
Research on Sea Ice and Local Ice Load Monitoring System for Polar Cargo Vessels


Abstract
:1. Introduction
2. Sea Ice Monitoring
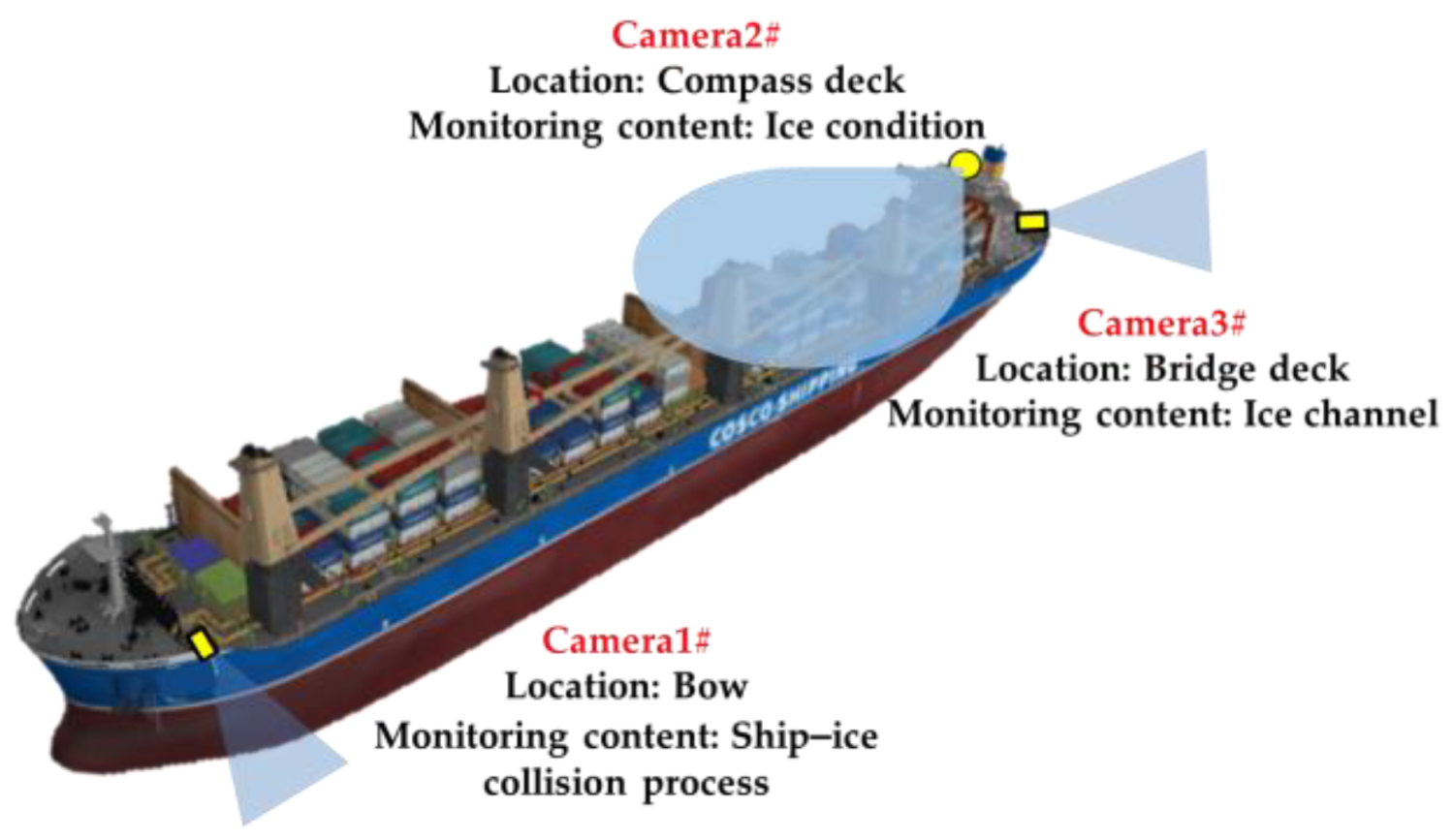
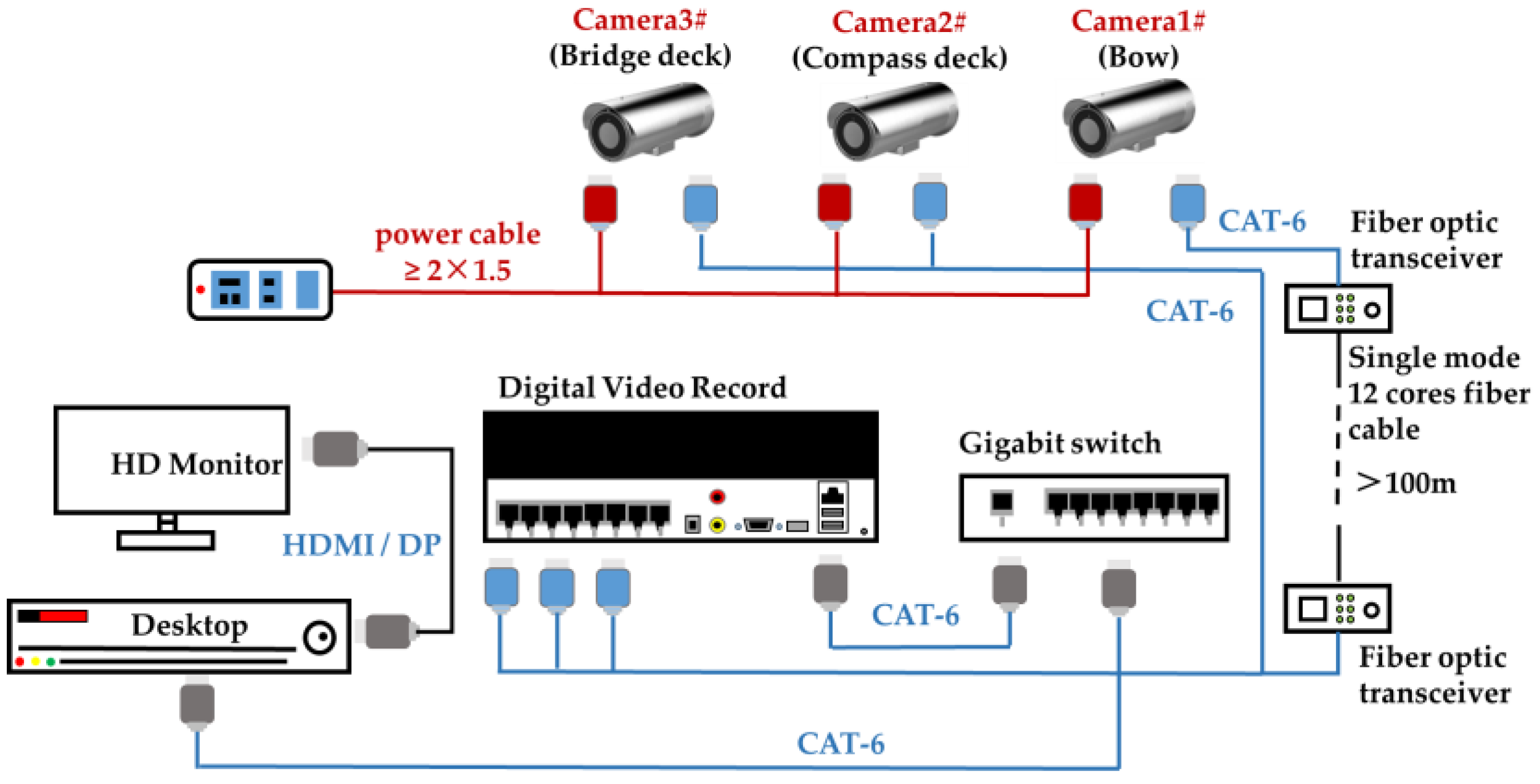
2.1. Camera-Based Sea Ice Image Monitoring
2.2. Sea Ice Concentration Identification
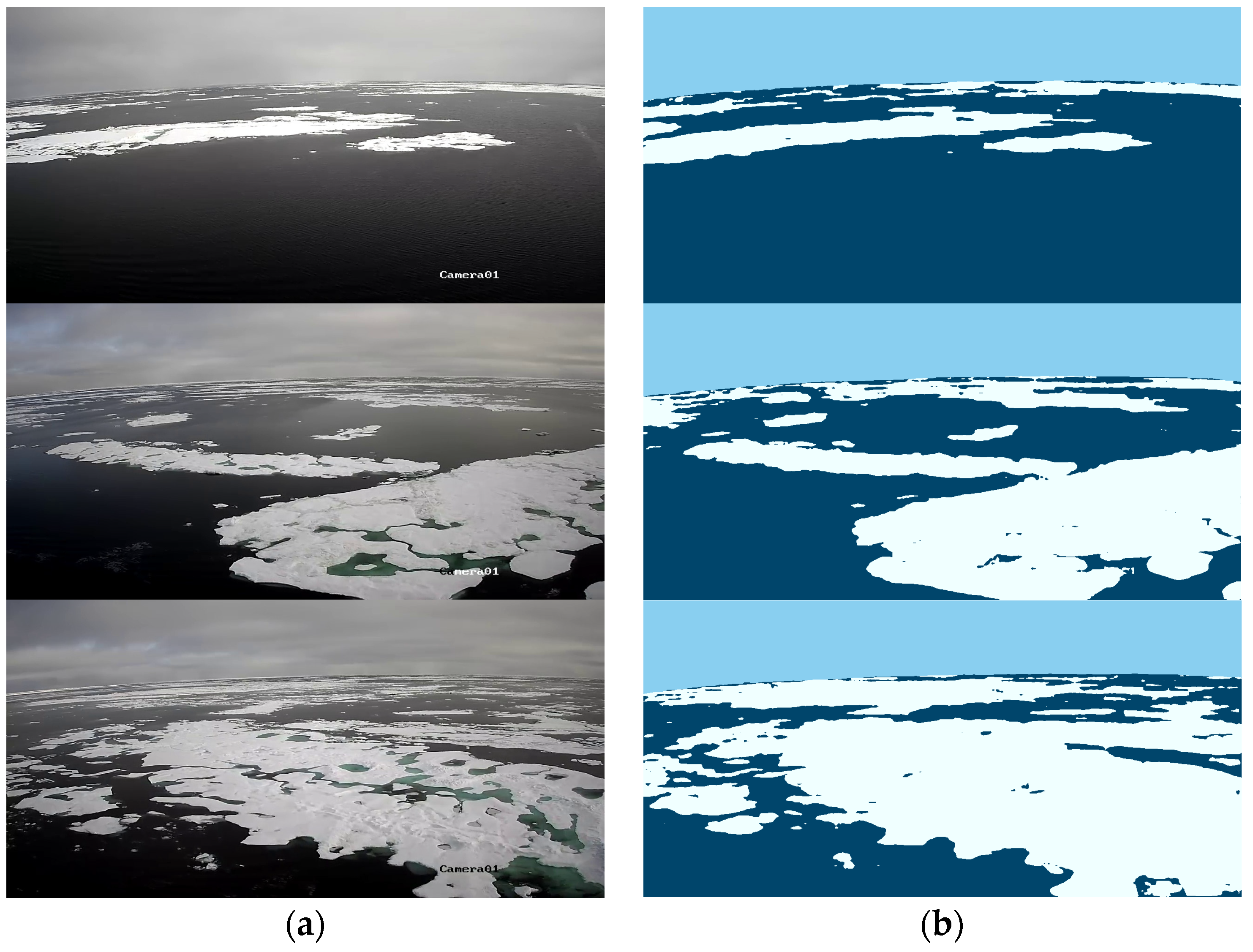
2.2.1. Semantic Segmentation Model of Sea Ice
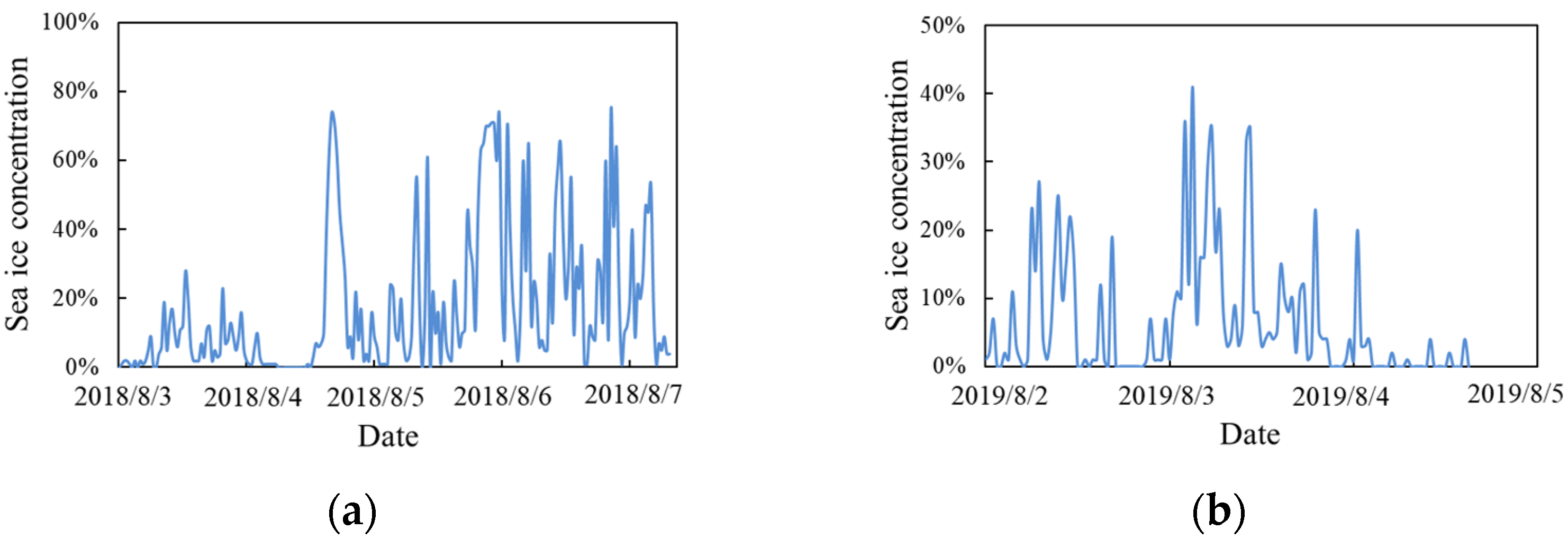
2.2.2. Results and Analysis of Sea Ice Concentration Identification
3. Local Ice Load Monitoring
3.1. Methodology
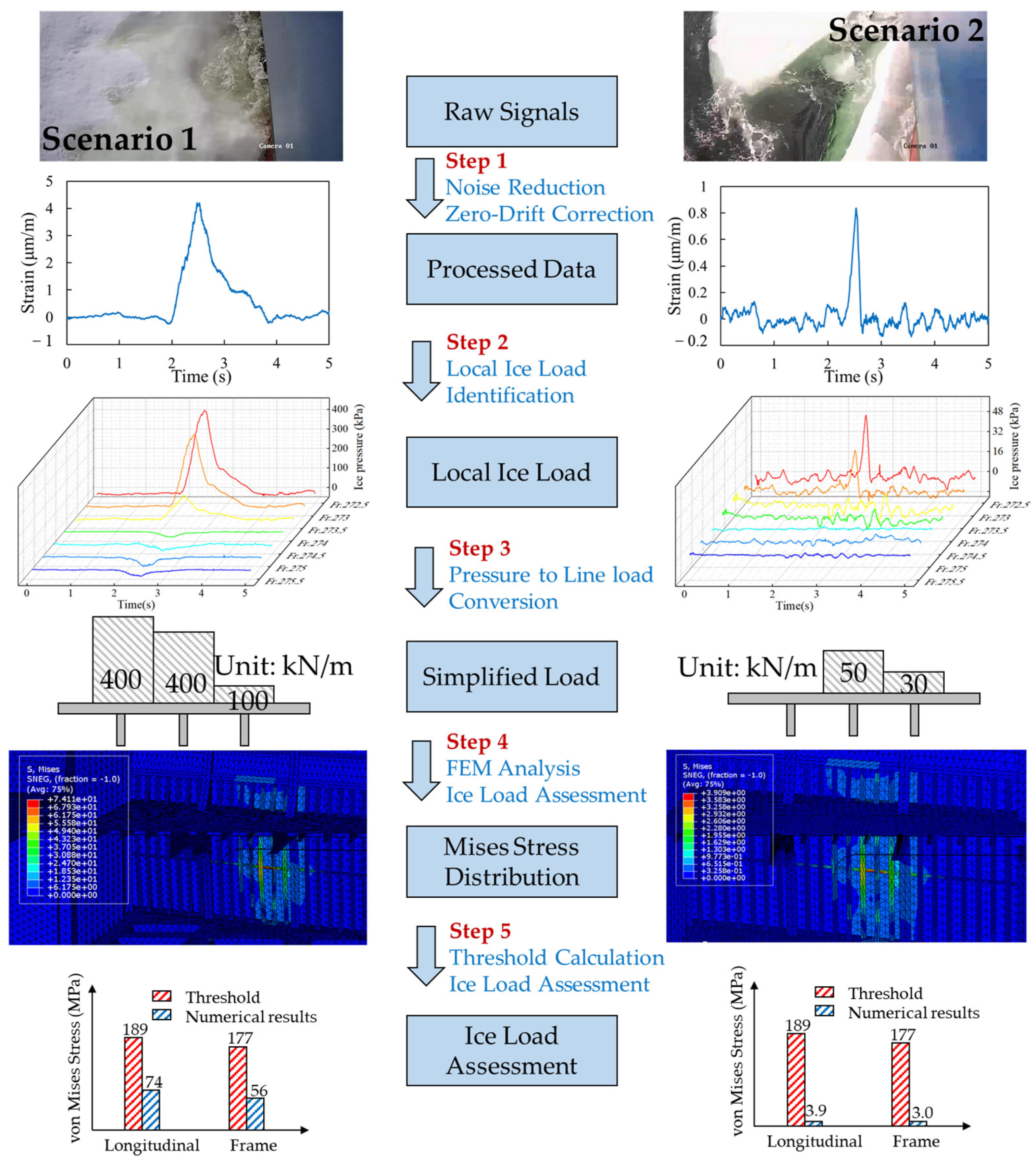
3.1.1. The Research Framework for Ice Load Acquisition and Assessment
3.1.2. The Design of the Ice Load Monitoring Scheme
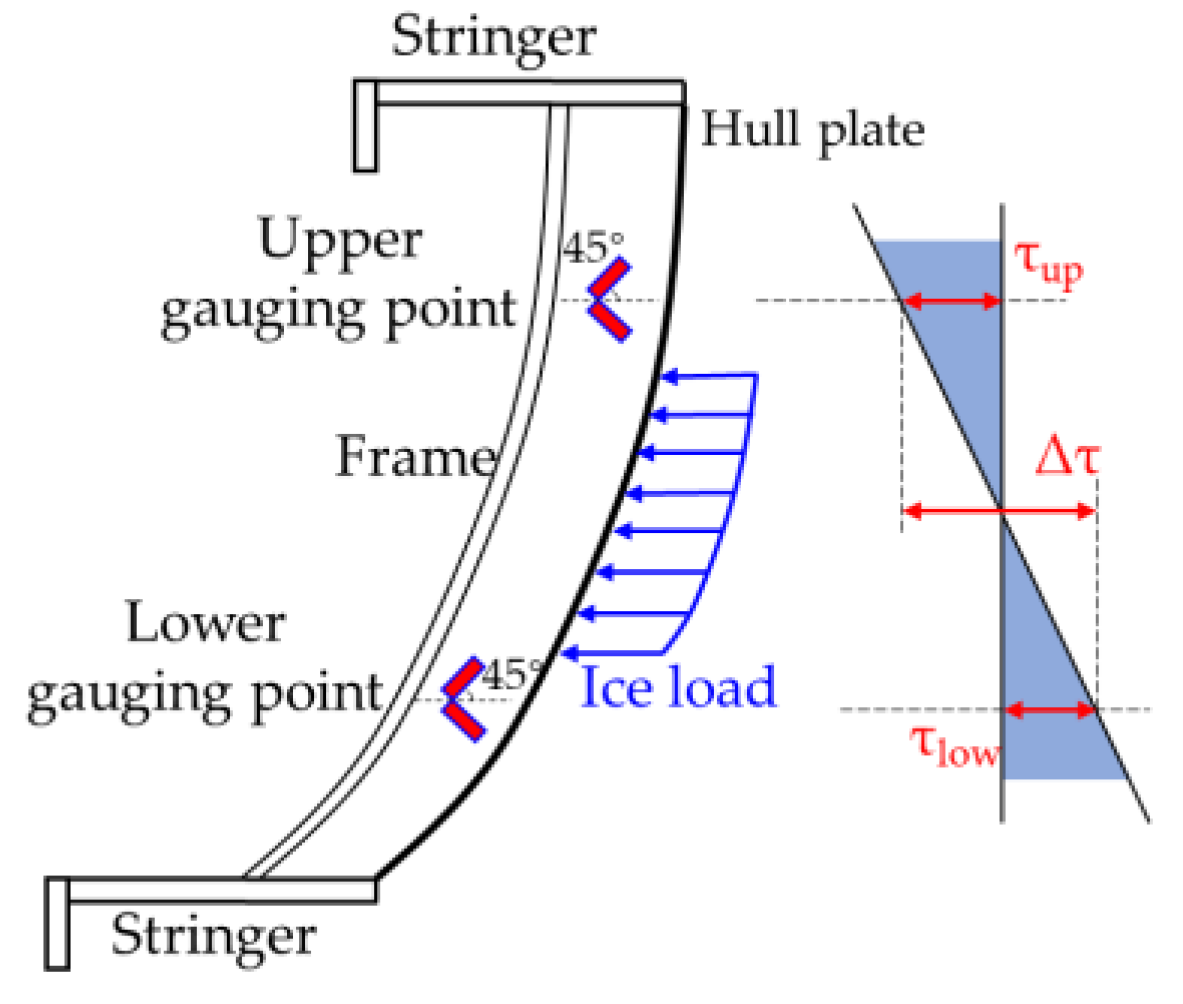
3.1.3. Local Ice Load Identification Method
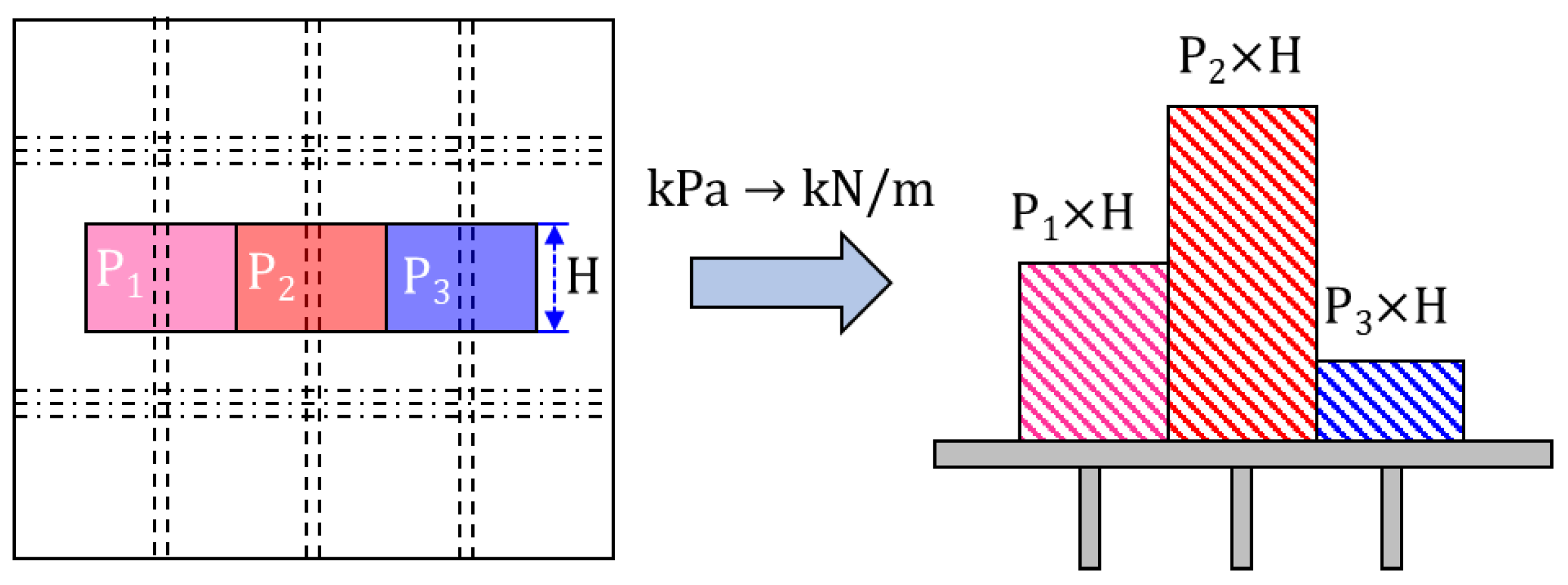
3.1.4. Simplification of Local Ice Loads
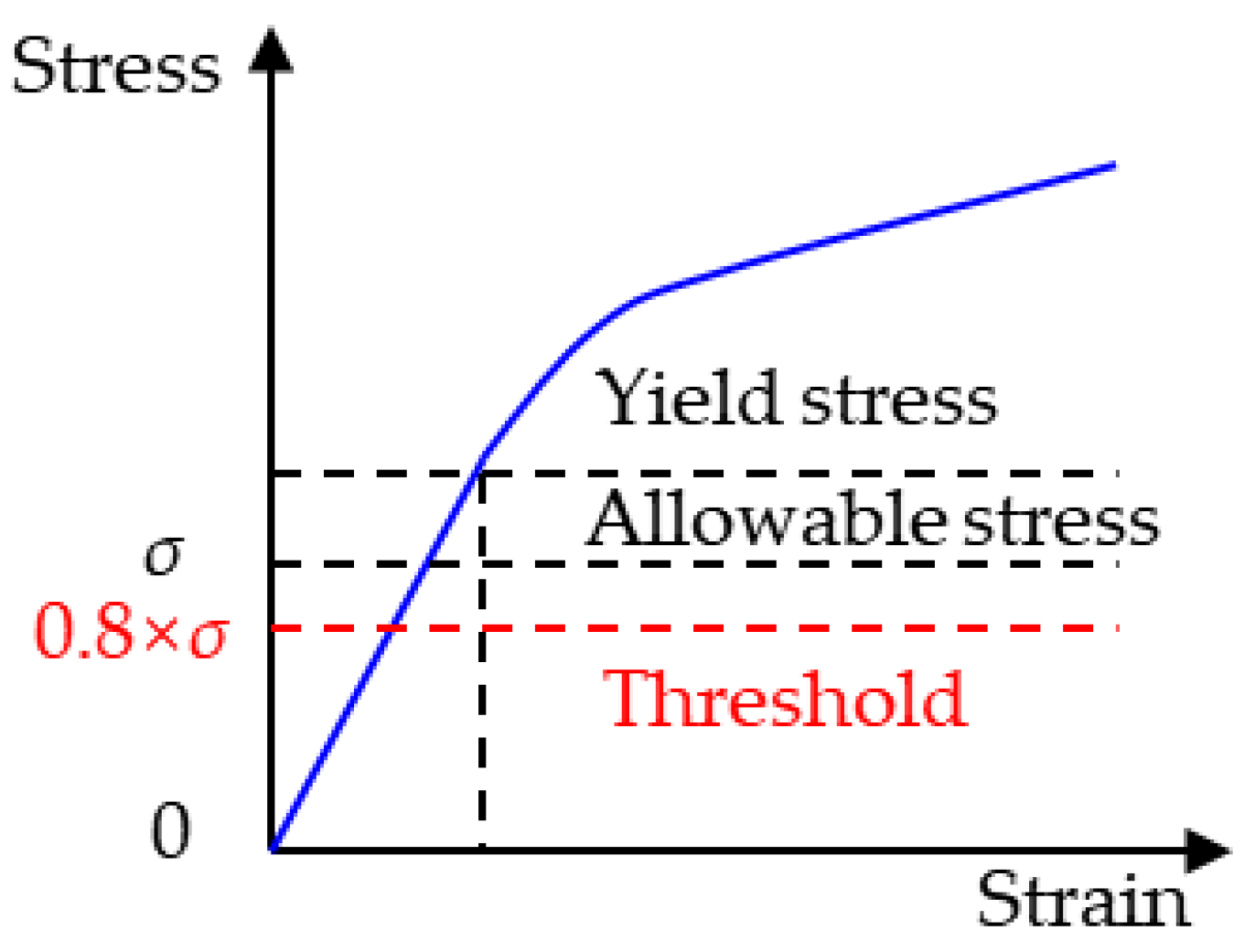
3.1.5. Local Ice Load Assessment
3.2. Full-Scale Data and Numerical Analysis
3.2.1. Full-Scale Data Source
3.2.2. Local Structural Numerical Model
3.2.3. Numerical Model Calibration
3.3. Case Study and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| M/V | Merchant Vessel |
| SHM | Structural health monitoring |
| SVM | Support vector machine |
| DVR | Digital video storage |
| HD | High-definition |
| DCNN | Deep Convolutional Neural Network |
| IoU | Intersection over Union |
| UIWL | Upper ice waterline |
| LIWL | Lower ice waterline |
| ICM | Influence coefficient matrix method |
| CCS | China Classification Society |
References
- Ebinger, C.K.; Zambetakis, E. The geopolitics of Arctic melt. Int. Aff. 2009, 85, 1215–1232. [Google Scholar] [CrossRef]
- Pang, X.; Zhang, C.; Ji, Q.; Chen, Y.; Zhu, Z.; Zhu, Y.; Yan, Z. Analysis of sea ice conditions and navigability in the Arctic Northeast Passage during the summer from 2002–2021. Geo-Spat. Inf. Sci. 2023, 26, 465–479. [Google Scholar] [CrossRef]
- Zhang, Y.; Meng, Q.; Ng, S.H. Shipping efficiency comparison between Northern Sea Route and the conventional Asia-Europe shipping route via Suez Canal. J. Transp. Geogr. 2016, 57, 241–249. [Google Scholar] [CrossRef]
- Hu, B.; Liu, L.; Wang, D. Prediction of performance of a non-icebreaking ship in marginal ice zone. J. Hydrodyn. 2022, 34, 93–103. [Google Scholar] [CrossRef]
- Fu, S.; Zhang, D.; Montewka, J.; Yan, X.; Zio, E. Towards a probabilistic model for predicting ship besetting in ice in Arctic waters. Reliab. Eng. Syst. Saf. 2016, 155, 124–136. [Google Scholar] [CrossRef]
- Min, R.; Liu, Z.; Pereira, L.; Yang, C.; Sui, Q.; Marques, C. Optical fiber sensing for marine environment and marine structural health monitoring: A review. Opt. Laser Technol. 2021, 140, 107082. [Google Scholar] [CrossRef]
- Okasha, N.M.; Frangopol, D.M.; Decò, A. Integration of structural health monitoring in life-cycle performance assessment of ship structures under uncertainty. Mar. Struct. 2010, 23, 303–321. [Google Scholar] [CrossRef]
- Reed, H.M.; Earls, C.J. Stochastic identification of the structural damage condition of a ship bow section under model uncertainty. Ocean Eng. 2015, 103, 123–143. [Google Scholar] [CrossRef]
- Decò, A.; Frangopol, D.M. Real-time risk of ship structures integrating structural health monitoring data: Application to multi-objective optimal ship routing. Ocean Eng. 2015, 96, 312–329. [Google Scholar] [CrossRef]
- Zambon, A.; Moro, L.; Brown, J.; Kennedy, A.; Oldford, D. A Measurement System to Monitor Propulsion Performance and Ice-Induced Shaftline Dynamic Response of Icebreakers. J. Mar. Sci. Eng. 2022, 10, 522. [Google Scholar] [CrossRef]
- Turnbull, I.D.; Bourbonnais, P.; Taylor, R.S. Investigation of two pack ice besetting events on the Umiak I and development of a probabilistic prediction model. Ocean Eng. 2019, 179, 76–91. [Google Scholar] [CrossRef]
- Seymour, W.L.; Katharine, A.G.; Andy, L.R.; Duncan, J.W. CryoSat-2 estimates of Arctic sea ice thickness and volume. Geophys. Res. Lett. 2013, 40, 732–737. [Google Scholar]
- Aldenhoff, W.; Berg, A.; Eriksson, L.E.B. Sea Ice Concentration Estimation from Sentinel-1 Synthetic Aperture Radar Images over the Fram Strait; IEEE International Geoscience and Remote Sensing Symposium (IGARSS): Beijing, China, 2016; pp. 7675–7677. [Google Scholar]
- Weissling, B.; Ackley, S.; Wagner, P.; Xie, H. EISCAM-Digital image acquisition and processing for sea ice parameters from ships. Cold Reg. Sci. Technol. 2009, 57, 49–60. [Google Scholar] [CrossRef]
- Toyota, T.; Haas, C.; Tamura, T. Size distribution and shape properties of relatively small sea-ice floes in the Antarctic marginal ice zone in late winter. Deep Sea Res. Part II Top. Stud. Oceanogr. 2011, 58, 1182–1193. [Google Scholar] [CrossRef]
- Zhang, Q.; Skjetne, R.; Metrikin, I.; Løset, S. Image processing for ice floe analyses in broken-ice model testing. Cold Reg. Sci. Technol. 2015, 111, 27–38. [Google Scholar] [CrossRef]
- Chi, J.; Kim, H. Prediction of Arctic sea ice concentration using a fully data driven deep neural network. Remote Sens. 2017, 9, 1305. [Google Scholar] [CrossRef]
- Kalke, H.; Loewen, M. Support vector machine learning applied to digital images of river ice conditions. Cold Reg. Sci. Technol. 2018, 155, 225–236. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Detecting sea ice from techdemosat-1 data using support vector machines with feature selection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1409–1416. [Google Scholar] [CrossRef]
- Kim, D.H.; Nam, J.H. Determination of the lower boundary of a rotating ice patch for ice thickness estimation using image convolution and machine learning. Cold Reg. Sci. Technol. 2020, 173, 103009. [Google Scholar] [CrossRef]
- Böhm, A.M.; von Bock und Polach, R.U.F.; Herrnring, H.; Ehlers, S. The measurement accuracy of instrumented ship structures under local ice loads using strain gauges. Mar. Struct. 2021, 76, 102919. [Google Scholar] [CrossRef]
- Suyuthi, A.; Leira, B.J.; Riska, K. Short term extreme statistics of local ice loads on ship hulls. Cold Reg. Sci. Technol. 2012, 82, 130–143. [Google Scholar] [CrossRef]
- Suominen, M.; Kujala, P.; Romanoff, J.; Remes, H. Influence of load length on short-term ice load statistics in full-scale. Mar. Struct. 2017, 52, 153–172. [Google Scholar] [CrossRef]
- Li, F.; Goerlandt, F.; Kujala, P.; Lensu, M. Evaluation of selected state-of-the-art methods for ship transit simulation in various ice conditions based on full-scale measurement. Cold Reg. Sci. Technol. 2018, 151, 94–108. [Google Scholar] [CrossRef]
- Choi, J.; Park, G.; Kim, Y.; Jang, K.; Park, S.; Ha, M.; Han, Y.; Iyerusalimskiy, A.; St John, J. Ice Load Monitoring System for Large Arctic Shuttle Tanker. In Proceedings of the International Conference on Ship and Offshore Technology, Busan, Republic of Korea, 28–29 September 2009. [Google Scholar]
- Leira, B.; Børsheim, L.; Espeland, Ø.; Amdahl, J. Ice-load estimation for a ship hull based on continuous response monitoring. J. Eng. Marit. Environ. 2009, 223, 529–540. [Google Scholar] [CrossRef]
- Wang, Q.; Lu, P.; Zu, Y.; Li, Z.; Leppäranta, M.; Zhang, G. Comparison of Passive Microwave Data with Shipborne Photographic Observations of Summer Sea Ice Concentration along an Arctic Cruise Path. Remote Sens. 2019, 11, 2009. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, X.; Ji, S. Semantic image segmentation for sea ice parameters recognition using deep convolutional neural networks. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102885. [Google Scholar] [CrossRef]
- Lensu, M.; HÄanninen, S. Short term monitoring of ice loads experienced by ships. In Proceedings of the 17th International Conference on Port and Ocean Engineering under Arctic Conditions, Trondheim, Norway, 16–19 June 2003. [Google Scholar]
- Kubiczek, J.M.; Andresen-Paulsen, G.; Herrnring, H.; von Bock und Polach, F.; Ehlers, S. Development of a design load patch for the consideration of ice loads. Ships Offshore Struct. 2020, 15, 20–28. [Google Scholar] [CrossRef]
- Liu, L.; Ji, S. Comparison of sphere-based and dilated-polyhedron-based discrete element methods for the analysis of ship–ice interactions in level ice. Ocean Eng. 2022, 244, 110364. [Google Scholar] [CrossRef]
- Kong, S.; Cui, H.Y.; Tian, Y.; Ji, S. Identification of ice loads on shell structure of ice-going vessel with Green kernel and regularization method. Mar. Struct. 2020, 74, 102820. [Google Scholar] [CrossRef]
- Yamauchi, Y.; Mizuno, S.; Tsukuda, H. The icebreaking performance of Shirase in the maiden Antarctic voyage. In Proceedings of the International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011. [Google Scholar]
- Suominen, M.; Kujala, P.; Romanoff, J.; Remes, H. The effect of the extension of the instrumentation on the measured ice-induced load on a ship hull. Ocean Eng. 2017, 144, 327–339. [Google Scholar] [CrossRef]
- Kwon, Y.H.; Lee, T.K.; Choi, K. A study on measurements of local ice pressure for ice breaking research vessel “ARAON” at the Amundsen Sea. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 490–499. [Google Scholar] [CrossRef]
- Ritch, R.; Frederking, R.; Johnston, M.; Browne, R.; Ralph, F. Local ice pressures measured on a strain gauge panel during the CCGS Terry Fox bergy bit impact study. Cold Reg. Sci. Technol. 2008, 52, 29–49. [Google Scholar] [CrossRef]
- Adams, J.M.; Valtonen, V.; Kujala, P. Validation of the line-like nature of ice-induced loads using an inverse method. In Proceedings of the 25th International Conference on Port and Ocean Engineering under Arctic Conditions, Delft, The Netherlands, 9–13 June 2019. [Google Scholar]
- Huang, L.; Tuhkuri, J.; Igrec, B.; Li, M.; Stagonas, D.; Toffoli, A.; Cardiff, P.; Thomas, G. Ship resistance when operating in floating ice floes: A combined CFD&DEM approach. Mar. Struct. 2020, 74, 102817. [Google Scholar]
- Mohapatra, S.C.; Amouzadrad, P.; Bispo, I.B.d.S.; Soares, C.G. Hydrodynamic Response to Current andwind on a Large Floating Interconnected Structure. J. Mar. Sci. Eng. 2025, 13, 63. [Google Scholar] [CrossRef]
- CCS. Guidelines for Hull Monitoring and Assistant Decision-Making System for Operations in Ice; China Classification Society: Beijing, China, 2018. [Google Scholar]
- He, S.; Chen, X.; Kong, S.; Ji, S. Measurement and identification of ice loads on hull structures in far field based on dynamic effects. Chin. J. Ship Res. 2021, 16, 54–63. [Google Scholar]
- Wang, J.; Chen, X.; Sun, K.; Ji, S. Far-field identification of ice loads on ship structures by radial basis function neural network. Ocean Eng. 2023, 282, 115072. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | -Sea (%) | -Ice (%) | -Sky (%) | -Ship (%) | (%) |
|---|---|---|---|---|---|
| Testing set | 82.35 | 93.18 | 87.75 | 99.43 | 90.68 |
| No. | Date | UTC Time | Ship Speed (m/s) | Draft (m) | Ice Type | Ice Thickness (m) | Ice Failure Pattern |
|---|---|---|---|---|---|---|---|
| 1 | 2 August 2019 | 12:02 | 5.14 | 6.5 | Ice floe | 1.2 | Compression |
| 2 | 3 August 2019 | 3:08 | 4.24 | 6.5 | Ice cake | 1.5 | Inversion and slip |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; He, S.; Jiang, H.; Chen, X.; Ji, S. Research on Sea Ice and Local Ice Load Monitoring System for Polar Cargo Vessels. J. Mar. Sci. Eng. 2025, 13, 808. https://doi.org/10.3390/jmse13040808
Jiang J, He S, Jiang H, Chen X, Ji S. Research on Sea Ice and Local Ice Load Monitoring System for Polar Cargo Vessels. Journal of Marine Science and Engineering. 2025; 13(4):808. https://doi.org/10.3390/jmse13040808
Chicago/Turabian StyleJiang, Jinhui, Shuaikang He, Herong Jiang, Xiaodong Chen, and Shunying Ji. 2025. "Research on Sea Ice and Local Ice Load Monitoring System for Polar Cargo Vessels" Journal of Marine Science and Engineering 13, no. 4: 808. https://doi.org/10.3390/jmse13040808
APA StyleJiang, J., He, S., Jiang, H., Chen, X., & Ji, S. (2025). Research on Sea Ice and Local Ice Load Monitoring System for Polar Cargo Vessels. Journal of Marine Science and Engineering, 13(4), 808. https://doi.org/10.3390/jmse13040808