
A Comprehensive Review of Ship Automatic Rudder Technology: Development, Challenges, and Prospects


Abstract
1. Introduction
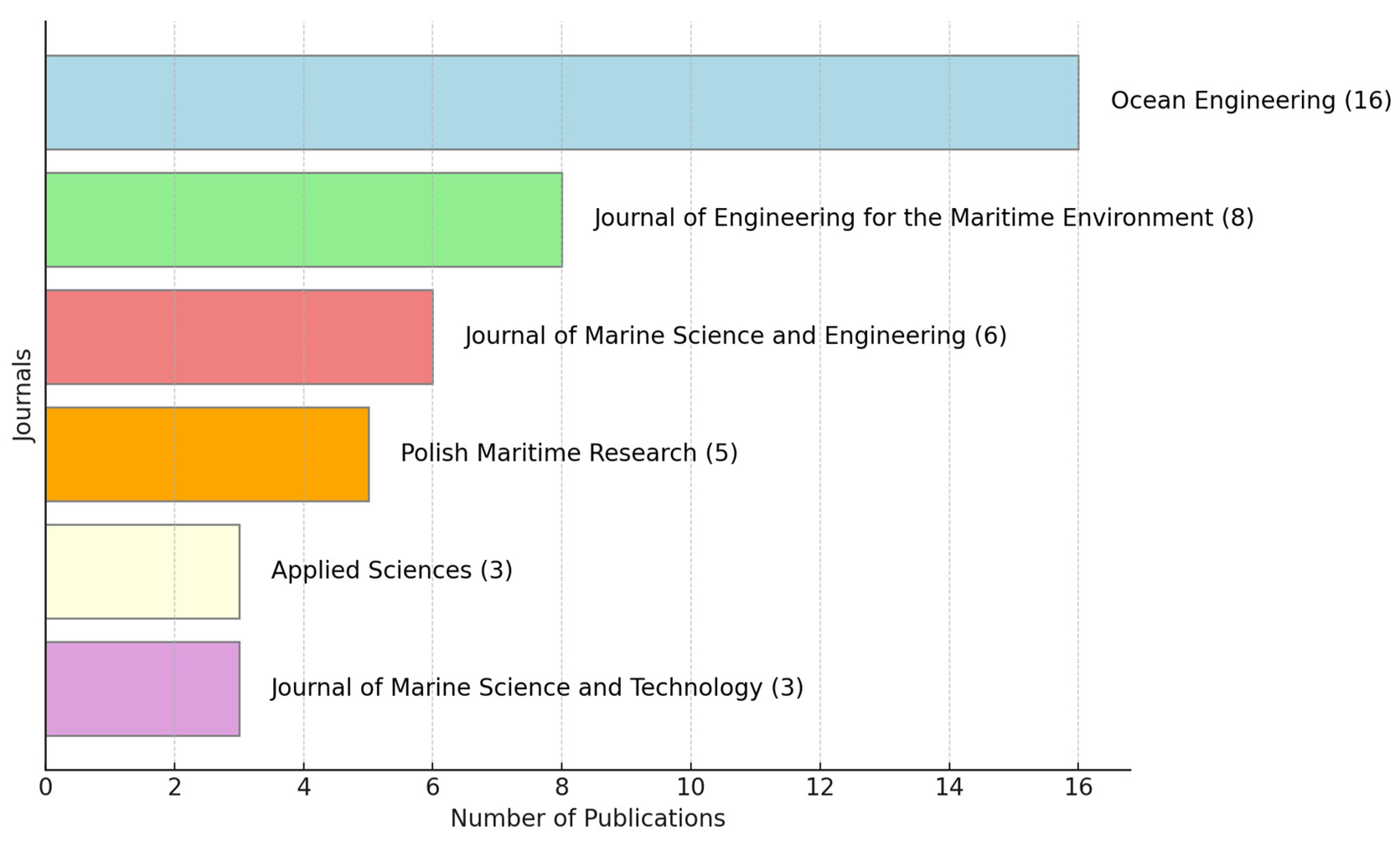
2. Analysis of Literature Dataset
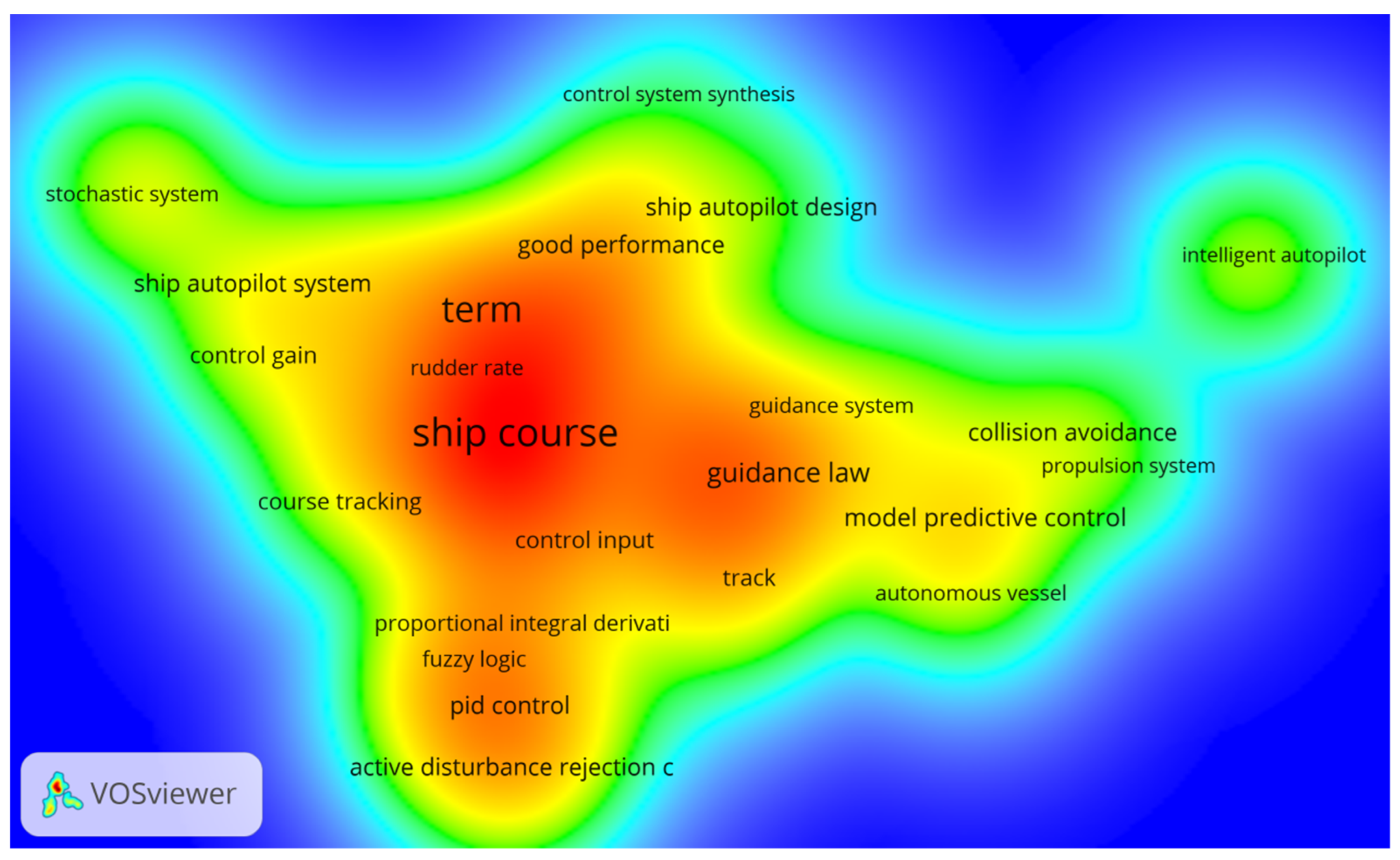
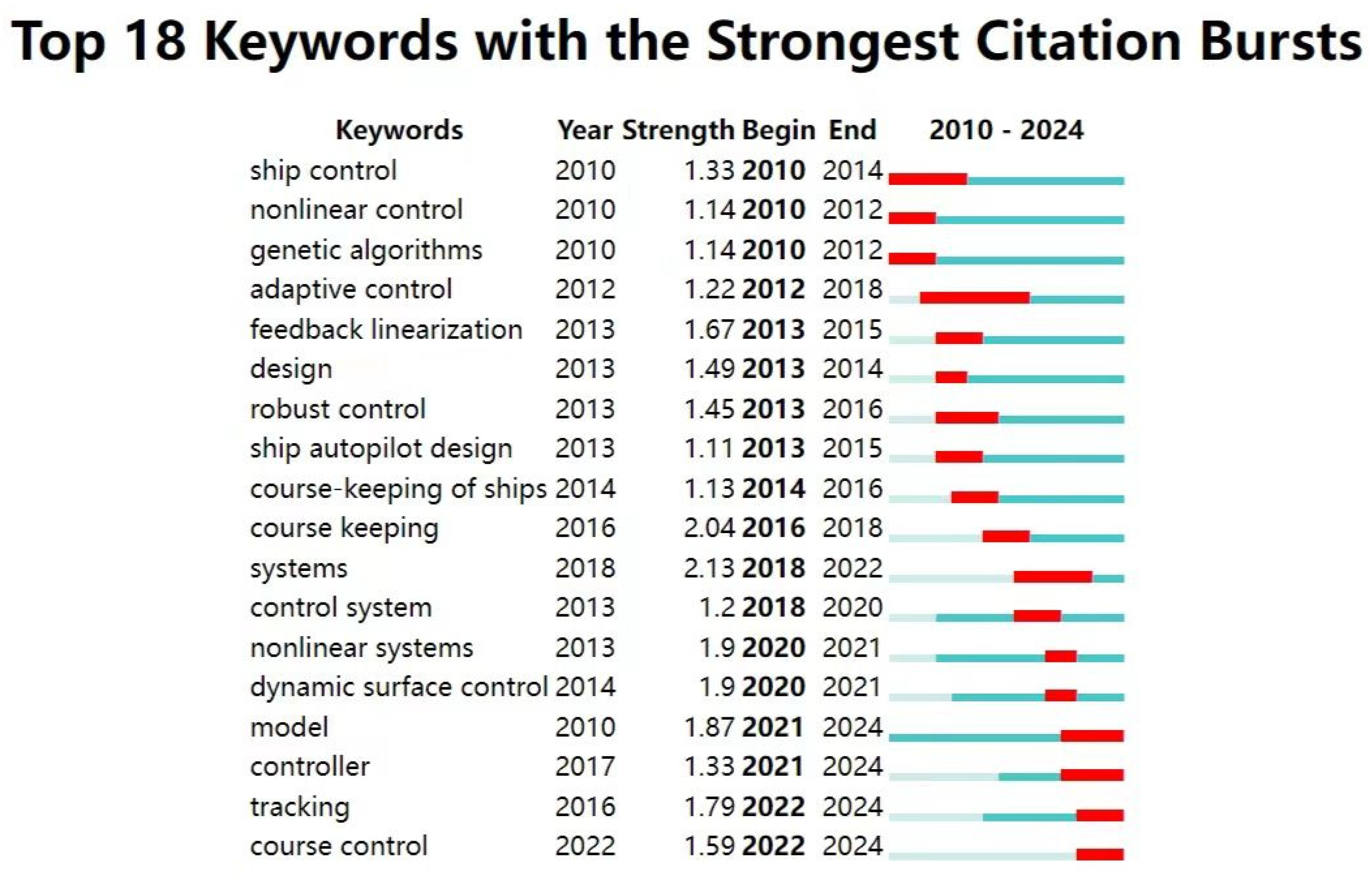
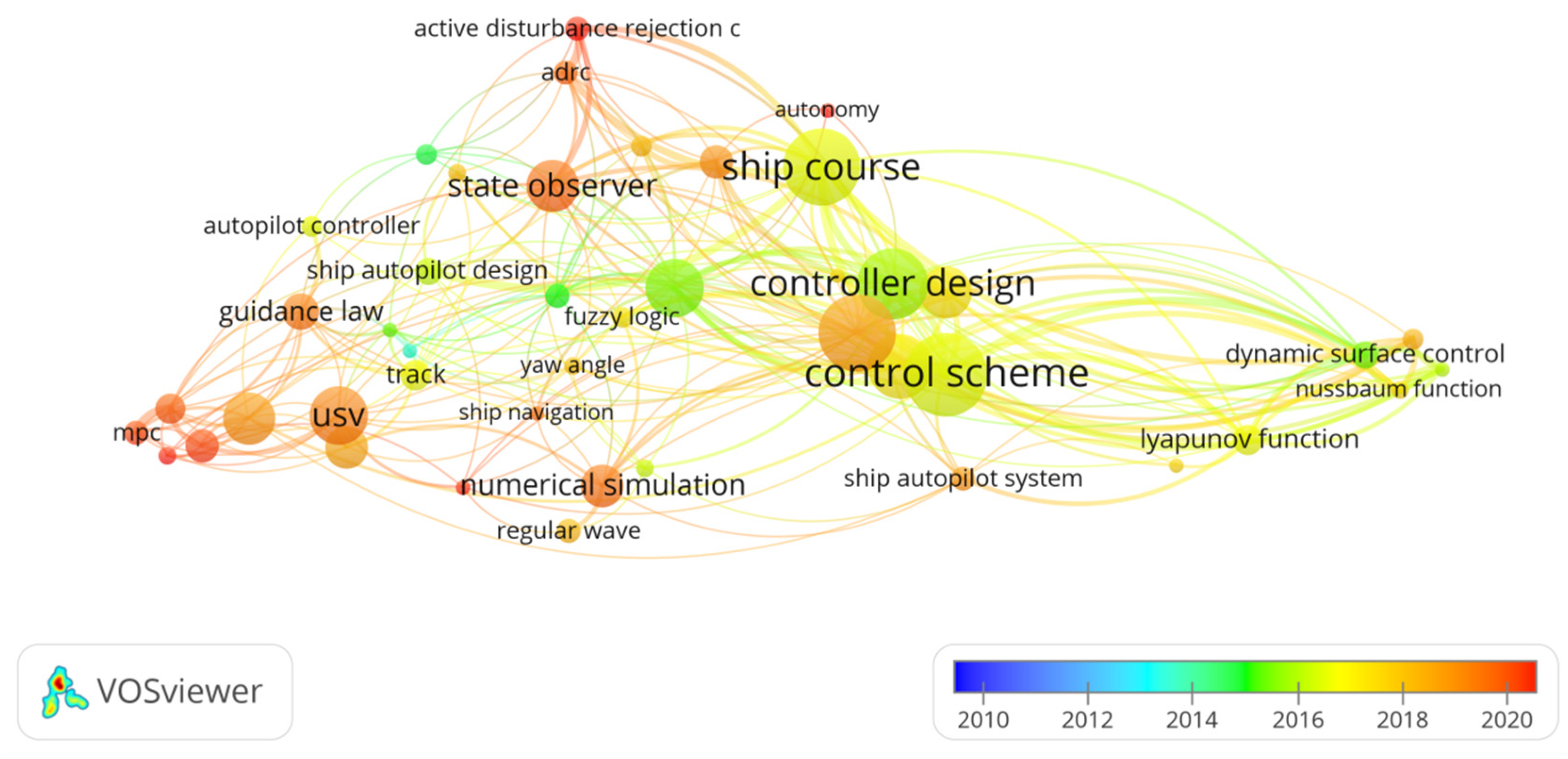
2.1. Keywords
2.2. Trends of Development
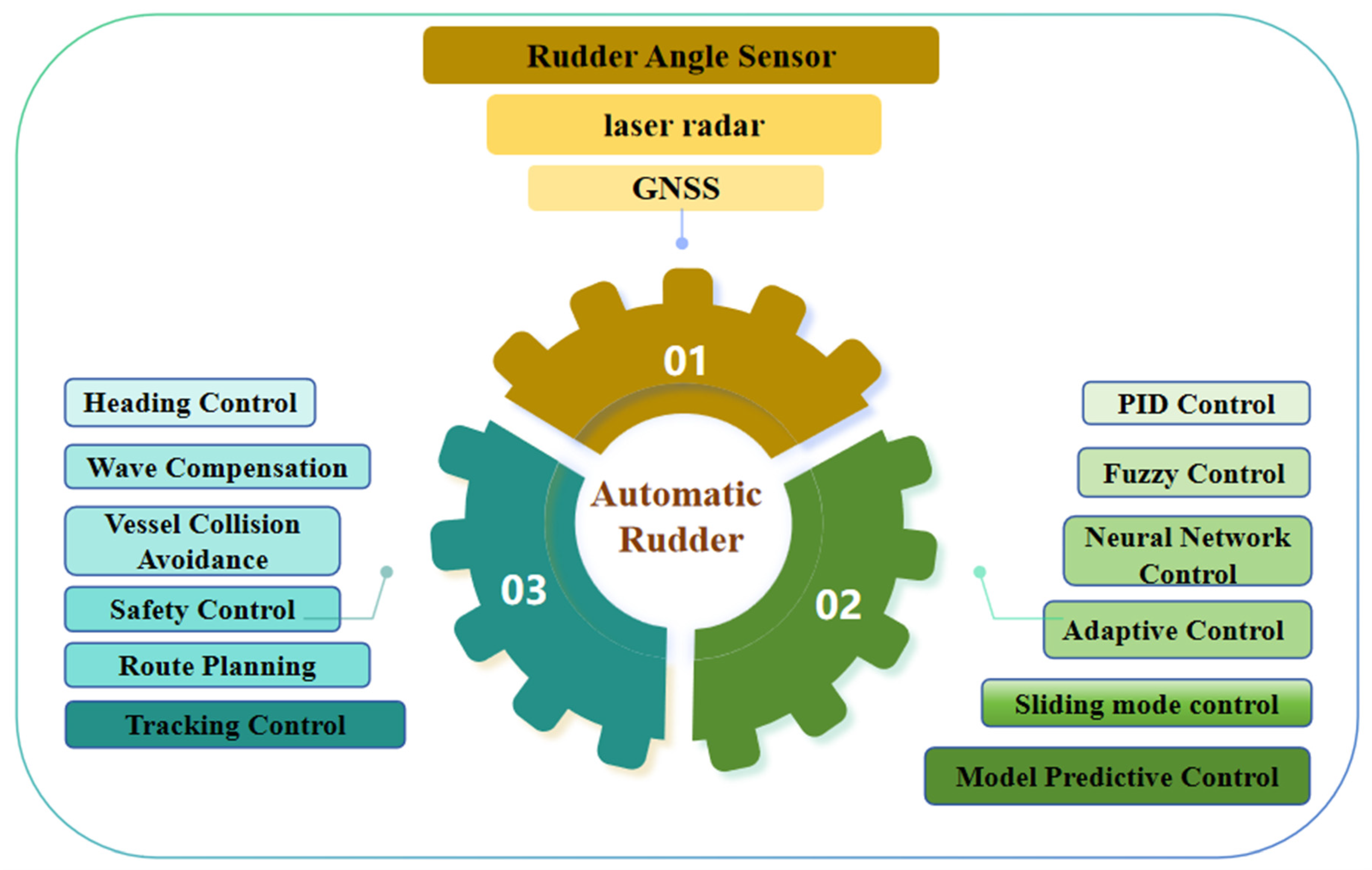
2.3. Related Technologies
3. Automatic Rudder Technologies
3.1. Sensor Technology
3.1.1. Global Navigation Satellite System (GNSS)
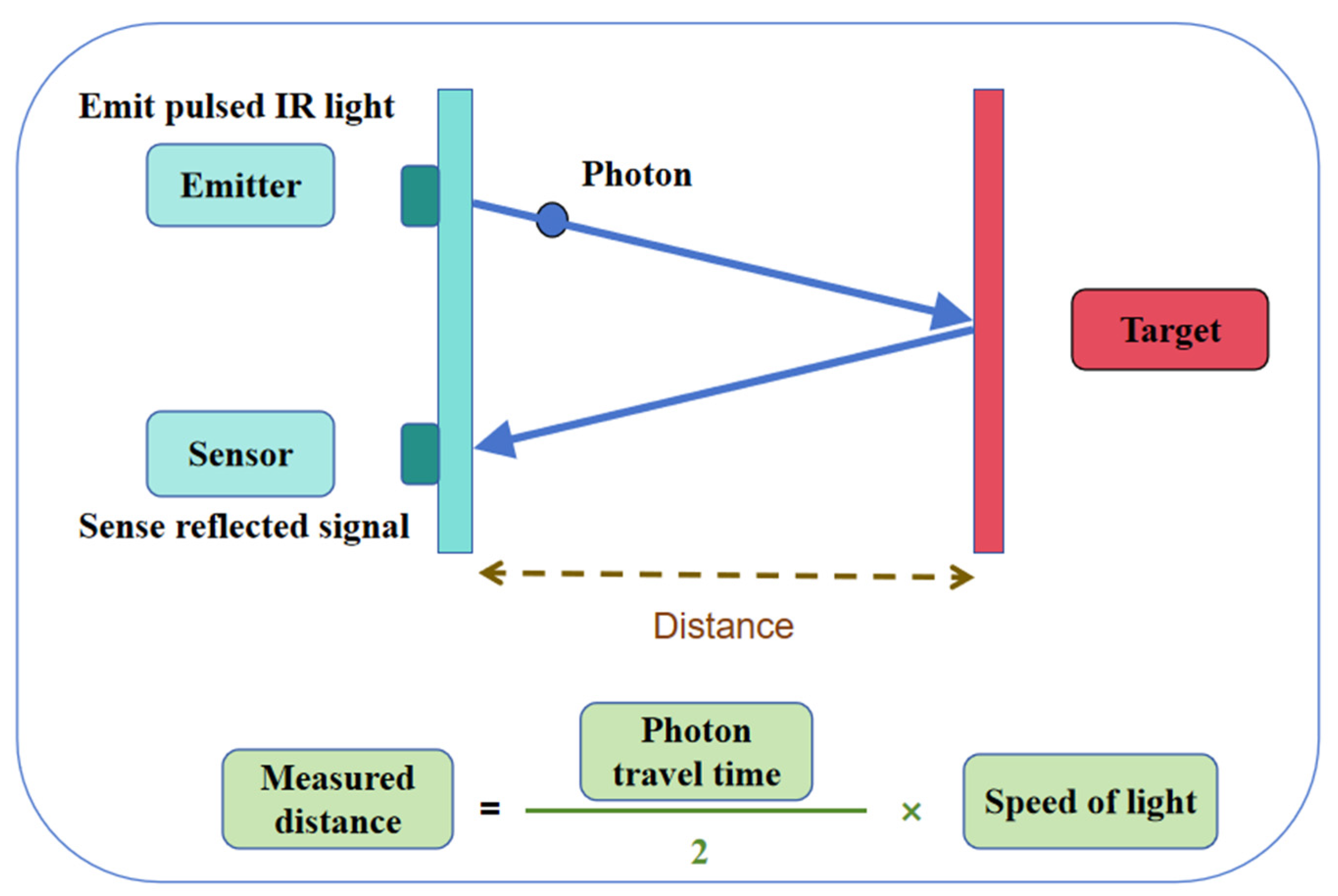
3.1.2. LiDAR
3.1.3. Rudder Angle Sensor
3.2. Control Algorithms
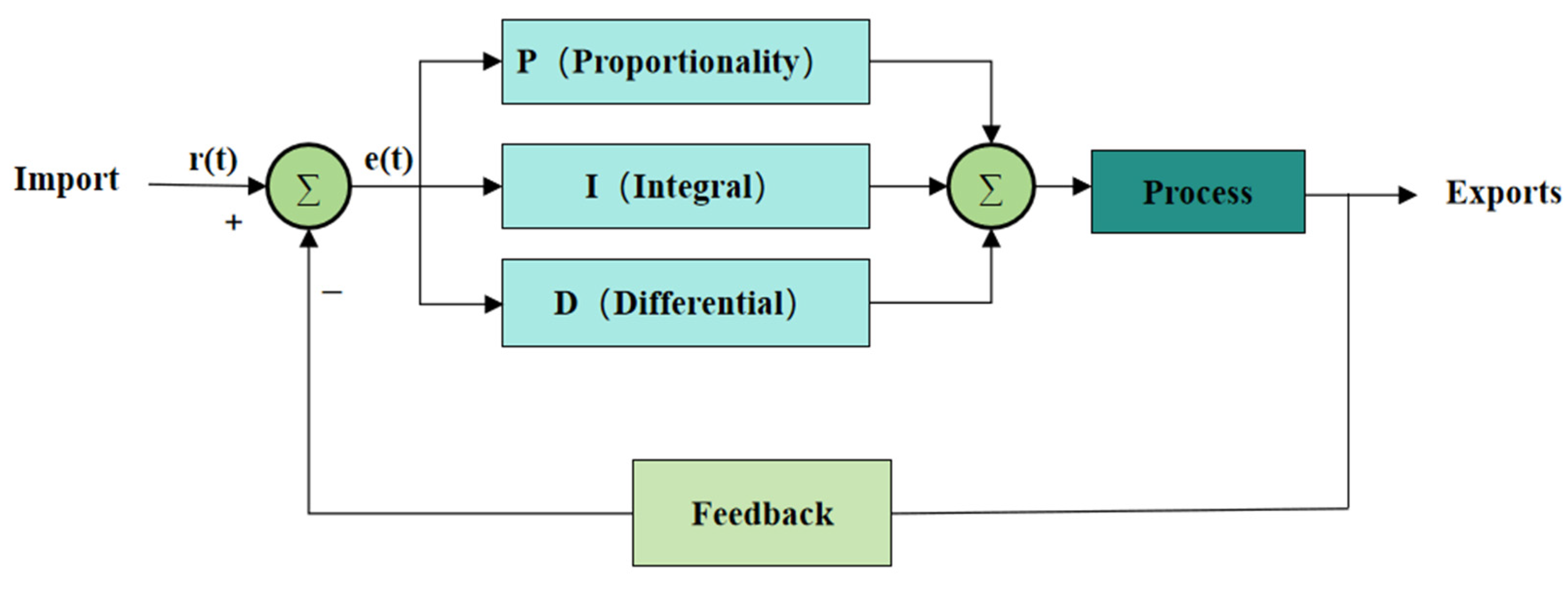
3.2.1. PID Control
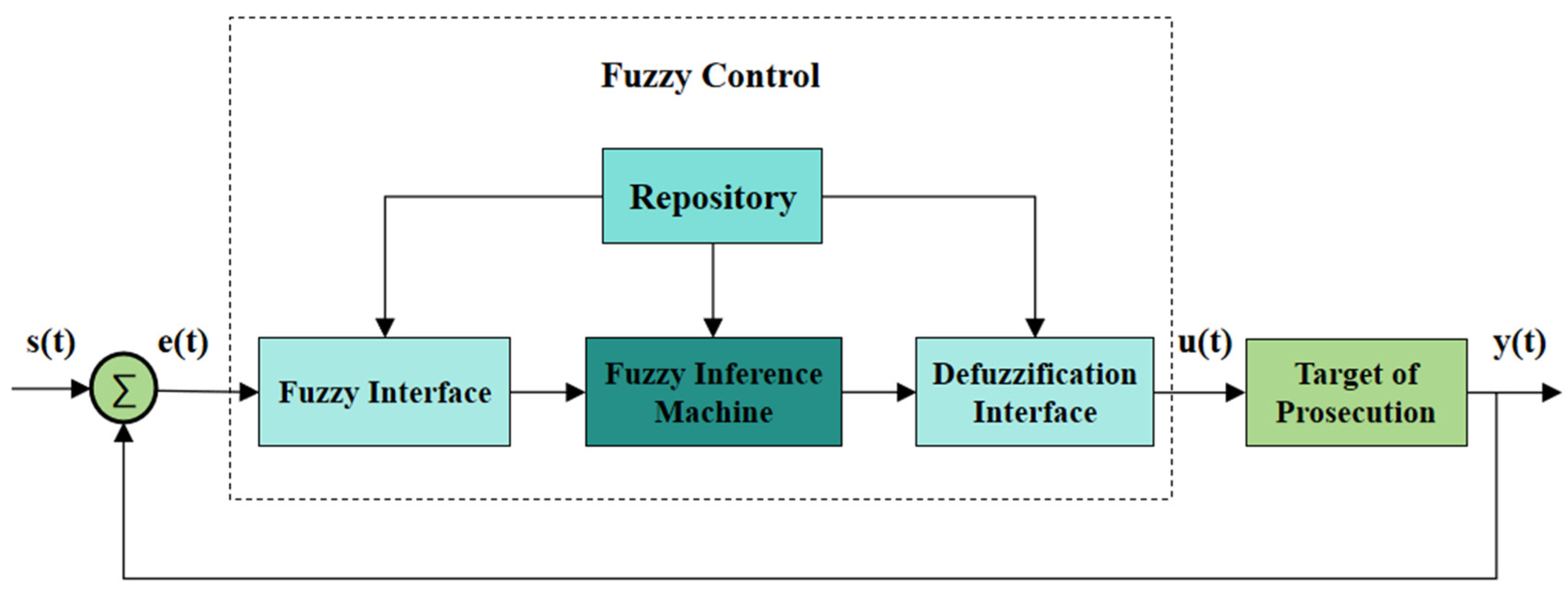
3.2.2. Fuzzy Control Algorithm
3.2.3. Neural Network Control Algorithm
3.2.4. Adaptive Control Algorithms
3.2.5. Sliding Mode Control Algorithm
3.2.6. Model Predictive Control Algorithm
3.2.7. Control Algorithms Based on Artificial Intelligence
4. Core Functions
4.1. Heading Control
4.2. Wave Compensation
4.3. Ship Collision Avoidance
4.4. Safety Control
4.5. Path Planning
4.6. Tracking Control
4.7. Evaluation Methods
5. Existing Challenges
6. Future Development Trend
- (1)
- In terms of application prospects, the future development of ship automatic rudder technology will focus on automation, autonomous decision-making, multi-sensor fusion, navigation optimization, safety enhancement and other research directions. With the continuous progress of technology and cost reduction, automatic rudders will be widely used in all kinds of ships, including ocean-going transportation ships, inland waterway transportation ships, special ships and marine engineering equipment. In the future, automation technology will play an important role in the fields of sea rescue, hazardous environment operations, ocean exploration, etc. It will also promote the change of sea logistics and military applications, and improve the overall operational efficiency and safety.
- (2)
- In terms of technical prospects, the future development of ship automatic rudder technology will focus on the deepening application of intelligent and autonomous technology, the fusion of high-precision positioning and navigation technology, the continuous optimization of control algorithms and path planning, and the continuous progress of multi-sensor fusion technology. The development and application of these technologies will further enhance the navigation efficiency and safety of ships, and promote the transformation and upgrading of the shipping industry and sustainable development.
- (3)
- Beyond control algorithm advancements, future research should also address the hydrodynamic efficiency and design optimization of the rudder itself, which plays a vital role in steering performance and energy consumption. Various efficient rudder configurations—such as flap rudders, high-lift rudders, and twisted rudders—have demonstrated significant improvements in lift-to-drag ratios, maneuverability, and propulsion interaction. Flap rudders, for instance, incorporate a trailing edge flap to increase lift at low angles, making them particularly effective in port operations and sharp turning maneuvers [121,122]. Twisted rudders are geometrically adapted to align with the propeller wake, thereby minimizing rotational losses and enhancing overall propulsion efficiency [123,124]. These physical improvements reduce the required rudder angle deflection to achieve equivalent turning moments, thus lowering actuation energy and improving responsiveness. For autonomous and intelligent navigation systems, integrating hydrodynamically optimized rudder designs with adaptive control algorithms could provide synergistic benefits, enhancing not only navigation accuracy but also energy efficiency in real-time. Future development should therefore promote a co-design paradigm, where mechanical rudder characteristics and intelligent control logic are developed in tandem.
- (4)
- In terms of laws and regulations, with the continuous development of automated rudder technology on ships, relevant laws and regulations will face new challenges focusing on navigation safety, liability determination, data protection, and the development of international standards. The future legal framework needs to clarify the safety standards, emergency response procedures and fault-handling mechanisms of automatic rudder systems to ensure the stability and safety of ships in automated navigation. Meanwhile, data privacy and cybersecurity will become key issues, especially in the context of connecting ships’ automated rudders with other intelligent systems. The issue of liability determination will also become complex, involving multiple parties such as shipowners, technology providers and developers of automated systems.
- (5)
- Looking ahead, future developments in ship automatic rudder systems must account for the challenges posed by maneuvering in restricted waters and preventing grounding incidents. While autonomous navigation systems are progressing rapidly, navigating in narrow or congested waters such as ports, harbors, and shallow coastal regions presents unique difficulties that traditional systems may not address effectively [125]. These areas are characterized by limited maneuvering space, dynamic environmental changes, and the presence of multiple moving and stationary obstacles. Ensuring safe navigation in such environments requires real-time decision-making, precise path planning, and the integration of advanced sensors for obstacle detection and avoidance [97,98]. Additionally, grounding risk, particularly in areas with variable tides or poorly mapped seafloors, remains a critical concern for autonomous vessels. Research in this area could explore the integration of high-resolution bathymetric mapping, dynamic tide prediction systems, and intelligent control algorithms that allow vessels to adjust their course and speed proactively [126]. Enhancing the ability of automatic rudder systems to handle these complex scenarios will be essential for the safe operation of autonomous ships, especially in confined or hazardous waters.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, L.; Li, T. Observer-Based Autopilot Heading Finite-Time Control Design for Intelligent Ship with Prescribed Performance. J. Mar. Sci. Eng. 2021, 9, 828. [Google Scholar] [CrossRef]
- Zhao, D.; Yang, T.; Ou, W.; Zhou, H. Autopilot Design for Unmanned Surface Vehicle based on CNN and ACO. Int. J. Comput. Commun. Control 2018, 13, 429–439. [Google Scholar] [CrossRef]
- Liu, Z.; Lu, X.; Gao, D. Ship Heading Control with Speed Keeping Via a Nonlinear Disturbance Observer. J. Navig. 2019, 72, 1035–1052. [Google Scholar] [CrossRef]
- Han, B.; Duan, Z.; Peng, Z.; Chen, Y. A Ship Path Tracking Control Method Using a Fuzzy Control Integrated Line-of-Sight Guidance Law. J. Mar. Sci. Eng. 2024, 12, 586. [Google Scholar] [CrossRef]
- Sethuramalingam, T.K. Fuzzy Logic Controller Based Ship Navigation System. J. Phys. Conf. Ser. 2021, 1850, 012113. [Google Scholar] [CrossRef]
- Yang, X.; Liu, M.; Wang, X.; Hu, B.; Liu, M.; Wang, X. Ship Network Traffic Engineering Based on Reinforcement Learning. Electronics 2024, 13, 1710. [Google Scholar] [CrossRef]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M.H. Perception, Planning, Control, and Coordination for Autonomous Vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Li, R.; Dong, P. Path Planning of Maritime Autonomous Surface Ships in Unknown Environment with Reinforcement Learning; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Chen, C.; Delefortrie, G.; Lataire, E. Experimental Investigation of Practical Autopilots for Maritime Autonomous Surface Ships in Shallow Water. Ocean Eng. 2020, 218, 108246. [Google Scholar] [CrossRef]
- Ridwan, R. Advanced Development of Sensors’ Roles in Maritime-Based Industry and Research: From Field Monitoring to High-Risk Phenomenon Measurement. Appl. Sci. 2021, 11, 3954. [Google Scholar] [CrossRef]
- Chen, J.; Shan, Q.; Li, T.; Meng, Y.; Wang, X. Intelligent Ship Autopilot System Control Based on Generalized Fuzzy Hyperbolic Model. In Proceedings of the 2021 International Conference on Security, Pattern Analysis, and Cybernetics (SPAC), Chengdu, China, 18–20 June 2021; pp. 561–565. [Google Scholar]
- Innac, A.; Angrisano, A.; Gaglione, S.; Crocetto, N. GPS Precise Positioning Techniques for Remote Marine Applications. In Proceedings of the 2019 IMEKO TC-19 International Workshop on Metrology for the Sea, Genoa, Italy, 3–5 October 2019. [Google Scholar]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-Avoidance Navigation Systems for Maritime Autonomous Surface Ships: A State of the Art Survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Zhao, W.; Qi, S.; Liu, R.; Zhang, G.; Liu, G. A Review of Underwater Multi-source Positioning and Navigation Technology. In Advances in Guidance, Navigation and Control; Yan, L., Duan, H., Deng, Y., Eds.; ICGNC 2022, Lecture Notes in Electrical Engineering; Springer: Singapore, 2023; Volume 845. [Google Scholar]
- Zhang, Z.; Yang, N.W.; Yang, Y.J. Autonomous Navigation and Collision Prediction of Port Channel Based on Computer Vision and Lidar. Sci. Rep. 2024, 14, 11300. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.E.; Schröder-Hinrichs, J.U. Research Developments and Debates Regarding Maritime Autonomous Surface Ship (MASS): Status, Challenges and Perspectives; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Liang, B.; Zhao, W.; Wang, X.; Wang, X.; Liu, Z. Metric Reliability Analysis of Autonomous Marine LiDAR Systems Under Extreme Wind Loads. J. Mar. Sci. Eng. 2024, 12, 50. [Google Scholar] [CrossRef]
- Wang, W.L.C. An Efficient Ship Autopilot Design Using Observer-Based Model Predictive Control. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 203–212. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, L.; Meng, H.; Zhang, W.; Huang, G. A LiDAR Point Clouds Dataset of Ships in a Maritime Environment. IEEE/CAA J. Autom. Sin. 2024, 11, 1681–1694. [Google Scholar] [CrossRef]
- Liu, T.; Li, S.; Hu, X.; Guan, H.; Liu, J. Survey on Existing Technologies in Autopilot Systems: Current Status and Future Perspectives. In Proceedings of the 2023 7th International Conference on Transportation Information and Safety (ICTIS), Xi’an, China, 4–6 August 2023; pp. 1409–1416. [Google Scholar]
- Beirami, M.; Mousazadeh, H.; Motlagh, A.M. Virtual Rudder Feedback-Based Heading Control in Small Autonomous Surface Vehicles. ISA Trans. 2024, 145, 421–433. [Google Scholar]
- Beirami, M.; Lee, H.Y.; Yu, Y.H. Implementation of an Auto-Steering System for Recreational Marine Crafts Using Android Platform and NMEA Network. ISA Trans. 2015, 39, 577–585. [Google Scholar] [CrossRef]
- Yue, P.; Liang, X.; Zhao, Y. Adaptive Control for Automatic Rudder Systems Under Varying Sea States and Ship Types. J. Mar. Sci. Technol. 2022, 27, 1552–1563. [Google Scholar]
- Zhu, L.; Li, T.; Yu, R.; Wu, Y.; Ning, J. Observer-Based Adaptive Fuzzy Control for Intelligent Ship Autopilot with Input Saturation. Int. J. Fuzzy Syst. 2020, 22, 1416–1429. [Google Scholar] [CrossRef]
- Pham, D.-A.; Han, S.-H. Designing a Ship Autopilot System for Operation in a Disturbed Environment Using the Adaptive Neural Fuzzy Inference System. J. Mar. Sci. Eng. 2023, 11, 1262. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Świder, Z.; Trybus, L.; Stec, A. Consistent Design of PID Controllers for an Autopilot. Pol. Marit. Res. 2023, 30, 78–85. [Google Scholar] [CrossRef]
- Moradi, M.H.; Katebi, M.R. Predictive PID Control for Ship Autopilot Design. IFAC Proc. Vol. 2001, 34, 375–380. [Google Scholar] [CrossRef]
- Yao, B.; Yang, J.; Zhang, Q.; Guo, Z.; Hu, R. Research and Comparison of Automatic Control Algorithm for Unmanned Ship. In Proceedings of the 3rd International Conference on Control and Robotics Engineering (ICCRE), Nagoya, Japan, 20–23 April 2018; pp. 85–89. [Google Scholar]
- Le, M.D.; Nguyen, S.H.; Nguyen, L.A. Study on a New and Effective Fuzzy PID Ship Autopilot. Artif. Life Robot. 2004, 8, 197–201. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, M.; Lu, R. An on-Line Adaptive Hybrid PID Autopilot of Ship Heading Control Using Auto-Tuning BP & RBF Neurons. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3642–3647. [Google Scholar]
- Dlaba, T.; Alasan, M.; Krum, M.; Marvui, N. Pso-based Pid Controller Design for Ship Course-keeping Autopilot. Brodogradnja 2019, 70, 4. [Google Scholar] [CrossRef]
- Tomera, M. Fuzzy Self-Tuning PID Controller for a Ship Autopilot. In Marine Navigation; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Kwon, Y.; Park, S.; Lee, J. PID Compensating Model for Design of Ship’s Autopilot. In Proceedings of the 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Republic of Korea, 16–19 October 2016; pp. 1337–1339. [Google Scholar]
- Lin, C.F. Robust adaptive fuzzy control for nonlinear systems with unknown dead zones. IEEE Trans. Fuzzy Syst. 2000, 8, 471–482. [Google Scholar]
- Zhang, C.; Wan, L.; Liu, Y. Ship Heading Control Based on Fuzzy PID Control; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Yang, Y.; Zhou, C.; Ren, J. Model Reference Adaptive Robust Fuzzy Control for Ship Steering Autopilot with Uncertain Nonlinear Systems. Appl. Soft Comput. 2003, 3, 305–316. [Google Scholar] [CrossRef]
- Yansheng, Y. Output feedback Adaptive Robust Control Algorithm Applied to Ship Steering Autopilot with Uncertain Non-linear System. In Proceedings of the World Congress on Intelligent Control & Automation, Shanghai, China, 10–14 June 2002; IEEE: New York, NY, USA, 2002. [Google Scholar]
- Liu, Y.; Zhu, Q. Adaptive Fuzzy Control for Ship Autopilot with Course Constraint Based on Event-Triggered Mechanism. In Proceedings of the 7th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS), Guangzhou, China, 13–15 November 2020. [Google Scholar]
- Le, M.D.; Nguyen, T.H.; Nguyen, T.T.; Nguyen, S.P.; Hoang, T.D. A New and Effective Fuzzy PID Autopilot for Ships. In Proceedings of the 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16–20 July 2003; IEEE: New York, NY, USA, 2003. [Google Scholar]
- Wang, L.; Wu, Q.; Liu, J.; Li, S.; Negenborn, R.R. State-of-the-Art Research on Motion Control of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef]
- Melnyk, O.; Onishchenko, O.; Onyshchenko, S.; Shumylo, O.; Volyanskyy, S.; Bondar, A.; Cheredarchuk, N. Application of Fuzzy Controllers in Automatic Ship Motion Control Systems. Int. J. Electr. Comput. Eng. 2023, 13, 3948–3957. [Google Scholar] [CrossRef]
- Thanh, T.L. Self-Tuning Ship Autopilot Based on the Neural Network Concept: An Empirical Approach. Ships Offshore Struct. 2023, 18, 686–694. [Google Scholar]
- Im, N.K.; Nguyen, V.S. Artificial Neural Network Controller for Automatic Ship Berthing Using Head-Up Coordinate System. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Kwak, M.K.; Suh, S.H. Design of Neural-Network Based Autopilot Control System(II). J. Soc. Nav. Archit. Korea 1997, 34, 19–26. [Google Scholar]
- Zhang, X.; Zhou, H.; Zhao, C.; Su, Z.; Guan, W. Ship Steering Control Based on Quantum Neural Network. Complexity 2019, 2019, 3821048. [Google Scholar]
- Ruan, M.; Wang, A.; Wang, D. Shared Control of Ship Autopilots and Human Pilots for Maritime Autonomous Surface Ship in the Presence of Actuator Anomalies. Syst. Sci. Control. Eng. 2022, 10, 300–311. [Google Scholar] [CrossRef]
- Sorensen, A.J. A Survey of Dynamic Positioning Control Systems. Annu. Rev. Control 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Amerongen, J.V. Adaptive Steering of Ships—A Model Reference Approach. Automatica 1984, 20, 3–14. [Google Scholar] [CrossRef]
- Van Amerongen, J. A Model for Reference Adaptive Autopilot Ships. Practical Results. IFAC Proc. Vol. 1981, 14, 1007–1014. [Google Scholar] [CrossRef]
- Du, J.; Guo, C. Nonlinear Adaptive Ship Course Tracking Control Based on Backstepping and Nussbaum Gain. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June 2004–2 July 2004; IEEE: New York, NY, USA, 2005. [Google Scholar]
- Li, B.; Liu, S.; Zhang, G.; Zhang, X. Robust Adaptive Course-Keeping Control and Its Application to Ship Autopilot. In Proceedings of the China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 566–570. [Google Scholar]
- Lim, C.C.; Forsythe, W. Autopilot for Ship Control. Part 1: Theoretical Design. IEE Proc. D Control Theory Appl. 1983, 130, 281–287. [Google Scholar] [CrossRef]
- Eraslan, E.; Yildiz, Y.; Annaswamy, A.M. Shared Control Between Pilots and Autopilots: Illustration of a Cyber-Physical Human System; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Chen, X.; Zhang, X. Nonlinear Feedback Control Based on ANFIS. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Liu, Z. Adaptive Sliding Mode Control for Ship Autopilot with Speed Keeping. Pol. Marit. Res. 2018, 25, 21–29. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Bu, R. Radial Basis Function Neural Network Sliding Mode Control for Ship Path Following Based on Position Prediction. J. Mar. Sci. Eng. 2021, 9, 1055. [Google Scholar] [CrossRef]
- Ejaz, M.; Chen, M. Sliding Mode Control Design of a Ship Steering Autopilot with Input Saturation. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417703568. [Google Scholar] [CrossRef]
- Chu, R.; Liu, Z.; Chu, Z. Improved Super-Twisting Sliding Mode Control for Ship Heading with Sideslip Angle Compensation. Ocean Eng. 2022, 260, 111996. [Google Scholar] [CrossRef]
- Yan, H.; Xiao, Y.; Li, Q.; Wang, R. Differential Evolution Algorithm-Based Iterative Sliding Mode Control of Underactuated Ship Motion. Comput. Intell. Neurosci. 2021, 2021, 4675408. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, J.; Liang, X.; Liu, J.; Cheng, S.; Yi, H. Real-Sea Validation of a Model Predictive Controller’s Inherent Robustness for Medium-Scale Unmanned Trimaran Heading. Ocean Eng. 2024, 313, 119513. [Google Scholar] [CrossRef]
- Fadhok, M.I.; Pramujati, B.; Nurhadi, H. Design of sliding mode control for maneuver autonomous surface vehicle using genetic algorithm. AIP Conf. Proc. 2024, 2927, 040009. [Google Scholar]
- Jin, Z.; Liu, S.; Jin, L.; Chen, W.; Yang, W. Model Based Robust Predictive Control of Ship Roll/Yaw Motions with Input Constraints. Appl. Sci. 2020, 10, 3377. [Google Scholar] [CrossRef]
- Zhang, M.; Hao, S.; Wu, D.; Chen, M.L.; Yuan, Z.M. Time-Optimal Obstacle Avoidance of Autonomous Ship Based on Nonlinear Model Predictive Control. Ocean Eng. 2022, 266, 112591. [Google Scholar] [CrossRef]
- Cui, Y.; Osaki, S.; Matsubara, T. Reinforcement Learning Ship Autopilot: Sample-Efficient and Model Predictive Control-Based Approach. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Helling, S.; Meurer, T. Dual Collision Detection in Model Predictive Control Including Culling Techniques. IEEE Trans. Control Syst. Technol. 2023, 31, 2449–2464. [Google Scholar] [CrossRef]
- Xu, P.; Qin, H.; Ma, J.; Deng, Z.; Xue, Y. Data-Driven Model Predictive Control for Ships with Gaussian. Process. Ocean Eng. 2023, 268, 113420. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Z.; Zhou, J.; Xue, A.; Peng, D.; Gu, Y.; Chen, H. Research on A Ship Trajectory Classification Method Based on Deep Learning. Chin. J. Inf. Fusion 2024, 1, 3–15. [Google Scholar] [CrossRef]
- Li, H.; Jiao, H.; Yang, Z. Ship Trajectory Prediction Based on Machine Learning and Deep Learning: A Systematic Review and Methods Analysis. Eng. Appl. Artif. Intell. 2023, 126, 107062. [Google Scholar] [CrossRef]
- Sivaraj, S.; Rajendran, S.; Prasad, L.P. Data Driven Control Based on Deep Q-Network Algorithm for Heading Control and of a in Calm Water and Waves. Ocean Eng. 2022, 259, 111802. [Google Scholar] [CrossRef]
- Sivaraj, S.; Rajendran, S. Heading Control of a Ship Based on Deep Reinforcement Learning (RL). In Proceedings of the OCEANS 2022-Chennai, Chennai, India, 21–24 February 2022. [Google Scholar]
- Kendall, A.; Hawke, J.; Janz, D.; Mazur, P.; Reda, D.; Allen, J.M. Learning to Drive in a Day. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Lillicrap, T.P.; Hunt, J.J.; Pritzel, A.; Heess, N.; Erez, T.; Tassa, Y. Continuous control with deep reinforcement learning. arXiv 2015, arXiv:1509.02971. [Google Scholar]
- Le, T.T. Ship Heading Control System Using Neural Network. J. Mar. Sci. Technol. 2021, 26, 963–972. [Google Scholar] [CrossRef]
- Wu, C.; Yu, W.; Li, G.L.W. Deep Reinforcement Learning with Dynamic Window Approach Based Collision Avoidance Path Planning for Maritime Autonomous Surface Ships. Ocean Eng. 2023, 284, 115208. [Google Scholar] [CrossRef]
- Jiang, Z. The Application of Artificial Intelligence Technology in Shipping: A Bibliometric Review. J. Mar. Sci. Eng. 2024, 12, 624. [Google Scholar] [CrossRef]
- Asfihani, T.; Chotimah, K.; Fitria, I.; Subchan. Ship Heading Control Using Nonlinear Model Predictive Control. In Proceedings of the 3rd International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 10 December 2020; pp. 306–309. [Google Scholar]
- Liu, Z.; Chu, R. Robust Adaptive Heading Control for a Surface Vessel with Drift Angles. Ocean Eng. 2024, 205, 107310. [Google Scholar] [CrossRef]
- Shi, X.; Chen, P.; Chen, L. An Integrated Method for Ship Heading Control Using Motion Model Prediction and Fractional Order Proportion Integration Differentiation Controller. J. Mar. Sci. Eng. 2023, 11, 2294. [Google Scholar] [CrossRef]
- Yu, P.; Zhou, Y.; Sun, X.; Sang, H.; Zhang, S. Power-Efficient Event-Triggered Adaptive Heading Control for Wave Gliders. Ocean Eng. 2025, 318, 120175. [Google Scholar] [CrossRef]
- Min, F.; Yang, F.; Wang, G.; Ye, X. Research on the Heading Control of Underwater Vehicle Under Hover Condition. IEEE Access 2020, 8, 220908–220920. [Google Scholar] [CrossRef]
- Kang, H.H.; Lee, D.S.; Lim, J.S.; Lee, S.J.; Jang, J.; Jung, K.H.; Lee, J. A study on the Effectiveness of the Heading Control on the Mooring Line Tension and Position Offset for an Arctic Floating Structure Under Complex Environmental Loads. J. Mar. Sci. Eng. 2021, 9, 102. [Google Scholar] [CrossRef]
- Halvorsen, H.S.; Veraas, H.; Landstad, O.; Smines, V.; Fossen, T.I.; Johansen, T.A. Wave Motion Compensation in Dynamic Positioning of Small Autonomous Vessels; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Chen, W.; Wang, S.; Li, J.; Lin, C.H.; Yang, Y.; Ren, A. An ADRC-Based Triple-Loop Control Strategy of Ship-Mounted Stewart Platform for Six-DOF Wave Compensation. Mech. Mach. Theory 2023, 184, 105289. [Google Scholar] [CrossRef]
- Cai, Y.; Zheng, S.; Liu, W.; Qu, Z.; Han, J. Adaptive Robust Dual-Loop Control Scheme of Ship-Mounted Stewart Platforms for Wave Compensation. Mech. Mach. Theory 2021, 164, 104406. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, Z.; Shen, Z.; Sun, Y. Nonlinear Differential and Integral Sliding Mode Control for Wave Compensation System of Ship-Borne Manipulator; SAGE: London, UK, 2021. [Google Scholar]
- Wen, Y.; Li, W.; Zhou, S.; Gao, F.; Chen, W. Robust Sliding Mode Control with Adaptive Gravity Estimation of Ship-Borne Stewart Platform for Wave Compensation. Appl. Ocean Res. 2024, 148, 104004. [Google Scholar] [CrossRef]
- Xue, Y.; Lee, B.S.; Han, D. Automatic Collision Avoidance of Ships. Proc. Inst. Mech. Eng. M J. Eng. Marit. Environ. 2009, 223, 33–46. [Google Scholar] [CrossRef]
- Ito, M.; Zhang, F.; Yoshida, N. Collision Avoidance Control of Ship with Genetic Algorithm. In Proceedings of the IEEE International Conference on Control Applications, Kohala Coast, HI, USA, 22–27 August 1999; IEEE: New York, NY, USA, 1999. [Google Scholar]
- Johansen, T.A.; Cristofaro, A.; Perez, T. Ship Collision Avoidance Using Scenario-Based Model Predictive Control. In Proceedings of the IFAC Conference on Control Applications in Marine Systems, Oita, Japan, 13–16 September 2017. [Google Scholar]
- Junmin, M.; Mengxia, L.; Weixuan, H.; Xiaohan, Z.; Yixiong, H. Mechanism of Dynamic Automatic Collision Avoidance and the Optimal Route in Multi-Ship Encounter Situations. J. Mar. Sci. Technol. 2020, 26, 141–158. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Collision Avoidance Systems for Maritime Autonomous Surface Ships Considering Uncertainty in Ship Dynamics. IFAC-Pap. 2020, 53, 14614–14619. [Google Scholar] [CrossRef]
- Xiao, B.; Zhao, H.; Wang, L. Kinematic-Based K-reachability Region Method for Ship Collision Avoidance Under Dynamic Constraints. Ocean Eng. 2023, 273, 113934. [Google Scholar]
- Bai, T.; Xu, Y.; Sun, J. A Colregs-Compliant Collision Avoidance Approach Based on K-Reachability Sets and Trajectory Optimization. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19348–19359. [Google Scholar]
- Chen, Y.; Li, X.; Zhang, X. An Improved Reachability-based Method for Autonomous Vessel Collision Avoidance Considering Complex Constraints. J. Navig. 2021, 74, 1285–1304. [Google Scholar]
- Nguyen, Q.H.; Yoon, J. Dynamic Kinematic Reachability-Based Trajectory Planning for Multi-agent Autonomous Surface Vehicles. Ocean Eng. 2023, 272, 113855. [Google Scholar]
- Kuwata, Y.; Teo, J.; Fiore, G.; Karaman, S.; Frazzoli, E.; How, J.P. Real-Time Motion Planning with Applications to Autonomous Urban Driving. IEEE Trans. Control Syst. Technol. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Path Planning of Autonomous Marine Surface Vessels Using Ant Colony Optimisation. J. Navig. 2010, 63, 451–476. [Google Scholar]
- Chaal, M.; Ren, X.; BahooToroody, A.; Basnet, S.; Bolbot, V.; Banda, O.V. Research on Risk, Safety, and Reliability of Autonomous Ships: A Bibliometric Review. Saf. Sci. 2023, 167, 106256. [Google Scholar] [CrossRef]
- Roberts, G.N. Trends in Marine Control Systems. Annu. Rev. Control 2008, 32, 263–269. [Google Scholar] [CrossRef]
- Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. [Google Scholar] [CrossRef]
- Lee, C.; Lee, S. A Risk Identification Method for Ensuring AI-Integrated System Safety for Remotely Controlled Ships with Onboard Seafarers. J. Mar. Sci. Eng. 2024, 12, 1778. [Google Scholar] [CrossRef]
- Thomas, S.; Gareth, H.; Mcdonald, M.K. Autonomous Ship Collision Avoidance Navigation Concepts, Technologies and Techniques. J. Navig. 2008, 61, 129–142. [Google Scholar]
- Guoshuai, L.I.; Zhang, X.; Zhang, A. Research Hotspots and Tendency of Intelligent Ship Berthing Technology. Chin. J. Ship Res. 2024, 19, 3–14. [Google Scholar]
- Wang, S.; Huang, M.; Chen, C.; Sun, J.; Ma, F. A Path Planning Method for Ship Collision Avoidance Considering Spatial–Temporal Interaction Effects. Appl. Sci. 2022, 12, 5036. [Google Scholar] [CrossRef]
- Vagale, A.; Oucheikh, R.; Bye, R.T.; Osen, O.L.; Fossen, T.I. Path Planning and Collision Avoidance for Autonomous Surface Vehicles I: A Review. J. Mar. Sci. Technol. 2021, 26, 1292–1306. [Google Scholar] [CrossRef]
- Zhu, L.; Li, T. Observer-Based Adaptive Fuzzy Prescribed Performance Control for Intelligent Ship Autopilot. Syst. Sci. Control Eng. 2021, 9, 489–496. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, X.; Zheng, Y.; Du, Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors 2020, 20, 426. [Google Scholar] [CrossRef] [PubMed]
- Vweza, A.O.; Lee, D.J.; Hong, D.P.; Chong, K.T. Fast Terminal Sliding Mode Control for the Ship Steering Problem. Appl. Mech. Mater. 2013, 433–435, 1078–1085. [Google Scholar] [CrossRef]
- Londhe, P.S.; Patre, B.M. Adaptive Fuzzy Sliding Mode Control for Robust Trajectory Tracking Control of an Autonomous Underwater Vehicle. Intel. Serv. Robot. 2019, 12, 87–102. [Google Scholar] [CrossRef]
- Li, B. New Techniques in Motion Control and Path Planning of Marine Vehicles. J. Mar. Sci. Eng. 2024, 12, 176. [Google Scholar] [CrossRef]
- Hasanvand, A.; Seif, M.S. Adaptive Path-Following Control for Displacement Vessels at Any Loading Conditions Under Ocean Disturbances. J. Mar. Sci. Appl. 2024, 23, 900–913. [Google Scholar] [CrossRef]
- Pan, Y. Model Predictive Control of Unknown Nonlinear Dynamical Systems Based on Recurrent Neural Networks. IEEE Trans. Ind. Electron. 2012, 59, 3089–3101. [Google Scholar] [CrossRef]
- Tomasi, J.; Ro, K. Analytical Modeling and Simulation of an Autonomous Underwater Vehicle with Five Control Surfaces. In Proceedings of the International Society for Optics and Photonics, San Diego, CA, USA, 13–17 August 2006. [Google Scholar]
- Han, K.; Sung, J.; Kim, B. Application of an Adaptive Autopilot Design and Stability Analysis to an Anti-Ship Missile. Int. J. Aeronaut. Space Sci. 2011, 12, 78–83. [Google Scholar] [CrossRef]
- Raygosa-Barahona, R.; Garcia-Terán, M.Á.; Enriquez, C.; Olguín-Díaz, E. Experimental Evaluation of an Autonomous Surface Craft for Shallow-Water Bathymetry. Mar. Technol. Soc. J. 2017, 51, 59–67. [Google Scholar] [CrossRef]
- Belanger, F.; Millan, D.; Cyril, X. Submarine Autopilot Performance Optimization with System Identification. In Proceedings of the ISCSS Conference, Glasgow, UK, 2–4 October 2018. [Google Scholar]
- Zhang, P.; Zhu, B.; Zhao, J.; Fan, T.; Sun, Y. Performance Evaluation Method for Automated Driving System in Logical Scenario. Automot. Innov. 2022, 5, 299–310. [Google Scholar] [CrossRef]
- Das, S. Applicability of Sliding Mode Control in Autopilot Design for Ship Motion Control. In Proceedings of the International Conference on Recent Advances and Innovations in Engineering (ICRAIE-2014), Jaipur, India, 9–11 May 2014; pp. 1–6. [Google Scholar]
- Veitch, E.; Alsos, O.A. A Systematic Review of Human-AI Interaction in Autonomous Ship Systems. Saf. Sci. 2022, 152, 105778. [Google Scholar] [CrossRef]
- Kose, K.; Tanaka, H. Analysis of Hydrodynamic Characteristics of High Lift Rudders for Large Ships. Ocean Eng. 2015, 108, 639–649. [Google Scholar]
- Andren, H.; Johansson, R.; Svensson, T. On the Performance of High-Lift Rudders for Maneuvering and Energy Efficiency. J. Mar. Sci. Technol. 2019, 24, 756–764. [Google Scholar]
- Korkut, E.; Atlar, M. On the Improvement of Propeller–Rudder Interaction by Using a Twisted Rudder. Ocean Eng. 2003, 30, 2275–2293. [Google Scholar]
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion: Practical Estimation of Propulsive Power; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Burmeister, H.C.; Bruhn, W.; Walther, A. Developments Towards a Fully Autonomous Navigation System. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2014, 8, 61–66. [Google Scholar]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship Grounding Avoidance Using Predictive Control and Bathymetric Data. Control Eng. Pract. 2016, 53, 146–155. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Algorithm | Advantages | Drawbacks |
|---|---|---|
| PID control | ① Simple structure. ② Strong adaptability and convenient adjustment. ③ High control accuracy, widely used. ④ Model-independent. | ① Difficult to adjust parameters. ② Requires retuning in nonlinear or time-varying systems. ③ Limited disturbance-rejection ability. |
| Fuzzy control | ① Strong ability to handle uncertainty and nonlinearity. ② Strong robustness to changes in parameters and disturbances of the system. ③ Simple design and high realizability. | ① Complicated models and experience-dependent design. ② Performance depends heavily on rule base and membership function design; improper tuning can reduce responsiveness or increase error variance under disturbance. ③ Stability is difficult to prove. |
| Neural network control | ① High adaptability to complex and nonlinear ship dynamics, allowing for enhanced accuracy in automatic rudder control, particularly under varying sea conditions. ② Real-time adjustment of the automatic rudder system to achieve a more optimized effect of control. ③ Realize the intelligence and automation of the automatic rudder system, reducing the dependence on manual steering. | ① High requirement for training data. ② Long time for training. ③ High computational complexity. ④ Easy overfitting and poor interpretation. |
| Adaptive control | ① Effective handling of system uncertainty. ② Strong adaptability to model errors and disturbances. ③ Stronger ability to learn and adapt. | ① May be unstable if poorly initialized or with inadequate data. ② Large amount of calculation. ③ System stability depends on the undetermined parameters. |
| Sliding mode control | ① Sliding surface control is extremely insensitive to changes in system parameters and external perturbations. ② The sliding surface control can realize fast sliding and accurate tracking of the system state. ③ The algorithm is relatively simple and easy to understand. | ① The introduction of high-frequency regulation signals can lead to high-frequency oscillations in the control system. ② The phenomenon of overshooting may occur. ③ Controller output may be jittery in the vicinity of the sliding mold surface. |
| Model predictive control | ① Strong disturbance-rejection ability, can tolerate changes in system parameters and external interference to some extent. ② Model predictive control exhibits strong dynamic performance, including rapid response, stability under constraints, and the ability to maintain output tracking under varying conditions. ③ It is easy to deal with problems of multi-constraint optimization. | ① Complexity in parameter tuning, including the adjustment of the prediction horizon, control horizon, and weighting matrices. ② Large amount of calculation. ③ High sensitivity to model mismatch. |
| Artificial Intelligence Control | ① Adaptive decision-making capability, precision, and accuracy. ② Adaptability and flexibility. ③ Strong scalability and customizability. | ① High cost. ② High technical difficulty. ③ Strong dependence and vulnerability. |
| Years | Literatures | Evaluation Methods |
|---|---|---|
| 2006 | Tomasi J [114] | Dynamic modeling and numerical simulation of an autonomous underwater vehicle (AUV) with five hydrodynamic control surfaces are presented. |
| 2011 | Han K et al. [115] | Evaluation of automatic rudders using the stability of neural network control systems is presented. |
| 2017 | Raygosa-Barahona [116] | A simple experimental method for tuning low-level PID control parameters is presented. |
| 2018 | Belanger et al. [117] | Based on techniques such as computer simulation modeling and computational fluid dynamics (CFD), the hydrodynamic coefficients of a ship can be calculated to assess its performance under different sailing conditions. |
| 2020 | Chen et al. [9] | A model of a two-loop control system is proposed to evaluate the effect of external disturbances on a ship’s automatic rudder. |
| 2022 | Zhang et al. [118] | A performance evaluation method for an autonomous driving system in the full parameter space of logical scenarios is proposed. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, M.; Chen, Q.; Yan, D.; Zhang, Y. A Comprehensive Review of Ship Automatic Rudder Technology: Development, Challenges, and Prospects. J. Mar. Sci. Eng. 2025, 13, 851. https://doi.org/10.3390/jmse13050851
Zheng M, Chen Q, Yan D, Zhang Y. A Comprehensive Review of Ship Automatic Rudder Technology: Development, Challenges, and Prospects. Journal of Marine Science and Engineering. 2025; 13(5):851. https://doi.org/10.3390/jmse13050851
Chicago/Turabian StyleZheng, Minjie, Qianqiang Chen, Daowei Yan, and Yawei Zhang. 2025. "A Comprehensive Review of Ship Automatic Rudder Technology: Development, Challenges, and Prospects" Journal of Marine Science and Engineering 13, no. 5: 851. https://doi.org/10.3390/jmse13050851
APA StyleZheng, M., Chen, Q., Yan, D., & Zhang, Y. (2025). A Comprehensive Review of Ship Automatic Rudder Technology: Development, Challenges, and Prospects. Journal of Marine Science and Engineering, 13(5), 851. https://doi.org/10.3390/jmse13050851