
Underwater Target 3D Reconstruction via Integrated Laser Triangulation and Multispectral Photometric Stereo




Abstract
1. Introduction
- The use of a laser plane calibration method and line fitting to optimize the laser line extraction process.
- The design of a keyframe restoration method using image sequences to solve the separation of laser lines.
- The development of a weighted method to achieve efficient data fusion, leveraging the distance between points from point clouds and laser line information.
2. Related Work
2.1. Linear Laser Triangulation
2.2. Multispectral Photometric Stereo
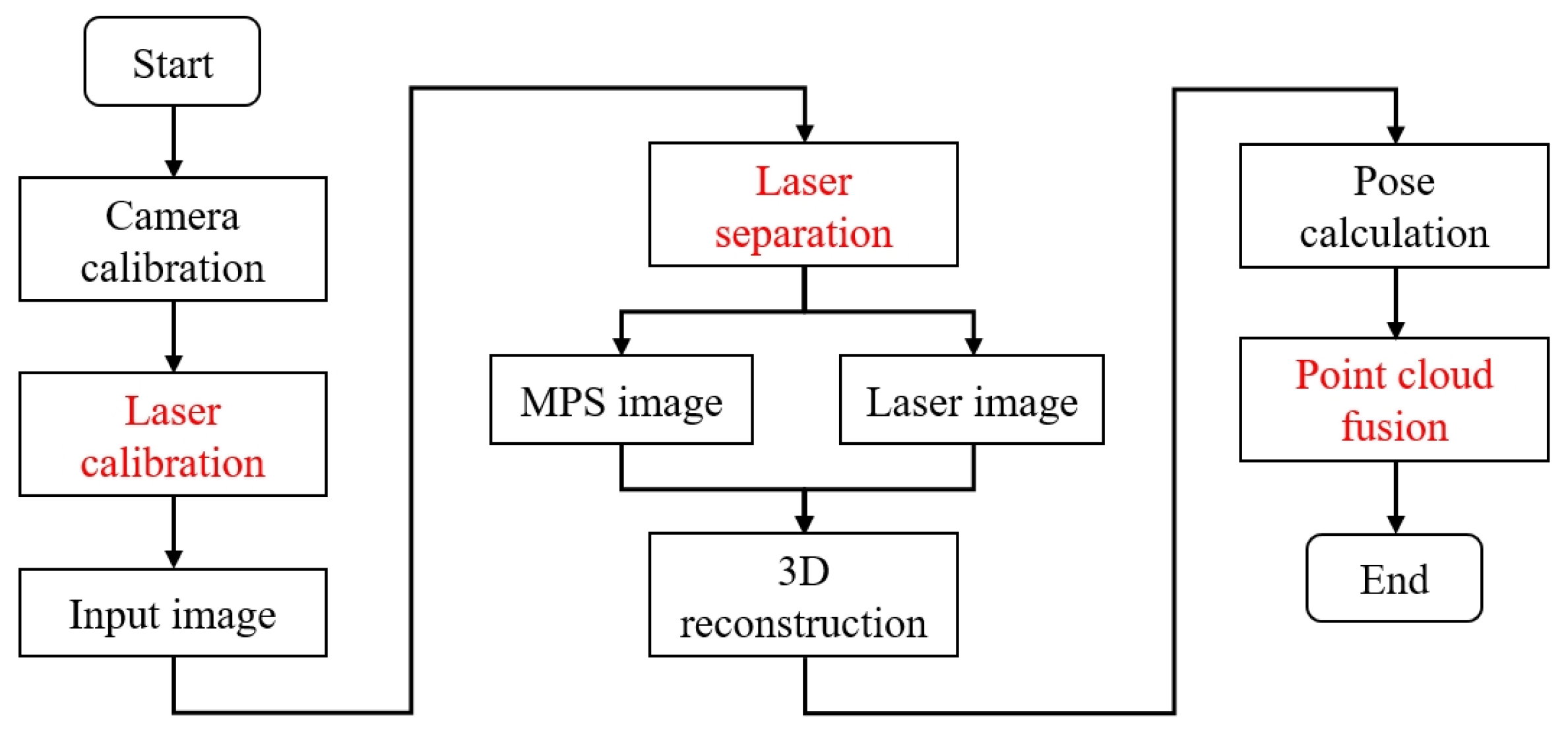
3. Theory and Method
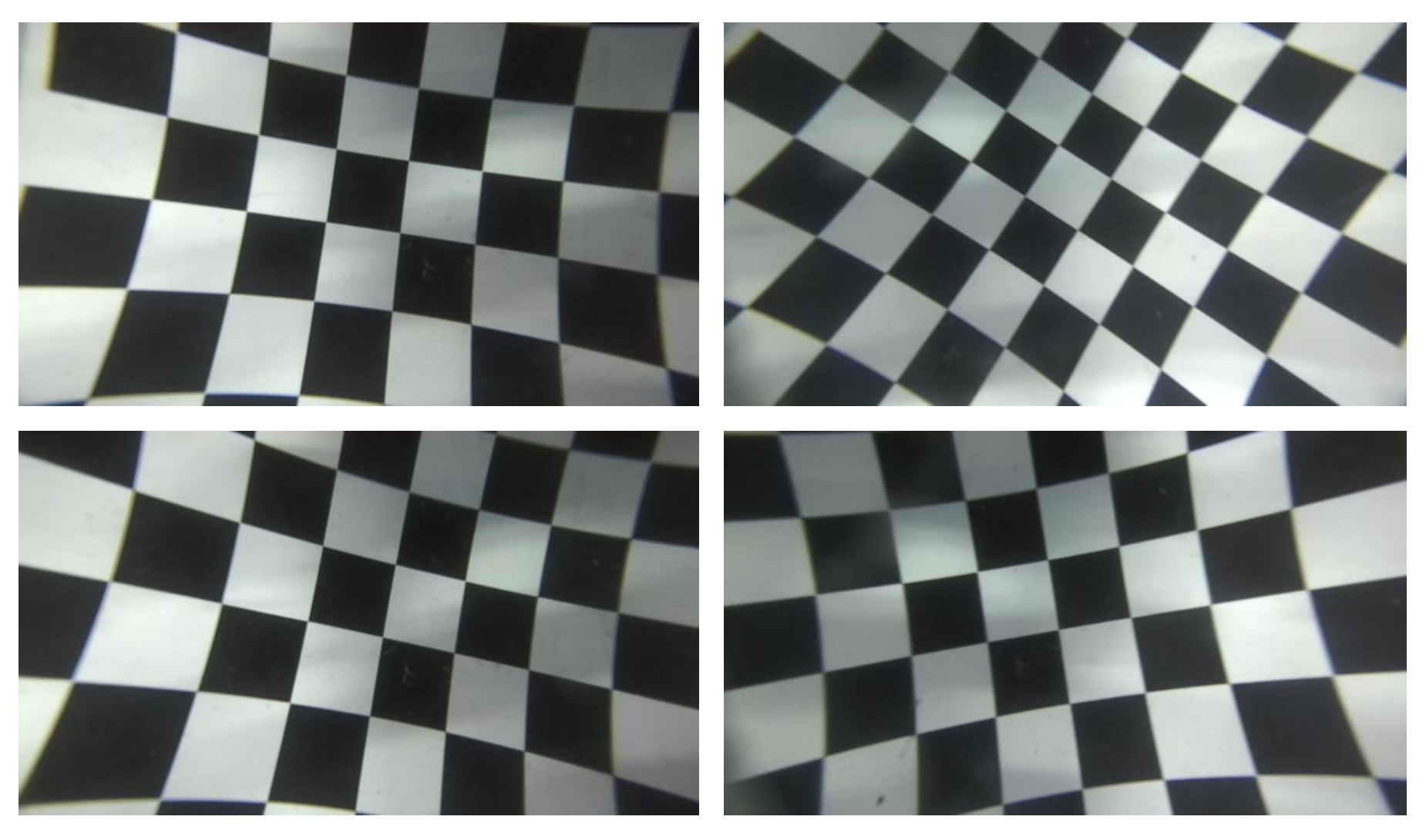
3.1. Calibration of Camera and Laser Plane
- In the world coordinate system , the origin is , which can be any point in the 3D world;
- In the image coordinate system , the origin is , located in the top left corner of the image;
- In the camera coordinate system , the origin is , located in the optical center of the camera.
3.2. Multispectral Photometric Stereo
3.3. Laser Line Separation
- Firstly, we select an image containing the laser line and the object to be measured, and then crop the original image according to the object’s size so that the image only contains the laser line and the object to be measured. Assuming that, in a given frame, the laser line is partially bent, then the frame is used as a keyframe to perform the three-channel separation. Threshold segmentation is performed on each channel, and their intersection is exploited to find the area where the pixel grayscale value is distorted.
- Next, we pick the adjacent image pairs (, ) of the previously selected keyframe image j. After separating these two frames into three channels, perform threshold segmentation to determine the areas where pixel grayscale values are distorted. We perform intersection processing on the distorted areas of images and to determine if there is an intersection. If there is an intersection, pick the frame and the frame to form a pair of images with larger intervals (, ). After separating the three channels, determine whether there is an intersection in the distorted area in this new pair. If there is an intersection once again, this process of searching for increasing large pairs from frame j is repeated until no intersection is found.
- Finally, the pixel values of the corresponding area (distortion area of the keyframe j) before image binarization are overlapped and evenly divided, then replaced with the distorted area of the keyframe j that has not been binarized, making it a new keyframe without a distortion area. The restored keyframe image is directly subtracted from the original keyframe image j in terms of pixel values to obtain the laser line image. The above steps are repeated until the laser line disappears from the object to be measured.
3.4. Mobile Reconstruction and Data Fusion
4. Experiment and Comparison
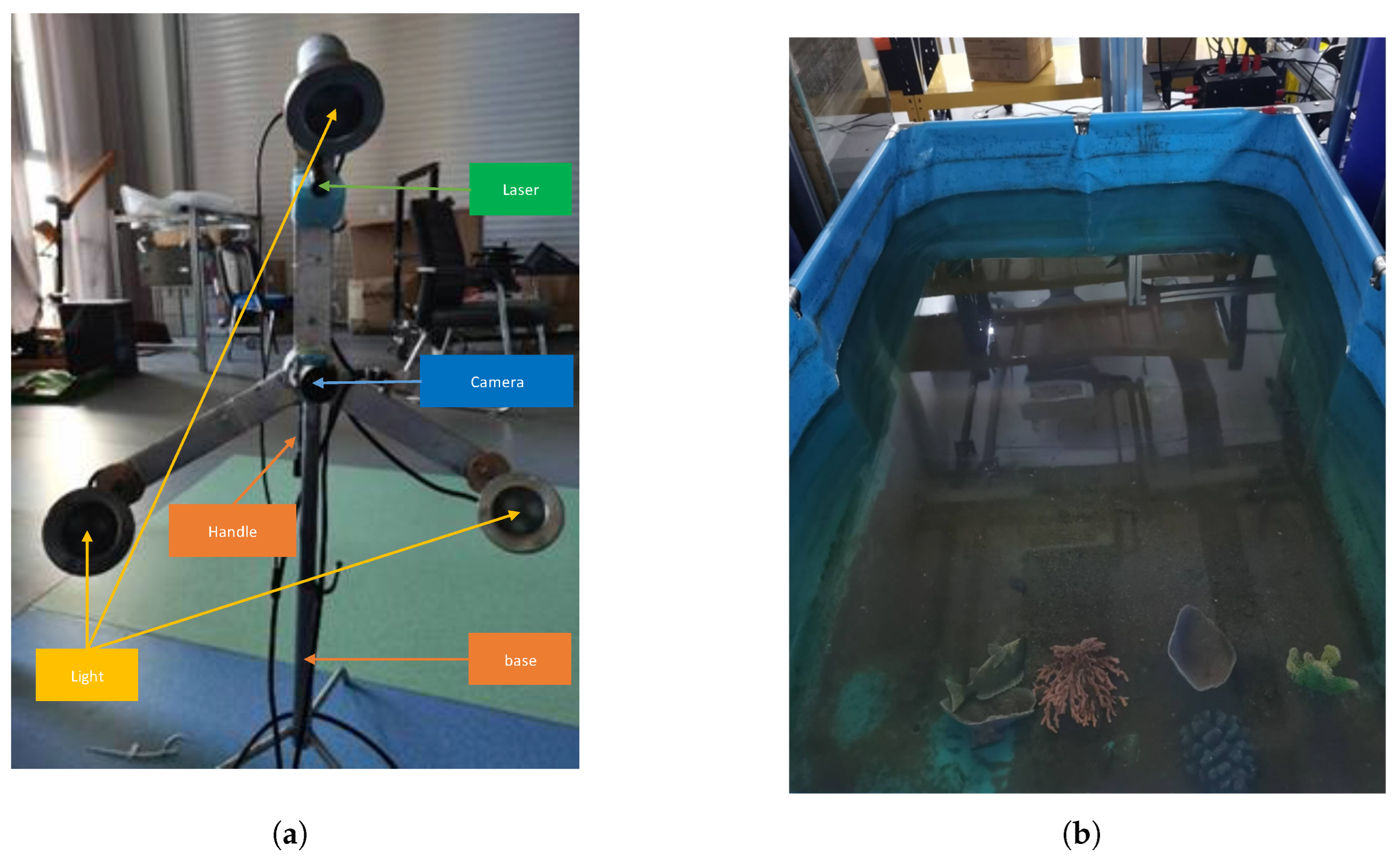
4.1. Experimental Setup
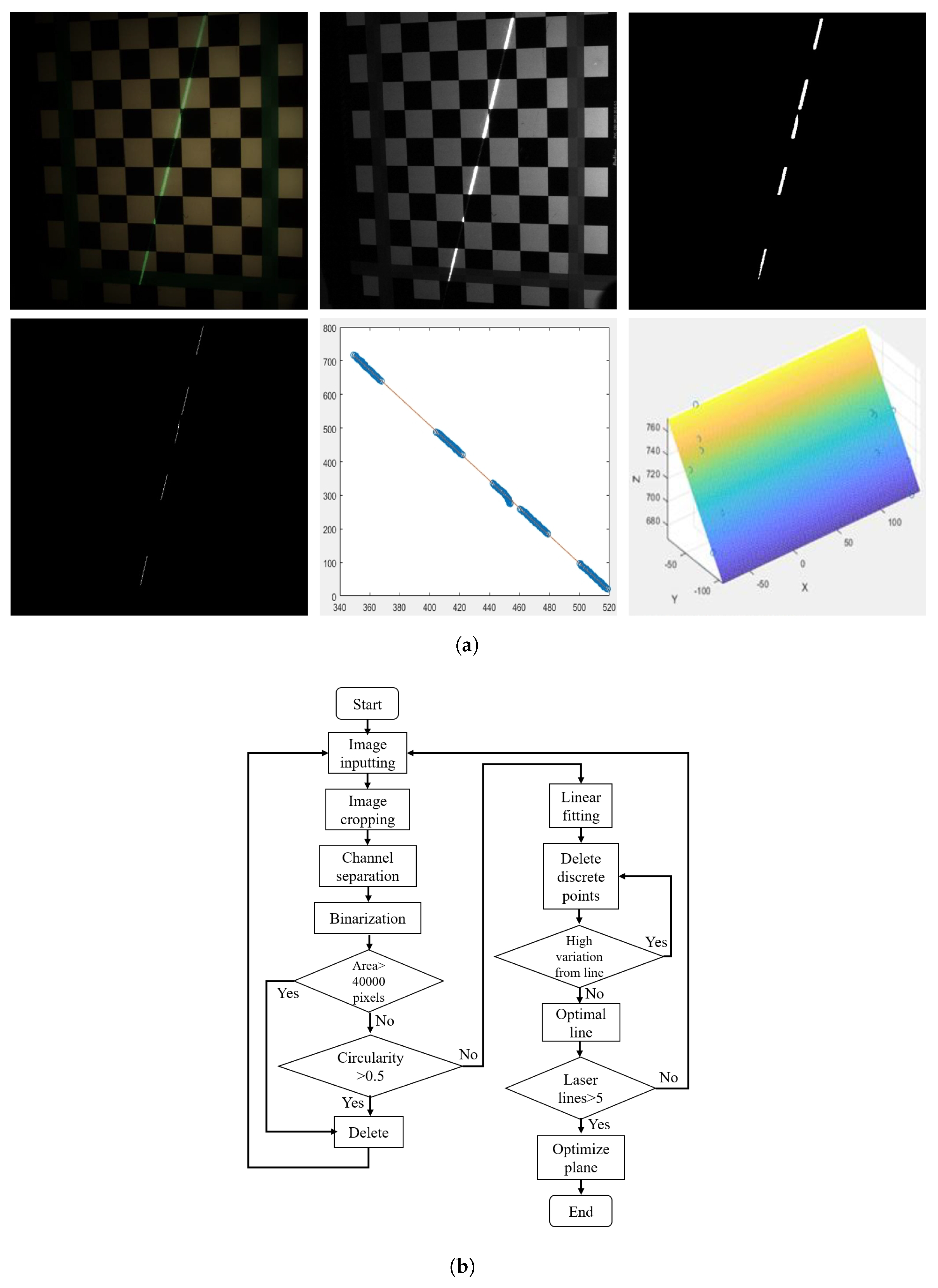
4.2. Comparison of Laser Plane Calibration Effects
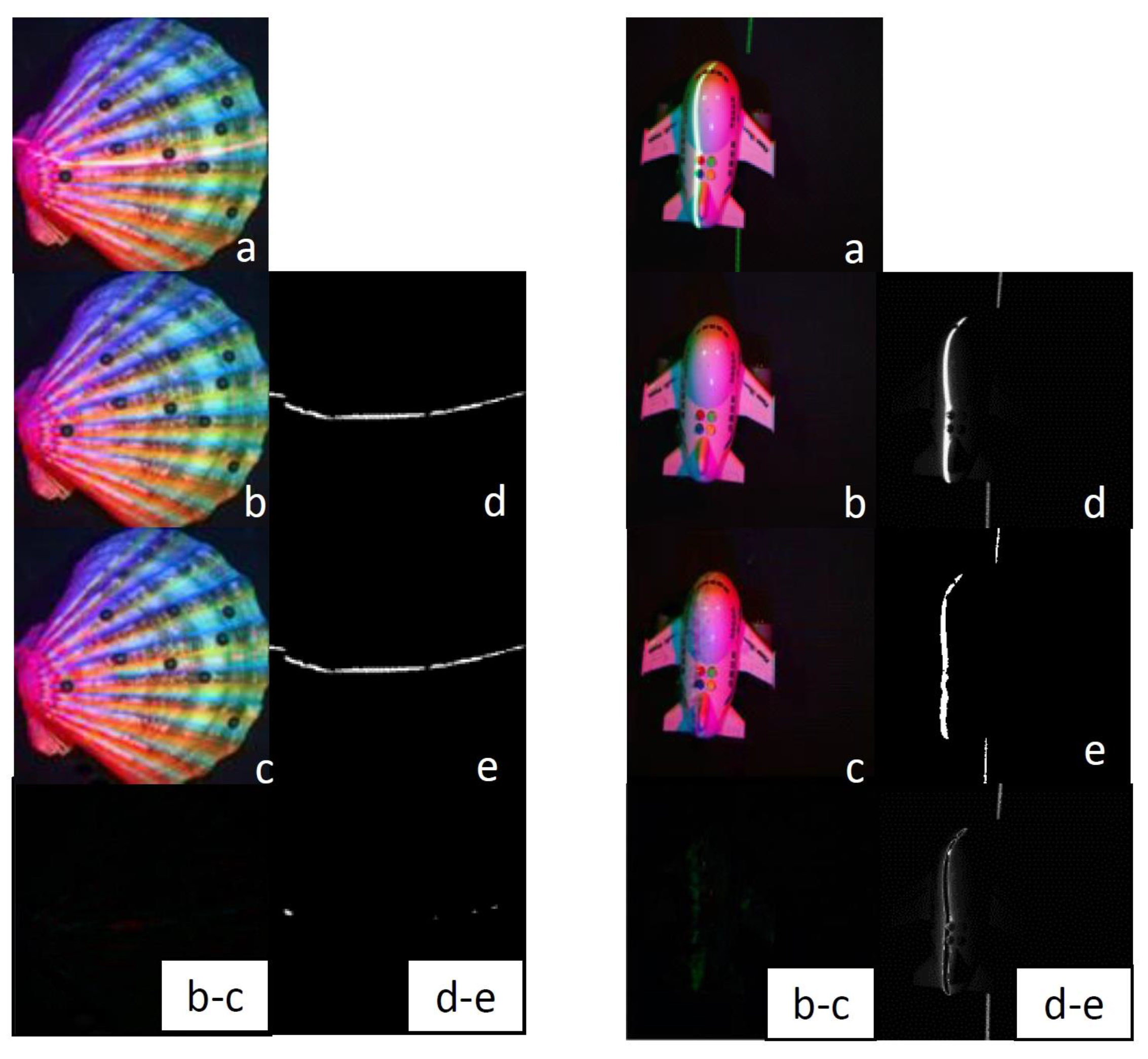
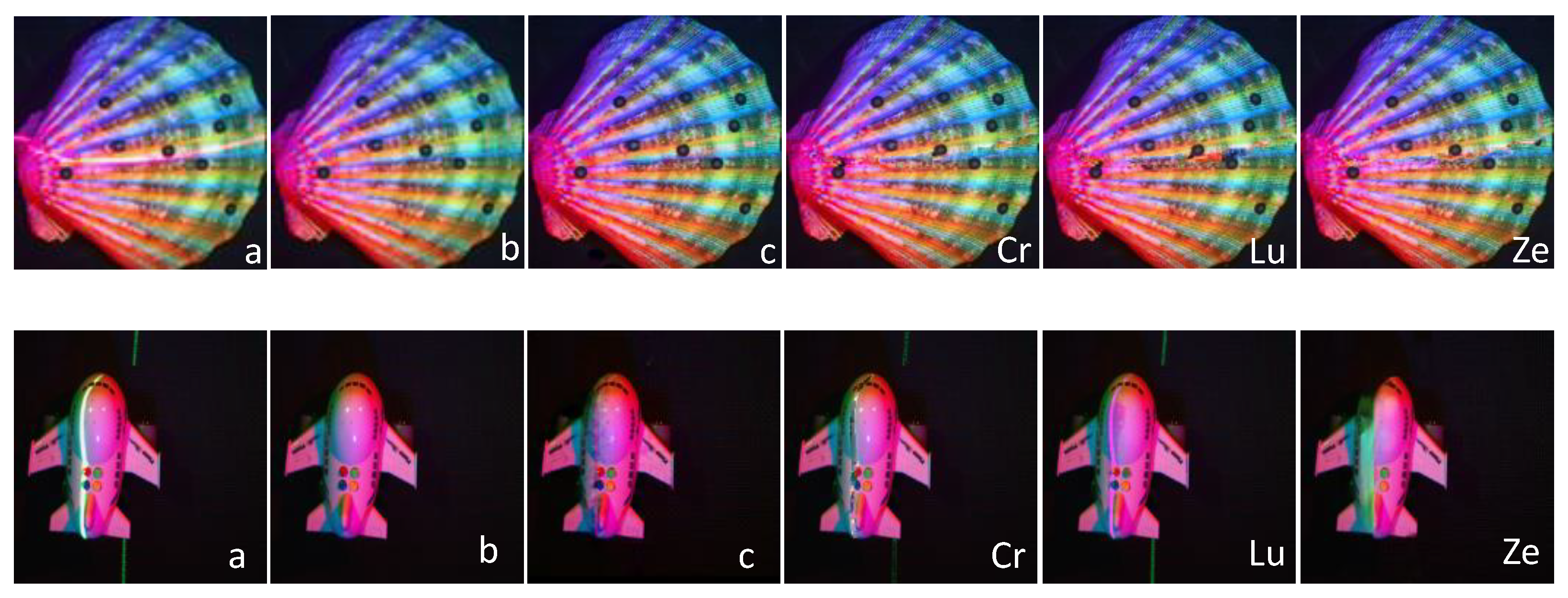
4.3. Comparison of Laser Line Separation Effects
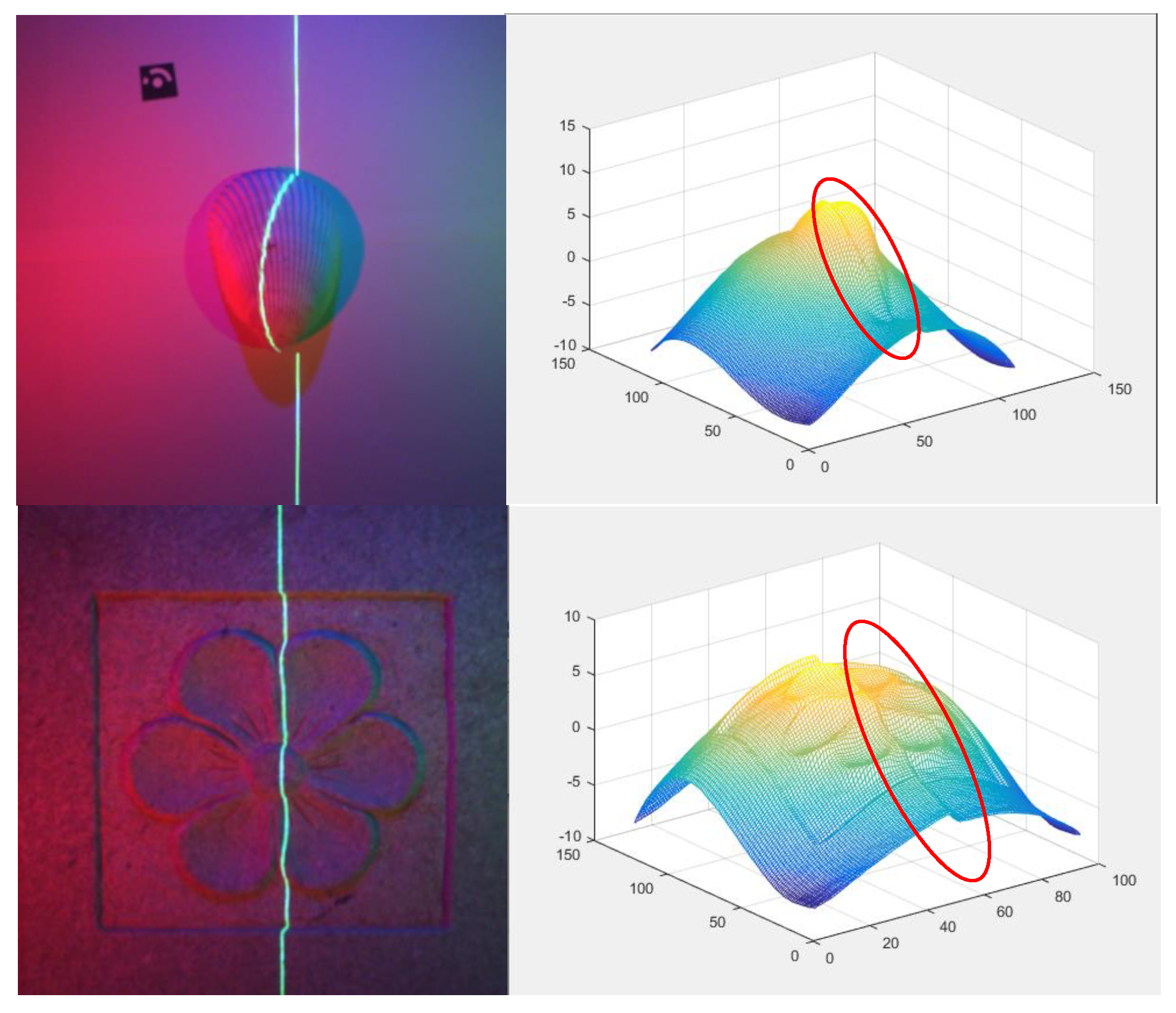
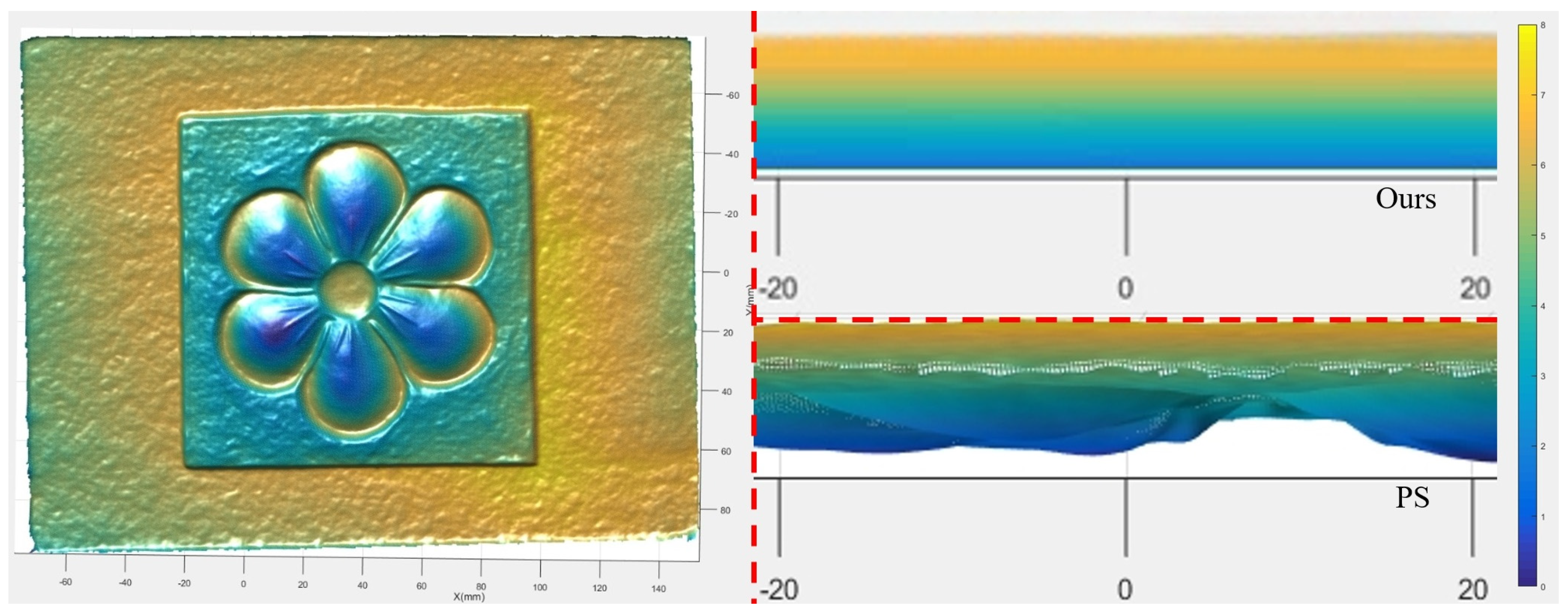
4.4. Comparison of 3D Reconstruction Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajapan, D.; Rajeshwari, P.M.; Zacharia, S. Importance of Underwater Acoustic Imaging Technologies for Oceanographic applications—A brief review. In Proceedings of the OCEANS 2022, Chennai, India, 21–24 February 2022; pp. 1–6. [Google Scholar]
- Shen, Y.; Zhao, C.; Liu, Y.; Wang, S.; Huang, F. Underwater Optical Imaging: Key Technologies and Applications Review. IEEE Access 2021, 9, 85500–85514. [Google Scholar] [CrossRef]
- Hu, K.; Wang, T.; Shen, C.; Weng, C.; Zhou, F.; Xia, M.; Weng, L. Overview of underwater 3D reconstruction technology based on optical images. J. Mar. Sci. Eng. 2023, 11, 949. [Google Scholar] [CrossRef]
- Csencsics, E.; Schlarp, J.; Glaser, T.; Wolf, T.; Schitter, G. Reducing the Speckle-Induced Measurement Uncertainty in Laser Triangulation Sensors. IEEE Trans. Instrum. Meas. 2023, 72, 7000809. [Google Scholar] [CrossRef]
- Wang, X.; Jian, Z.; Yuan, H.; Ren, M. Self-Calibrating Sparse Far-Field Photometric Stereo With Collocated Light. IEEE Trans. Instrum. Meas. 2022, 71, 5001310. [Google Scholar] [CrossRef]
- Yang, Y.; Rigall, E.; Fan, H.; Dong, J. Point Light Measurement and Calibration for Photometric Stereo. IEEE Trans. Instrum. Meas. 2024, 73, 5001011. [Google Scholar] [CrossRef]
- Chakrabarti, A.; Sunkavalli, K. Single-image RGB Photometric Stereo With Spatially-varying Albedo. In Proceedings of the IEEE Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016. [Google Scholar]
- Yu, B.; Ren, J.; Han, J.; Wang, F.; Liang, J.; Shi, B. EventPS: Real-Time Photometric Stereo Using an Event Camera. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 16–22 June 2024; pp. 9602–9611. [Google Scholar]
- Fan, J.; Jing, F.; Fang, Z.; Liang, Z. A simple calibration method of structured light plane parameters for welding robots. In Proceedings of the 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016. [Google Scholar]
- Xie, Z.; Wang, X.; Chi, S. Simultaneous calibration of the intrinsic and extrinsic parameters of structured-light sensors. Opt. Lasers Eng. 2014, 58, 9–18. [Google Scholar] [CrossRef]
- Zou, X.; He, H.; Wu, Y.; Chen, Y.; Xu, M. Automatic 3D point cloud registration algorithm based on triangle similarity ratio consistency. IET Image Process. 2020, 14, 3314–3323. [Google Scholar] [CrossRef]
- Dong, M.; Xu, L.; Wang, J.; Sun, P.; Zhu, L. Variable-weighted grayscale centroiding and accuracy evaluating. Adv. Mech. Eng. 2013, 5, 428608. [Google Scholar] [CrossRef]
- Qi, L.; Zhang, Y.; Zhang, X.; Wang, S.; Xie, F. Statistical behavior analysis and precision optimization for the laser stripe center detector based on Steger’s algorithm. Opt. Express 2013, 21, 13442–13449. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, H.; Li, L.; Zheng, S.; Fu, J.; Tian, Q. Line laser center extraction method based on the improved thinning method. Electron. Meas. Technol. 2023, 46, 84–89. [Google Scholar]
- Huang, Y.; Kang, W.; Lu, Z. Improved Structured Light Centerline Extraction Algorithm Based on Unilateral Tracing. Photonics 2024, 11, 723. [Google Scholar] [CrossRef]
- Zhao, X.; Yu, D.; Shi, H. Laser Stripe Extraction for 3D Reconstruction of Complex Internal Surfaces. IEEE Access 2025, 13, 5562–5574. [Google Scholar] [CrossRef]
- Criminisi, A.; Pérez, P.; Toyama, K. Region filling and object removal by exemplar-based image inpainting. IEEE Trans. Image Process. 2004, 13, 1200–1212. [Google Scholar] [CrossRef] [PubMed]
- Lu, C.; Feng, J.; Lin, Z.; Yan, S. Exact low tubal rank tensor recovery from Gaussian measurements. arXiv 2018, arXiv:1806.02511. [Google Scholar]
- Zeng, Y.; Lin, Z.; Yang, J.; Zhang, J.; Shechtman, E.; Lu, H. High-resolution image inpainting with iterative confidence feedback and guided upsampling. In Proceedings of the Computer Vision—ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XIX 16. pp. 1–17. [Google Scholar]
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Hong, Y.; Ren, G.; Liu, E. Non-iterative method for camera calibration. Opt. Express 2015, 23, 23992–24003. [Google Scholar] [CrossRef]
- Niu, Z.; Zhang, Z.; Wang, Y.; Liu, K.; Deng, X. Calibration method for the relative orientation between the rotation axis and a camera using constrained global optimization. Meas. Sci. Technol. 2017, 28, 055001. [Google Scholar] [CrossRef]
- Zheng, F.; Kong, B. Calibration of linear structured light system by planar checkerboard. In Proceedings of the IEEE International Conference on Information Acquisition, Hefei, China, 21–25 June 2004. [Google Scholar]
- Chu, C.W.; Hwang, S.; Jung, S.K. Calibration-free approach to 3D reconstruction using light stripe projections on a cube frame. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canda, 28 May–1 June 2001. [Google Scholar]
- Chi, S.; Xie, Z.; Chen, W. A Laser Line Auto-Scanning System for Underwater 3D Reconstruction. Sensors 2016, 16, 1534. [Google Scholar] [CrossRef]
- Lin, H.; Zhang, H.; Li, Y.; Huo, J.; Deng, H.; Zhang, H. Method of 3D reconstruction of underwater concrete by laser line scanning. Opt. Lasers Eng. 2024, 183, 108468. [Google Scholar] [CrossRef]
- Jiang, S.; Sun, F.; Gu, Z.; Zheng, H.; Nan, W.; Yu, Z. Underwater 3D reconstruction based on laser line scanning. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Li, J.; Zhou, Q.; Li, X.; Chen, R.; Ni, K. An Improved Low-Noise Processing Methodology Combined with PCL for Industry Inspection Based on Laser Line Scanner. Sensors 2019, 19, 3398. [Google Scholar] [CrossRef]
- Feng, Y.; Tang, J.; Su, B.; Su, Q.; Zhou, Z. Point Cloud Registration Algorithm Based on the Grey Wolf Optimizer. IEEE Access 2020, 8, 143375–143382. [Google Scholar] [CrossRef]
- Liang, L.; Ming, Y.; Chunxiang, W.; Bing, W. Robust Point Set Registration Using Signature Quadratic Form Distance. IEEE Trans. Cybern. 2018, 50, 2097–2109. [Google Scholar]
- Zhao, H. High-Precision 3D Reconstruction for Small-to-Medium-Sized Objects Utilizing Line-Structured Light Scanning: A Review. Remote. Sens. 2021, 13, 4457. [Google Scholar]
- Hua, L.; Lu, Y.; Deng, J.; Shi, Z.; Shen, D. 3D reconstruction of concrete defects using optical laser triangulation and modified spacetime analysis. Autom. Constr. 2022, 142, 104469. [Google Scholar] [CrossRef]
- Liu, L.; Cai, H.; Tian, M.; Liu, D.; Cheng, Y.; Yin, W. Research on 3D reconstruction technology based on laser measurement. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 297. [Google Scholar] [CrossRef]
- Huang, H.; Liu, G.; Xiao, C.; Deng, L.; Gong, Y.; Song, T.; Qin, F. Spatial quadric calibration method for multi-line laser based on diffractive optical element. AIP Adv. 2024, 14, 035017. [Google Scholar] [CrossRef]
- Hong, H.; Lee, B.H. Probabilistic normal distributions transform representation for accurate 3D point cloud registration. In Proceedings of the 2017 IEEE/RSJ international Conference on intelligent robots and systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3333–3338. [Google Scholar]
- Yuan, Y.; Wu, Y.; Lei, J.; Hu, C.; Gong, M.; Fan, X.; Ma, W.; Miao, Q. Learning compact transformation based on dual quaternion for point cloud registration. IEEE Trans. Instrum. Meas. 2024, 73, 2506312. [Google Scholar] [CrossRef]
- Zhao, F.; Huang, H.; Hu, W. An optimized hierarchical point cloud registration algorithm. Multimed. Syst. 2025, 31, 14. [Google Scholar] [CrossRef]
- Narasimhan, S.; Nayar, S. Structured light methods for underwater imaging: Light stripe scanning and photometric stereo. In Proceedings of the OCEANS 2005, Washington, DC, USA, 18–23 September 2005; pp. 2610–2617. [Google Scholar]
- Tsiotsios, C.; Angelopoulou, M.E.; Kim, T.K.; Davison, A.J. Backscatter Compensated Photometric Stereo with 3 Sources. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Jiao, H.; Luo, Y.; Wang, N.; Qi, L.; Lei, H. Underwater multi-spectral photometric stereo reconstruction from a single RGBD image. In Proceedings of the 2016 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Jeju, Republic of Korea, 13–16 December 2017. [Google Scholar]
- Fan, H.; Qi, L.; Chen, C.; Rao, Y.; Kong, L.; Dong, J.; Yu, H. Underwater Optical 3-D Reconstruction of Photometric Stereo Considering Light Refraction and Attenuation. IEEE J. Ocean. Eng. 2022, 47, 46–58. [Google Scholar] [CrossRef]
- Zhou, M.; Ding, Y.; Ji, Y.; Young, S.S.; Ye, J. Shape and Reflectance Reconstruction Using Concentric Multi-Spectral Light Field. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 1594–1605. [Google Scholar] [CrossRef]
- Yakun, J.; Lin, Q.; Huiyu, Z.; Junyu, D.; Liang, L. Demultiplexing Colored Images for Multispectral Photometric Stereo via Deep Neural Networks. IEEE Access 2018, 6, 30804–30818. [Google Scholar]
- Hamaen, K.; Miyazaki, D.; Hiura, S. Multispectral Photometric Stereo Using Intrinsic Image Decomposition. In Proceedings of the IW-FCV 2020, Tokyo, Japan, 20–22 February 2020. [Google Scholar]
- Guo, H.; Okura, F.; Shi, B.; Funatomi, T.; Mukaigawa, Y.; Matsushita, Y. Multispectral Photometric Stereo for Spatially-Varying Spectral Reflectances. Int. J. Comput. Vis. 2022, 130, 2166–2183. [Google Scholar] [CrossRef]
- Miyazaki, D.; Uegomori, K. Example-Based Multispectral Photometric Stereo for Multi-Colored Surfaces. J. Imaging 2022, 8, 107. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Zhu, H.; Dong, J.; Ju, Y.; Zhou, H. Three-Dimensional Reconstruction with a Laser Line Based on Image In-Painting and Multi-Spectral Photometric Stereo. Sensors 2021, 21, 2131. [Google Scholar] [CrossRef]
- Pan, L.; Baráth, D.; Pollefeys, M.; Schönberger, J.L. Global structure-from-motion revisited. In Proceedings of the European Conference on Computer Vision (ECCV), Milan, Italy, 29 September–4 October 2024; pp. 58–77. [Google Scholar]
- Fan, H.; Rao, Y.; Rigall, E.; Qi, L.; Wang, Z.; Dong, J. Near-field photometric stereo using a ring-light imaging device. Signal Process. Image Commun. 2022, 102, 116605. [Google Scholar] [CrossRef]
- Liu, H.; Wu, X.; Yan, N.; Yuan, S.; Zhang, X. A novel image registration-based dynamic photometric stereo method for online defect detection in aluminum alloy castings. Digit. Signal Process. 2023, 141, 104165. [Google Scholar] [CrossRef]
- Niu, J.; Zhong, S.; Zhou, Y. IMU-Aided Event-based Stereo Visual Odometry. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 19–23 May 2024. [Google Scholar]
- Cho, H.; Kang, J.Y.; Yoon, K.J. Temporal Event Stereo via Joint Learning with Stereoscopic Flow. In Proceedings of the European Conference on Computer Vision (ECCV), Paris, France, 26–27 March 2025. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Grayscale Centroid | Steger | Improved Thinning [14] | Unilateral Tracing [15] | LBDM [16] | Ours | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Error | RSME | MAE | RSME | MAE | RSME | MAE | RSME | MAE | RSME | MAE | RSME | MAE |
| 35 × 9 × 70 | 0.528 | 0.301 | 0.472 | 0.208 | 0.220 | 0.298 | 0.220 | 0.168 | 0.177 | 0.146 | 0.105 | 0.139 |
| 35 × 9 × 60 | 0.486 | 0.304 | 0.444 | 0.218 | 0.483 | 0.301 | 0.210 | 0.170 | 0.166 | 0.153 | 0.100 | 0.140 |
| 35 × 9 × 50 | 0.446 | 0.310 | 0.408 | 0.290 | 0.449 | 0.300 | 0.200 | 0.185 | 0.153 | 0.149 | 0.095 | 0.145 |
| 35 × 9 × 40 | 0.402 | 0.305 | 0.375 | 0.286 | 0.413 | 0.296 | 0.194 | 0.188 | 0.140 | 0.146 | 0.090 | 0.142 |
| 35 × 9 × 30 | 0.362 | 0.308 | 0.338 | 0.288 | 0.380 | 0.296 | 0.188 | 0.186 | 0.126 | 0.143 | 0.086 | 0.144 |
| Methods | Grayscale Centroid | Steger | Improved Thinning [14] | Unilateral Tracing [15] | LBDM [16] | Ours |
|---|---|---|---|---|---|---|
| time (s) | 0.689 | 6.459 | 3.972 | 0.167 | 5.220 | 0.175 |
| Methods | MAE () (Pixels) | RMSE (Pixels) | ||
|---|---|---|---|---|
| Shell | Airplane Model | Shell | Airplane Model | |
| Cr | 0.0752 | 0.9937 | 0.0917 | 1.2124 |
| Lu | 0.0776 | 1.2463 | 0.0970 | 1.5199 |
| Ze | 0.0760 | 0.9733 | 0.0911 | 1.1872 |
| c (Ours) | 0.0491 | 0.7031 | 0.0608 | 0.9006 |
| Methods | Shell1 | Shell2 | Conch1 | Conch2 | Conch3 |
|---|---|---|---|---|---|
| Liu | 0.78 mm | 0.68 mm | 3.44 mm | 5.12 mm | 4.81 mm |
| Yu | 0.37 mm | 0.32 mm | 1.86 mm | 2.54 mm | 2.00 mm |
| Ours | 0.34 mm | 0.29 mm | 1.72 mm | 2.06 mm | 1.90 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Liu, Y.; Rigall, E.; Yin, Y.; Zhang, S.; Dong, J. Underwater Target 3D Reconstruction via Integrated Laser Triangulation and Multispectral Photometric Stereo. J. Mar. Sci. Eng. 2025, 13, 840. https://doi.org/10.3390/jmse13050840
Yang Y, Liu Y, Rigall E, Yin Y, Zhang S, Dong J. Underwater Target 3D Reconstruction via Integrated Laser Triangulation and Multispectral Photometric Stereo. Journal of Marine Science and Engineering. 2025; 13(5):840. https://doi.org/10.3390/jmse13050840
Chicago/Turabian StyleYang, Yang, Yimei Liu, Eric Rigall, Yifan Yin, Shu Zhang, and Junyu Dong. 2025. "Underwater Target 3D Reconstruction via Integrated Laser Triangulation and Multispectral Photometric Stereo" Journal of Marine Science and Engineering 13, no. 5: 840. https://doi.org/10.3390/jmse13050840
APA StyleYang, Y., Liu, Y., Rigall, E., Yin, Y., Zhang, S., & Dong, J. (2025). Underwater Target 3D Reconstruction via Integrated Laser Triangulation and Multispectral Photometric Stereo. Journal of Marine Science and Engineering, 13(5), 840. https://doi.org/10.3390/jmse13050840