
Empirical Geomorphic Approach to Complement Morphodynamic Modeling on Embayed Beaches


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- Downdrift of a shore-normal groin with moderate protrusion into the sea under oblique swell;
- (2)
- Downdrift or between a complex groin receiving normal incident waves;
- (3)
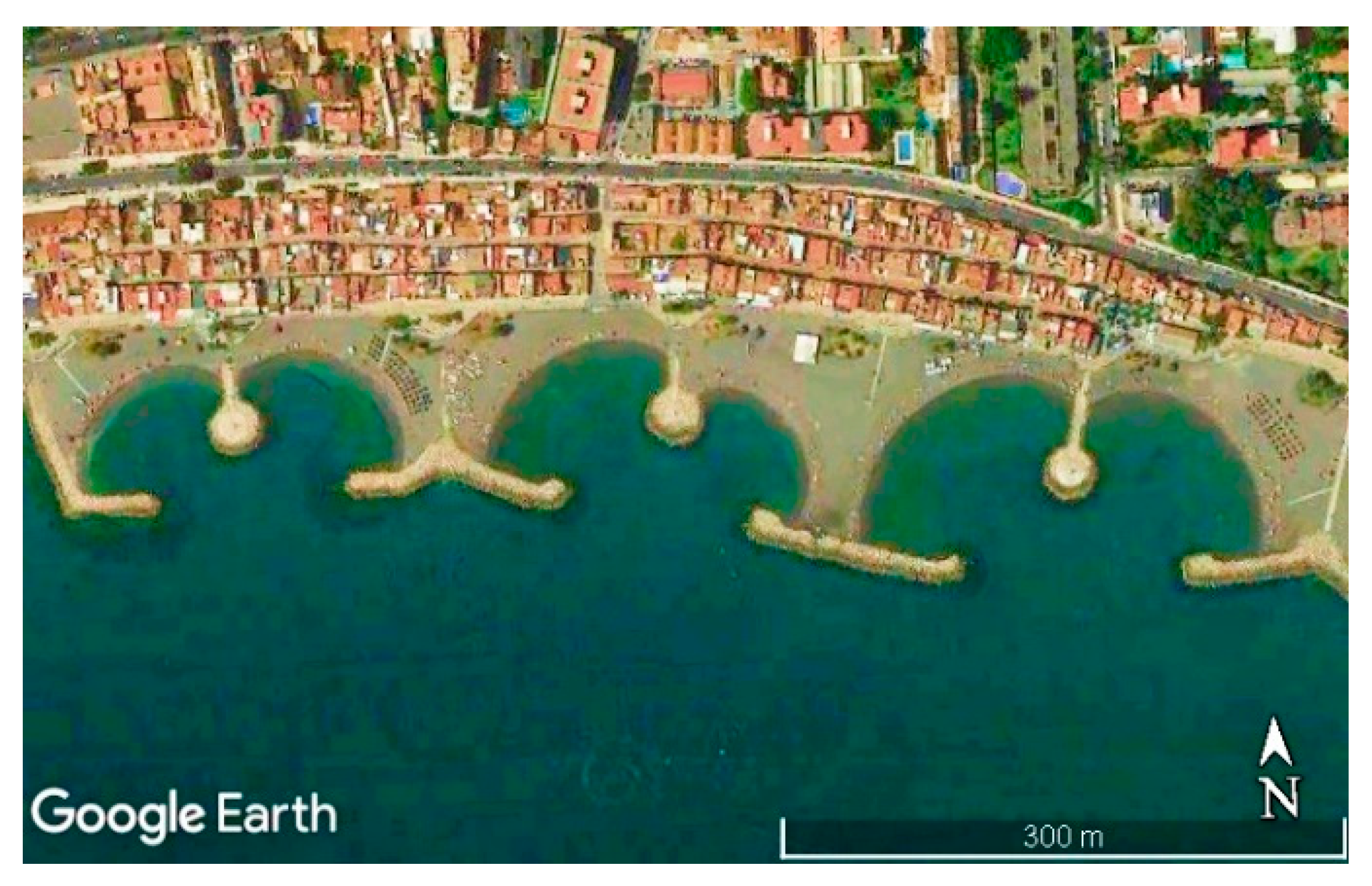
- Between detached breakwaters; and
- (4)
- Downdrift of the out breakwater for a harbor, port, or marina (for yacht).
2. Methods and Tools
2.1. Parabolic Model
- (1)
- Being derived from a mixed set of model and prototype bays believed to be in static equilibrium;
- (2)
- setting the origin of the coordinate system at the wave diffraction point (i.e., the tip of a headland);
- (3)
- recognizing the orthogonality between the predominant wave direction to the tangent at the downdrift control point; and
- (4)
- classifying beach stability based on the existing planform in relation to an ideal static equilibrium planform defined by the parabolic model.
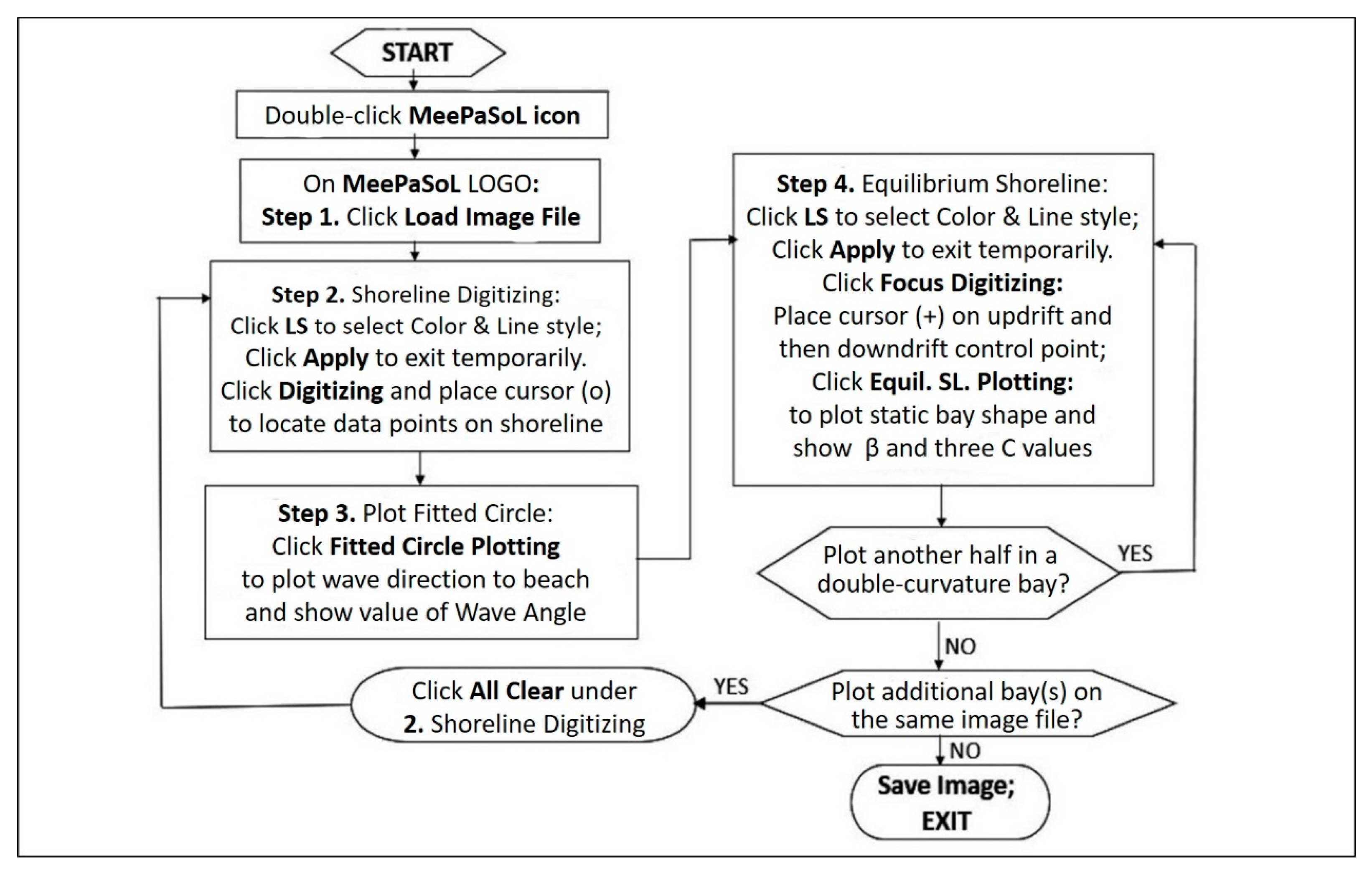
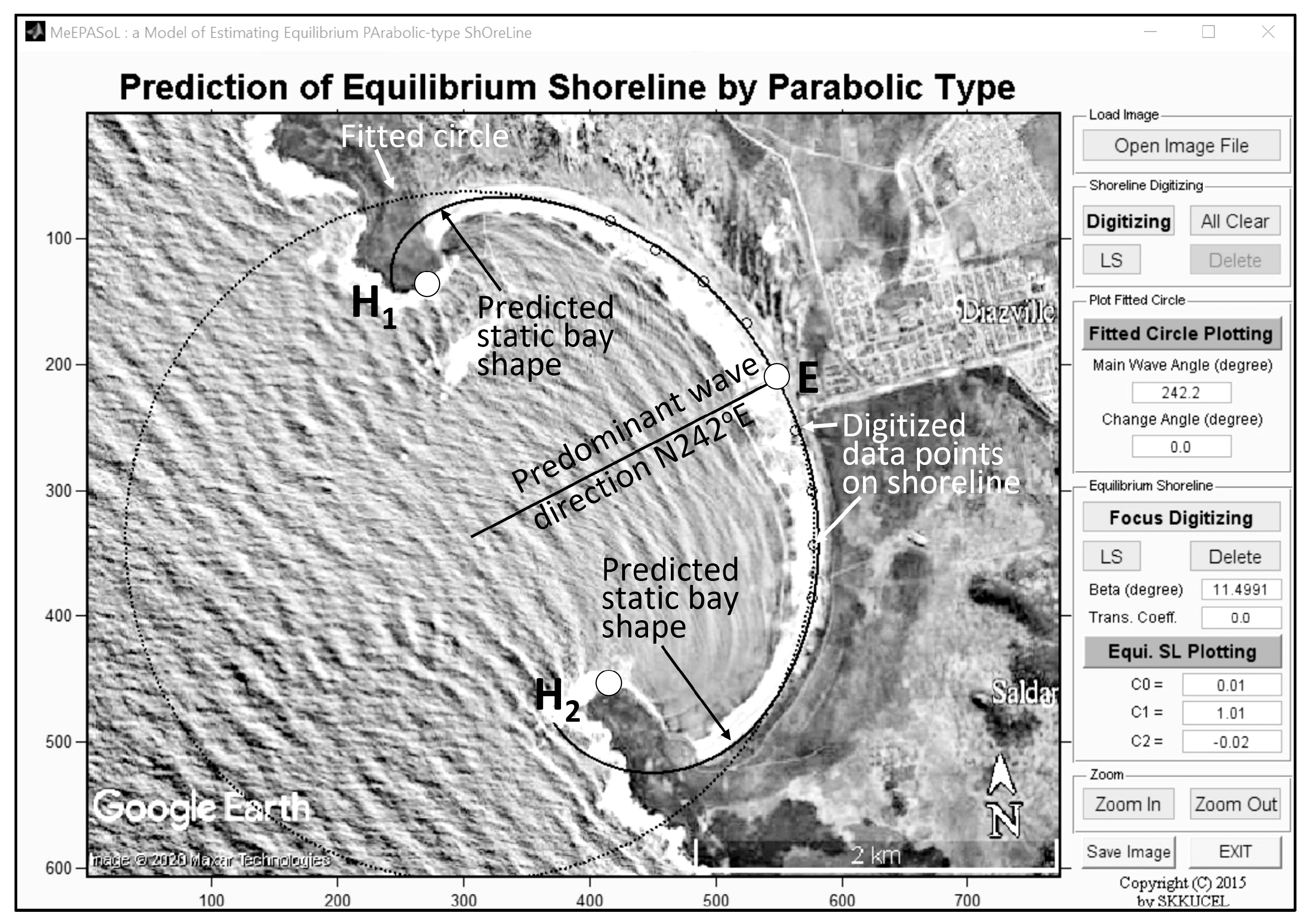
2.2. Software MEPBAY and MeePaSoL
3. Results and Examples
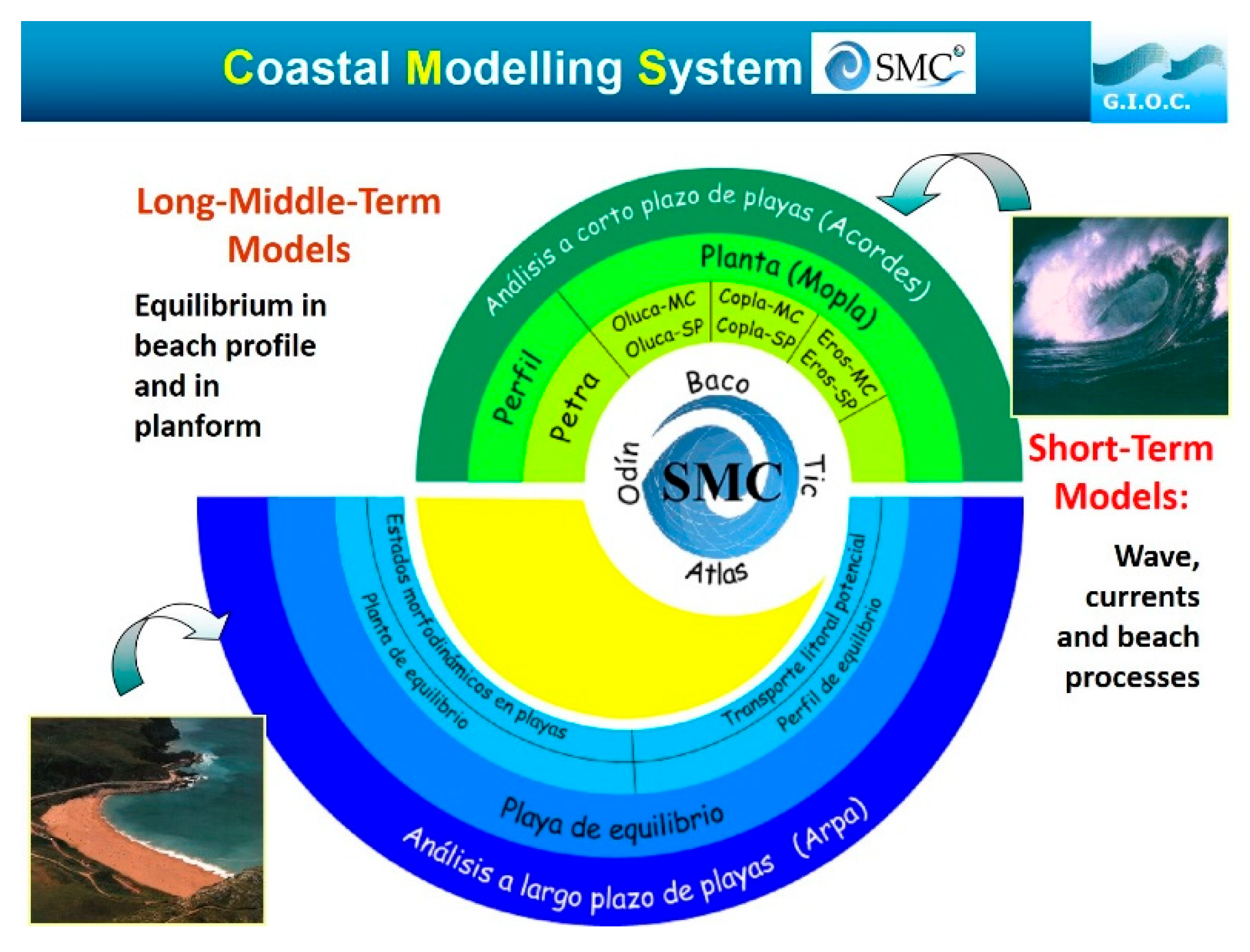
3.1. Parabolic Model as an Integral Component in SMC
- (1)
- Pre-processing includes Baco (bathymetric data), Atlas (flood-level data), and Odin (wave and dynamic characteristics and model, and morphodynamic states);
- (2)
- Short-term analysis includes Mopla (beach morphodynamic evolution) and Petra (beach cross-shore profile evolution); and
- (3)
3.2. Parabolic Model to Complement XBeach’s Output of Shoreline Planform
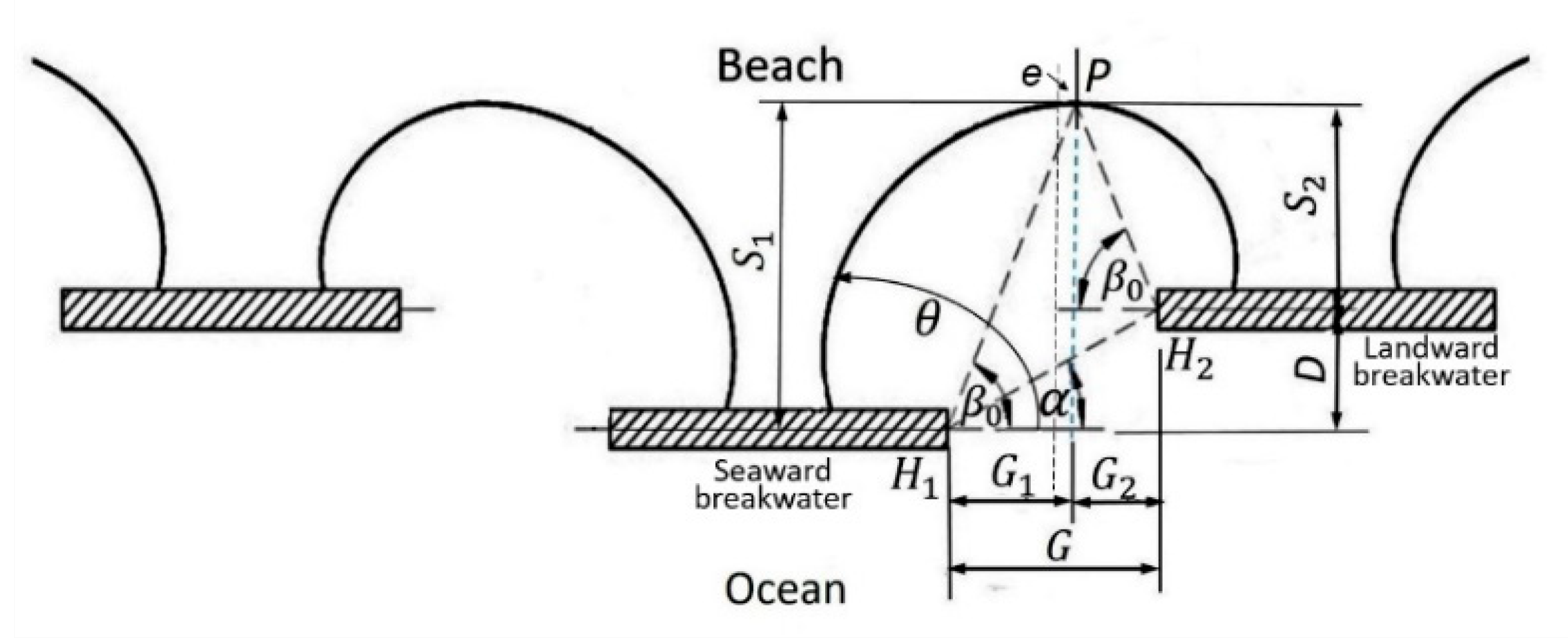
3.3. Bay Beaches with Symmetrical Double Curvature
3.4. Bay Beaches with Asymmetrical Double Curvature
3.5. Beach Evolution and Protection Downdrift of Harbor Extension
4. Discussion
4.1. Advantages of Empirical Geomorphic Model
4.2. Issues Associated with Application of a Morphodynamic Modeling Study
- (1)
- Timing of application and accuracy of results
- (2)
- Applicable coastal landform types
- (3)
- Effects of water levels
- (4)
- Material for headlands
- (5)
- Complexity of coastal landform
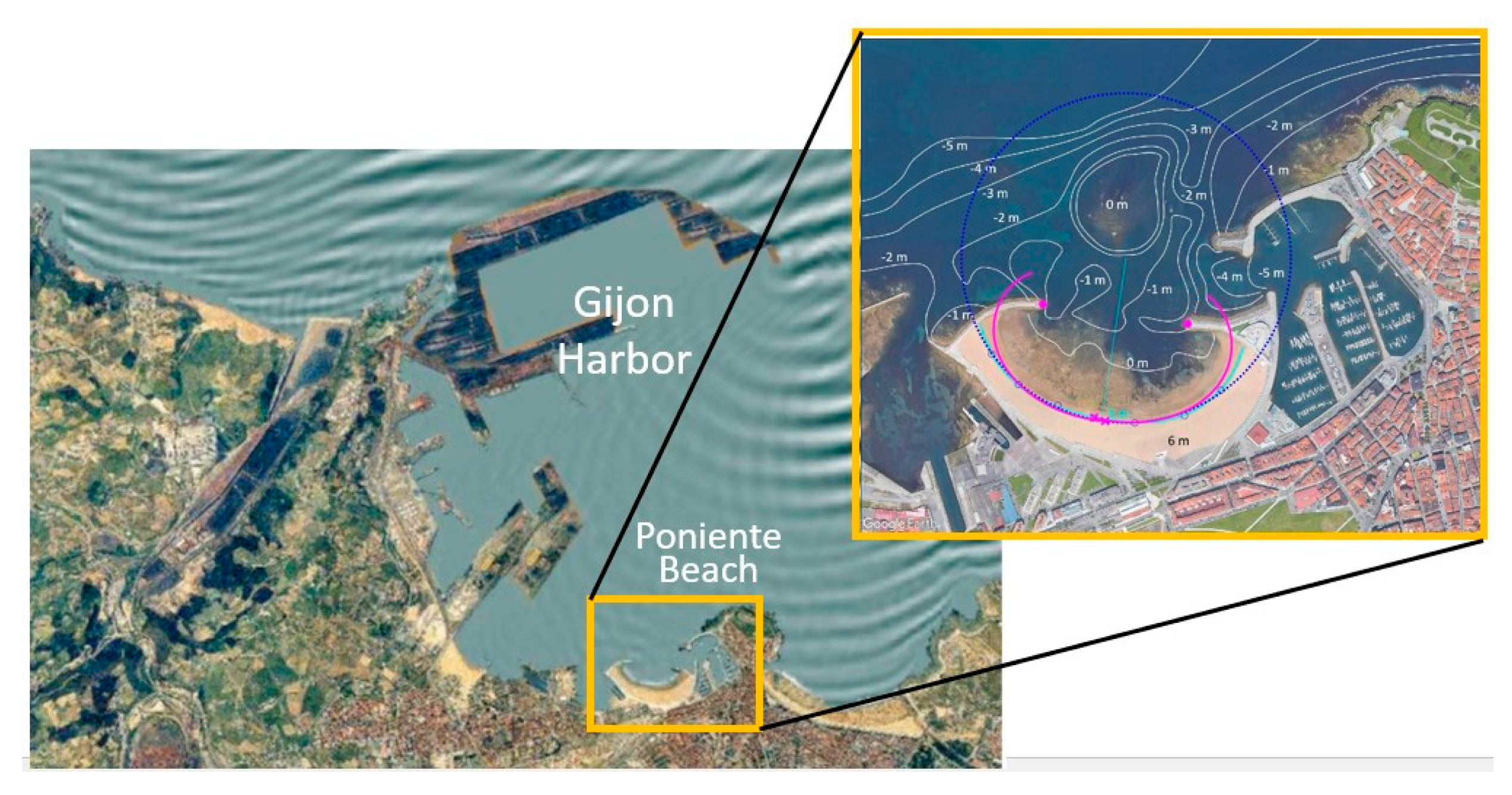
4.3. Case Study
5. Concluding Remarks
Software Availability for MeePaSoL
- -
- Developer: Laboratory of Coastal Environment, Sungkyunkwan University (SKKU), Republic of Korea. Group leader: Professor Jung L. Lee.
- -
- Program language: The code is written in MATLAB.
- -
- Access to source code: https://github.com/BSMC-20180404/MeePaSoL.git (accessed on 06 May 2022).
- -
- The MATLAB codes in MeePaSoL.zip (download from the link) can be run as a compiled standalone execution document without installing the bulk of the MATLAB system, after downloading and installing “matlab runtime” MCR version 2021a (9.10) for Windows (64-bit), from MathWorks’ homepage, https://www.mathworks.com, onto a computer.
- -
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vitousek, S.; Barnard, P.; Limber, P.; Erikson, L.; Cole, B. A model integrating longshore and cross-shore processes for predicting long-term shoreline response to climate change. J. Geophys. Res. Earth Surf. 2017, 122, 782–806. [Google Scholar] [CrossRef]
- Kamphuis, J.W. Introduction to Coastal Engineering and Management; Advanced Series on Ocean Engineering; World Scientific: Singapore, 2010; Volume 30, 525p. [Google Scholar]
- Warren, I.R.; Bach, H. Mike 21: A modelling system for estuaries, coastal waters and seas. Environ. Softw. 1992, 7, 229–240. [Google Scholar] [CrossRef]
- Roelvink, J.A.; Van Banning, G.K.F.M. Design and development of DELFT3D and application to coastal morphodynamics. Oceano. Lit. Rev. 1995, 11, 925. [Google Scholar]
- Hanson, H. GENESIS—A Generalized Shoreline Change Numerical Method. J. Coast. Res. 1989, 5, 1–27. [Google Scholar]
- Hanson, H.; Kraus, N.C. Genesis: Generalized Model for Simulating Shoreline Change; Coastal Engineering Research Center: Vicksburg, MS, USA; U.S. Army Corps of Engineers: Washington, DC, USA, 1989; CERC-MP-89-19. [Google Scholar]
- Larson, M.; Kraus, N.C. SBEACH: Numerical Model for Simulating Storm-Induced Beach Change, Report 1, Empirical Foundation and Model Development; Coastal Engineering Research Center: Newark, NJ, USA; U.S. Army Corps of Engineers: Washington, DC, USA, 1989; Report CERC-89-9. [Google Scholar]
- Larson, M.; Kraus, N.C.; Byrnes, M.R. SBEACH: Numerical Model for Stimulating Storm-Induced Beach Change; Coastal Engineering Research Center: Newark, NJ, USA; U.S. Army Corps of Engineers: Washington, DC, USA, 1989; Report CERC-89-9. [Google Scholar]
- Roelvink, D.; Reniers, A.; van Dongeren, A.; van Thiel de Vries, J.; Lescinski, J.; McCall, R. XBeach Model Description and Manual; UNESCO-IHE Institute for Water Education, Deltares and Delft University of Technology: Delft, The Netherlands, 2010; Report 21 June 2010. [Google Scholar]
- Warner, J.C.; Armstrong, B.; He, R.; Zambon, J.B. Development of a coupled ocean-temperature-wave-sediment transport (COAWST) modelling system. Ocean Model. 2010, 35, 230–244. [Google Scholar] [CrossRef]
- Bruun, P. The Bruun rule of erosion by sea-level rise: A discussion on large-scale two-dimensional usages. J. Coast. Res. 1988, 4, 627–648. [Google Scholar]
- Miller, J.K.; Dean, R.G. A simple shoreline change model. Coast. Eng. 2004, 51, 531–556. [Google Scholar] [CrossRef]
- Yates, M.L.; Guza, R.T.; O’Reilly, W.C. Equilibrium shoreline response: Observations and Modeling. J. Geophys. Res. 2009, 114, C09014. [Google Scholar] [CrossRef]
- Yates, M.L.; Guza, R.T.; O’Reilly, W.C.; Hansen, J.E.; Barnard, P.L. Equilibrium shoreline response of a high wave energy beach. J. Geophys. Res. 2011, 116, C04114. [Google Scholar] [CrossRef]
- Davidson-Arnott, R.G. Conceptual model of the effect of sea level rise on sand coasts. J. Coast. Res. 2005, 21, 1166–1172. [Google Scholar] [CrossRef]
- Davidson, M.A.; Lewis, R.P.; Turner, I.L. Forecasting of seasonal to multi-year shoreline change. Coast. Eng. 2010, 57, 620–629. [Google Scholar] [CrossRef]
- Splinter, K.D.; Turner, I.L.; Davidson, M.A.; Barnard, P.; Castelle, B.; Otman-Shay, J. A generalized equilibrium model for predicting daily to interannual shoreline response. J. Geophys. Res. 2014, 119, 1936–1958. [Google Scholar] [CrossRef]
- Pelnard-Considère, R. Essai de théorie de l’évolution des formes de rivage en plages de sable et de galets. Journées L’hydraulique 1957, 4, 289–298. [Google Scholar]
- Larson, M.; Hanson, H.; Kraus, N.C. Analytical solution of one-line model for shoreline change near coastal structure. J. Waterw. Port Coast. Ocean Eng. 1997, 39, 180–191. [Google Scholar] [CrossRef]
- Ashton, A.; Murray, A.B.; Arnoult, O. Formation of coastline features by large-scale instabilities induced by high-angle waves. Nature 2001, 414, 296–300. [Google Scholar] [CrossRef]
- Ashton, A.D.; Murray, A.B. High-angle wave instability and emergent shoreline shapes: 1. Modelling of sand waves, flying spits, and capes. J. Geophys. Res. 2006, 111, FD4011. [Google Scholar] [CrossRef]
- Reeve, D.; Chadwick, A.; Fleming, C. Coastal Engineering: Processes, Theory and Design Practice, 2nd ed.; Spon Press, Taylor & Francis: London, UK, 2012; 514p. [Google Scholar]
- U.S. Army Corps of Engineers (USACE). Shore Protection Manual; Coastal Engineering Research Center: Washington, DC, USA, 1984. [Google Scholar]
- Kamphuis, J.W.; Davies, M.H.; Nairn, R.B.; Sayao, O.J. Calculation of littoral sand transport rate. Coast. Eng. 1986, 10, 1–21. [Google Scholar] [CrossRef]
- Kamphuis, J.W. Alongshore sediment transport rate. J. Waterw. Port Coast. Ocean Eng. 1991, 117, 624–640. [Google Scholar] [CrossRef]
- Inman, D.L.; Nordstrom, C.E. On the tectonic and morphologic classification of coasts. J. Geol. 1971, 79, 1–21. [Google Scholar] [CrossRef]
- Short, A.; Masselink, G. Embayed and structurally controlled beaches. In Handbook of Beach and Shoreface Morphodynamics; Short, A., Ed.; Wiley: Chichester, UK, 1999; pp. 230–250. [Google Scholar]
- Silvester, R. Stabilization of sedimentary coastline. Nature 1960, 4749, 467–469. [Google Scholar] [CrossRef]
- Silvester, R.; Ho, S.K. Use of crenulate shaped bays to stabilize coasts. Coast. Eng. 1972, 2, 1347–1365. [Google Scholar]
- González, M.; Medina, R.; Losada, M. On the design of beach nourishment projects using static equilibrium concepts: Application to the Spanish coast. Coast. Eng. 2010, 57, 227–240. [Google Scholar] [CrossRef]
- Yamashita, T.; Tsuchiya, Y. Numerical simulation of pocket beach formation. Coast. Eng. 1992, 196, 2556–2566. [Google Scholar]
- Lim, C.; Lee, J.; Lee, J.L. Simulation of bay-shaped shorelines after the construction of large-scale structures by using a parabolic bay shape equation. J. Mar. Sci. Eng. 2021, 9, 43. [Google Scholar] [CrossRef]
- Silva, R.; Baquerizo, A.; Losada, M.Á.; Mendoza, E. Hydrodynamics of a headland-bay beach—Nearshore current circulation. Coast. Eng. 2010, 57, 160–175. [Google Scholar] [CrossRef]
- Lee, J.L.; Lim, C.; Pranzini, E.; Yu, M.J.; Chu, J.C.; Chen, C.J.; Hsu, J.R.C. Assessing downdrift control point and asymmetric double-curvature planform behind multiple detached breakwaters: Simple empirical method. Coast. Eng. 2023, 185, 104361. [Google Scholar] [CrossRef]
- Hsu, J.R.C.; Evans, C. Parabolic bay shapes and applications. Proc. Inst. Civ. Eng. 1989, 87, 557–570. [Google Scholar] [CrossRef]
- Klein, A.H.F.; Vargas, A.; Raabe, A.L.A.; Hsu, J.R.C. Visual assessment of bayed beach stability using computer software. Comput. Geosci. 2003, 29, 1249–1257. [Google Scholar] [CrossRef]
- Lim, C.B.; Hsu, J.R.C.; Lee, J.L. MeePaSoL: A MATLAB-based GUI software tool for shoreline management. Comput. Geosci. 2022, 161, 105059. [Google Scholar] [CrossRef]
- Rausman, R.; Klein, A.H.F.; Stive, M.J.F. Uncertainty in the application of the parabolic bay shape equation: Part 1. Coast. Eng. 2010, 57, 132–141. [Google Scholar] [CrossRef]
- Rausman, R.; Klein, A.H.F.; Stive, M.J.F. Uncertainty in the application of the parabolic bay shape equation: Part 2. Coast. Eng. 2010, 57, 142–151. [Google Scholar] [CrossRef]
- Silvester, R. Natural headland control of beaches. Cont. Shelf Res. 1985, 4, 581–596. [Google Scholar] [CrossRef]
- Tsai, C.P.; Chen, Y.C.; Ko, C.H. Prediction of bay-shaped shorelines between detached breakwaters with various gap spacings. Sustainability 2023, 15, 6218. [Google Scholar] [CrossRef]
- Chen, Y.C. Prediction of Bay-Shaped Shoreline and Storm Beach Buffer Width between Two Offshore Breakwaters. Doctoral Dissertation, Department of Civil Engineering, National Chung Hsing University, Taichung, Taiwan, 2024. [Google Scholar]
- Yasso, W.E. Plan geometry of headland-bay beaches. J. Geol. 1965, 73, 702–714. [Google Scholar] [CrossRef]
- Moreno, L.J.; Kraus, N.C. Equilibrium shape of headland-bay beaches for engineering design. Proc. Coast. Sedi. 1999, 1, 860–875. [Google Scholar]
- Kemp, J.; Vandeputte, B.; Eccleshall, T.; Simos, R.; Troch, P. A modified hyperbolic tangent equation to determine equilibrium shape of headland-bay beaches. Coast. Eng. 2018, 16, 106. [Google Scholar] [CrossRef]
- USACE. Shore Protection Manual Online; Technical Note 1-61, U.S.; U.S. Army Corps of Engineers: Washington, DC, USA; Government Printing Office: Washington, DC, USA, 2002; pp. 35–56, Part III-2 54–56 & Part V-3 35–43. [Google Scholar]
- Lewis, W.V. The evolution of shoreline curves. Proc. Geol. Assess. 1938, 49, 107–126. [Google Scholar] [CrossRef]
- Jennings, J.N. The influence of wave action on coastline outline in plan. Aust. Geogr. 1955, 6, 36–44. [Google Scholar] [CrossRef]
- Davies, J.L. Wave refraction and the evolution of shoreline curves. Geogr. Stud. 1958, 5, 1–14. [Google Scholar]
- Tan, S.K.; Chiew, Y.M. Analysis of bayed baches in static equilibrium. J. Waterw. Port Coast. Ocean Eng. 1994, 120, 145–153. [Google Scholar] [CrossRef]
- Uda, T.; Serizawa, M.; Kumada, T.; Sakai, K. A new model for predicting three-dimensional beach changes by expending Hsu and Evans’ equation. Coast. Eng. 2010, 57, 194–202. [Google Scholar] [CrossRef]
- Lee, J.L. MeePaSoL: MATLAB-GUI Based Software Package; Sungkyunkwan University: Seoul, Republic of Korea, 2015; SKKU Copyright No. C-2015-02461. [Google Scholar]
- González, M.; Medina, R. On the application of static equilibrium bay formulations to natural and man-made beaches. Coast. Eng. 2001, 43, 209–225. [Google Scholar] [CrossRef]
- González, M.; Medina, R.; González-Ondina, J.; Osorio, A.; Méndez, F.J.; García, E. An integrated coastal modelling system for analyzing beach processes and beach restoration projects, SMC. Comput. Geosci. 2007, 33, 916–931. [Google Scholar] [CrossRef]
- Dean, R.G. Equilibrium beach profiles: Characteristics and applications. J. Coast. Res. 1991, 7, 53–84. [Google Scholar]
- Roelvink, J.A. Coastal morphodynamic evolution technique. Coast. Eng. 2006, 53, 277–287. [Google Scholar] [CrossRef]
- Roelvink, D.; Van Dongeren, A.; McCall, R.; Hoonhout, B.; van Rooijen, A.; van Geer, P.; de Vet, P.; Nederhoff, K.; Quataret, E. Technical Reference: Kingsday Release (Technical Report: Model Description and Reference Guide to Functionalities); Deltares, UNESCO-IHE Institute of Water Education and Delft University of Technology: Delft, The Netherlands, 2015; p. 141. [Google Scholar]
- Roelvink, D.; Reniers, A.; van Dongeren, A.; van Thiel de Vries, J.; McCall, R.; Lescinski, J. Modelling storm impacts on beaches, dune and barrier islands. Coast. Eng. 2009, 56, 1133–1152. [Google Scholar] [CrossRef]
- Khuong, T.C. Shoreline Response to Offshore Breakwaters in Prototype. Ph.D. Thesis, Department of Hydraulic Engineering, Delft University of Technology, Delft, The Netherlands, 2016; 148p. [Google Scholar]
- Lim, C.; Lee, J.L.; Hsu, J.R.C. Mitigating shoreline retreat between multiple detached breakwaters: Empirical and semi-analytical approach. Appl. Ocean. Res. 2025, 154, 104385. [Google Scholar] [CrossRef]
- Elshinnawy, A.I.; Medina, R.; González, M. Equilibrium planform of pocket beaches behind breakwater gaps: On the location of the intersection point. Coast. Eng. 2022, 173, 104096. [Google Scholar] [CrossRef]
- Hsu, J.R.C.; Yu, M.J.; Lee, F.C.; Benedet, L. Static bay beach concept for scientists and engineers: A review. Coast. Eng. 2010, 57, 76–91. [Google Scholar] [CrossRef]
- Abdel Aziz, K.M. Quantitative monitoring of coastal erosion and changes using remote sensing in a Mediterranean delta. Civ. Eng. J. 2024, 10, 1842–1862. [Google Scholar] [CrossRef]
- Rusdin, A.; Oshikawa, H.; Divanesia, A.M.A.; Hatta, M.P. Analysis and prediction of tidal measurement data from temporary stations using the least squares method. Civ. Eng. J. 2024, 10, 384–403. [Google Scholar] [CrossRef]
- Mousavi, S.H.; Kavianpour, M.R.; Yamini, O.A. Experimental analysis of breakwater stability with antifer concrete block. Mar. Georesour. Geotechnol. 2017, 35, 426–434. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, C.; Lee, J.-L.; Hsu, J.R.C. Empirical Geomorphic Approach to Complement Morphodynamic Modeling on Embayed Beaches. J. Mar. Sci. Eng. 2025, 13, 1053. https://doi.org/10.3390/jmse13061053
Lim C, Lee J-L, Hsu JRC. Empirical Geomorphic Approach to Complement Morphodynamic Modeling on Embayed Beaches. Journal of Marine Science and Engineering. 2025; 13(6):1053. https://doi.org/10.3390/jmse13061053
Chicago/Turabian StyleLim, Changbin, Jung-Lyul Lee, and John R. C. Hsu. 2025. "Empirical Geomorphic Approach to Complement Morphodynamic Modeling on Embayed Beaches" Journal of Marine Science and Engineering 13, no. 6: 1053. https://doi.org/10.3390/jmse13061053
APA StyleLim, C., Lee, J.-L., & Hsu, J. R. C. (2025). Empirical Geomorphic Approach to Complement Morphodynamic Modeling on Embayed Beaches. Journal of Marine Science and Engineering, 13(6), 1053. https://doi.org/10.3390/jmse13061053