
From 6G to SeaX-G: Integrated 6G TN/NTN for AI-Assisted Maritime Communications—Architecture, Enablers, and Optimization Problems

 ,
,  ,
,  ,
,  ,
, 
 and
and
Abstract
1. Introduction
1.1. The Emergence of 6G in Maritime Communications
1.2. Related Works
1.3. Paper Scope and Structure
2. Evolution of Maritime Communication Networks
2.1. Legacy Wireless Maritime Networks
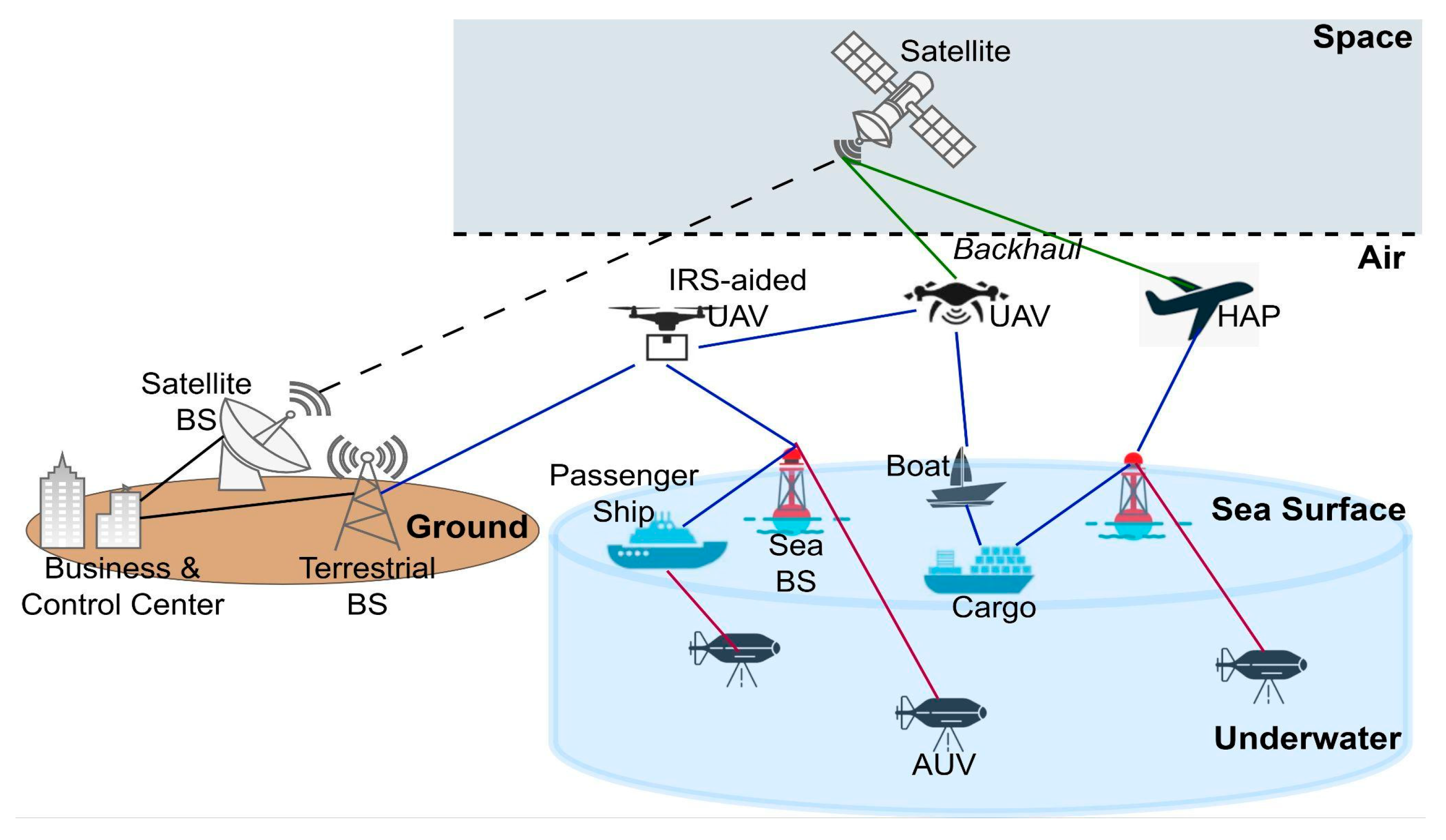
2.2. Reference Architecture of Multi-Layered MCNs
2.3. Communication Links and Technologies
- Satellite to Ground Communication: This link connects satellites to terrestrial stations or control centers, serving as the global backhaul for data traffic, remote control, and coordination. Satellite Base Stations (Sat-BS) use L, Ku, Ka, and Q/V bands, with newer 6G systems exploring optical satellite communication for extremely high-throughput and low-latency links. These links require robust atmospheric compensation and precise beam steering to maintain high performance [33].
- Satellite to UAV/HAP Communication: Satellites also interface with HAPs and UAVs to extend coverage in areas with no direct ground access. These links are critical for data offloading, relaying, and supporting edge computing in the sky. Communication is typically realized via mmWave backhaul (e.g., Ka/Q/V bands) or laser communication systems, enabling high-rate data transfers and latency-sensitive coordination.
- UAV/HAP to Ship/Sea BS Communication: Airborne platforms such as UAVs and HAPs establish air-to-sea links with moving vessels and floating platforms (e.g., buoys or Sea BS). These links may leverage sub-6 GHz for robust coverage and mmWave or THz for high-throughput, low-latency applications. Reconfigurable Intelligent Surfaces (RIS) mounted on UAVs or buoys can dynamically optimize beam directionality and link quality in challenging maritime conditions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Technology | Frequency Band |
|---|---|---|
| Satellite ↔ Ground | SATCOM, Ka/Q/V-band, Optical Comm | L, Ku, Ka, Q/V, Optical |
| Satellite ↔ HAP/UAV | LaserComm, mmWave, Backhaul | Ka/Q/V bands, Optical |
| HAP/UAV ↔ Ships/Sea BS | mmWave, THz, Sub-6 GHz, IRS-assisted links | 3.5 GHz, 28 GHz, >100 GHz (THz) |
| Ground BS ↔ Ships (Nearshore) | 5G NR, LTE, MIMO | Sub-6 GHz, 24–28 GHz |
| UAV ↔ UAV, UAV ↔ IRS UAV | mmWave/THz, RIS beam coordination | 60 GHz, >120 GHz |
| Ship ↔ Ship/Buoy (S2S) | LTE, Wi-Fi 6, VHF/UHF | 156–174 MHz (VHF), 2.4/5 GHz, LTE bands |
| Ship/Buoy ↔ AUV (Underwater) | Acoustic, Optical, Magnetic Induction | kHz (acoustic), 450–550 nm (optical), LF EM |
| Buoy ↔ Satellite | SATCOM, Ka/Q/V | Ka, Q/V |
- Ground BS to Ship Communication: In nearshore waters or harbor zones, terrestrial 5G base stations provide service to ships using 5G NR, massive MIMO, and beamforming technologies. Operating mainly in sub-6 GHz and mmWave (e.g., 24–28 GHz) bands, these links support high-bandwidth and real-time services such as video surveillance, automated docking, and data offloading. However, they are subject to coverage limitations due to the curvature of the Earth and sea-level obstructions.
- UAV to UAV, or UAV to IRS-UAV Communication: This category supports aerial mesh networking among UAVs, often using directional mmWave or THz links for rapid data exchange, fleet coordination, and redundancy. RIS-equipped UAVs can help reflect or boost weak signals when direct LoS is unavailable, supporting multi-hop relaying and network robustness.
- Ship-to-Ship and Ship-to-Buoy (S2S/S2Sh) Communication: Ships, buoys, and other sea surface elements communicate over short-to-medium distances using Wi-Fi 6, LTE, 5G, or legacy VHF/UHF radios. These links support real-time situational awareness, collaborative routing, maritime traffic safety, and IoT-based sensor communication. They operate in Industrial, Scientific, and Medical (ISM) bands (2.4/5 GHz) and dedicated maritime VHF bands (156–174 MHz).
- Ship/Buoy to Underwater Communication: Underwater links are primarily supported by acoustic communication, which enables low-data-rate but long-distance propagation. In short-range scenarios, optical blue-green links (450–550 nm) provide higher data rates with tight alignment constraints [30]. Magnetic induction is used for very short-range, high-reliability exchanges, such as docking or underwater sensor data harvesting [31].
- Buoy to Satellite Communication: Floating buoys equipped with satellite modems serve as relay nodes for data from underwater sensors or ships in remote areas. These links typically operate in Ka-band or Q/V bands, offering connectivity to satellites even when other networks are unavailable.
2.4. Five/Sixth-Generation-Enabling Technologies
2.5. Current Challenges and Limitations in MCNs
2.6. Security and Trust Considerations in 6G-Enabled MCNs
3. Overview of 6G Technologies
3.1. Key 6G Features
- THz Communications [47]: THz bands promise to overcome the bandwidth limitations of existing mmWave systems by enabling ultra-high-speed links with terabit-per-second throughput and microsecond-level latency. This is especially useful for short-range, high-data-rate applications such as UAV-to-ship or UAV-to-HAP transmissions in dense maritime scenarios.
- AI-Native Network Architecture [48]: Unlike 5G, which relies on external AI-based management tools, 6G is envisioned to have intelligence built into its core. This allows for real-time self-optimization, predictive resource allocation, and autonomous fault management—key requirements for supporting highly mobile and infrastructure-sparse maritime environments.
- RIS-assisted Propagation [49]: RIS technology introduces intelligent, reflective surfaces that can manipulate signal propagation to enhance coverage and signal strength. Deployed on UAVs or buoys, RIS can dynamically compensate for NLOS conditions and improve energy efficiency across maritime links.
- Integrated Sensing and Communication (ISAC) [50]: By merging radar sensing and communication into a unified system, ISAC allows maritime platforms to simultaneously detect, track, and communicate. This dual capability can support object avoidance, environmental awareness, and seamless data exchange with minimal spectrum overhead.
- Ubiquitous Connectivity via Non-Terrestrial Networks (NTNs) [51]: 6G integrates satellites, UAVs, and high-altitude platforms to create a truly global network fabric. For MCNs, this ensures reliable communication even in remote oceans, polar routes, and disaster-struck zones where terrestrial infrastructure is unavailable or inoperable.
- Blockchain and Post-Quantum Security (PQS) [52]: To meet the growing demand for secure and tamper-proof maritime communication, 6G will incorporate blockchain for decentralized trust and post-quantum cryptographic algorithms to resist emerging threats from quantum computing.
- Digital Twins for Network and Platform Optimization [53]: 6G enables the real-time synchronization of physical maritime systems such as ships, sensors, and networks—with their virtual counterparts. These digital twins can be used for predictive maintenance, energy optimization, and operational simulations, significantly enhancing situational awareness and decision-making.
- Joint Communication and Compute Co-Design [38]: Rather than treating communication and computation separately, 6G co-optimizes them to reduce latency and improve reliability. This is particularly advantageous in MCNs, where real-time edge intelligence onboard ships or UAVs is necessary to reduce dependence on delayed satellite links.
- Maritime Integrated Access and Backhaul (mIAB) [54]: IAB allows the same radio infrastructure to provide both user access and backhaul connectivity, reducing reliance on wired or dedicated satellite backhaul links. When extended to the maritime domain, mIAB enables dynamic relaying and flexible extension of 5G coverage using vessels or UAVs as intermediate nodes that perform both access and forwarding functions. As discussed in [54], mIAB can be particularly effective in port environments or offshore clusters, where deploying fixed infrastructure is impractical. This mechanism supports scalable, low-cost deployment and may serve as a bridge toward full 6G coverage over oceans by improving network densification and connectivity in coverage-limited zones.
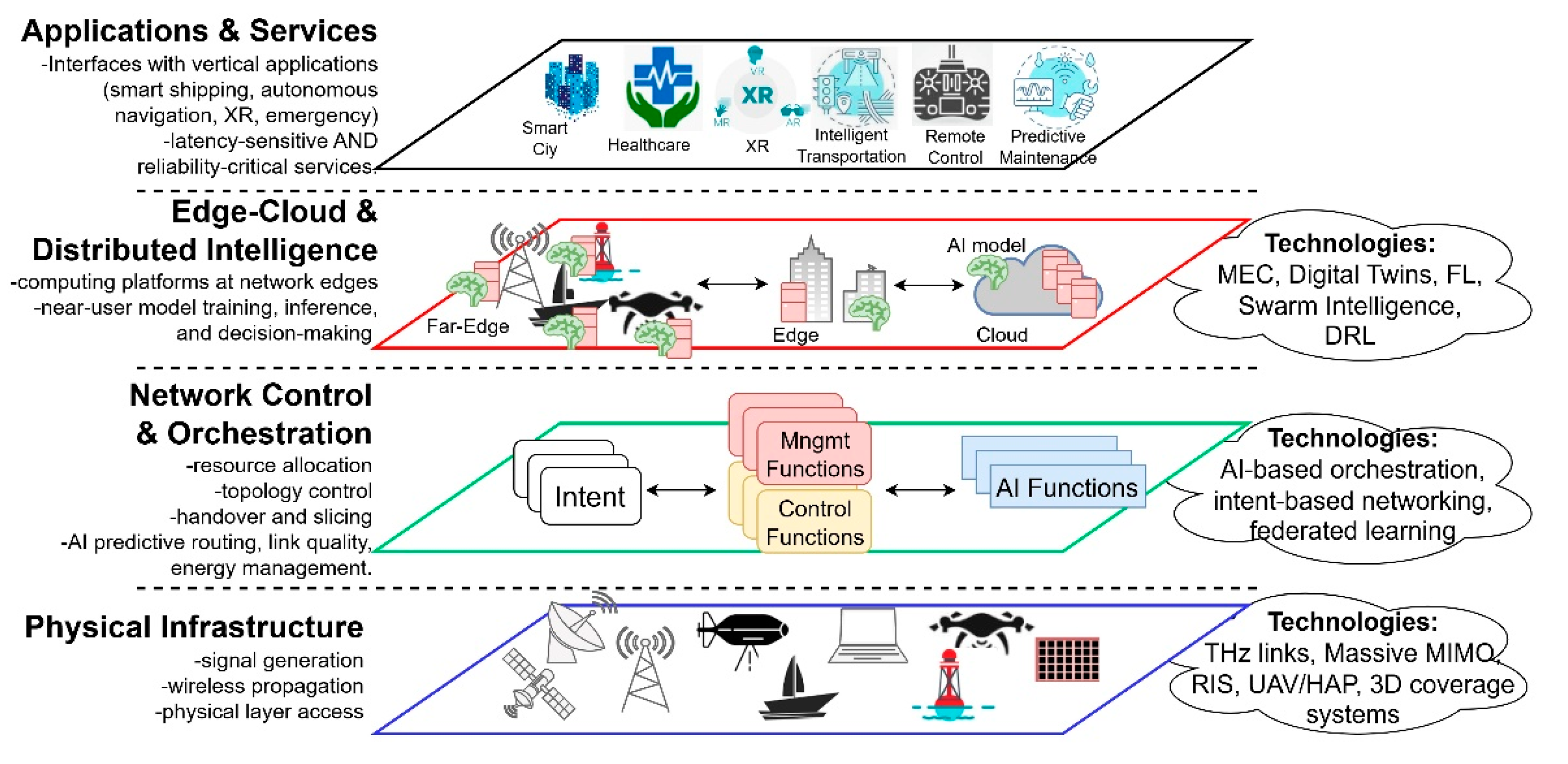
3.2. General Multi-Level 6G Architecture
- Physical Infrastructure Layer: At the bottom of the architecture lies the physical infrastructure, consisting of diverse communication and sensing elements such as terrestrial BSs, UAVs, HAPs, satellites, underwater nodes, vehicles, and RISs. This layer is responsible for signal generation and propagation, physical layer access, and 3D coverage deployment across ground, air, sea, and underwater domains. Key enabling technologies at this layer include THz communication links for ultra-high-speed transmission, massive MIMO for spatial multiplexing and beamforming, RIS for energy-efficient signal redirection, UAVs/HAPs/satellites for non-terrestrial and 3D global coverage [47].
- Network Control and Orchestration Layer: The next layer hosts the control and management functions needed to operate and coordinate the underlying physical resources. It introduces intent-based networking, where high-level objectives are translated into optimized network configurations, potentially using AI-driven orchestration [55]. This layer performs resource allocation and slicing, mobility management and handover control, topology reconfiguration and adaptive routing, and energy-aware and reliability-sensitive decisions. Key technologies that are supported in this layer include AI-based orchestration frameworks, federated learning for distributed control, autonomous network management agents and policy engines.
- Edge-Cloud and Distributed Intelligence Layer: A key innovation of 6G lies in the distribution of intelligence and computation across multiple layers of the network—from cloud to edge to far edge [39]. This allows network nodes such as ships, UAVs, or buoys to process data locally, reducing latency and improving resilience in disconnected or delay-tolerant scenarios. This layer supports real-time AI model inference and training at the edge, offloading decisions between ship-side, UAV-based, or cloud-based nodes, and local predictive analytics (e.g., for route optimization system failures). Enabling technologies include MEC, digital Twins for ships and platforms, FL for privacy-preserving AI, Swarm intelligence and Deep Reinforcement Learning (DRL) for adaptive control.
- Applications and Services Layer: At the top of the stack, this layer interfaces directly with vertical sectors that will benefit from 6G’s enhanced capabilities. These services are not only bandwidth-intensive but also latency-critical and reliability-sensitive, requirements which are central to 6G’s design. Typical applications include smart shipping and autonomous navigation, healthcare (e.g., remote diagnostics, tele-surgery), Extended Reality (XR) and immersive entertainment onboard, remote control of autonomous maritime assets, predictive maintenance of ships and offshore platforms [15]. As such, this layer emphasizes cross-domain integration, enabling AI models and services to span edge devices, the cloud, and application endpoints seamlessly.
4. AI-Driven Concepts in MCNs
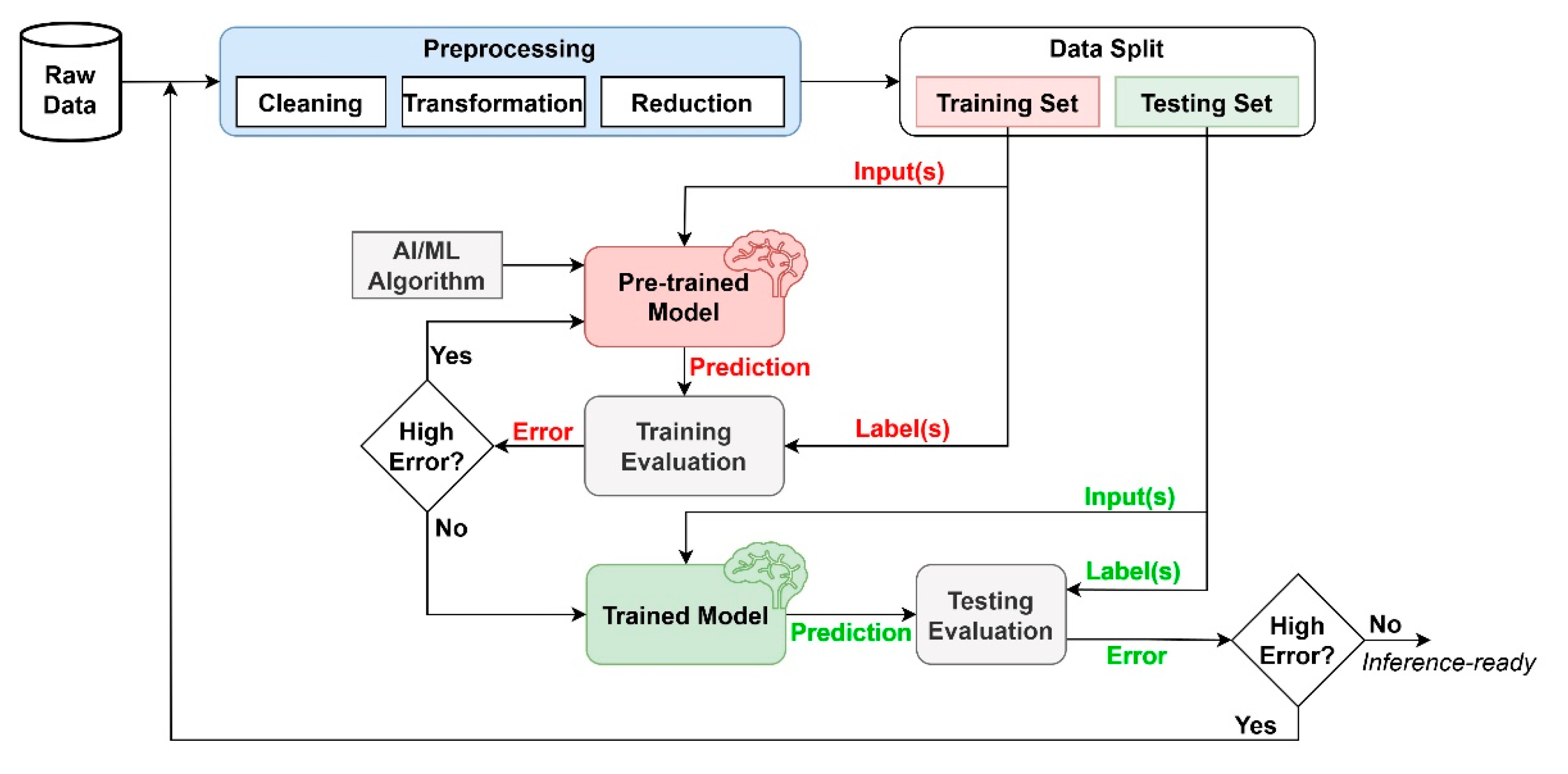
4.1. Conventional AI/ML Methods
- Predictive maintenance: By labeling historical sensor readings (e.g., vibrations, temperature) with failure events, supervised models (like Random Forests or Neural Networks) can predict when components like engines or communication modules are likely to fail [40].
- Vessel/Traffic classification: Based on features like movement patterns, communication signatures, or radar echoes, ships can be automatically categorized (e.g., cargo, tanker, fishing) to assist with traffic control or border security [58].
- Weather-aware routing: SL models can learn to forecast wave height, storms, or sea temperature patterns based on labeled environmental data. This may help to learn optimal paths and predict environmental hazards based on historical weather and performance outcomes [59].
- Anomaly detection: With UL, it is feasible to identify unusual communication or behavior patterns (e.g., sudden route deviation) [60].
- Clustering for traffic modeling: Clustering algorithms (like K-Means DBSCAN) can group ships by trajectory behavior to identify outliers [61].
- Sensor data compression: UL can also cluster sensor streams with similar characteristics to compress data before satellite uplink, saving bandwidth [62]. This can be completed by Principal Component Analysis (PCA) or autoencoders, which can learn compact representations of sensor data and flag unusual deviations from typical patterns as potential faults or security threats.
- Ship activity classification with low-size data: Given that acquiring labeled data from resource-constrained devices (e.g., from AUVs or remote sensors), SemiSL may help to train a behavior classification model with limited expert-labeled data and automatically generalize to new traffic data [63].
- Early fault detection: SemiSL can use a few known fault events to improve recognition across large unlabeled sensor datasets [64].

4.2. Decision-Making AI/ML Methods
- Dynamic adaptive routing: Ships or UAVs can learn optimal routing strategies that minimize fuel use, avoid congestion, or maintain strong communication links in changing sea/weather conditions [65].
- Power control and spectrum management: In networks where resources are shared (e.g., RIS-assisted UAV relays), agents can learn to allocate power or frequency dynamically for maximum efficiency (e.g., maximize throughput and minimize interference) [66].
- UAV/AUV path planning: UAVs can learn energy-efficient mission paths while maintaining data links. Underwater vehicles operating in hostile, GPS-denied environments can learn robust paths that conserve energy while maintaining intermittent connectivity with sea BSs or buoys [67].
- Fleet coordination: Learn optimal positioning and relaying strategies among collaborative vessels and UAVs to improve network throughput and reliability [68].

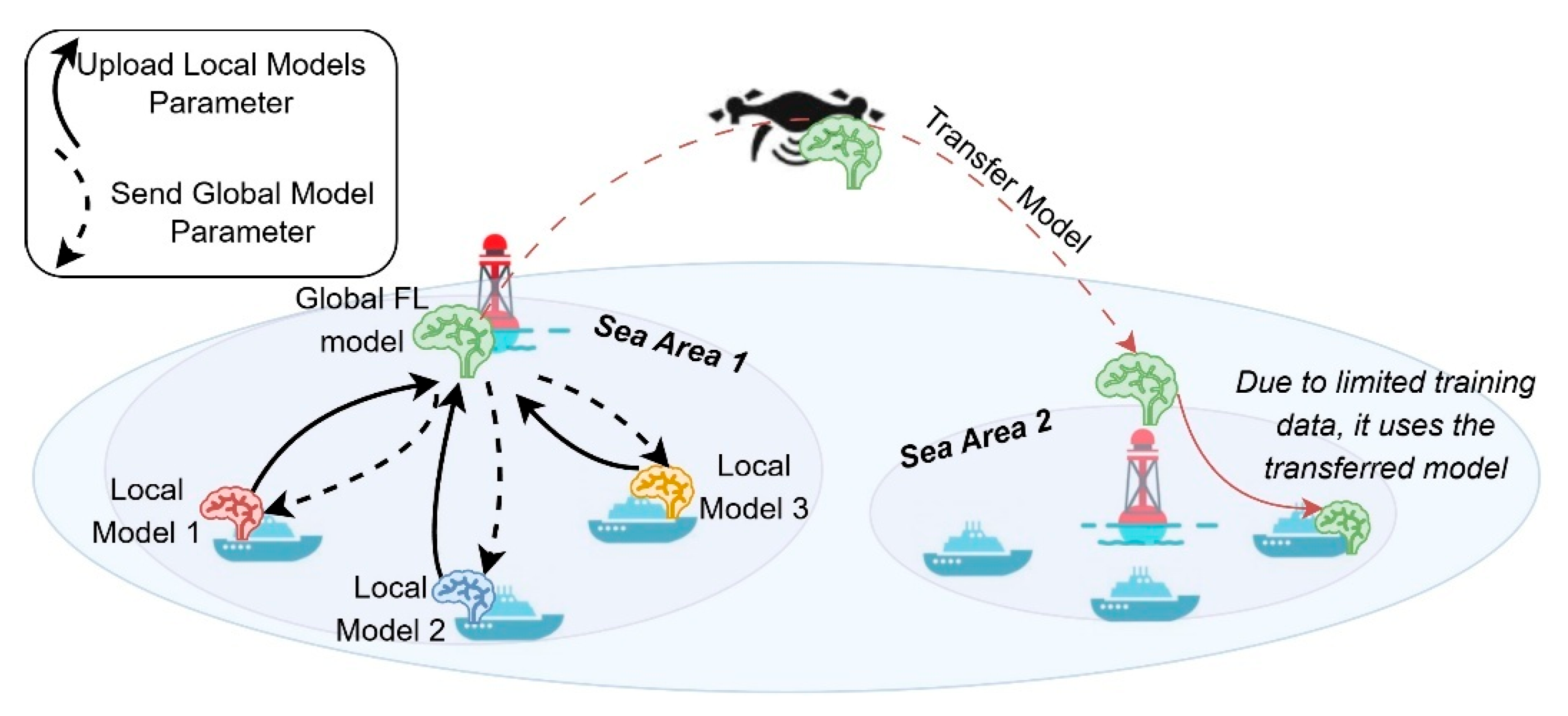
4.3. Multi-Client AI/ML Methods
- Collaborative diagnostics: FL can securely enable each vessel to train a local model for fault prediction and share updates to build a robust global model [70].
- Swarm intelligence-based threat detection: AUVs and UAVs share model updates through FL to detect environmental hazards or intrusions [5].
- Decentralized predictive routing: Ships in a cluster learn shared FL models to predict optimal next-hop links based on their individual experiences [71].
- Environmental transfer: Models trained in the Mediterranean on vessel routing can be transferred and adapted to Arctic shipping lanes with a few localized updates.
- Port-to-ship adaptation: A model trained on container flow data in a smart port can be transferred and fine-tuned to predict cargo handling efficiency aboard a vessel [72].
4.4. Generative AI/ML Methods
- Generation of synthetic sensor data: Useful for training AI/ML models when collecting real samples (e.g., deep-sea anomaly events) is hard to collect.
- AIS traffic generation: For testing routing algorithms or intrusion detection systems without deploying real ships.
- Creation of training data for rare faults: GANs can simulate noisy patterns associated with unusual mechanical or communication failures.

4.5. Lightweight AI/ML Methods
- Lightweight inference at the edge: Knowledge distillation allows for on-ship diagnostics or onboard object detection by using distilled or pruned models for real-time tasks.
- Hierarchical decision-making: Complex teacher models can handle strategic planning, while small-scale student models can operate in real-time at the edge.
- Model compression: Using distillation to compress large predictive models (e.g., collision forecasting) for onboard inference without cloud dependence.
5. Potential 6G Applications in the Maritime Sector
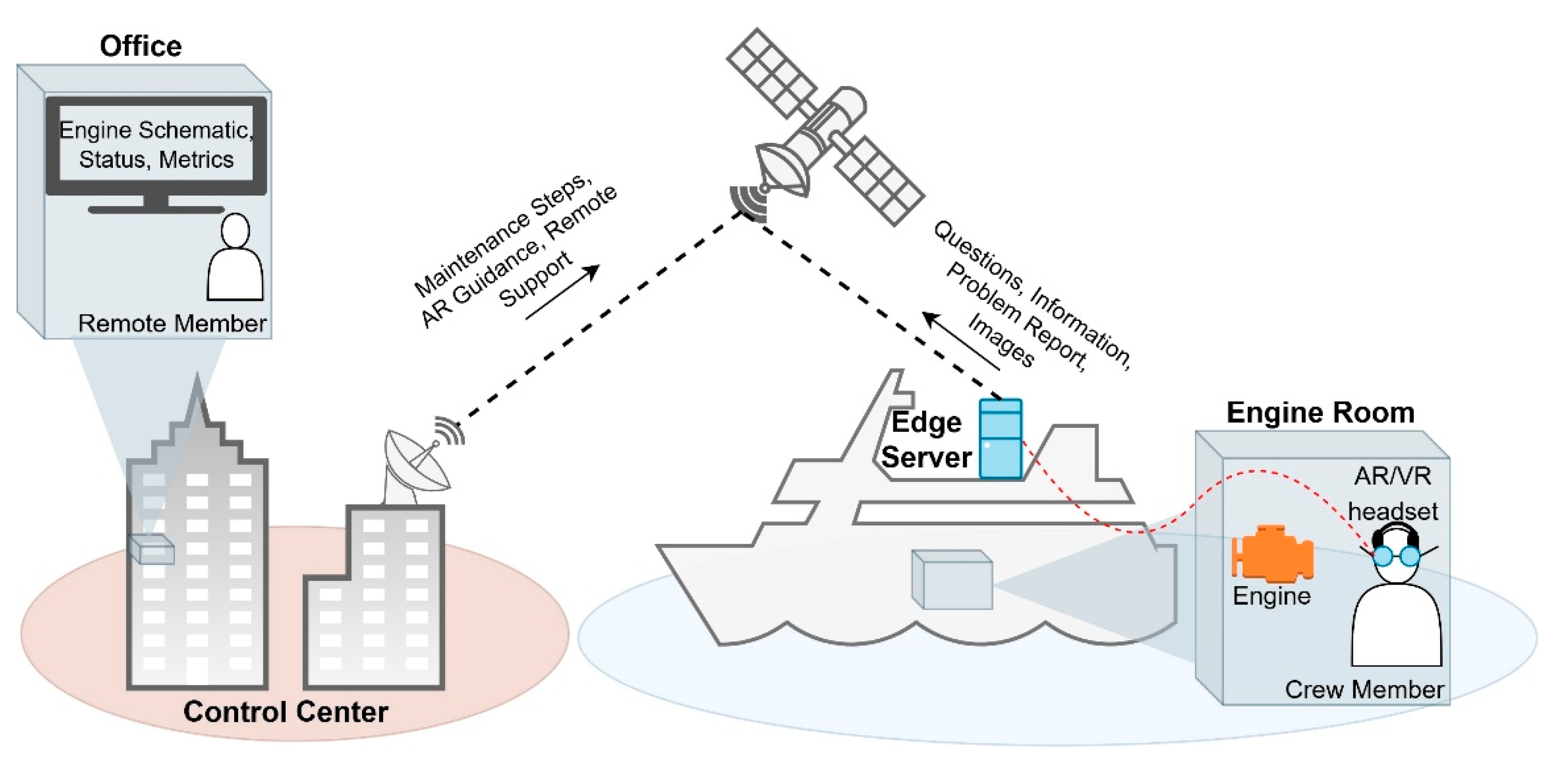
5.1. AR/VR-Based Fault Diagnosis and Maintenance Support Onboard
5.2. Emergency Signal Delivery and Latency-Critical Event Response
5.3. Intelligent Fleet Management and Route Optimization
5.4. Just-in-Time Port Arrivals and Smart Port Synchronization
5.5. Remote Maritime Surveillance and Border Security
6. Optimization Scenarios for 6G MCNs
6.1. Dynamic Spectrum Allocation in Heterogeneous Maritime Environments
- Graph Coloring and Greedy Heuristics: This approach models the network as a conflict graph, where nodes represent transmitters and edges represent potential interference (i.e., two nodes within a range that cannot use the same channel) [87]. The graph coloring problem assigns frequencies (colors) to nodes so that adjacent nodes (interfering nodes) receive different or orthogonal channels. One approach may be Greedy Coloring, which sorts nodes by degree (number of neighbors) and then assigns to every node the first available frequency that does not conflict [88]. Another option could be Weighted Heuristics, in which we use metrics such as required throughput or signal strength to prioritize channel assignment. Key advantages of both are (i) their fast, interpretable, and easy implementation and (ii) their suitability for near-real-time decisions in static or slowly varying maritime environments [87,88].
- RL-based Solution: In dynamic settings with mobility (UAVs, ships) and time-varying interference, RL enables nodes to learn optimal spectrum usage policies over time [85]. In this framework, each communication node (e.g., a ship or UAV) can be seen as an agent that observes a state and performs actions that lead to a predefined reward. The state vector may describe the local channel occupancy, recent interference levels, and QoS status of the node. The agent, upon reading the state, selects a frequency channel from the set . Then, the environment returns a reward to reflect whether the action was beneficial or not. This rewarding function can combine the achieved throughput (positive reward) and experienced interference or dropped packets (penalty). For large state-action dimensionality, the DRL method can be considered, where a neural network estimates the -values for each state-action pair [85]. During the training, the goal is to maximize the accumulated long-term reward. As a result, upon a series of training episodes, the agent converges to an optimal solution according to which the best frequency channel is selected for any given state [86].
6.2. Energy-Efficient Communication for UAVs and AUVs
- Convex Optimization with Dual Decomposition [92]: When the data rate function is convex and differentiable (as in log-based Shannon capacity models), the optimization problem is convex and can be solved using Lagrangian duality [93], dual decomposition, or Water-filling algorithm (in multi-channel cases) [94]. Lagrangian duality introduces Lagrange multipliers for the QoS constraints and is solved via the Karush–Kuhn–Tucker (KKT) conditions [93]. In dual decomposition methods, we separate the global problem into per-node subproblems and solve them in parallel. Finally, multi-channel Water-filling solutions can be used to allocate more power to better links while ensuring the total energy is minimized. These approaches can be easily implemented and compared with each other, and they are applicable in centralized MCNs (such as when a Sea BS controls a group of AUVs/UAVs).
- 2.
- DRL for Distributed Energy Optimization: When system dynamics are non-stationary or partially observable (e.g., unknown channel gains, time-varying loads, or node failures), DRL offers a powerful model-free solution [95]. Each UAV/AUV can be modeled as an agent that interacts with its environment. The state observed in each DRL episode can include local channel conditions, residual battery level, and past transmission outcomes, whereas the action taken by each agent is the selection of transmission power level (or sleep/awake state) [96]. The received reward for a given action can be the negative consumed energy, penalized if QoS is violated, as reflected in the following formula:
6.3. Task Offloading to Edge Nodes in MCNs
- Mixed Integer Linear Programming (MILP): The offloading problem can be formulated as a MILP when all latency and energy models are linearized [19,100]. MILP solvers (e.g., CPLEX, Gurobi [19]) can produce optimal solutions for small- to medium-scale networks. However, this approach is computationally intensive for large dynamic MCNs and not scalable when task arrival is continuous or unpredictable.
- Multi-Agent Reinforcement Learning (MARL): In a distributed MCN setting, task offloading can be modeled as a multi-agent RL problem, where each maritime node (ship, UAV, buoy) is an agent deciding whether to offload and to which edge server [98]. In the formulation of MARL, the agents’ state can include local task queue, channel quality, residual energy, and/or nearby edge availability. The agents may select an edge node for offloading or choose local execution (i.e., action). The reward collected at each step can be defined as in the optimization function in problem (8) (i.e., weighted delay-energy cost), possibly by further penalizing the agents for task drops [39].
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 4G | Fourth Generation |
| 5G | Fifth Generation |
| 5G NR | 5G New Radio |
| 6G | Sixth Generation |
| A2S | Air-to-Sea |
| AI | Artificial Intelligence |
| AR | Augmented Reality |
| AUV | Autonomous Underwater Vehicle |
| BS | Base Station |
| DRL | Deep Reinforcement Learning |
| eMBB | Enhanced Mobile Broadband |
| FL | Federated Learning |
| HAP | High-Altitude Platform |
| IRS | Intelligent Reflecting Surface |
| ISAC | Integrated Sensing and Communication |
| ISM | Industrial, Scientific, and Medical |
| LEO | Low Earth Orbit |
| LoS | Line of Sight |
| LTE | Long-Term Evolution (4G) |
| MANET | Maritime Ad Hoc Networks |
| MCN | Maritime Communication Network |
| MEC | Mobile Edge Computing |
| mIAB | Maritime Integrated Access and Backhaul |
| MIMO | Multiple-Input-Multiple-Output |
| mMTC | Massive Machine Type Communications |
| mmWave | Millimeter Wave |
| ML | Machine Learning |
| NLoS | Non-Line-of-Sight |
| ANN | Artificial Neural Network |
| NOMA | Non-Orthogonal Multiple Access |
| PPO | Proximal Policy Optimization |
| QoS | Quality of Service |
| RIS | Reconfigurable Intelligent Surfaces |
| RL | Reinforcement Learning |
| S2S | Ship-to-Ship |
| S2Sh | Ship-to-Shore |
| Sat-BS | Satellite Base Station |
| SemiSL | Semi-Supervised Learning |
| SL | Supervised Learning |
| UAV | Unmanned Aerial Vehicle |
| UHF | Ultra-High Frequency |
| UL | Unsupervised Learning |
| URLLC | Ultra Reliable Low Latency Communications |
| VHF | Very High Frequency |
| VR | Virtual Reality |
| XR | Extended Reality |
References
- Jacks, D.S.; Pendakur, K. Global trade and the maritime transport revolution. Rev. Econ. Stat. 2010, 92, 745–755. [Google Scholar] [CrossRef]
- Alqurashi, F.S.; Trichili, A.; Saeed, N.; Ooi, B.S.; Alouini, M.-S. Maritime communications: A survey on enabling technologies, opportunities, and challenges. IEEE Internet Things J. 2022, 10, 3525–3547. [Google Scholar] [CrossRef]
- Brooks, S.K.; Greenberg, N. Mental health and psychological wellbeing of maritime personnel: A systematic review. BMC Psychol. 2022, 10, 139. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Wu, J.; Lin, Q.; Luo, H.; Zhang, Q.; Qiu, K.; Chen, Z.; Gao, Y. Efficient Satellite-Ground Interconnection Design for Low-orbit Mega-Constellation Topology. IEEE Trans. Mob. Comput. 2024, 4, 2098–2109. [Google Scholar] [CrossRef]
- Nomikos, N.; Giannopoulos, A.; Kalafatelis, A.; Özduran, V.; Trakadas, P.; Karagiannidis, G.K. Improving connectivity in 6G maritime communication networks with UAV swarms. IEEE Access 2024, 12, 18739–18751. [Google Scholar] [CrossRef]
- Liu, S.; Zhu, L.; Huang, F.; Hassan, A.; Wang, D.; He, Y. A survey on air-to-sea integrated maritime internet of things: Enabling technologies, applications, and future challenges. J. Mar. Sci. Eng. 2023, 12, 11. [Google Scholar] [CrossRef]
- Xu, J.; Kishk, M.A.; Alouini, M.-S. Space-air-ground-sea integrated networks: Modeling and coverage analysis. IEEE Trans. Wirel. Commun. 2023, 22, 6298–6313. [Google Scholar] [CrossRef]
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The road towards 6G: A comprehensive survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, K.; Xing, W.; Li, H.; Yang, Z. Applications, evolutions, and challenges of drones in maritime transport. J. Mar. Sci. Eng. 2023, 11, 2056. [Google Scholar] [CrossRef]
- Guan, S.; Wang, J.; Jiang, C.; Duan, R.; Ren, Y.; Quek, T.Q.S. MagicNet: The maritime giant cellular network. IEEE Commun. Mag. 2021, 59, 117–123. [Google Scholar] [CrossRef]
- Nomikos, N.; Giannopoulos, A.; Trakadas, P.; Karagiannidis, G.K. Uplink NOMA for UAV-aided maritime Internet-of-Things. In Proceedings of the 2023 19th International Conference on the Design of Reliable Communication Networks (DRCN), Vilanova i la Geltrú, Spain, 21–23 March 2023; pp. 1–6. [Google Scholar]
- Amodu, O.A.; Nordin, R.; Jarray, C.; Bukar, U.A.; Raja Mahmood, R.A.; Othman, M. A survey on the design aspects and opportunities in age-aware UAV-aided data collection for sensor networks and Internet of Things applications. Drones 2023, 7, 260. [Google Scholar] [CrossRef]
- Wei, T.; Feng, W.; Chen, Y.; Wang, C.-X.; Ge, N.; Lu, J. Hybrid satellite-terrestrial communication networks for the maritime Internet of Things: Key technologies, opportunities, and challenges. IEEE Internet Things J. 2021, 8, 8910–8934. [Google Scholar] [CrossRef]
- Pan, Q.; Lin, S.; Lu, W.; Wang, Z.; Wu, L.; Zou, Y.; Ai, B.; Zhong, Z. Space-air-sea-ground integrated monitoring network-based maritime transportation emergency forecasting. IEEE Trans. Intell. Transp. Syst. 2021, 23, 2843–2852. [Google Scholar] [CrossRef]
- Xylouris, G.; Nomikos, N.; Kalafatelis, A.; Giannopoulos, A.; Spantideas, S.; Trakadas, P. Sailing into the future: Technologies, challenges, and opportunities for maritime communication networks in the 6G era. Front. Commun. Netw. 2024, 5, 1439529. [Google Scholar] [CrossRef]
- Giannopoulos, A.E.; Spantideas, S.T.; Zetas, M.; Nomikos, N.; Trakadas, P. FedShip: Federated Over-the-Air Learning for Communication-Efficient and Privacy-Aware Smart Shipping in 6G Communications. IEEE Trans. Intell. Transp. Syst. 2024, 25, 19873–19888. [Google Scholar] [CrossRef]
- Zetas, M.; Spantideas, S.; Giannopoulos, A.; Nomikos, N.; Trakadas, P. Empowering 6G maritime communications with distributed intelligence and over-the-air model sharing. Front. Commun. Netw. 2024, 4, 1280602. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, W.; Wang, J.; Quek, T.Q.S. Hybrid satellite-UAV-terrestrial networks for 6G ubiquitous coverage: A maritime communications perspective. IEEE J. Sel. Areas Commun. 2021, 39, 3475–3490. [Google Scholar] [CrossRef]
- Hassan, S.S.; Tun, Y.K.; Saad, W.; Han, Z.; Hong, C.S. Blue data computation maximization in 6G space-air-sea non-terrestrial networks. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar]
- Chen, W.; Li, C.; Yu, J.; Zhang, J.; Chang, F. A survey of maritime communications: From the wireless channel measurements and modeling perspective. Reg. Stud. Mar. Sci. 2021, 48, 102031. [Google Scholar] [CrossRef]
- Bhide, P.; Shetty, D.; Mikkili, S. Review on 6G communication and its architecture, technologies included, challenges, security challenges and requirements, applications, with respect to AI domain. IET Quantum Commun. 2024, 6, e12114. [Google Scholar] [CrossRef]
- Dao, N.-N.; Tu, N.H.; Thanh, T.T.; Bao, V.N.Q.; Na, W.; Cho, S. Neglected infrastructures for 6G—Underwater communications: How mature are they? J. Netw. Comput. Appl. 2023, 213, 103595. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y. Unlocking the ocean 6G: A review of path-planning techniques for maritime data harvesting assisted by autonomous marine vehicles. J. Mar. Sci. Eng. 2024, 12, 126. [Google Scholar] [CrossRef]
- Roy, A.; Chaporkar, P.; Karandikar, A. Optimal radio access technology selection algorithm for LTE-WiFi network. IEEE Trans. Veh. Technol. 2018, 67, 6446–6460. [Google Scholar] [CrossRef]
- Zhou, M.T.; Harada, H. Cognitive maritime wireless mesh/ad hoc networks. J. Netw. Comput. Appl. 2012, 35, 518–526. [Google Scholar] [CrossRef]
- Khan, M.A.; Alzahrani, B.A.; Barnawi, A.; Al-Barakati, A.; Irshad, A.; Chaudhry, S.A. A resource friendly authentication scheme for space–air–ground–sea integrated Maritime Communication Network. Ocean Eng. 2022, 250, 110894. [Google Scholar] [CrossRef]
- Adam, M.S.; Nordin, R.; Abdullah, N.F.; Abu-Samah, A.; Amodu, O.A.; Alsharif, M.H. Optimizing disaster response through efficient path planning of mobile aerial base station with genetic algorithm. Drones 2024, 8, 272. [Google Scholar] [CrossRef]
- Liu, H.; Qin, T.; Gao, Z.; Mao, T.; Ying, K.; Wan, Z.; Qiao, L.; Na, R.; Li, Z.; Hu, C.; et al. Near-space communications: The last piece of 6G space–air–ground–sea integrated network puzzle. Space Sci. Technol. 2024, 4, 0176. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Underwater optical wireless communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Domingo, M.C. Magnetic induction for underwater wireless communication networks. IEEE Trans. Antennas Propag. 2012, 60, 2929–2939. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, H.; Li, Y.; Sun, Q.; Wu, Y.; Jin, S.; Quek, T.Q.S.; Xu, C. Wireless channel models for maritime communications. IEEE Access 2018, 6, 68070–68088. [Google Scholar] [CrossRef]
- Done, A.; Căilean, A.-M.; Leșanu, C.-E.; Dimian, M.; Graur, A. Design and implementation of a satellite communication ground station. In Proceedings of the 2017 International Symposium on Signals, Circuits and Systems (ISSCS), Iași, Romania, 13–14 July 2017; pp. 1–4. [Google Scholar]
- Sun, C.; Wang, H.; Sun, D.; Zhu, C.; Zhou, J. Correlation statistics and parameter optimization algorithms for RIS-assisted marine wireless communication systems. Electronics 2024, 13, 3478. [Google Scholar] [CrossRef]
- Hao, X.; Ma, H.; Wang, W.; Zeng, F.; Cumanan, K.; Björnson, E. UAV-mounted RIS enabled maritime secure sensing with joint beamforming and trajectory design. IEEE Trans. Veh. Technol. 2025; early access. [Google Scholar] [CrossRef]
- Bartsiokas, I.A.; Avdikos, G.K.; Lyridis, D.V. Deep learning-based beam selection in RIS-aided maritime next-generation networks with application in autonomous vessel mooring. J. Mar. Sci. Eng. 2025, 13, 754. [Google Scholar] [CrossRef]
- Rauniyar, S.; Orten, P.; Petersen, S. Improving last-mile maritime communication using intelligent reflecting surfaces. In Proceedings of the 2024 34th International Telecommunication Networks and Applications Conference (ITNAC), Sydney, Australia, 27–29 November 2024; pp. 1–6. [Google Scholar]
- Xu, W.; Gu, L. UAV relay energy consumption minimization in an MEC-assisted marine data collection system. J. Mar. Sci. Eng. 2023, 11, 2333. [Google Scholar] [CrossRef]
- Giannopoulos, A.; Paralikas, I.; Spantideas, S.; Trakadas, P. HOODIE: Hybrid computation offloading via distributed deep reinforcement learning in delay-aware cloud-edge continuum. IEEE Open J. Commun. Soc. 2024, 5, 7818–7841. [Google Scholar] [CrossRef]
- Kalafatelis, A.S.; Nomikos, N.; Giannopoulos, A.; Alexandridis, G.; Karditsa, A.; Trakadas, P. Towards predictive maintenance in the maritime industry: A component-based overview. J. Mar. Sci. Eng. 2025, 13, 425. [Google Scholar] [CrossRef]
- Saafi, S.; Vikhrova, O.; Fodor, G.; Hosek, J.; Andreev, S. AI-aided integrated terrestrial and non-terrestrial 6G solutions for sustainable maritime networking. IEEE Netw. 2022, 36, 183–190. [Google Scholar] [CrossRef]
- Kalogiros, C.; Zois, G.; Darzanos, G.; Hallingby, H.K.; Lønsethagen, H.; Weiss, M.B.; Gavras, A. The potential of 5G experimentation-as-a-service paradigm for operators and vertical industries: The case of 5G-VINNI facility. In Proceedings of the 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 30 September–2 October 2019; pp. 347–352. [Google Scholar]
- Ojanen, P.; Yrjölä, S.; Matinmikko-Blue, M. Assessment of spectrum management approaches in offshore private industrial 5G networks. In Proceedings of the International Conference on Cognitive Radio Oriented Wireless Networks, Oulu, Finland, 26–28 October 2021; pp. 94–107. [Google Scholar]
- Massaro, M.; Kim, S. Why is South Korea at the forefront of 5G? Insights from technology systems theory. Telecommun. Policy 2022, 46, 102290. [Google Scholar] [CrossRef]
- Xia, T.; Wang, M.M.; Zhang, J.; Wang, L. Maritime Internet of Things: Challenges and solutions. IEEE Wirel. Commun. 2020, 27, 188–196. [Google Scholar] [CrossRef]
- Nguyen, V.-L.; Lin, P.-C.; Cheng, B.-C.; Hwang, R.-H.; Lin, Y.-D. Security and privacy for 6G: A survey on prospective technologies and challenges. IEEE Commun. Surv. Tutor. 2021, 23, 2384–2428. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, X.; Zhang, B.; Zhang, Y.; Niu, Z.; Kuang, N.; Chen, W.; Li, L.; Li, S. A survey on terahertz communications. China Commun. 2019, 16, 1–35. [Google Scholar] [CrossRef]
- Li, P.; Xing, Y.; Li, W. Distributed AI-native architecture for 6G networks. In Proceedings of the 2022 International Conference on Information Processing and Network Provisioning (ICIPNP), Guangzhou, China, 23–25 September 2022; pp. 57–62. [Google Scholar]
- Gong, S.; Lu, X.; Hoang, D.T.; Niyato, D.; Shu, L.; Kim, D.I.; Liang, Y.-C. Toward smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tutor. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Zhang, L.; Du, Q.; Lu, L.; Zhang, S. Overview of the integration of communications, sensing, computing, and storage as enabling technologies for the metaverse over 6G networks. Electronics 2023, 12, 3651. [Google Scholar] [CrossRef]
- Msadaa, I.C.; Zairi, S.; Dhraief, A. Non-terrestrial networks in a nutshell. IEEE Internet Things Mag. 2022, 5, 168–174. [Google Scholar] [CrossRef]
- Wong, W.K.; Dong, N.; Dinh, C.M. PQS-BC: Comparative analysis of NIST post-quantum signatures for blockchain. In Proceedings of the International Conference on Network and System Security, Guangzhou, China, 19–21 December 2024; pp. 349–369. [Google Scholar]
- Khan, L.U.; Saad, W.; Niyato, D.; Han, Z.; Hong, C.S. Digital-twin-enabled 6G: Vision, architectural trends, and future directions. IEEE Commun. Mag. 2022, 60, 74–80. [Google Scholar] [CrossRef]
- Lindenbergs, A.; Muehleisen, M.; Payaró, M.; Kõrbe Kaare, K.; Zaglauer, H.W.; Scholliers, J.; Sadam, A.; Kuhi, K.; Nykanen, L. Seamless 5G multi-hop connectivity architecture and trials for maritime applications. Sensors 2023, 23, 4203. [Google Scholar] [CrossRef]
- Dogra, A.; Jha, R.K.; Jain, S. A survey on beyond 5G network with the advent of 6G: Architecture and emerging technologies. IEEE Access 2020, 9, 67512–67547. [Google Scholar] [CrossRef]
- Gómez Ruiz, M.Á.; de Almeida, I.M.; Pérez Fernández, R. Application of machine learning techniques to the maritime industry. J. Mar. Sci. Eng. 2023, 11, 1820. [Google Scholar] [CrossRef]
- Giannopoulos, A.; Gkonis, P.; Bithas, P.; Nomikos, N.; Kalafatelis, A.; Trakadas, P. Federated learning for maritime environments: Use cases, experimental results, and open issues. J. Mar. Sci. Eng. 2024, 12, 1034. [Google Scholar] [CrossRef]
- Snapir, B.; Waine, T.W.; Biermann, L. Maritime vessel classification to monitor fisheries with SAR: Demonstration in the North Sea. Remote Sens. 2019, 11, 353. [Google Scholar] [CrossRef]
- Yang, S.; Liu, Y.; Cui, L.; Zhu, R. MAEON: An efficient weather-aware ocean network routing scheme based on multi-agent reinforcement learning. In Proceedings of the 2024 IEEE/ACM 32nd International Symposium on Quality of Service (IWQoS), Tokyo, Japan, 10–12 June 2024; pp. 1–10. [Google Scholar]
- Ribeiro, C.V.; Paes, A.; de Oliveira, D. AIS-based maritime anomaly traffic detection: A review. Expert Syst. Appl. 2023, 231, 120561. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Hu, Y.; Wang, Y.; Sun, J.; Dong, X. A hybrid-clustering model of ship trajectories for maritime traffic patterns analysis in port area. J. Mar. Sci. Eng. 2022, 10, 342. [Google Scholar] [CrossRef]
- Jurdana, I.; Lopac, N.; Wakabayashi, N.; Liu, H. Shipboard data compression method for sustainable real-time maritime communication in remote voyage monitoring of autonomous ships. Sustainability 2021, 13, 8264. [Google Scholar] [CrossRef]
- Sedunov, A.; Francis, C.; Salloum, H.; Sutin, A.; Sedunov, N. Low-size and cost acoustic buoy for autonomous vessel detection. In Proceedings of the 2022 IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 8–9 November 2022; pp. 1–6. [Google Scholar]
- Yan, K.; Zhong, C.; Ji, Z.; Huang, J. Semi-supervised learning for early detection and diagnosis of various air handling unit faults. Energy Build. 2018, 181, 75–83. [Google Scholar] [CrossRef]
- Rao, Z.; Xu, Y.; Yao, Y.; Meng, W. DAR-DRL: A dynamic adaptive routing method based on deep reinforcement learning. Comput. Commun. 2024, 228, 107983. [Google Scholar] [CrossRef]
- Ren, J.; Chai, Z.; Chen, Z. Joint spectrum allocation and power control in vehicular communications based on dueling double DQN. Veh. Commun. 2022, 38, 100543. [Google Scholar] [CrossRef]
- Wu, Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission. Ocean Eng. 2019, 182, 162–173. [Google Scholar] [CrossRef]
- Zheng, B.; Ming, L.; Hu, Q.; Lü, Z.; Liu, G.; Zhou, X. Supply-demand-aware deep reinforcement learning for dynamic fleet management. ACM Trans. Intell. Syst. Technol. 2022, 13, 37. [Google Scholar] [CrossRef]
- Giannopoulos, A.; Nomikos, N.; Ntroulias, G.; Syriopoulos, T.; Trakadas, P. Maritime federated learning for decentralized on-ship intelligence. In Proceedings of the IFIP International Conference on Artificial Intelligence Applications and Innovations, Leon, Spain, 15–17 June 2023; pp. 195–206. [Google Scholar]
- Lind, M.; Ward, R.; Bergmann, M.; Haraldson, S.; Zerem, A.; Hoffmann, J.; Eklund, E. Maritime informatics for increased collaboration. In Maritime Informatics; Springer International Publishing: Cham, Switzerland, 2020; pp. 113–136. [Google Scholar]
- Mostafizi, A.; Koll, C.; Wang, H. A decentralized and coordinated routing algorithm for connected and autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11505–11517. [Google Scholar] [CrossRef]
- Arjona Aroca, J.; Giménez Maldonado, J.A.; Ferrús Clari, G.; Alonso i García, N.; Calabria, L.; Lara, J. Enabling a green just-in-time navigation through stakeholder collaboration. Eur. Transp. Res. Rev. 2020, 12, 22. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Bengio, Y. Generative adversarial networks. Commun. ACM 2020, 63, 139–144. [Google Scholar] [CrossRef]
- Abbasi, S.; Hajabdollahi, M.; Karimi, N.; Samavi, S. Modeling teacher-student techniques in deep neural networks for knowledge distillation. In Proceedings of the 2020 International Conference on Machine Vision and Image Processing (MVIP), Qom, Iran, 19–20 February 2020; pp. 1–6. [Google Scholar]
- Jiang, Y.; Wang, S.; Valls, V.; Ko, B.J.; Lee, W.H.; Leung, K.K.; Tassiulas, L. Model pruning enables efficient federated learning on edge devices. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 10374–10386. [Google Scholar] [CrossRef] [PubMed]
- Rokh, B.; Azarpeyvand, A.; Khanteymoori, A. A comprehensive survey on model quantization for deep neural networks in image classification. ACM Trans. Intell. Syst. Technol. 2023, 14, 1–50. [Google Scholar] [CrossRef]
- Yazdi, M. Augmented reality (AR) and virtual reality (VR) in maintenance training. In Advances in Computational Mathematics for Industrial System Reliability and Maintainability; Springer Nature Switzerland: Cham, Switzerland, 2024; pp. 169–183. [Google Scholar]
- Kharlamov, M.; Al-Sveiti, M.; Karpychev, M.; Volkov, A.; Muthanna, A. AR/VR service migration algorithm based distributed edge computing system for telesurgery. In Proceedings of the 7th International Conference on Future Networks and Distributed Systems, Cambridge, UK, 21–22 December 2023; pp. 647–656. [Google Scholar]
- Chandran, I.; Vipin, K. Multi-UAV networks for disaster monitoring: Challenges and opportunities from a network perspective. Drone Syst. Appl. 2024, 12, 1–28. [Google Scholar]
- Hazrathosseini, A.; Afrapoli, A.M. Intelligent fleet management systems in surface mining: Status, threats, and opportunities. Min. Metall. Explor. 2023, 40, 2087–2106. [Google Scholar] [CrossRef]
- Senss, A.; Canbulat, O.; Uzun, D.; Gunbeyaz, S.A.; Turan, O. Just in time vessel arrival system for dry bulk carriers. J. Shipp. Trade 2023, 8, 12. [Google Scholar] [CrossRef]
- Fan, Y.Y.; Kalaba, R.E.; Moore, J.E. Arriving on time. J. Optim. Theory Appl. 2005, 127, 497–513. [Google Scholar] [CrossRef]
- Melillos, G.; Themistocleous, K.; Danezis, C.; Michaelides, S.; Hadjimitsis, D.G.; Jacobsen, S.; Tings, B. The use of remote sensing for maritime surveillance for security and safety in Cyprus. In Proceedings of the Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXV, Online, 21–24 April 2020; Volume 11418, pp. 141–152. [Google Scholar]
- Fu, S.; Zhao, L.; Su, Z.; Jian, X. UAV based relay for wireless sensor networks in 5G systems. Sensors 2018, 18, 2413. [Google Scholar] [CrossRef]
- Albinsaid, H.; Singh, K.; Biswas, S.; Li, C.P. Multi-agent reinforcement learning-based distributed dynamic spectrum access. IEEE Trans. Cogn. Commun. Netw. 2021, 8, 1174–1185. [Google Scholar] [CrossRef]
- Naparstek, O.; Cohen, K. Deep multi-user reinforcement learning for distributed dynamic spectrum access. IEEE Trans. Wirel. Commun. 2018, 18, 310–323. [Google Scholar] [CrossRef]
- Zhao, Q.; Sadler, B.M. A survey of dynamic spectrum access. IEEE Signal Process. Mag. 2007, 24, 79–89. [Google Scholar] [CrossRef]
- Barba, L.; Cardinal, J.; Korman, M.; Langerman, S.; Van Renssen, A.; Roeloffzen, M.; Verdonschot, S. Dynamic graph coloring. Algorithmica 2019, 81, 1319–1341. [Google Scholar] [CrossRef]
- Jin, H.; Jin, X.; Zhou, Y.; Guo, P.; Ren, J.; Yao, J.; Zhang, S. A survey of energy efficient methods for UAV communication. Veh. Commun. 2023, 41, 100594. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, S. Multilink and AUV-assisted energy-efficient underwater emergency communications. IEEE Internet Things J. 2022, 10, 8068–8082. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H.; Jembre, Y.Z.; Kim, D. An energy-efficient data collection protocol with AUV path planning in the Internet of Underwater Things. J. Netw. Comput. Appl. 2019, 135, 20–31. [Google Scholar] [CrossRef]
- Simonetto, A.; Jamali-Rad, H. Primal recovery from consensus-based dual decomposition for distributed convex optimization. J. Optim. Theory Appl. 2016, 168, 172–197. [Google Scholar] [CrossRef]
- Wang, H.; Agoulmine, N.; Ma, M.; Li, Y.; Wang, X. Network lifetime optimization by KKT optimality conditions in wireless sensor networks. Wirel. Pers. Commun. 2009, 49, 179–196. [Google Scholar] [CrossRef]
- He, P.; Zhao, L.; Zhou, S.; Niu, Z. Water-filling: A geometric approach and its application to solve generalized radio resource allocation problems. IEEE Trans. Wirel. Commun. 2013, 12, 3637–3647. [Google Scholar] [CrossRef]
- Liu, C.H.; Ma, X.; Gao, X.; Tang, J. Distributed energy-efficient multi-UAV navigation for long-term communication coverage by deep reinforcement learning. IEEE Trans. Mob. Comput. 2019, 19, 1274–1285. [Google Scholar] [CrossRef]
- Zhan, C.; Zeng, Y. Energy minimization for cellular-connected UAV: From optimization to deep reinforcement learning. IEEE Trans. Wirel. Commun. 2022, 21, 5541–5555. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Z.; Han, S.; Lü, S. Proximal policy optimization via enhanced exploration efficiency. Inf. Sci. 2022, 609, 750–765. [Google Scholar] [CrossRef]
- Wei, Z.; He, R.; Li, Y.; Song, C. DRL-based computation offloading and resource allocation in green MEC-enabled maritime-IoT networks. Electronics 2023, 12, 4967. [Google Scholar] [CrossRef]
- Xu, Y.; Yu, Q. Deep reinforcement learning based computation offloading and resource allocation strategy for maritime Internet of Things. Comput. Netw. 2025, 264, 111221. [Google Scholar] [CrossRef]
- Guo, P.; Shi, H.; Wang, Y.; Xiong, J. Multi-objective scheduling of cloud-edge cooperation in distributed manufacturing via multi-agent deep reinforcement learning. Int. J. Prod. Res. 2024, 1–25. [Google Scholar] [CrossRef]
- Rosalie, M.; Brust, M.R.; Danoy, G.; Chaumette, S.; Bouvry, P. Coverage optimization with connectivity preservation for UAV swarms applying chaotic dynamics. In Proceedings of the 2017 IEEE International Conference on Autonomic Computing (ICAC), Columbus, OH, USA, 17–21 July 2017; pp. 113–118. [Google Scholar]
- Ibrahim, L.; Mahmud, M.N.; Salleh, M.F.M.; Al-Rimawi, A. Joint beamforming optimization design and performance evaluation of RIS-aided wireless networks: A comprehensive state-of-the-art review. IEEE Access 2023, 11, 141801–141859. [Google Scholar] [CrossRef]
- Ding, R.; Chen, J.; Wu, W.; Liu, J.; Gao, F.; Shen, X. Packet routing in dynamic multi-hop UAV relay network: A multi-agent learning approach. IEEE Trans. Veh. Technol. 2022, 71, 10059–10072. [Google Scholar] [CrossRef]


| Study | Summary |
|---|---|
| [15] | Reviews enabling technologies, use cases, and challenges for 6G-enabled MCNs, including smart ports and integrated network architectures. |
| [16,17] | Proposes a federated learning and over-the-air computation framework for privacy-aware, efficient 6G maritime communications. |
| [6] | Presents a comprehensive survey of air-to-sea integrated maritime IoT technologies, applications, and research gaps. |
| [18] | Explores UAV and satellite-supported base stations for maritime 6G coverage, focusing on link scheduling and rate adaptation. |
| [19] | Proposes resource allocation and task offloading solutions for reliable 6G space-air-sea maritime networks. |
| [20] | Surveys maritime wireless channel characteristics and network architecture differences from terrestrial systems. |
| [21] | Overviews 6G communication technologies, architectures, and applications, including implications for maritime connectivity. |
| [22] | Highlights underwater communications as a vital but overlooked infrastructure for achieving full 6G network access. |
| [5,11] | Examines UAV swarms with NOMA to enhance 6G maritime wireless connectivity and spectral efficiency. |
| [23] | Reviews path-planning for autonomous maritime vehicles to support data collection and NTNs in future oceanic 6G systems. |
| Layer | Entity | Role |
|---|---|---|
| Space | Satellites | LEO satellites provide global coverage and serve as the backbone for long-range backhaul communication. They offer connectivity to ships, UAVs, and coastal infrastructure, particularly in deep-sea areas with no terrestrial coverage. |
| Air | HAPs, UAVs | HAPs and UAVs operate in the aerial tier to support dynamic relays, coverage extension, and computation offloading. IRS-aided UAVs further enhance signal propagation using reconfigurable surfaces. |
| Sea Surface | Sea BS, Ships, Buoys | This layer includes passenger ships, cargo vessels, small boats, floating buoys, and Sea BS. These nodes engage in short-range S2S, S2Sh, and ship-to-aerial communication, forming the core of near-surface maritime networking. |
| Underwater | AUVs | AUVs and underwater sensors rely on acoustic or optical links to connect to sea surface nodes. These systems handle environmental monitoring, subsea inspection, and coordinated missions. |
| Ground | Ground Infrastructure | Terrestrial base stations and satellite gateways connected to business/control centers act as the anchor points for centralized control, data aggregation, and global coordination of the MCN. |
| Domain | Enabling Technology | Benefit to MCNs |
|---|---|---|
| Communication | RIS Communications | Enhances NLoS links via UAVs or buoys, useful in harsh sea propagation conditions. |
| NOMA Communications | Increases spectral efficiency for dense S2S/S2Sh sensor deployments. | |
| THz Communications | Enables ultra-high speed short-range links (e.g., UAV-to-ship). | |
| Full-Duplex (FD) | Improves bandwidth efficiency in ship relays and sea BS. | |
| Massive MIMO | Enhances directional communication with beamforming from shore to moving vessels. | |
| Computation and Edge Intelligence | MEC | Real-time processing on ships, UAVs, sea BS to reduce latency and satellite load. |
| Task Offloading | Offload compute-heavy tasks (e.g., analytics) from vessels to aerial/satellite nodes. | |
| Digital Twins | Create predictive models for ship operations and sea conditions using real-time data. | |
| Federated Learning (FL) | Enables decentralized AI among ships and nodes without sharing raw data. | |
| AI-Driven Networking | Reinforcement Learning (RL) | Optimal routing, power control, and scheduling in dynamic maritime topology. |
| AI-based Resource Allocation | Bandwidth and spectrum optimization across links and platforms. | |
| AI-based Spectrum Sensing | Detects interference, adapts to regulatory constraints in shared bands. | |
| AI-based Energy Management | Extends UAV and AUV operation through adaptive control strategies. |
| Limitation in MCNs | 6G-Enabling Technology/Approach | Expected Benefit |
|---|---|---|
| Limited coverage in deep sea or polar regions | LEO mega-constellations, RIS, UAVs-as-relays | Seamless coverage, dynamic link establishment |
| Complex over-sea propagation | RIS, AI-driven channel modeling | Adaptive link enhancement and environment-aware communication |
| Interference in densified coastal areas | NOMA, Smart Spectrum Management, AI-based resource allocation | Enhanced spectral efficiency, coexistence of multiple networks |
| High mobility and topology dynamics | DRL, Mobility-Aware Routing | Real-time decision-making and adaptive network topology control |
| Inefficient handover and session continuity | AI-assisted beamforming, predictive mobility models | Smoother transitions between network elements (e.g., UAV-to-satellite) |
| Diverse QoS requirements | Network Slicing, Semantic Communications, Multi-objective Scheduling | Service-differentiated resource management for mission-critical tasks |
| Security and trust in distributed platforms | Federated Learning, Blockchain, Zero-Trust Architectures | Secure and privacy-preserving AI at the network edge |
| Regulatory spectrum fragmentation | AI-assisted spectrum sharing, Cognitive Radio, mIAB | Dynamic access to heterogeneous bands across jurisdictions |
| Latency and bandwidth fluctuations | MEC, Digital Twins | Localized processing and predictive optimization of workloads |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giannopoulos, A.; Gkonis, P.; Kalafatelis, A.; Nomikos, N.; Spantideas, S.; Trakadas, P.; Syriopoulos, T. From 6G to SeaX-G: Integrated 6G TN/NTN for AI-Assisted Maritime Communications—Architecture, Enablers, and Optimization Problems. J. Mar. Sci. Eng. 2025, 13, 1103. https://doi.org/10.3390/jmse13061103
Giannopoulos A, Gkonis P, Kalafatelis A, Nomikos N, Spantideas S, Trakadas P, Syriopoulos T. From 6G to SeaX-G: Integrated 6G TN/NTN for AI-Assisted Maritime Communications—Architecture, Enablers, and Optimization Problems. Journal of Marine Science and Engineering. 2025; 13(6):1103. https://doi.org/10.3390/jmse13061103
Chicago/Turabian StyleGiannopoulos, Anastasios, Panagiotis Gkonis, Alexandros Kalafatelis, Nikolaos Nomikos, Sotirios Spantideas, Panagiotis Trakadas, and Theodoros Syriopoulos. 2025. "From 6G to SeaX-G: Integrated 6G TN/NTN for AI-Assisted Maritime Communications—Architecture, Enablers, and Optimization Problems" Journal of Marine Science and Engineering 13, no. 6: 1103. https://doi.org/10.3390/jmse13061103
APA StyleGiannopoulos, A., Gkonis, P., Kalafatelis, A., Nomikos, N., Spantideas, S., Trakadas, P., & Syriopoulos, T. (2025). From 6G to SeaX-G: Integrated 6G TN/NTN for AI-Assisted Maritime Communications—Architecture, Enablers, and Optimization Problems. Journal of Marine Science and Engineering, 13(6), 1103. https://doi.org/10.3390/jmse13061103