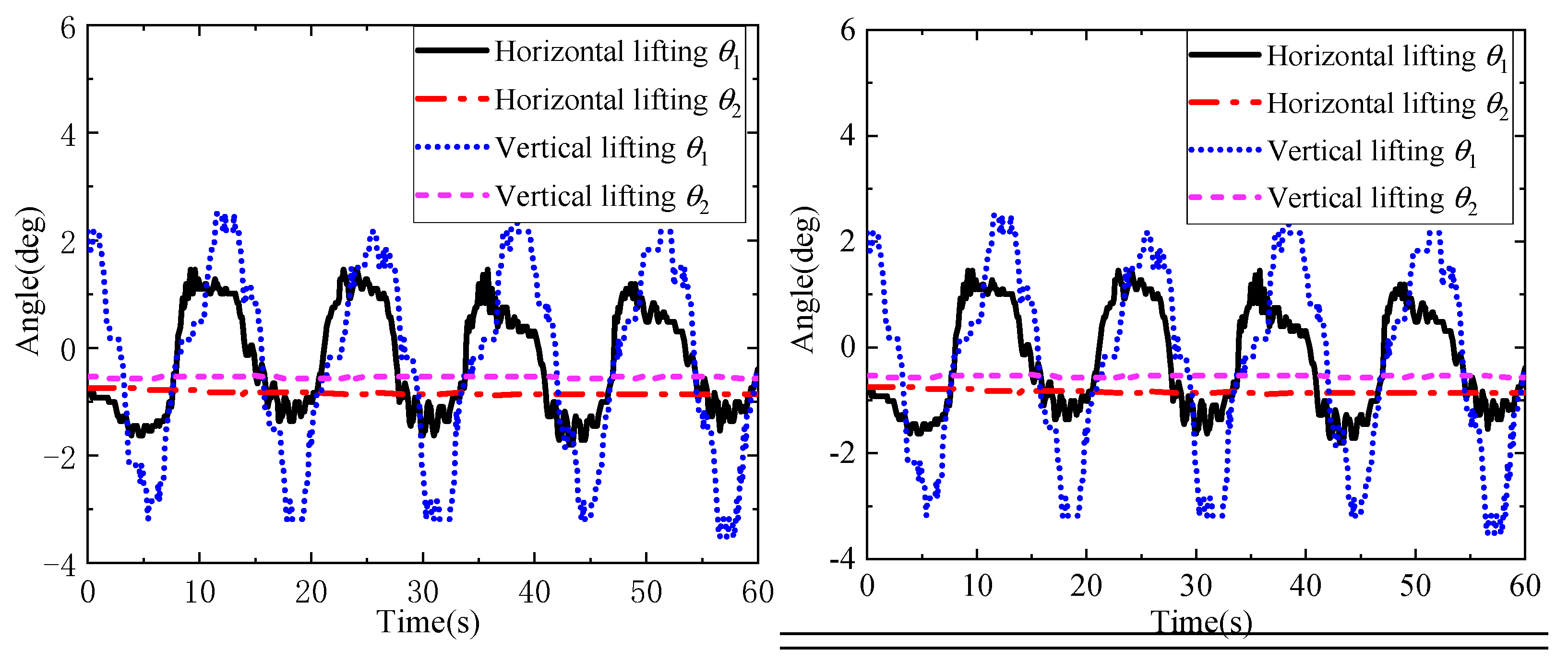
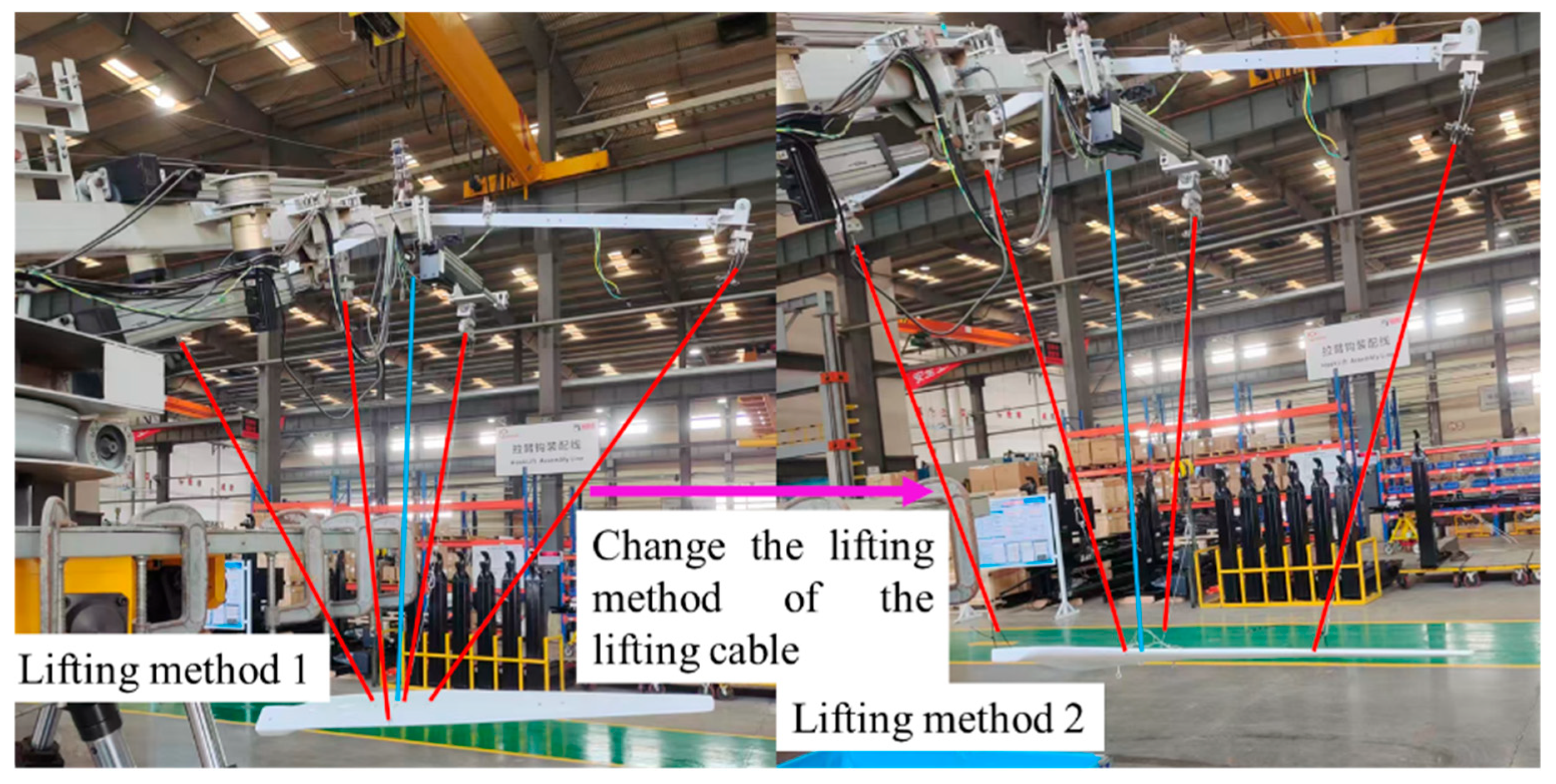
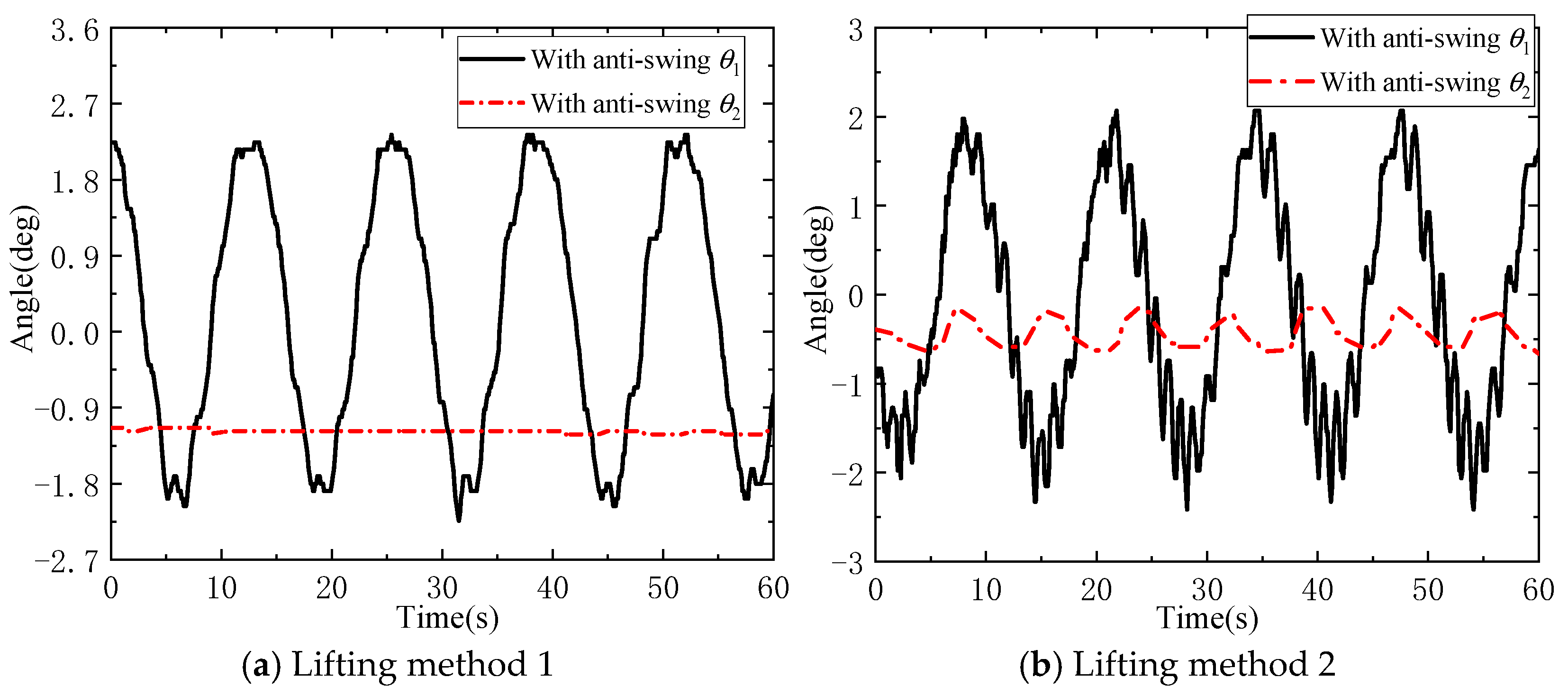
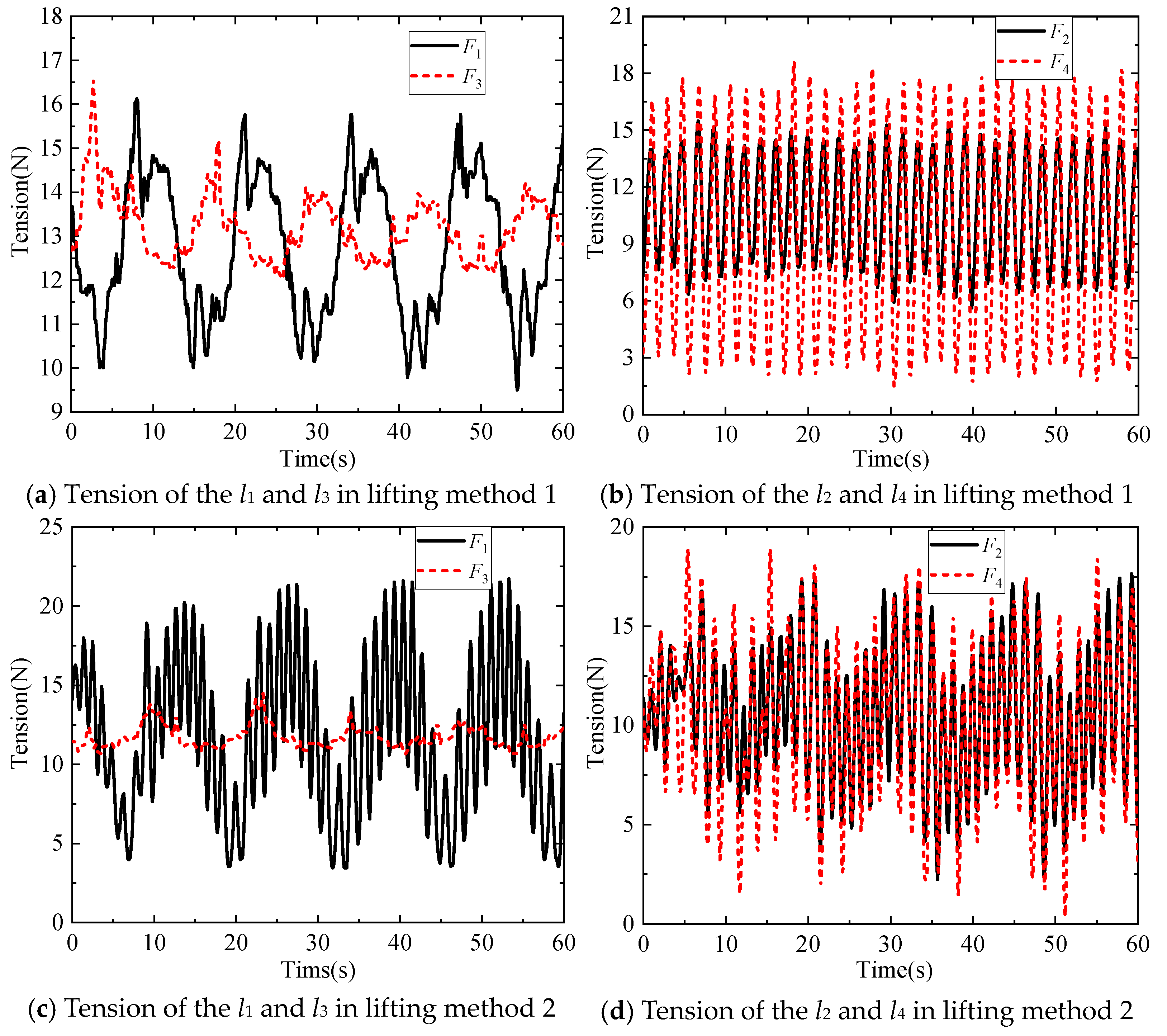
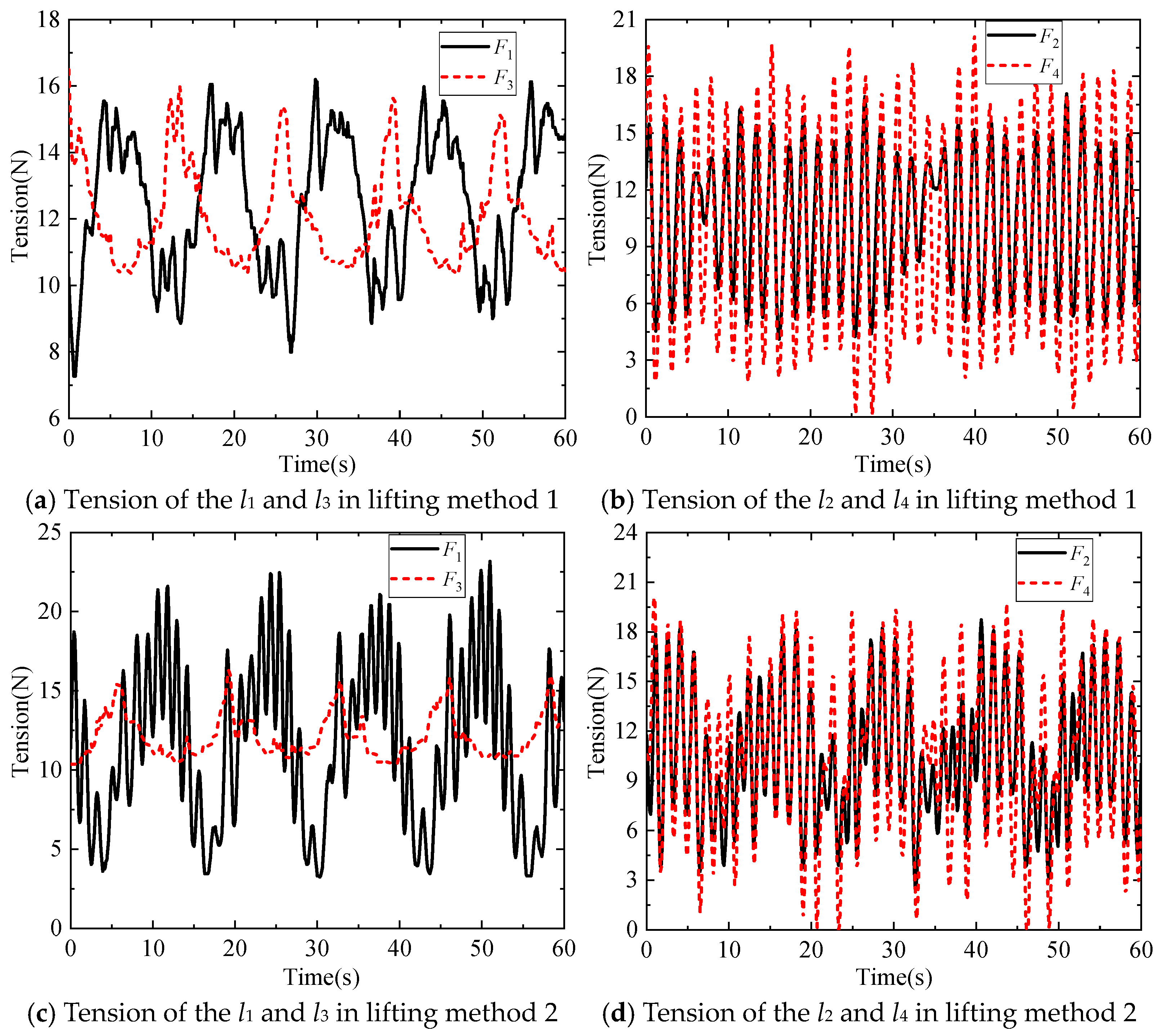
4.3. Irregularly Shaped DMP Anti-Swing Experiment Under Different Lifting Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ren, Z.; Verma, A.S.; Ataei, B.; Halse, K.H.; Hildre, H.P. Model-free anti-swing control of complex-shaped payload with offshore floating cranes and a large number of lift wires. Ocean Eng. 2021, 228, 108868. [Google Scholar] [CrossRef]
- Huang, J.; Liang, Z.; Zang, Q. Dynamics and swing control of double-pendulum bridge cranes with distributed-mass beams. Mech. Syst. Signal Pr. 2015, 54, 357–366. [Google Scholar] [CrossRef]
- Tang, R.; Huang, J. Control of bridge cranes with distributed-mass payloads under windy conditions. Mech. Syst. Signal Pr. 2016, 72, 409–419. [Google Scholar] [CrossRef]
- Sun, Z.; Ouyang, H. Adaptive fuzzy tracking control for vibration suppression of tower crane with distributed payload mass. Automat. Constr. 2022, 142, 104521. [Google Scholar] [CrossRef]
- Yang, L.; Ouyang, H. Precision-positioning adaptive controller for swing elimination in three-dimensional overhead cranes with distributed mass beams. ISA T. 2022, 127, 449–460. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, X.; Hua, L.; Xia, M. Dynamic analysis and time optimal anti-swing control of double pendulum bridge crane with distributed mass beams. Mech. Syst. Signal Pr. 2020, 144, 106968. [Google Scholar] [CrossRef]
- Miao, X.; Yang, L.; Ouyang, H. Artificial-neural-network-based optimal Smoother design for oscillation suppression control of underactuated overhead cranes with distributed mass beams. Mech. Syst. Signal Pr. 2023, 200, 110497. [Google Scholar] [CrossRef]
- Wang, T.; Tan, N.; Zhang, X.; Li, G.; Su, S.; Zhou, J.; Scotti, F. A time-varying sliding mode control method for distributed-mass double pendulum bridge crane with variable parameters. IEEE Access 2021, 9, 75981–75992. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, N.; Wang, X. Equivalent rope length-based trajectory planning for double pendulum bridge cranes with distributed mass payloads. Actuators 2022, 11, 25. [Google Scholar] [CrossRef]
- Wu, Q.; Sun, N.; Yang, T.; Fang, Y. Deep reinforcement learning-based control for asynchronous motor-actuated triple pendulum crane systems with distributed mass payloads. IEEE T. Ind. Electron. 2023, 71, 1853–1862. [Google Scholar] [CrossRef]
- Albus, J.S.; Bostelman, R.V.; Dagalakis, N. The NIST robocrane. J. Res. Natl. Inst. of Stan. 1992, 97, 373–385. [Google Scholar] [CrossRef] [PubMed]
- Gorman, J.J.; Jablokow, K.W.; Cannon, D.J. The cable array robot: Theory and experiment. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; pp. 2804–2810. [Google Scholar]
- Hiller, M.; Fang, S.; Mielczarek, S.; Verhoeven, R.; Franitza, D. Design, analysis and realization of tendon-based parallel manipulators. Mech. Mach. Theory 2005, 40, 429–445. [Google Scholar] [CrossRef]
- Bosscher, P.; Williams II, R.L.; Bryson, L.S.; Castro-Lacouture, D. Cable-suspended robotic contour crafting system. Automat. Constr. 2007, 17, 45–55. [Google Scholar] [CrossRef]
- Lamaury, J.; Gouttefarde, M.; Chemori, A.; Hervé, P.E. Dual-space adaptive control of redundantly actuated cable-driven. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4879–4886. [Google Scholar]
- Korayem, M.H.; Bamdad, M.; Tourajizadeh, H.; Korayem, A.H.; Zehtab, R.M.; Shafiee, H.; Arvani, A. Experimental results for the flexible joint cable-suspended manipulator of ICaSbot. Robotica 2013, 31, 887–904. [Google Scholar] [CrossRef]
- Revolutionary Crane Technology Is in Navy’s Future. Available online: https://www.nre.navy.mil/media-center/news (accessed on 2 May 2025).
- Jung, Y.; Jang, I.G.; Kwak, B.M.; Kim, Y.K.; Kim, Y.; Kim, S.; Kim, E.H. Advanced sensing system of crane spreader motion (for mobile harbor). In Proceedings of the 2012 IEEE International Systems Conference SysCon 2012, Vancouver, BC, Canada, 19–22 March 2012; pp. 1–5. [Google Scholar]
- Kim, Y.K.; Kim, Y.; Jung, Y.S.; Jang, I.G.; Kim, K.S.; Kim, S.; Kwak, B.M. Developing accurate long-distance 6-DOF motion detection with one-dimensional laser sensors: Three-beam detection system. IEEE T. Ind. Electron. 2012, 60, 3386–3395. [Google Scholar]
- Kim, E.H.; Jung, Y.S.; Yu, Y.; Kwon, S.; Ju, H.; Kim, S.; Kim, K.S. An advanced cargo handling system operating at sea. Int. J. Control Autom. 2014, 12, 852–860. [Google Scholar] [CrossRef]
- Hu, Y.; Tao, L.; Lv, W. Anti-pendulation analysis of parallel wave compensation systems. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2016, 230, 177–186. [Google Scholar] [CrossRef]
- Wang, J.; Wang, S.; Chen, H.; Niu, A.; Jin, G. Dynamic modeling and analysis of the telescopic sleeve antiswing device for shipboard cranes. Math. Probl. Eng. 2021, 2021, 6685816. [Google Scholar] [CrossRef]
- Zhao, T.; Sun, M.; Wang, S.; Han, G.; Wang, H.; Chen, H.; Sun, Y. Dynamic analysis and robust control of ship-mounted crane with multi-cable anti-swing system. Ocean Eng. 2024, 291, 116376. [Google Scholar] [CrossRef]
- Jin, G.; Wang, S.; Wang, J.; Wang, B.; Sun, Y.; Chen, H. Research on double pendulum anti-swing of cable-driven multi-point collaborative lifting for shipboard boom crane based on tension optimization. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2025, 14750902251323653. [Google Scholar] [CrossRef]
- Wu, Q.; Ouyang, H.; Xi, H. Adaptive nonlinear control for 4-DOF ship-mounted rotary cranes. Int. J. Robust Nonlin. 2023, 33, 1957–1972. [Google Scholar] [CrossRef]
- Cao, M.; Xu, M.; Gao, Y.; Wang, T.; Deng, A.; Liu, Z. Advanced Control for Shipboard Cranes with Asymmetric Output Constraints. J. Mar. Sci. Eng. 2025, 13, 91. [Google Scholar] [CrossRef]
- Mohd Tumari, M.Z.; Ahmad, M.A.; Suid, M.H.; Ghazali, M.R.; Tokhi, M.O. An improved marine predators algorithm tuned data-driven multiple-node hormone regulation neuroendocrine-PID controller for multi-input–multi-output gantry crane system. J. Low Freq. Noise V. A. 2023, 42, 1666–1698. [Google Scholar] [CrossRef]
- Zhu, B.; Li, E.; Zhao, T.; Wang, C.; Tang, Z.; Li, Z. Dynamic characteristics of series-parallel hybrid rigid-flexible coupling double-mass underactuated system on floating platform. Mech. Mach. Theory 2023, 179, 105132. [Google Scholar] [CrossRef]
- Leimeister, M.; Balaam, T.; Causon, P.; Cevasco, D.; Richmond, M.; Kolios, A.; Brennan, F. Human-free offshore lifting solutions. J. Phys. Conf. Ser. 2018, 1102, 012030. [Google Scholar] [CrossRef]
- Jiang, Z. Installation of offshore wind turbines: A technical review. Renew. Sust. Energ. Rev. 2021, 139, 110576. [Google Scholar] [CrossRef]
- Ren, Z.; Huang, Z.; Zhao, T.; Wang, S.; Chen, H.; Sun, Y.; Fang, N. Research on dynamic modeling and control strategy of four anti-swing cable system for ship-mounted cranes. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2025, 239, 399–417. [Google Scholar] [CrossRef]
- Youssef, K.; Otis, M.J.D. Reconfigurable fully constrained cable driven parallel mechanism for avoiding interference between cables. Mech. Mach. Theory 2020, 148, 103781. [Google Scholar] [CrossRef]
- An, H.; Yuan, H.; Tang, K.; Xu, W.; Wang, X. A novel cable-driven parallel robot with movable anchor points capable for obstacle environments. IEEE/ASME T. Mech. 2022, 27, 5472–5483. [Google Scholar] [CrossRef]
- Woziwodzki, S. Application of morison equation in unsteady mixing characteristics. In Practical Aspects of Chemical Engineering: Selected Contributions from PAIC 2019; Springer International Publishing: Cham, Switzerland, 2020; ISBN 9783030398675. [Google Scholar]
- Miloh, T. Hamilton’s principle, Lagrange’s method, and ship motion theory. J. Ship Res. 1984, 28, 229–237. [Google Scholar] [CrossRef]
- Cao, T.; Zhang, X. Nonlinear decoration control based on perturbation of ship longitudinal motion model. Appl. Ocean Res. 2023, 130, 103412. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter Values |
|---|---|
| Elastic modulus E/Gpa | 20 |
| Cable diameter d/m | 3 × 10−3 |
| Cross-sectional area without elastic deformation S0/m2 | 7.069 × 10−4 |
| Line density without deformation ρ/kg m | 0.065 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| L | 116 m | B | 18 m |
| D | 8.35 m | d | 5.4 m |
| ▽ | 5710.2 m3 | GM | 1.71 m |
| GN | 4.93 m | KG | 6.45 m |
| ω1 | 0.607 rad/s | ω2 | 0.562 rad/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, G.; Wang, S.; Gao, Y.; Sun, M.; Chen, H.; Sun, Y. Dynamic Analysis and Experimental Research on Anti-Swing Control of Distributed Mass Payload for Marine Cranes. J. Mar. Sci. Eng. 2025, 13, 1112. https://doi.org/10.3390/jmse13061112
Jin G, Wang S, Gao Y, Sun M, Chen H, Sun Y. Dynamic Analysis and Experimental Research on Anti-Swing Control of Distributed Mass Payload for Marine Cranes. Journal of Marine Science and Engineering. 2025; 13(6):1112. https://doi.org/10.3390/jmse13061112
Chicago/Turabian StyleJin, Guoliang, Shenghai Wang, Yufu Gao, Maokai Sun, Haiquan Chen, and Yuqing Sun. 2025. "Dynamic Analysis and Experimental Research on Anti-Swing Control of Distributed Mass Payload for Marine Cranes" Journal of Marine Science and Engineering 13, no. 6: 1112. https://doi.org/10.3390/jmse13061112
APA StyleJin, G., Wang, S., Gao, Y., Sun, M., Chen, H., & Sun, Y. (2025). Dynamic Analysis and Experimental Research on Anti-Swing Control of Distributed Mass Payload for Marine Cranes. Journal of Marine Science and Engineering, 13(6), 1112. https://doi.org/10.3390/jmse13061112