1. Introduction
The accurate acquisition of seawater sound-speed profiles (SSPs) is critical for high-precision deep-sea multibeam bathymetry [
1,
2,
3,
4]. The most direct method of obtaining an SSP is through on-site observations. However, this approach is time-consuming and labor-intensive. Moreover, due to the spatiotemporal variability of sound speed, these on-site observations cannot provide real-time SSPs over a large area. In recent years, vertical marine observation data (including ship-based measurements and fixed-point observations at SSP stations, moorings, and buoys) have significantly increased. The World Ocean Atlas 2023 (WOA23) is one of the most authoritative and comprehensive marine temperature–salinity datasets internationally, widely used in marine science and related research fields. By integrating marine observation data from around the globe, and after stringent quality control and interpolation processing, this dataset can provide high-precision information on the distribution of marine temperature and salinity. These data provided the basic marine environmental background for this study, aiding in the analysis of marine physical properties and their impact on related phenomena [
5]. Nevertheless, the spatial resolution of existing vertical observation data remains relatively low, and these data cannot be used to describe the internal structural changes in the ocean in real time. On the other hand, due to the diversity of marine environmental changes, the surface sound speed of seawater is greatly affected by seasons, climate, and sea surface temperature. There is a significant difference between historical SSP data and the actual environment, which cannot meet the needs of real-time sound-speed correction in multibeam measurements. Therefore, combining the surface sound speed measured by the multibeam system with the historical SSP data in the survey area to invert the real-time SSP on-site is a good solution.
To address the issue of the real-time inversion of SSPs, the academic community has proposed a variety of theories and methods. In early research, LeBlanc and Middleton [
6] constructed an underwater sound-speed data model, using statistical methods to predict SSPs, but they did not consider the spatiotemporal dynamic changes. Davis [
7] proposed a climate-state prediction model based on the correlation between the sea surface temperature and sound speed, laying the foundation for subsequent data assimilation research. With the development of the empirical orthogonal function (EOF) method, Shen et al. [
8] first introduced the EOF into the reconstruction of shallow-water SSPs, verifying the effectiveness of its dimensionality reduction representation. Ding et al. [
9] further applied it to multibeam measurements, proposing a method for constructing the sound-speed field based on the interpolation of EOF coefficients. However, due to data sparsity, the error in deep-sea scenarios was significant.
In recent years, the combination of data-driven approaches and optimization algorithms has become a research hotspot. Zhang et al. [
10] utilized the EOF to reconstruct deep-sea SSPs and combined multibeam data to verify the accuracy of the correction, but they did not solve the problem of the dynamic adaptation of surface sound speed. Huang et al. [
11] proposed a method for reconstructing the full-depth SSP, reducing the shallow layer error to 0.2 m/s through stratified error control; however, this method relied on dense real-measurement data. In terms of optimization algorithms, Zhang et al. [
12] used a simulated annealing algorithm to invert the SSPs, enhancing the global search capability; however, the convergence speed was relatively slow. Li et al. [
13] combined the matched field with neural networks to construct the sound-speed time field, achieving sound-speed prediction in complex sea areas; however, the model generalization was insufficient. In international research, Capell [
14] used multibeam data to invert the error of the SSP, revealing the impact of the sound-speed gradient on the depth measurement accuracy, and providing an important reference for error control. Mohammadloo [
15] successfully inverted the SSPs by minimizing the difference between multibeam overlapping data using Differential Evolution (DE) and Gauss–Newton (GN) optimization algorithms. However, the existing methods still have two major limitations: firstly, they rely solely on model data (such as WOA23) or historical measured data, lacking adaptability to the dynamic changes in surface sound speed; secondly, traditional optimization algorithms (such as genetic algorithms) tend to fall into local optima during the inversion process, resulting in insufficient reconstruction accuracy.
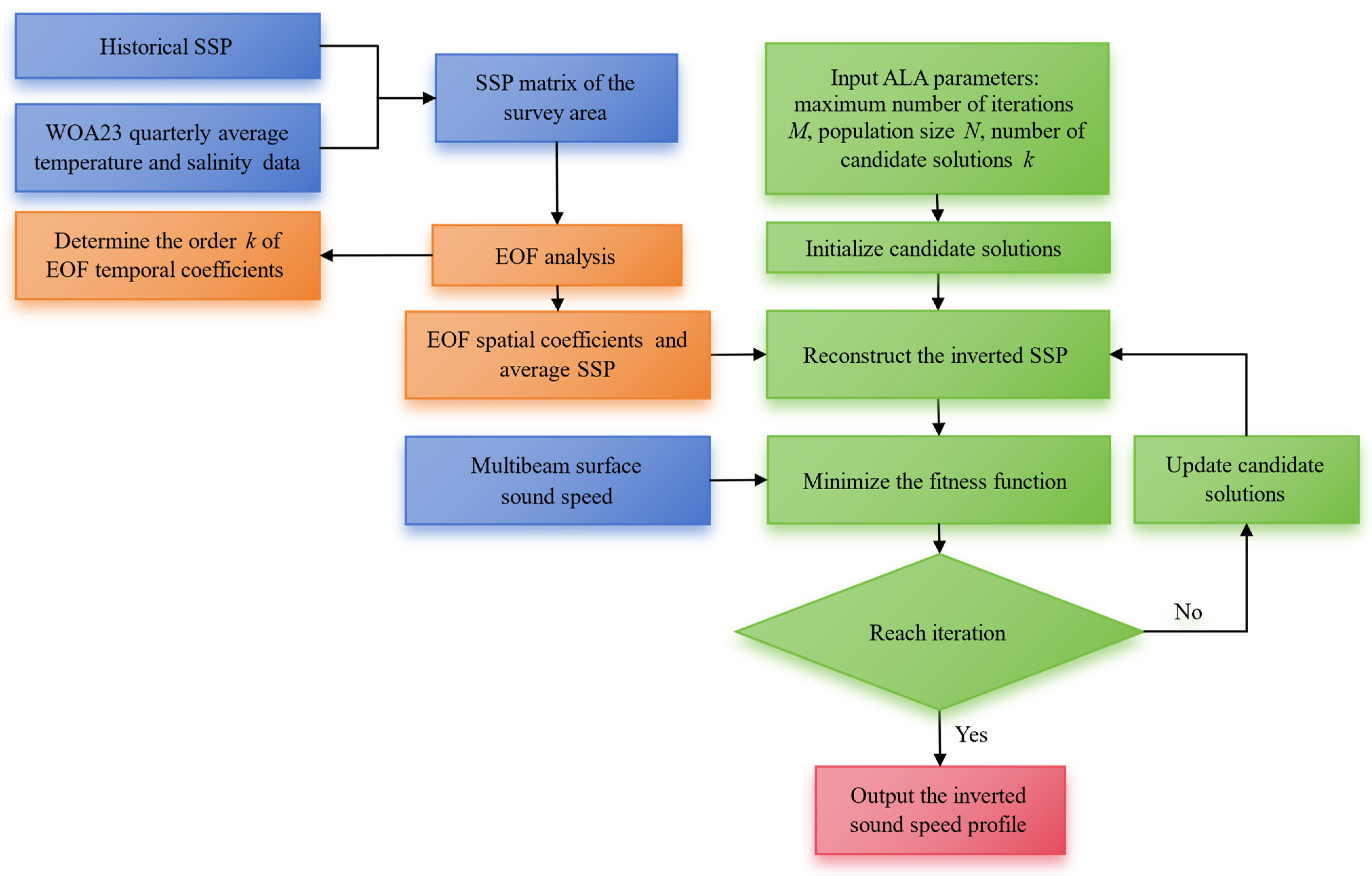
This study proposes a novel approach for sound-speed profile inversion in uncharted deep-sea regions by integrating the high-resolution WOA23 dataset with limited historical in situ measurements. A fitness function is formulated to quantify the discrepancy between real-time surface sound-speed data acquired by multibeam systems and the inverted SSPs, thereby enhancing temporal coherence with field observations and improving the inversion accuracy. The artificial lemming algorithm (ALA), renowned for its global optimization efficiency, is employed to establish a rapid and robust SSP inversion framework. The accuracy and practical utility of the inverted profiles are rigorously evaluated using a constant-gradient acoustic ray-tracing model. Validation with measured multibeam bathymetric data further confirms the method’s validity and feasibility, demonstrating its critical reference value for real-world applications in autonomous underwater vehicle navigation and high-precision seabed mapping.
The remaining content of the paper is organized as follows:
Section 2 details the EOF representation principles, ALA, and joint inversion workflow.
Section 3 describes the experimental data and evaluation metrics.
Section 4 presents the SSP reconstruction accuracy and bathymetric correction results, while
Section 5 concludes with future research directions.
3. Materials and Experiments
3.1. Experimental Data
To verify the effectiveness of the method proposed in this paper, the northwest Pacific Ocean (19°–22° N, 129°–130° E) was selected as the experimental survey area, which is a typical deep-sea survey area. The four historical measured SSP stations used in the experimental survey area originated from the real-time temperature–salinity data measured in December 2022 and 2023, provided by the China Argo Real-time Data Center (
http://www.argo.org.cn, accessed on 10 March 2025). Therefore, to better reduce the inversion errors of SSPs caused by different times and seasons, the quarterly average data of the WOA23 temperature–salinity model for the fourth quarter were chosen for analysis, with a spatial resolution of 0.25° × 0.25°, covering a total of 48 SSP stations. The sound-speed value at the shallowest depth of the historical measured SSPs was used as the surface sound speed for the multibeam, and one of the stations was randomly selected as the station for the inverted SSP. The SSP stations in the experimental survey area are shown in
Figure 2.
Since the 1950s, ocean scientists have successively proposed empirical formulas to calculate sound speed that are applicable to different depth ranges for calculating SSPs [
24]. At present, internationally recognized and more accurate empirical sound-speed formulas include the Wilson, Chen–Millero, and Del Grosso formulas. Lu et al. [
25] have shown that the Chen–Millero formula has stronger applicability, and the National Oceanic and Atmospheric Administration (NOAA) of the United States also recommend using the Chen–Millero formula to calculate sound speed. Therefore, this paper uses this formula to calculate sound speed, as follows:
where
v is the sound speed in meters per second (m/s),
t is the temperature in degrees Celsius (°C),
S is the salinity,
p is the pressure, and the specific calculation of the coefficients
,
,
, and
can be found in the literature [
25]. The applicable ranges of Equation (11) are a temperature scale of [0, 40] °C, a salinity scale of [5, 40]‰, and a seawater pressure scale of [0, 1000] bar.
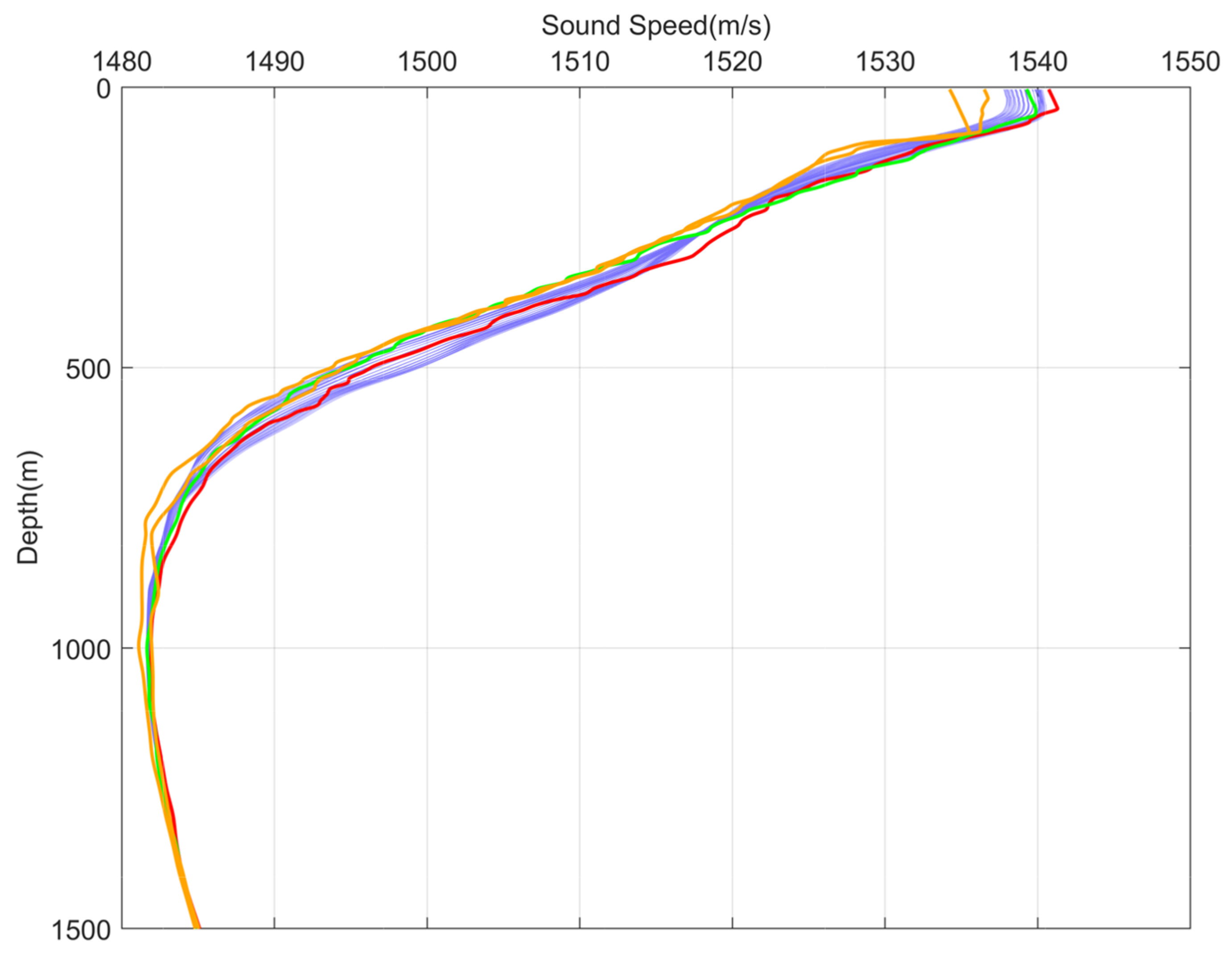
The analysis of the data from each measured SSP station indicates that the sampling depth is around 1500 m. Given that the sampling intervals of the measured SSPs are not fixed and differ significantly from those of the WOA23 SSPs, to facilitate the research, all SSPs in the survey area were standardized. Therefore, in this study, the Akima interpolation method was used to interpolate all SSPs in the survey area at 1 m intervals within the range of [0, 1500] m. The SSPs of each station in the survey area after interpolation are shown in
Figure 3. It can be seen from the figure that the SSPs calculated by the WOA23 model are similar in structure to the measured profiles, with sound velocities ranging from 1480 to 1545 m/s. In the surface thermocline region, sound-speed changes are complex due to the influence of the marine environment, while the sound-speed structure below the sound channel axis is relatively stable, consistent with the typical variation characteristics of deep-sea SSPs.
As can be seen from
Figure 3, the SSPs at the WOA23 model stations exhibit relatively gentle overall variations, with minimal differences among profiles at distinct locations within the survey area. In contrast, the measured SSPs show more pronounced changes in the shallow water zone due to the influence of seasonal climate, with the maximum variation in surface sound speed exceeding 5 m/s. The overall sound-speed structure differs significantly in the upper 1000 m of water depth, and the profiles display a sawtooth pattern rather than a smooth trend. Therefore, the SSPs measured in real-time are more complex than those predicted by the WOA23 model, necessitating further correction of the predicted profiles for high-precision multibeam depth measurement.
3.2. Experimental Process
In order to verify the rationality of this method, a deep-sea area with a water depth of about 1500 m was selected for the experiment. The measurement of high-precision SSPs was carried out with the aim of obtaining high-precision multibeam depth measurement data. Through the analysis of the errors of SSPs inverted through different methods, it was found that the SSP obtained by Inversion Method 2 was not much different from that obtained by the interpolation method. Therefore, to further verify the impact of the inverted SSPs on multibeam depth data, a deep-sea multibeam simulation with a beam angle of 1° and a beam opening angle of 120° was used to analyze the effect of the inverted SSPs on multibeam data sound-speed correction in a deep-sea area with a water depth of about 1500 m. The experimental process was as follows:
(1) EOF analysis: The SSP matrix of the measuring area was composed of the 51 standardized sound-speed profiles discussed in
Section 3.1. After obtaining the SSP matrix in the survey area, an EOF analysis was conducted on the profiles following the steps outlined in
Section 2.3.
(2) Determination of EOF coefficient
k: In order to reduce the order of time coefficients involved in the inversion of sound-speed profile and improve the efficiency of sound-speed profile inversion, the appropriate order
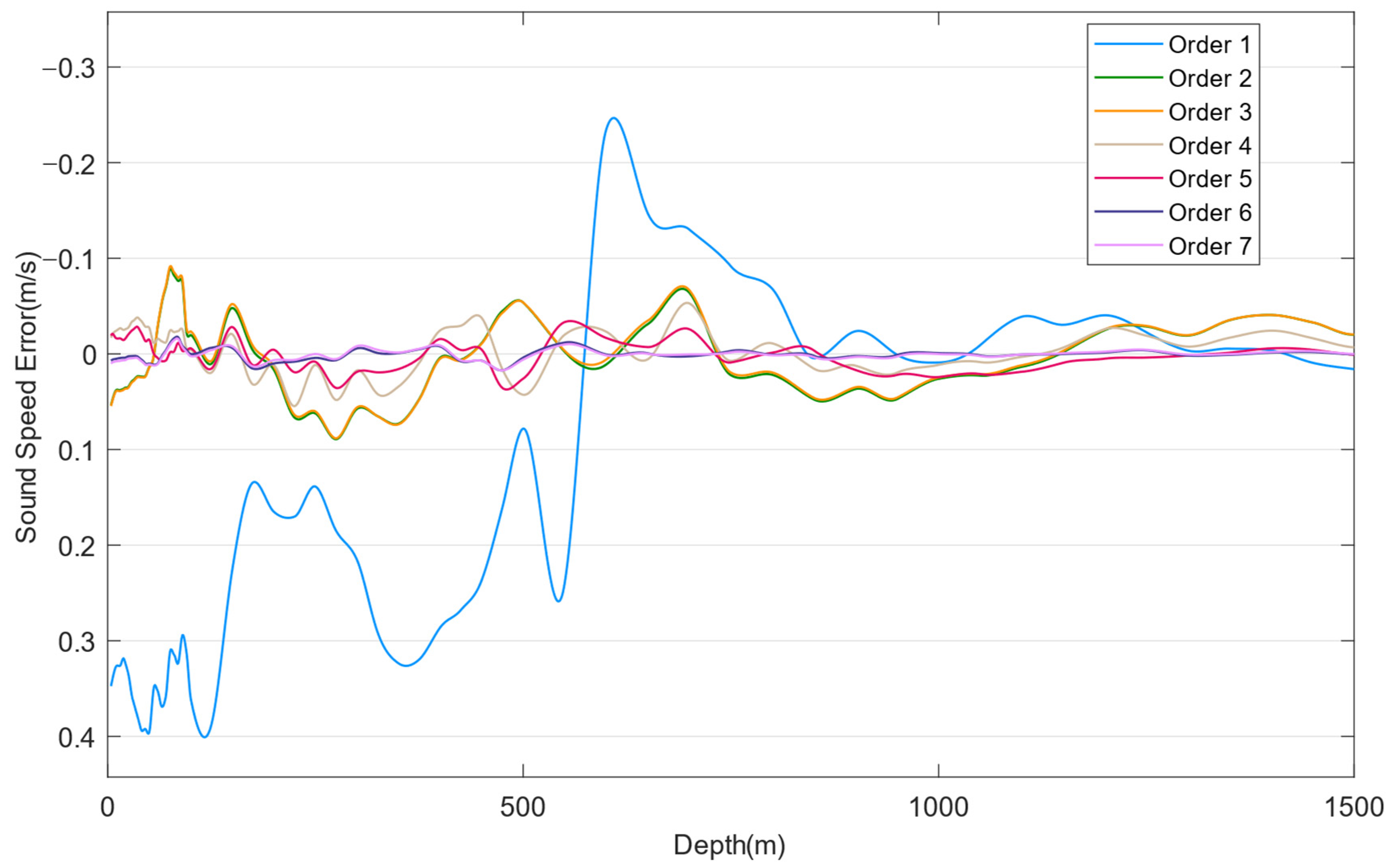
k was determined by analyzing the variance contribution rate of the first seven orders of the EOF and the error of the reconstruction of sound-speed profile. The cumulative variance contribution rates of the first seven EOF modes are listed in
Table 1, while the errors of the reconstructed SSPs are plotted in
Figure 4.
As shown in
Figure 4, the difference between the sound-speed profile represented by only the first EOF mode and the real sound-speed profile is relatively large in the upper 1000 m of water depth, with a maximum sound-speed difference of 0.4 m/s. In contrast, the maximum difference between the sound-speed profiles represented by the first three EOF modes and the real sound-speed profile is only 0.1 m/s. The differences between the sound-speed profiles represented by the first six and seven EOF modes and the real sound-speed profile are both within 0.02 m/s, and the error curves of the two reconstructed sound velocities are smoother, with smaller errors than those represented by the first five EOF modes. This indicates that as the number of EOF modes increases, the reconstructed sound-speed profiles more closely represent the real sound-speed profiles. Moreover, with increasing depth, the reconstructed sound-speed profiles using the EOF analysis are a very close match to the actual sound-speed profiles, with errors of less than 0.01 m/s. Therefore, to reduce the number of parameters and improve computational efficiency, the first six EOF modes were chosen to reconstruct the sound-speed profiles for inversion.
(3) Determination of the ALA optimization parameters: The search range of the upper and lower bounds of ALA is determined by the maximum and minimum values of the first six EOF time coefficients to determine the results, as shown in
Table 2, in order to reduce the search space and improve the computational efficiency of the algorithm. It should be noted that when the optimal time coefficient is the search boundary, the optimal time coefficient should be searched again by expanding the search scope.
According to the content in process (2) of
Section 3.2, the problem dimension was set to 6, representing the order of time coefficients involved in the inversion of the sound-speed profile, the population size was set to 20, the maximum number of iterations was set to 200, and the fitness function was the difference between the surface sound-speed measured by the multibeam sounding system and the inversion sound-speed profile. After the parameters were set, the process in
Section 2.3 was followed for iterative optimization.
(4) Reconstruction and inversion of SSP: According to Equation (8), the sound-speed profile of the measurement area to be inverted is obtained.
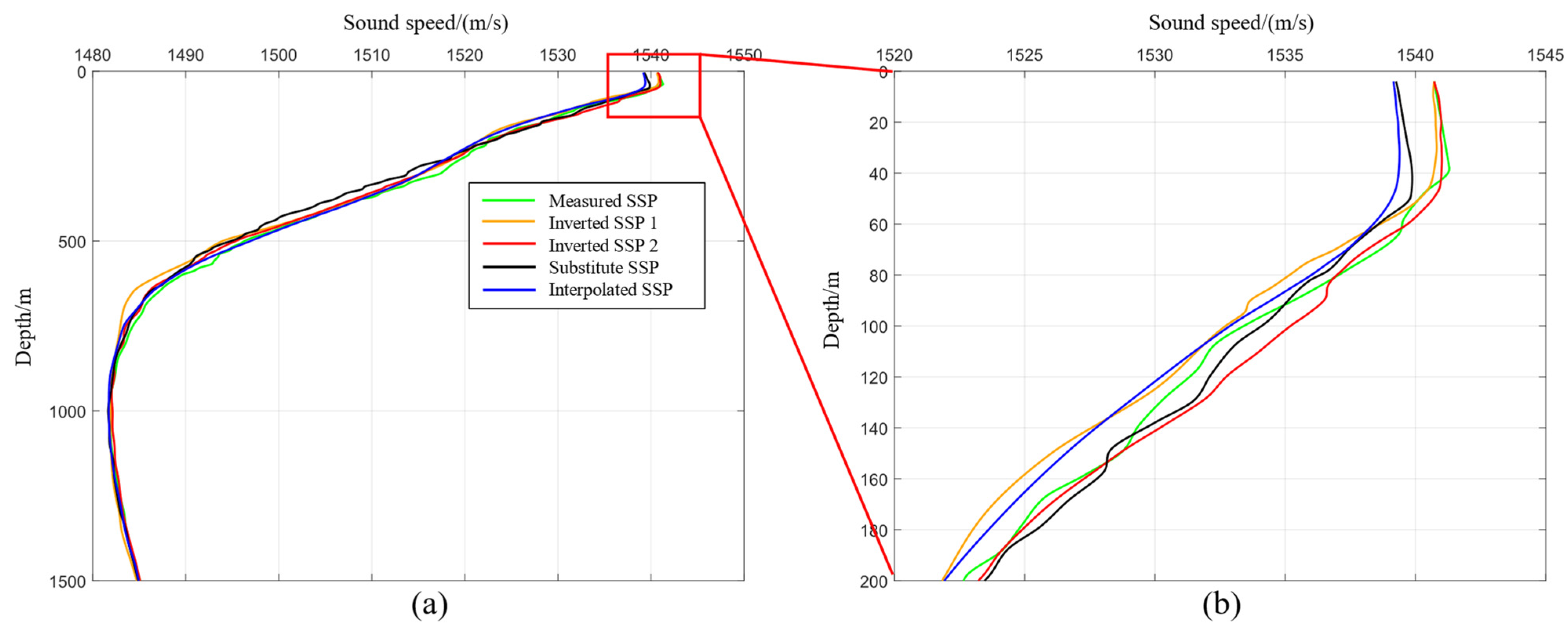
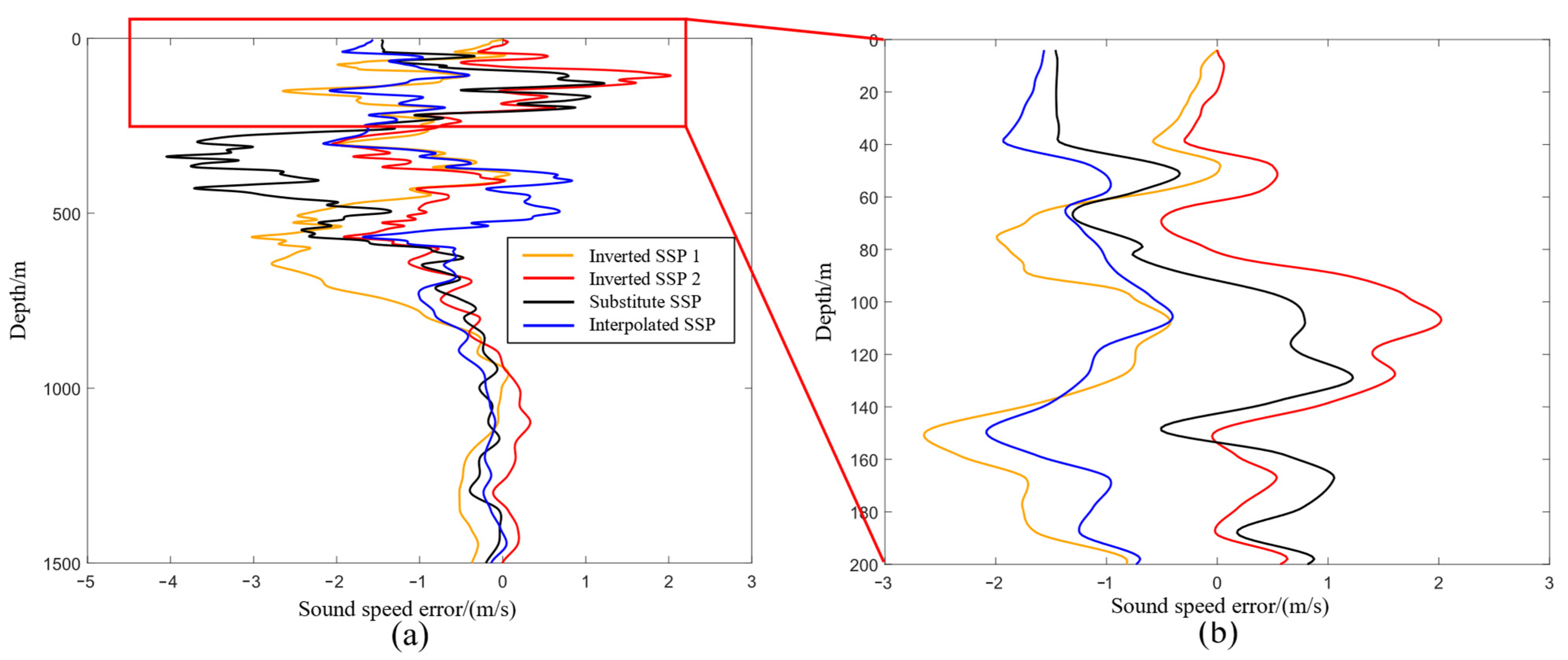
(5) Effectiveness verification: To verify the effectiveness of the method proposed in this paper, four methods were designed for comparative analysis; namely, the substitution method, the interpolation method, an inversion method combining WOA23 temperature–salinity model data with measured surface sound speed (named Inversion Method 1), and an inversion method combining WOA23 temperature–salinity model data and historical measured SSPs with measured surface sound speed (named Inversion Method 2). The substitution method is a commonly used method in current sound-speed correction by surveyors, which uses a nearby measured SSP as a substitute when the survey area lacks SSPs, causing terrain distortion, and then performs multibeam depth measurement data sound-speed correction. The interpolation method obtains the SSP at the missing location via spatial interpolation based on the spatial distribution of historical SSPs in the survey area, using the WOA23 model data as the historical SSP in the unfamiliar survey area and obtaining the SSP at the location to be inverted using the inverse distance-weighted interpolation method. Inversion Method 1 uses the WOA23 temperature–salinity model data in the survey area and inverts the SSP using ALA optimization based on the available surface sound-speed information. Inversion Method 2 uses the WOA23 temperature–salinity model data and a small amount of historical measured SSPs in the survey area, and inverts the SSP using the improved ALA optimization based on the available surface sound-speed information. Inversion Method 1 only used the WOA23 model data to verify the inversion of SSPs in the case where there were no historical SSP data in the unfamiliar deep-sea area for unmanned boats. The inversion process of Inversion Method 2 is essentially consistent with that of Inversion Method 1, and the only difference between the two methods is the different SSPs used.
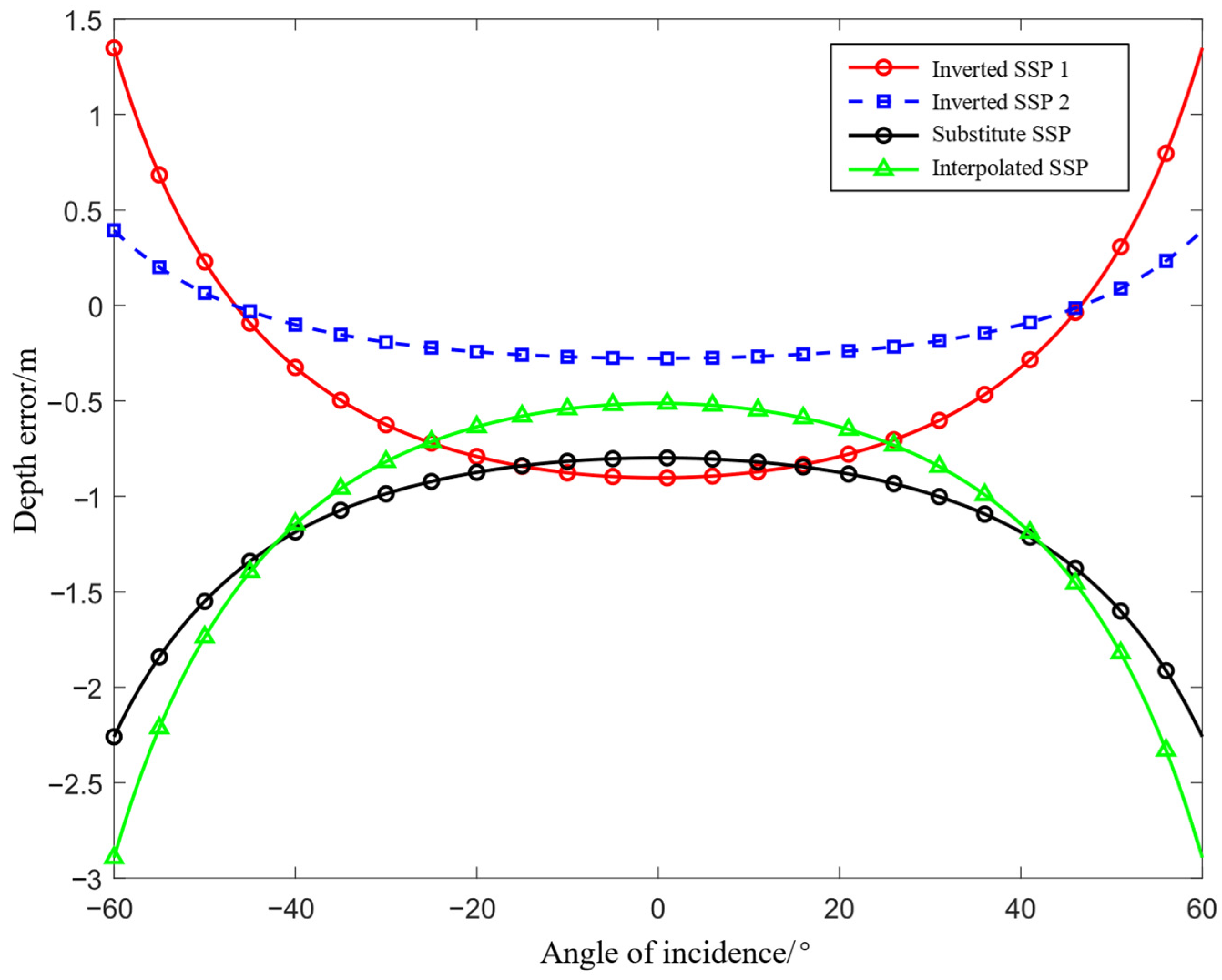
(6) Analysis of water depth error in the inversion of the sound-speed profile: According to the principle of constant gradient acoustic line-tracking, the multibeam echo time of the experimental water depth is obtained using the real sound-speed profile. The sound-speed profiles obtained by the four methods are followed by the constant gradient acoustic line-tracking according to the time, and the multibeam water depth-correction results of the different methods are obtained.
3.3. Evaluation Indicators
In order to comprehensively evaluate the reconstruction performance of each method, the RMSE (root mean square error), MAE (mean absolute error), and ME (maximum error) were selected as evaluation indexes. The RMSE measures the size of the reconstruction error; that is, the difference between the reconstructed value and the true value. The smaller the RMSE, the better the consistency between the reconstructed value and the true value. This index is sensitive to large errors and can effectively reflect the ability of the model to handle outliers or extreme values. The MAE quantifies the average difference between the reconstructed value and the true value. While it is less sensitive than the RMSE, it provides more intuitive results, with smaller values indicating better model performance. The ME identifies the worst-case prediction by measuring the largest absolute deviation between the reconstructed and true values, which is critical for applications requiring strict error control. The calculation formula is as follows:
where
represents the sound-speed value at depth
i in the measured SSP,
represents the sound-speed value at depth
i in the reconstructed SSP, and
m represents the number of sound-speed points.
5. Conclusions
In this study, we addressed the challenge of obtaining real-time SSPs in deep-sea multibeam bathymetry by proposing a novel joint inversion method that integrates WOA23 temperature–salinity model data, historical measured SSPs, and surface sound speed. Experimental validation in the northwest Pacific Ocean demonstrated the proposed method’s effectiveness and superiority. By combining WOA23 quarterly averaged data with historical measured SSPs, a high-resolution regional sound-speed field matrix was constructed, effectively suppressing interference due to seasonal and spatial heterogeneity. The experimental results showed that Inversion Method 2 reduced the MAE, RMSE, and ME of SSP reconstruction by 41.5%, 46.0%, and 49.4%, respectively, compared to traditional substitution methods, validating its robustness in complex sound-speed fields. When applied to multibeam bathymetric correction in deep-sea areas (approximately 1500 m water depth), Inversion Method 2 reduced the depth errors to 0.193 m (MAE), 0.213 m (RMSE), and 0.394 m (ME), achieving an over 82% error reduction compared to traditional substitution methods. This approach significantly mitigates the “smiley face” distortion caused by abrupt sound-speed gradients in edge beams, maintaining depth errors within the specification limit and improving the credibility of seabed topography data. By dynamically selecting the first six principal components of EOF (cumulative variance contribution rate >99.99%), computational complexity was reduced while ensuring reconstruction accuracy. ALA achieved an efficient global optimization of EOF coefficients through adaptive step size adjustment and composite differential operations, addressing the limitations of traditional genetic algorithms prone to local optima. This method provides a reliable solution for sound-speed correction in deep-sea regions lacking real-time SSP measurements and is particularly suitable for constrained platforms such as unmanned surface vehicles. However, the current approach relies on the spatiotemporal consistency of WOA23 and historical data. Future work should further validate its applicability in extreme marine environments (e.g., strong thermoclines and high-noise regions) and explore the deeper integration of machine learning and data assimilation techniques to enhance model generalization.
The proposed joint inversion method demonstrates significant technical advantages in deep-sea SSP reconstruction and multibeam bathymetric correction, offering theoretical support and practical tools for high-precision marine surveying. Future efforts will focus on algorithm parallelization and multi-source data fusion to expand its applications in global marine environmental monitoring.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}