1. Introduction
Autonomous Underwater Vehicles (AUVs) are important tools in oceanographic research, underwater exploration, and environmental monitoring, enabling data collection in regions inaccessible to traditional methods [
1,
2]. Robust navigation and positioning are essential for AUVs to follow designated trajectories, gather valid scientific data, and return to docking stations.
A fundamental obstacle to underwater AUV navigation is the inaccessibility of Global Navigation Satellite System (GNSS) signals due to the rapid attenuation of electromagnetic waves in water. Consequently, Inertial Navigation Systems (INS), based on dead-reckoning principles, have become the cornerstone of underwater navigation. INS offers the advantage of providing continuous, high-frequency navigation data without reliance on external signals [
3]. However, a critical limitation of INS lies in the inherent nature of the Inertial Measurement Unit (IMU). These sensors, while highly sensitive, are susceptible to biases and random errors. These errors, even if initially small, accumulate over time through the integration process inherent in dead-reckoning, leading to a progressive degradation of positional accuracy. This error propagation becomes particularly pronounced during extended underwater missions, significantly impacting the reliability of INS-based navigation alone [
4].
Currently, AUV underwater navigation primarily relies on integrated INS/DVL/PS navigation systems. Pressure sensors (PSs) offer high accuracy without cumulative errors, simplifying the three-dimensional navigation problem to a two-dimensional space [
5]. Doppler Velocity Logs (DVLs) in the bottom-tracking mode provide accurate absolute velocity measurements without cumulative errors, helping to correct exponentially divergent errors of the INS to a linear divergence state [
6]. The core limitation of this integrated navigation approach is that AUV requires continuous DVL bottom-tracking capability, which typically has a maximum effective range of approximately 200 m from the seafloor. When AUVs operate beyond this range, bottom-tracking becomes invalid, making it impossible to obtain absolute velocity information. In such cases, only the velocity relative to the water of the AUV can be measured. When ocean currents are present with unknown velocities, this water-relative velocity becomes insufficient for navigation assistance.
The challenge of AUV navigation in the presence of unknown ocean currents has been addressed through various approaches. Early approaches employed simplified models that treat ocean currents as constant and irrotational. Hegrenaes and Hallingstad [
7] presented a state-of-the-art model-aided inertial navigation system (MA-INS) for underwater vehicles under this assumption. Similarly, Wang et al. [
8] proposed a SINS/DVL integrated navigation method, with the use of an improved VBAKF algorithm to reduce noise interference, assuming that currents remain constant over short intervals. However, these simplified models inadequately represent the dynamic nature of marine environments, where currents rarely remain static [
9].
To better capture current dynamics, Gauss–Markov models have been implemented to characterize spatial and temporal variations in ocean currents [
10]. Li et al. [
11] proposed an ocean current coefficient estimation method for GNSS/EML/SINS integrated navigation, modeling ocean current velocity as a first-order Gaussian Markov process and using Kalman filter corrections to accurately estimate the current coefficient. Ben et al. [
12] introduced an integrated navigation algorithm based on an improved Expected-Mode Augmentation (IEMA) technique for INS/WT-DVL systems, addressing the limitations of using a single ocean current model.
Furthermore, Medagoda et al. [
13,
14] introduced a layer-based current model that divides the water column into discrete depth layers with constant current velocities within each layer. This approach acknowledges the vertical stratification of ocean currents but neglects horizontal spatial variations. Wang et al. [
15] further refined this concept by implementing a hierarchical water velocity estimation method. Yao et al. [
16] introduced a staggered grid-based water current-aided SINS/DVL integration solution that improves mid-water navigation by accounting for spatial variations, later enhancing this with a modified smoothing scheme [
17].
Recent advancements have focused on more comprehensive current field modeling. Wu et al. [
18] developed a cooperative current estimation method using multiple AUVs to collectively map flow fields. Shi et al. [
19,
20] proposed a framework for cooperative flow field estimation that leverages both relative and absolute motion-integration errors across multiple vehicles. A tree-based distributed method for cooperative flow field estimation, as proposed by He et al. [
21], uses a tree structure to allow AUVs to solve nonlinear equations for flow field estimation, requiring only a connected communication network among vehicles. While effective, these multi-vehicle approaches increase operational complexity and cost. For single-AUV operations, Klein et al. [
22] proposed a novel approach to estimate platform velocity during complete DVL outages based on past DVL measurements and a motion model. Liu et al. [
23] proposed a current compensation technique for SINS/DVL integrated navigation using a radial basis function (RBF) neural network, which predicts ground-relative velocity in real time but requires pre-training.
The radial basis function (RBF) approach has emerged as a powerful mathematical tool for the interpolation and approximation of complex functions across various scientific and engineering domains [
24]. Unlike traditional mesh-based methods, RBF offers a meshless framework that can handle scattered data points and complex geometries without requiring structured grids. Kong et al. [
25] introduced the use of RBF in combination with Tikhonov-Gaussian regularization to solve the ill-posed problem of reconstructing velocity fields in industrial furnaces. Ng and Leung [
26] introduced a method that uses RBFs to reconstruct flow fields and subsequently estimate the Finite-Time Lyapunov Exponent (FTLE) from limited Lagrangian trajectory data.
To address the limitations of existing methods, this paper introduces a novel approach for mid-water ocean current field estimation using an RBF model. Our method uniquely integrates terrain-based relative position constraints, derived from multibeam bathymetric survey data, with the RBF current model. These constraints are obtained through terrain matching techniques, providing observed information about the navigation drift due to ocean currents. By embedding the property of incompressibility into the RBF, our approach better captures spatial variations in current velocity and direction. The RBF model parameters are then optimized using the Levenberg–Marquardt algorithm to minimize the discrepancy between predicted and observed drift, effectively estimating the underlying current field.
The rest of this paper is structured as follows:
Section 2 details the methodology, encompassing the problem formulation, the RBF-based ocean current field modeling, the derivation of terrain-based relative position constraints using multibeam bathymetry, and the Levenberg–Marquardt optimization process for RBF parameter estimation.
Section 3 presents the results of numerical simulations and experiments based on real-world oceanographic data, validating the effectiveness of the proposed method and comparing its performance against conventional approaches.
Section 4 concludes the paper by summarizing the key findings, discussing the limitations of the current study, and outlining directions for future research.
2. Methods
2.1. Problem Formulation
The navigation dynamics of an AUV operating in an underwater environment can be described by a state-space model. The AUV state vector typically includes position, velocity, and attitude information,
where
represents the AUV position in the north–east coordinate frame,
denotes the surge and sway velocities in the body frame, and
is the heading angle. It should be noted that we define this state vector only in planar ordinate since depth can be accurately obtained with the pressure sensor, and the positions of an AUV are the main concerns in this paper.
The continuous-time kinematic equations governing AUV motion can be expressed as,
The DVL is a critical sensor for underwater navigation that measures velocity using the Doppler effect of acoustic signals. The velocity measurement accuracy of a DVL is directly proportional to its operating frequency. Higher operating frequencies provide more precise velocity measurements but result in limited operational range.
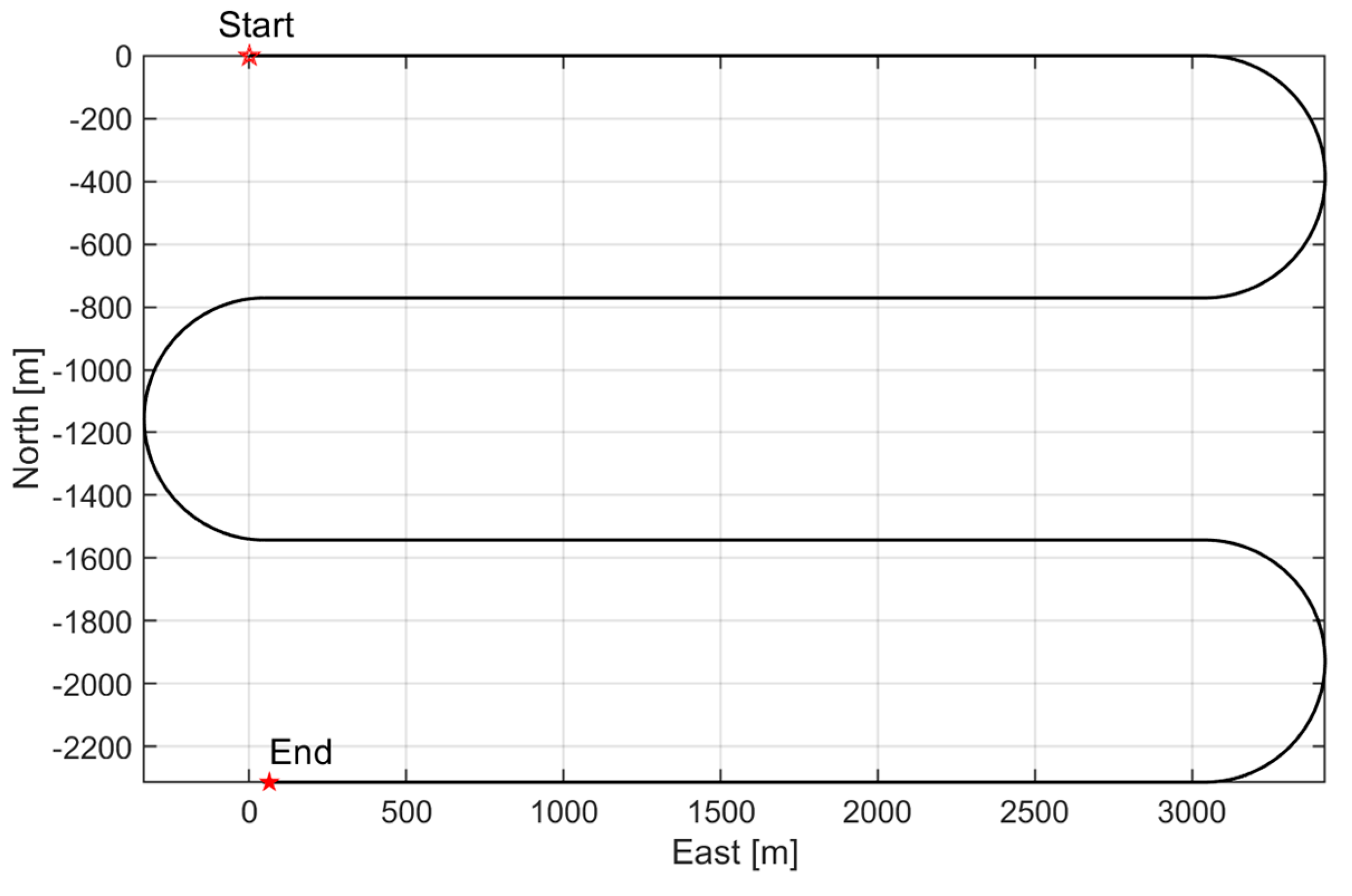
In mid-water environments, the altitude of AUV above the seafloor exceeds the DVL maximum detection depth and bottom-tracking capability is lost, as illustrated in
Figure 1. The DVL will no longer provide reliable ground-relative velocity information to assist AUV navigation.
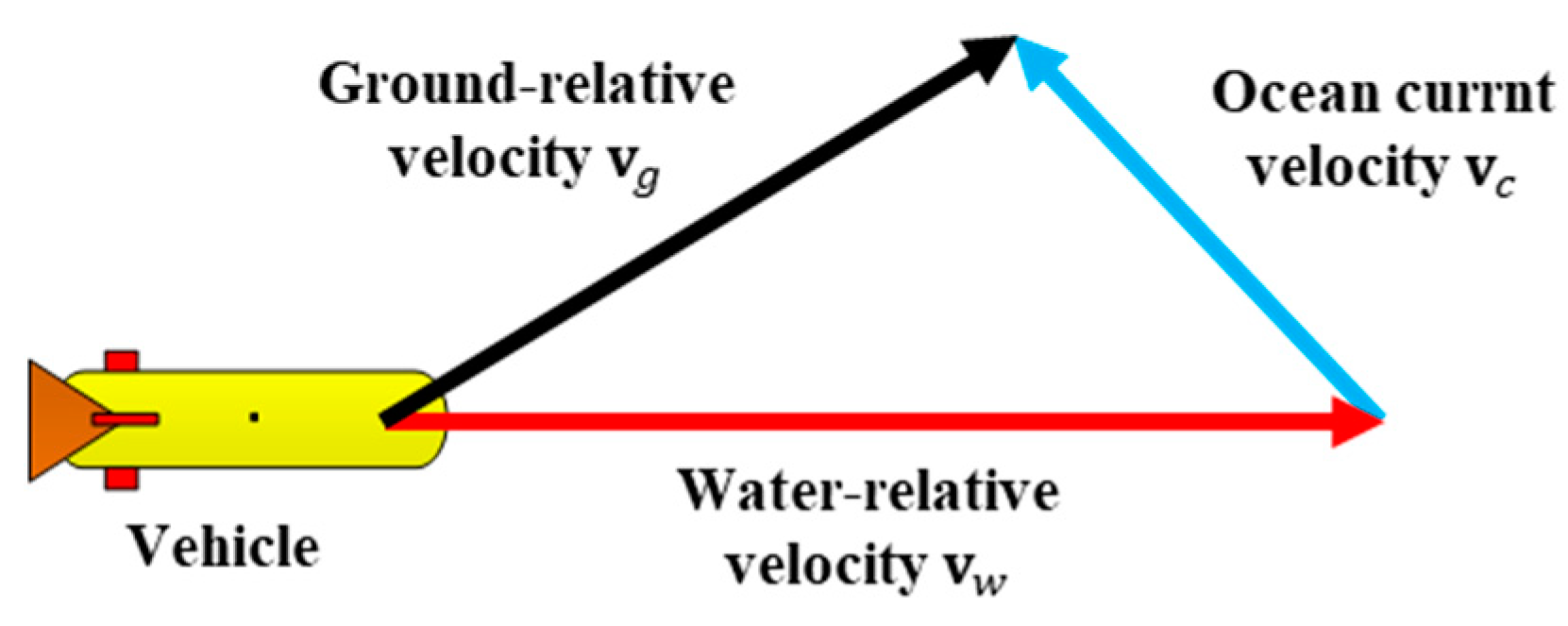
When the bottom-tracking mode is unavailable, the DVL will automatically switch to the water-tracking mode. As illustrated in
Figure 2, the ground-relative velocity of the AUV,
, is the vector sum of the water-relative velocity,
, and the ocean current velocity,
, as follows:
where
,
, and
are the vectors in the navigation frame,
, and
and
are the measured velocities in the DVL water-tracking mode, respectively.
Without loss of generality, the system state is assumed to be observable at initial time instant
, that is,
is known. The position of AUV,
, is ideally computed via dead-reckoning as
However, in practice, since
is unknown, the navigation system approximates positions by integrating only the measured water-relative velocity
This discrepancy between the estimated position
and the true position
represents the positioning error due to uncompensated ocean currents as
This error accumulates over time and can significantly impact navigation accuracy during long-endurance underwater missions.
2.2. Ocean Current Field Modeling with RBF
To accurately model the ocean current field, we start with the Navier–Stokes equations from computational fluid dynamics, coupled with the mass conservation law. The mathematical expression of the ocean current dynamic model is shown as
where
represents the ocean current velocity field,
denotes the gradient operator,
represents fluid density, and
represents time. This equation indicates that within a unit time, the net inflow and outflow in a fluid motion region are equal.
In the study of dynamic oceanography, ocean currents can be modeled as incompressible flows, meaning that density variations are negligible. While density in the ocean does depend on temperature and salinity, these variations are sufficiently small in mid-to-deep ocean currents. This simplification allows us to treat
as a constant, i.e.,
. Furthermore, considering that the mid-to-deep ocean currents of interest are primarily dominated by geostrophic flow, which exhibits relatively slow variations within the spatiotemporal scales of AUV operations, we can reasonably assume a time-invariant flow field. Consequently, Equation (8) simplifies to
Based on the potential flow theory [
27,
28] and the associated assumption of the Laplace equation [
29], the velocity field is expressed as the gradient of a velocity potential function
, as
Radial basis functions (RBFs) offer a versatile, mesh-free approach for representing complex, spatially varying functions [
30]. RBFs have properties of universal approximation and best approximation, which also are widely used for function approximation. Common RBF types include Gaussian, multiquadric, and thin-plate spline functions, each offering different interpolation characteristics suitable for various applications [
31]. In this study, we use the Gaussian RBF as the potential function to model the ocean current field. The general form of RBF can be written as follows:
where
denotes the position in the ocean current field;
denotes RBF;
denotes the number of RBFs; the subscript
denotes the
-th basis function; and
,
, and
are the weight, center, and width of the
-th RBF, respectively.
Physically, the RBF model works by placing center points in the ocean current field and combining their local effects, , to describe the velocity distribution. Each term represents a velocity effect starting from , with controlling its strength of the effect, setting the location, and determining the width of the effect reaches.
By substituting Equation (11) into Equation (10), we derive the ocean current as
We define each RBF parameter as
, and the parameters of the ocean current field model as
. Equation (10) means that once the parameters
are determined, the ocean current field can be reconstructed. Furthermore, the ocean current field consistently satisfies the incompressible flow property expressed in Equation (9), namely,
Therefore, the central problem addressed in this study is the estimation and optimization of all the RBF parameters to accurately capture the characteristics of a given ocean current field. This parameter estimation problem can be framed as an optimization problem, where the objective is to find the set of parameters that minimizes the discrepancy between the predicted velocity field from the RBF model and the measured velocity.
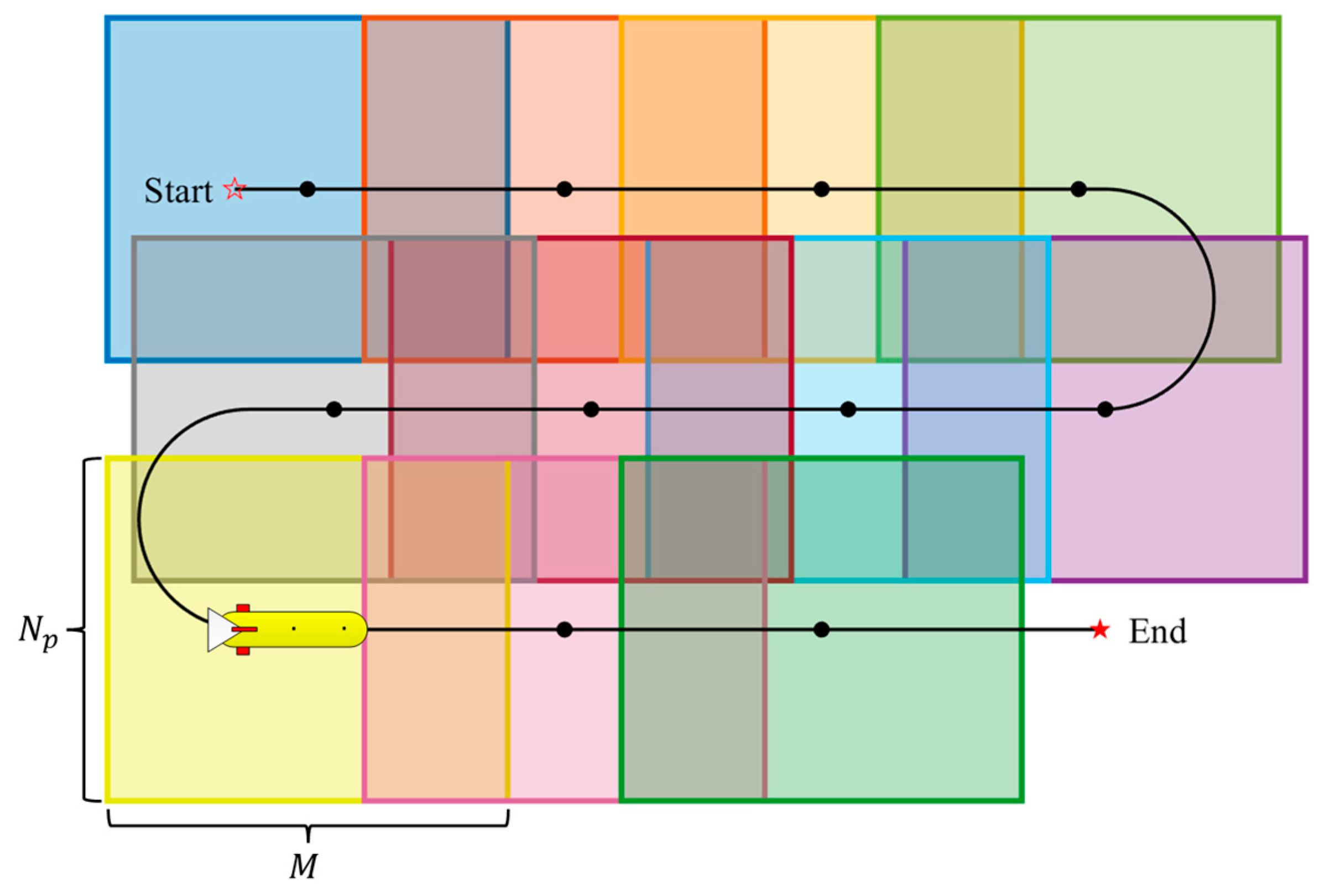
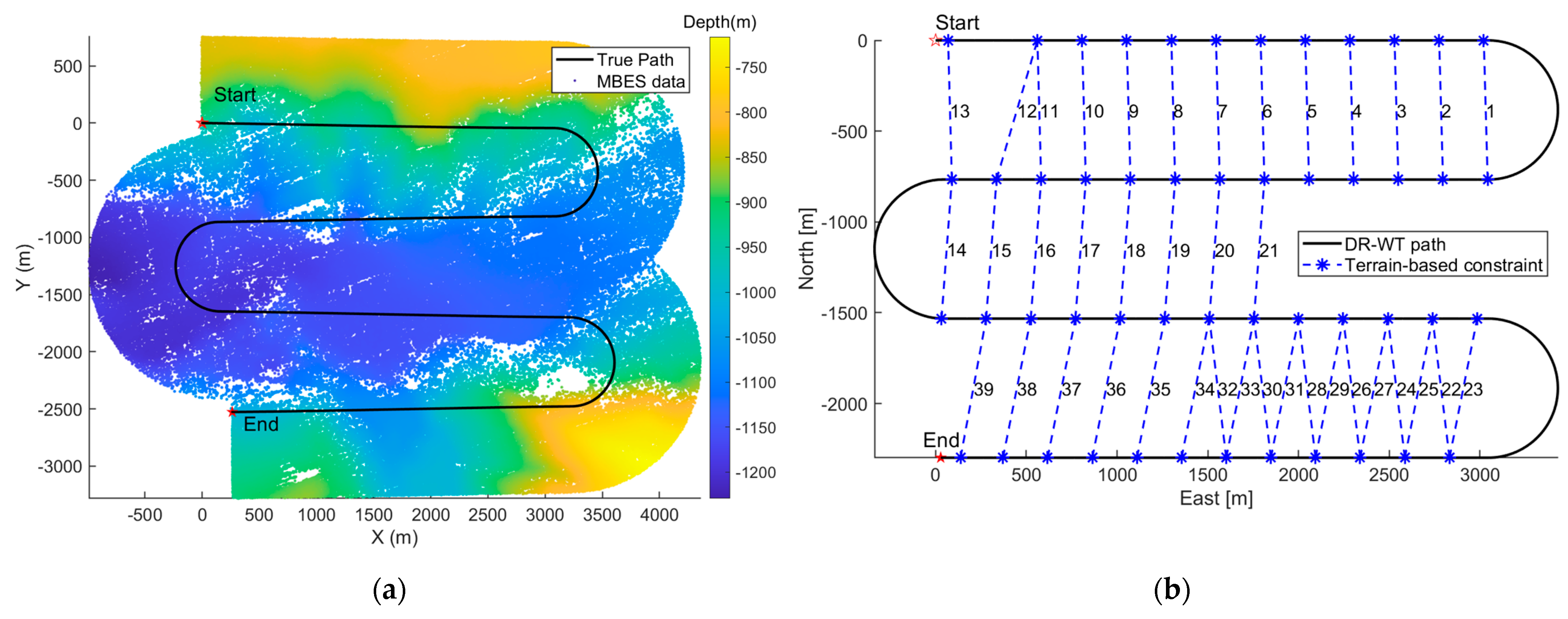
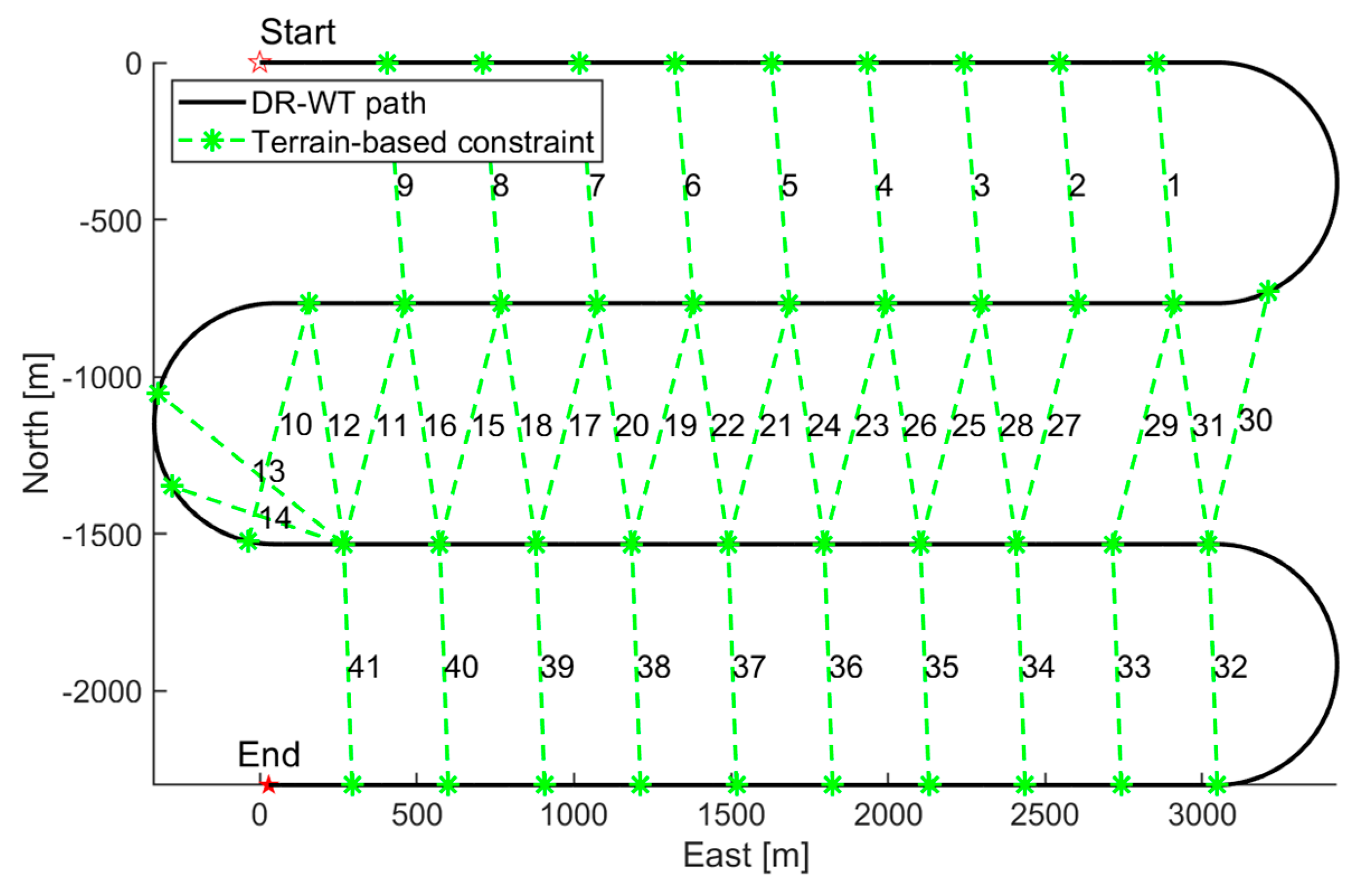
2.3. Terrain-Based Relative Position Constraints Based on MBES
In underwater environments, the AUV equipped with multibeam echo sounders (MBESs) collects bathymetric data along survey lines, generating submaps of the seafloor to determine their relative positions based on terrain matching. The spatial arrangement of survey lines is a critical factor in ensuring both complete seafloor coverage and the robustness of navigation adjustments. Line spacing is designed to achieve a minimum of 25% overlap between adjacent MBES swaths, with an optimal target of 50% overlap [
32]. This deliberate overlap provides numerous opportunities for detecting relative position constraints between submaps collected at different times during the mission, as illustrated in
Figure 3.
The MBES collects bathymetric data in the form of point clouds, with each ping producing a line-shaped terrain profile perpendicular to the AUV trajectory. For a single ping, the bathymetric point cloud can be expressed as
where
is the number of depth points in the ping,
denotes the horizontal coordinates of the
i-th point, and
corresponds to the measured depth value.
Assuming
consecutive pings are used to construct a submap, the point cloud model can be expressed as
where
represents the total number of depth points in the submap
.
To detect relative position constraints between overlapping submaps in underwater terrain matching, the point-to-plane Iterative Closest Point (ICP) algorithm is used to align bathymetric point clouds obtained from the MBES. Different from the conventional point-to-point ICP, this method minimizes the perpendicular distance from source points to the tangent planes of the target surface, aligning more effectively with the geometric constraints of continuous seafloor topography.
Given a source submap
and a target submap
with potential overlap, the point-to-plane ICP algorithm iteratively computes the rigid transformation matrix
, where
is the rotation matrix and
is the translation vector. The ICP algorithm begins by establishing point correspondences between
and
via a nearest-neighbor search. The alignment is optimized by minimizing the following objective function iteratively, as
where
,
,
represents the normal vector at target
.
Iterations continue until convergence, determined by a predefined threshold or maximum iteration limit. Once the optimal transformation
is obtained,
is transformed to
, computed as
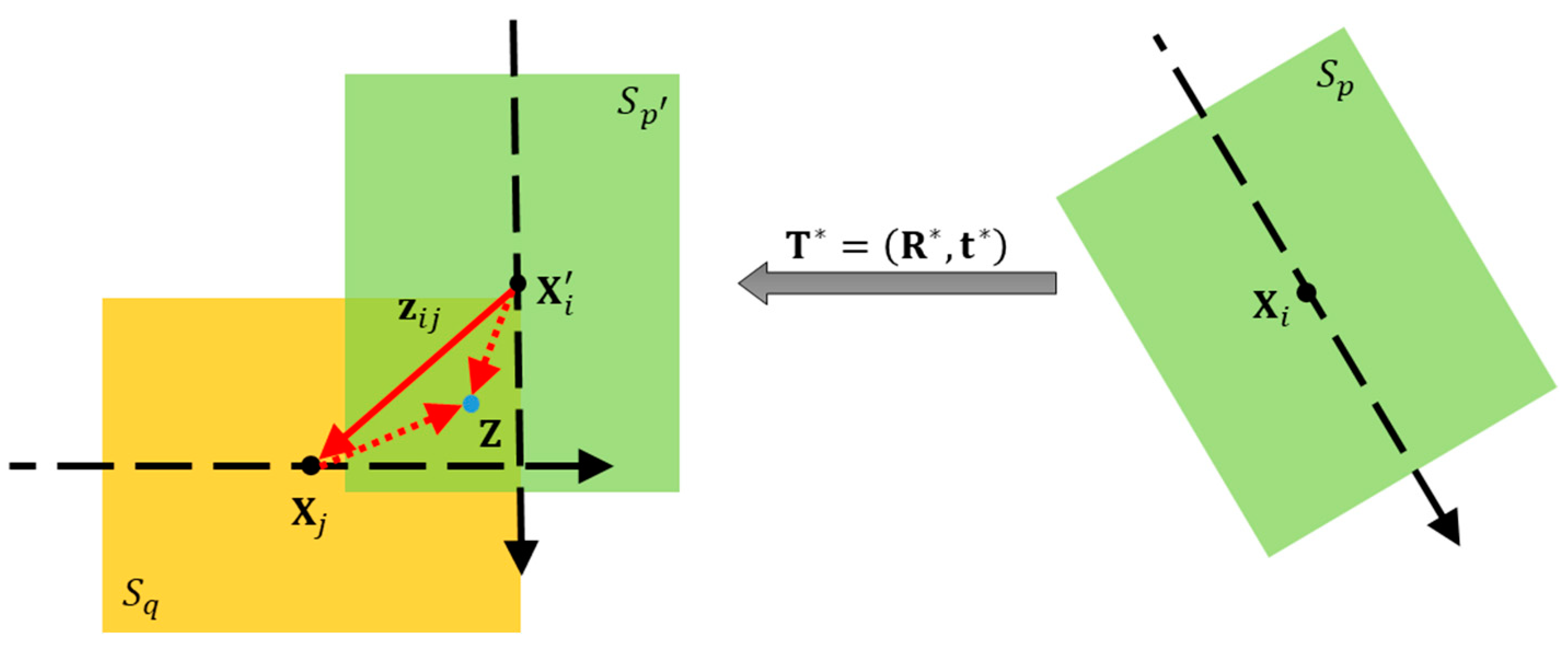
As illustrated in
Figure 4, a relative position constraint based on terrain matching can be formulated as,
where
(⋅) denotes the ICP algorithm;
and
are the centroids of submaps
and
, respectively; and
is the centroid of the overlapped region of
and
.
2.4. Levenberg–Marquardt Optimization for RBF Parameter Estimation
Building upon the terrain-based relative position constraints established in
Section 2.3, this section describes the optimization process for estimating RBF parameters that characterize the ocean current field affecting AUV navigation.
The estimation of RBF parameters, denoted as , is formulated as a nonlinear least-squares problem. The objective is to minimize the discrepancy between the predicted AUV drift due to the estimated ocean current field and the observed drift inferred from terrain-based relative position constraints.
For a relative position constraint between AUV poses at times
and
, the measured relative position displacement is denoted as
The predicted relative displacement based on the ocean current model is expressed as
where
represents the ocean current velocity at position
parameterized by
.
The cost function is defined to quantify the discrepancy between the measured displacement
and the predicted displacement
across all the
relative position constraints identified in the terrain matching algorithm, as
where
represents the RBF parameters set to be optimized, and
indexes each terrain-based relative position constraint.
The Levenberg–Marquardt (LM) algorithm is employed to minimize the cost function by iteratively adjusting the RBF parameters . The LM method combines the steepest descent and Gauss–Newton approaches, offering both stability and efficiency for nonlinear optimization problems.
The LM algorithm iteratively updates the parameters, starting with an initial estimate
. At each iteration
,
is updated as follows:
where
is the update increment which is obtained by solving the following system of linear equations:
where
is the residual vector representing the error between observed and predicted relative displacements,
is the residual vector evaluated at
,
is the Jacobian matrix of
which contains the partial derivatives of the residuals with respect to each parameter in
, and
is the adaptive damping factor that controls the balance between the steepest descent and Gauss–Newton methods during optimization.
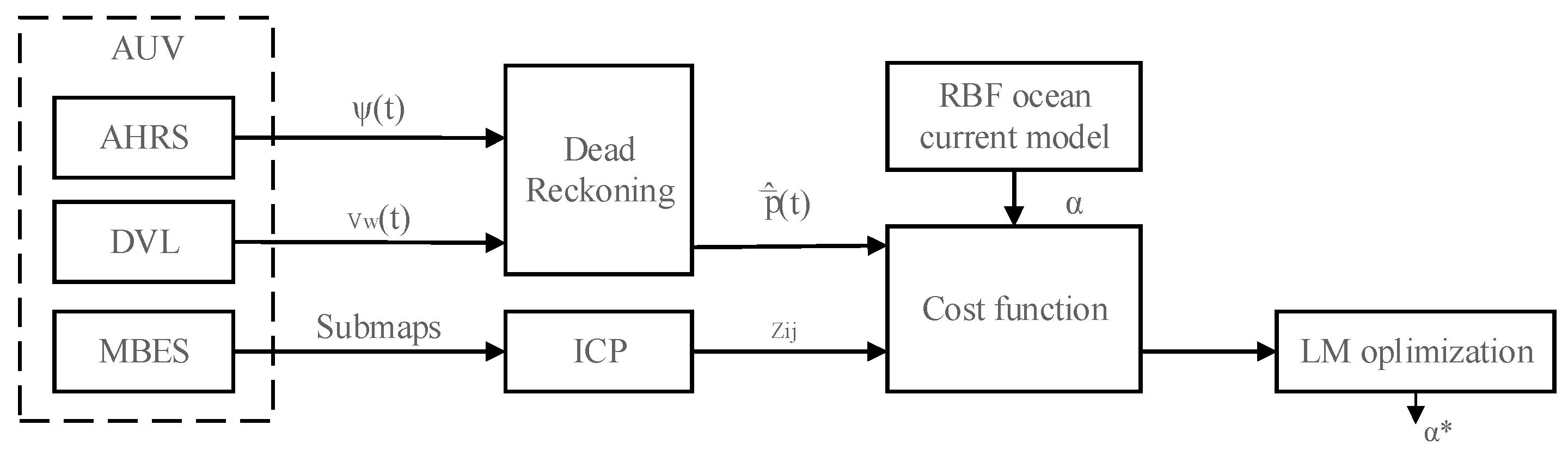
A diagram of the proposed ocean current estimation algorithm based on the RBF model is shown in
Figure 5.
4. Conclusions
This paper proposed an approach for ocean current field estimation in mid-water environments to enhance AUV navigation. A significant challenge in underwater navigation is the loss of DVL bottom-tracking when AUV operates beyond effective range from the seafloor, resulting in navigation drift due to unknown ocean currents.
The ocean current model is built upon the fundamental physical principle of incompressibility for ocean currents. By employing Gaussian RBFs as the stream potential function, the resulting velocity field is calculated as the gradient of stream function, inherently satisfying the mass conservation equation. This ensures a physical realistic and consistent representation of the current field. Our method uses MBES data to construct bathymetric submaps and the ICP algorithm as terrain-matching algorithm to obtain terrain-based relative position constraints among these submaps. These constraints are then integrated in to a nonlinear optimization problem, solved using the LM algorithm to determine the RBF parameter.
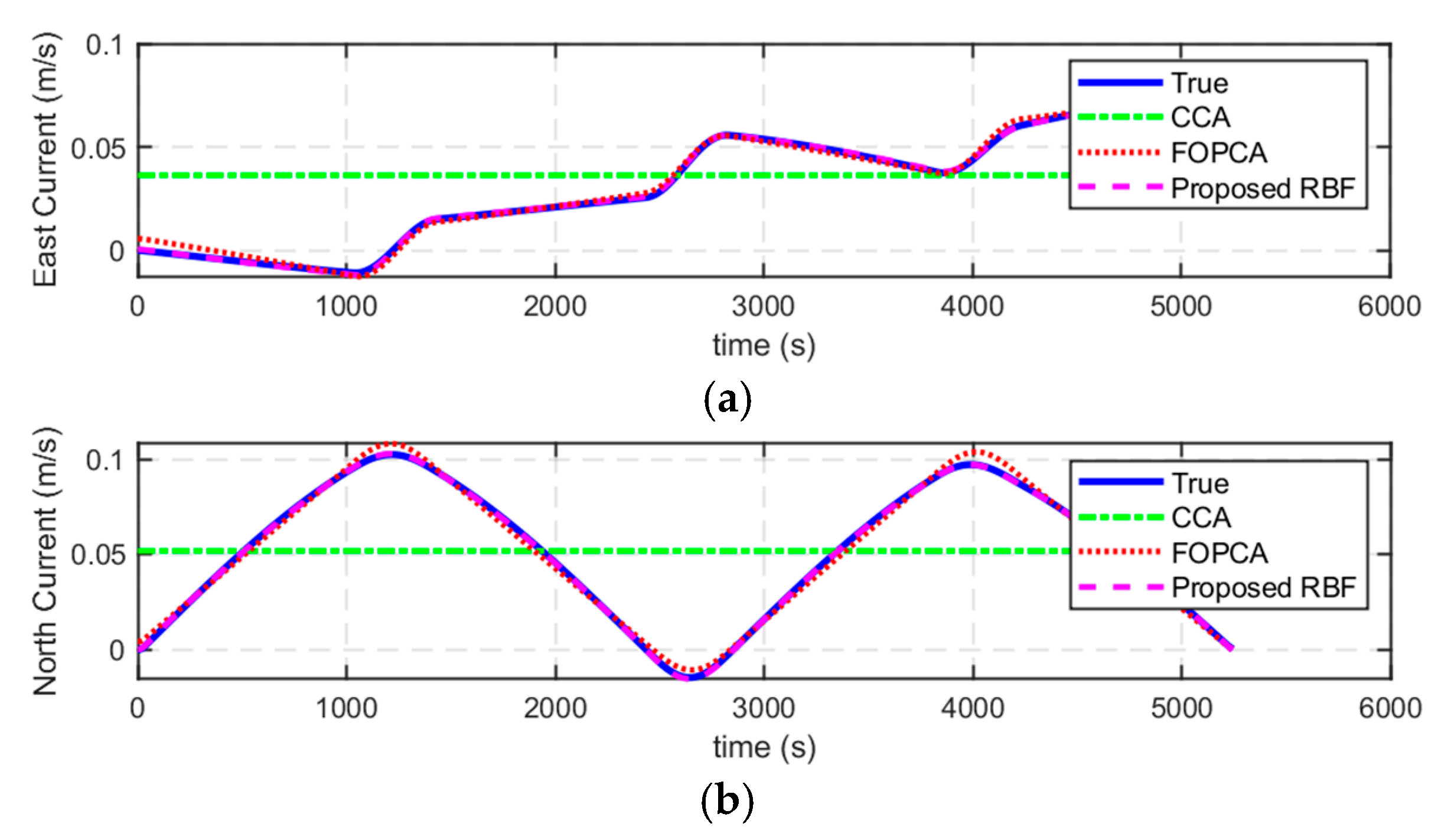
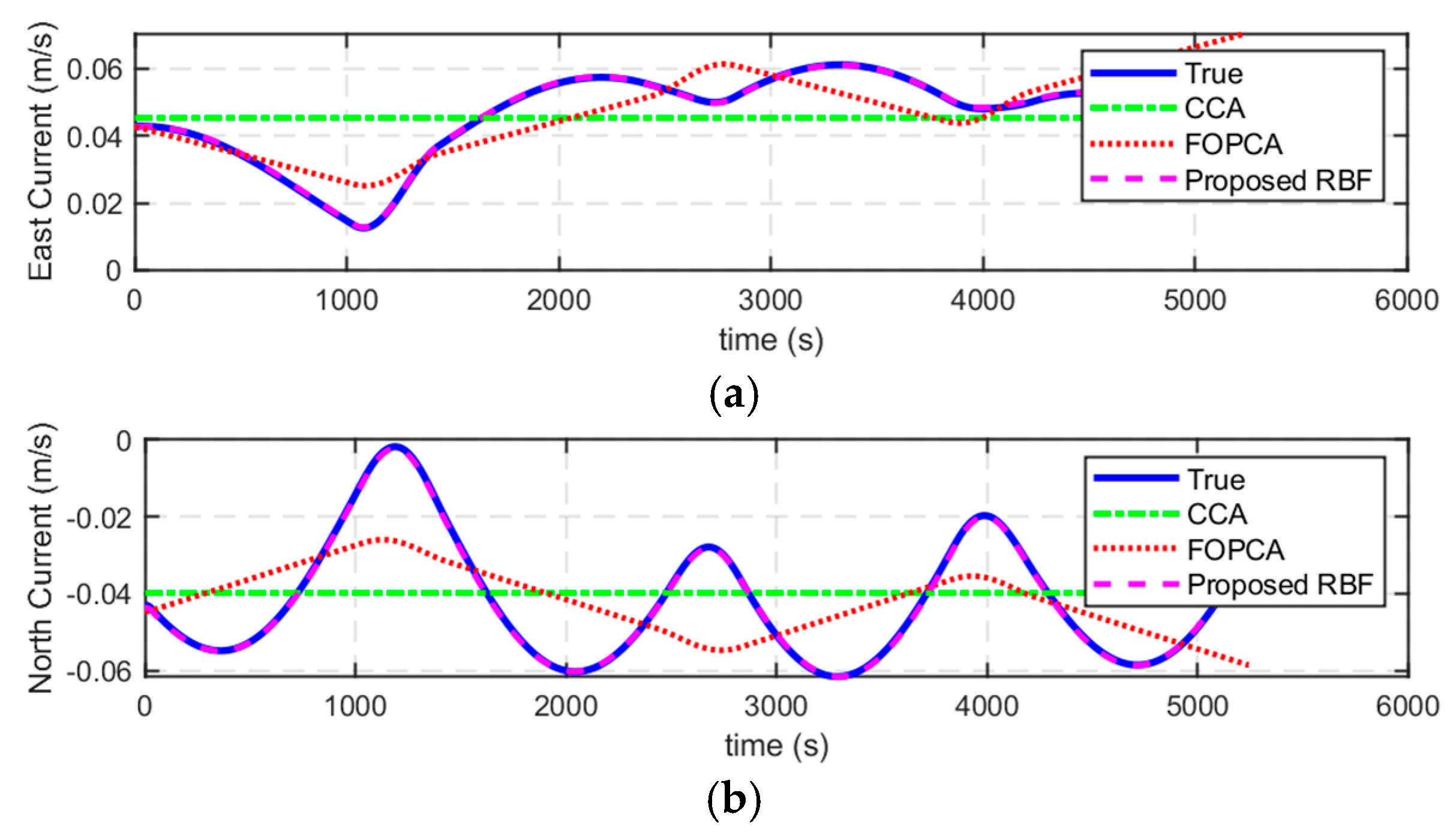
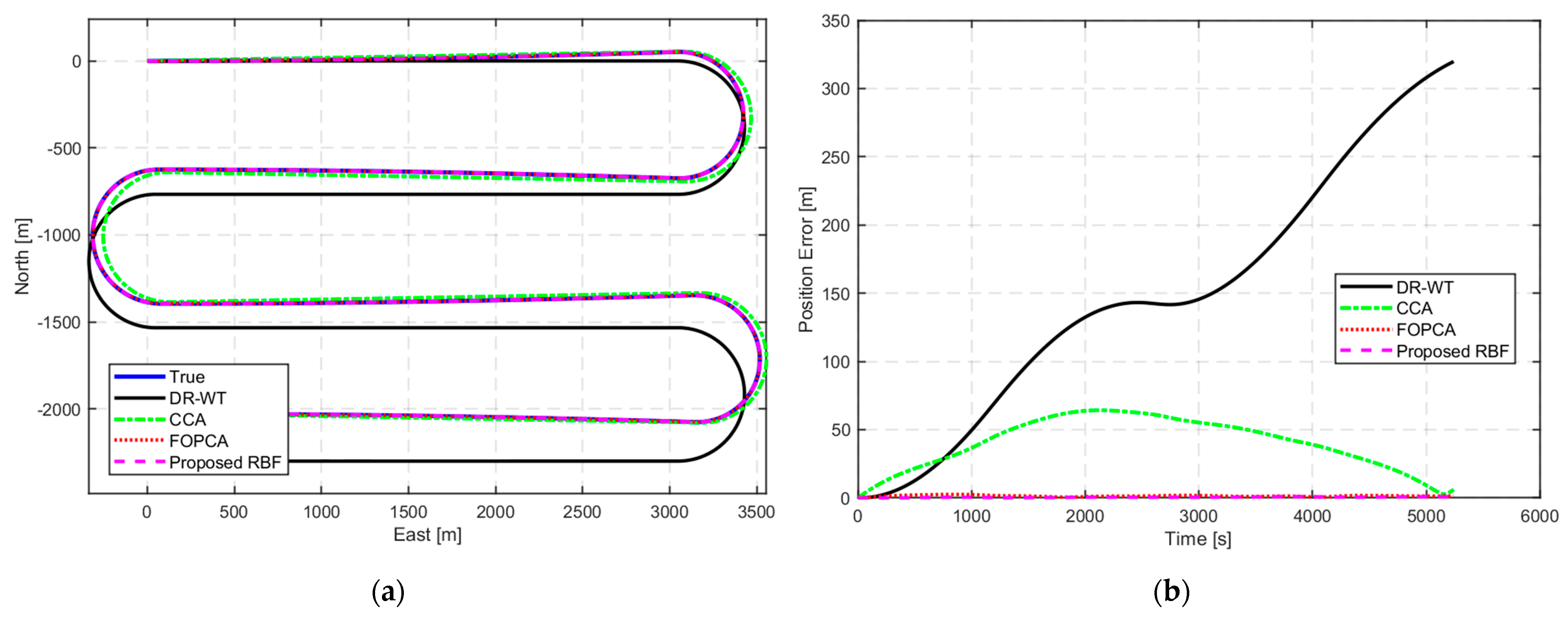
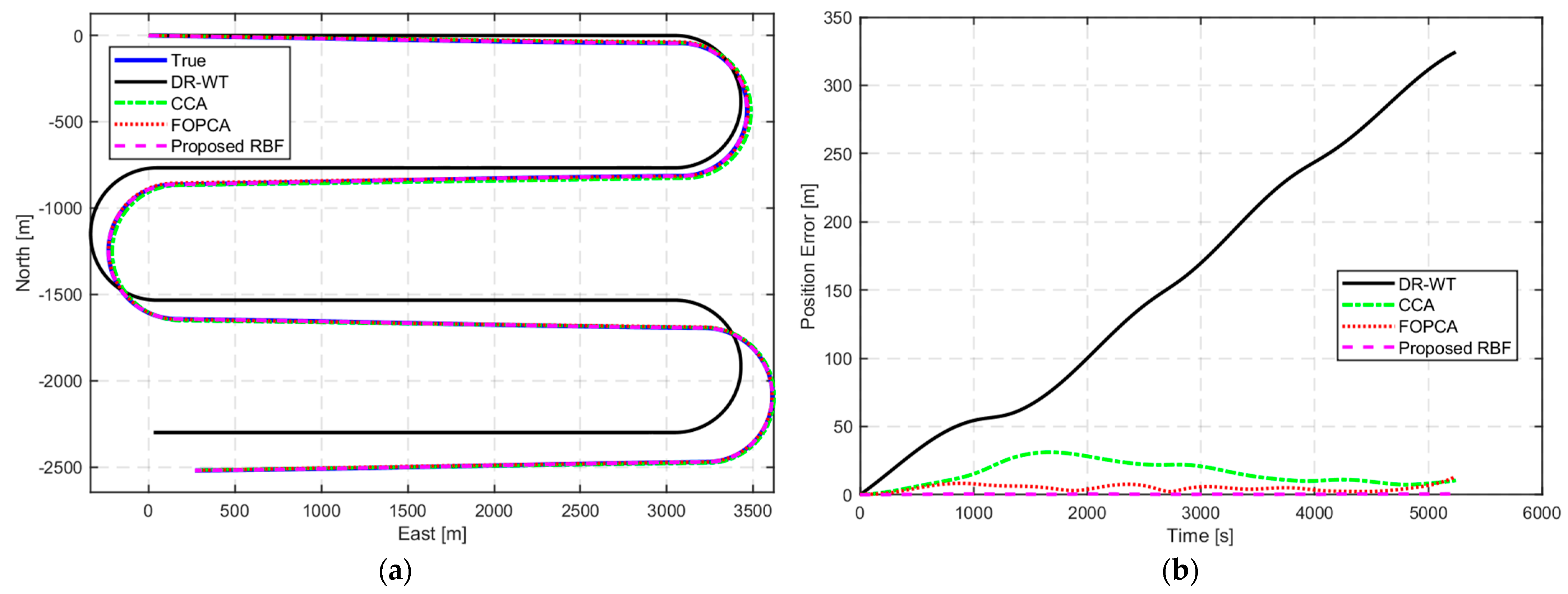
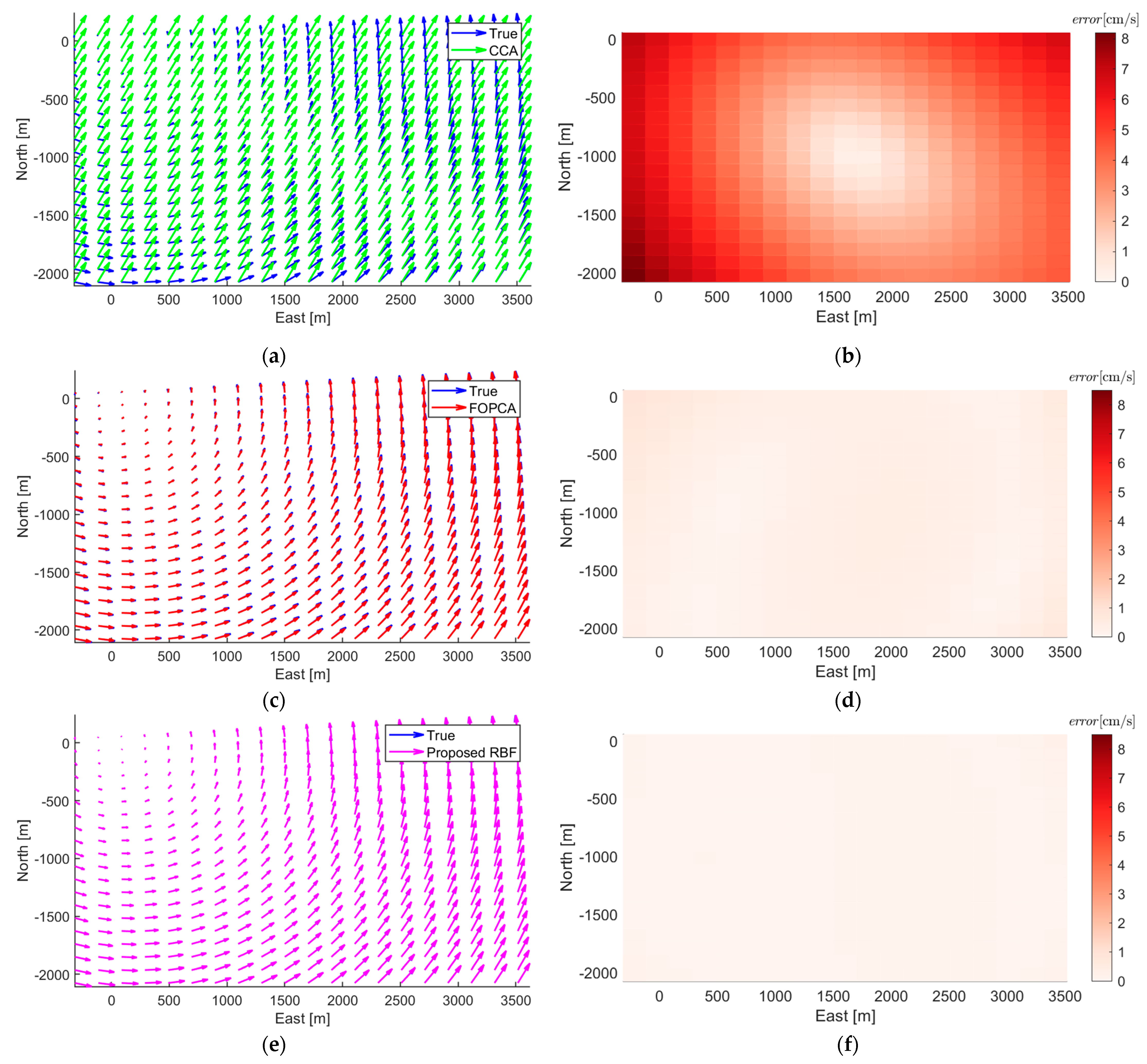
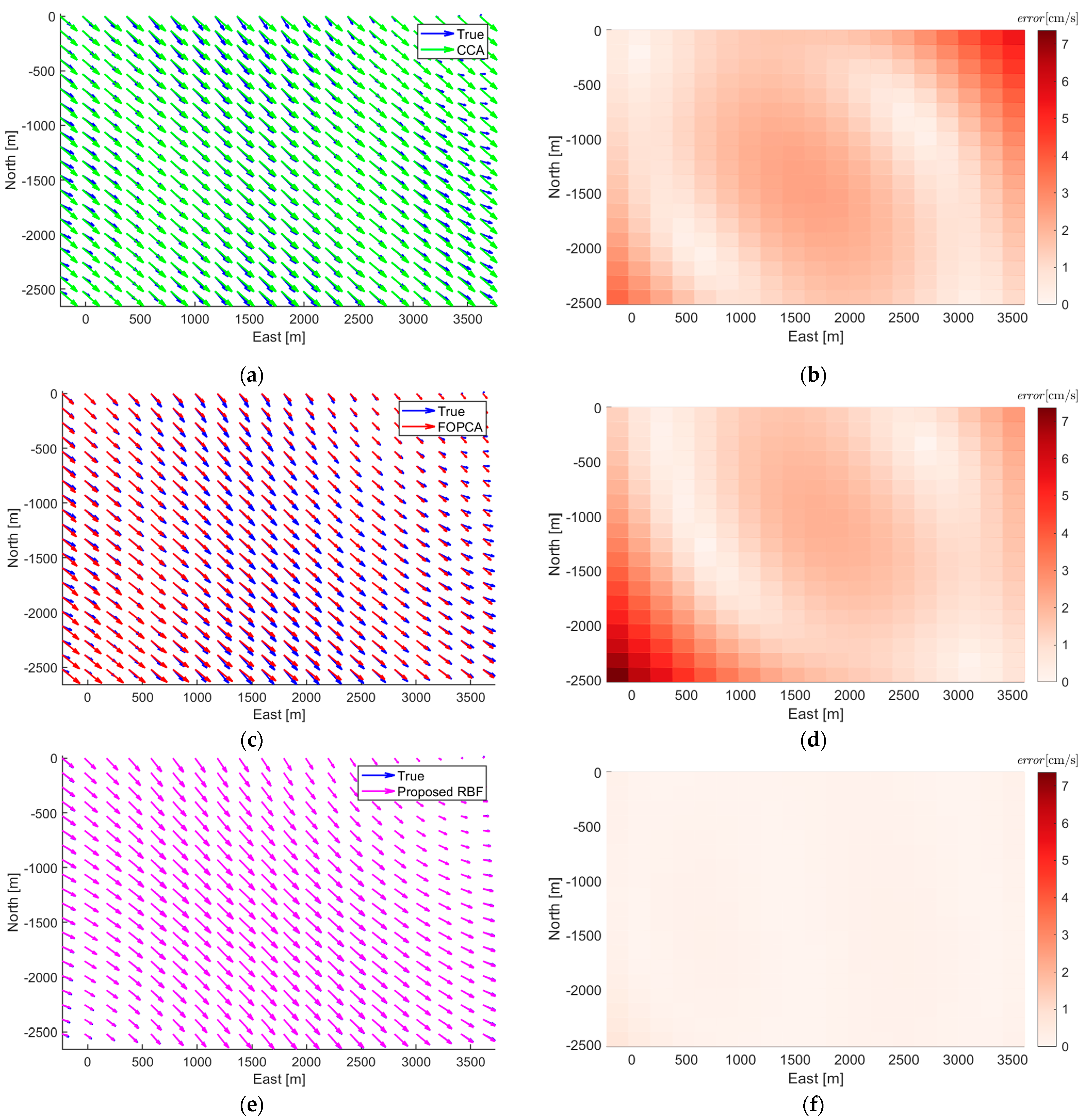
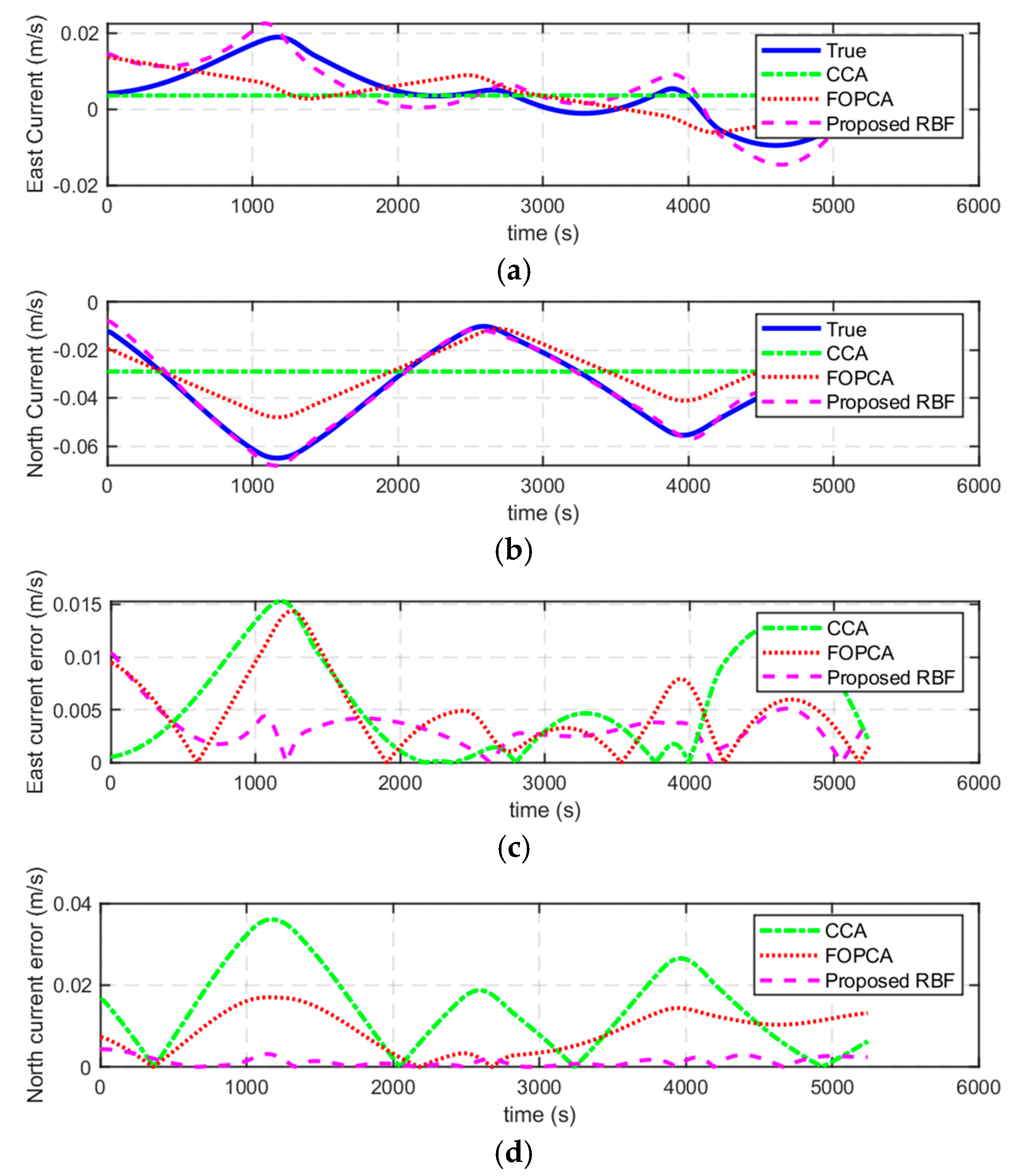
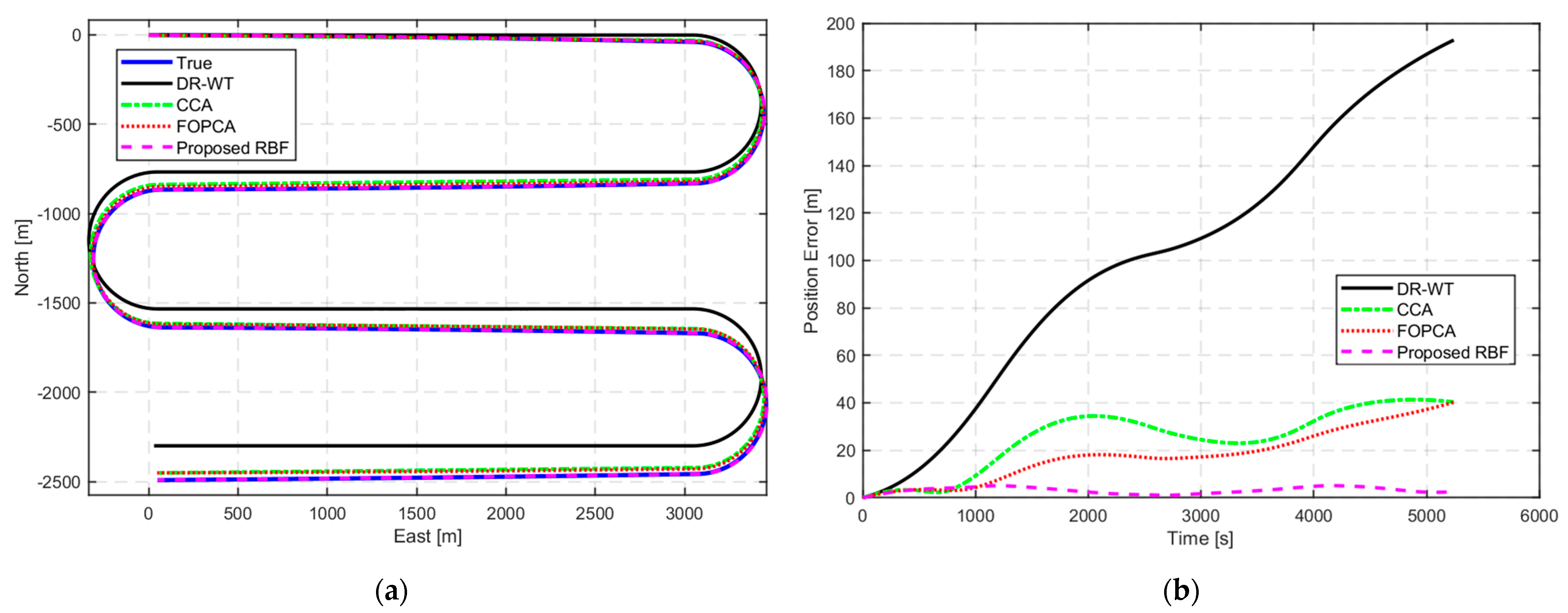
The numerical simulations and experiments validate the effectiveness of the proposed method, demonstrating high accuracy in ocean current estimation, substantial reductions in positioning errors, and significant improvements in ocean current field reconstruction. Compared with the ocean current estimation results based on simple constant current assumption and traditional first-order polynomial current assumption, the proposed RBF approach exhibits better performance in estimating ocean currents. In terms of navigation correction, the proposed RBF method substantially reduces positioning errors, showing the superiority in AUV localization during long-endurance missions in mid-water environments. Furthermore, the proposed RBF method excels in reconstructing the ocean current field, accurately capturing its complex spatial variations with minimal distributed errors.
However, the method has certain limitations that should be acknowledged. The accuracy of current field estimation depends on the quality and distribution of terrain-based relative position constraints, potentially limiting performance in regions with sparse bathymetric features. Additionally, the computational complexity increases with the number of RBF centers used to model the current field. In the future work, we will focus on developing adaptive RBF placement strategies and more efficient optimization techniques to address these limitations. We also aim to integrate complementary navigation technologies, such as acoustic positioning systems and geomagnetic measurements, to enhance robustness in diverse underwater environments.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}