
An Improved Real-Time LOS-Based Model Predictive Control for the Semi-Submersible Offshore Platform Under Ocean Disturbances



Abstract
1. Introduction
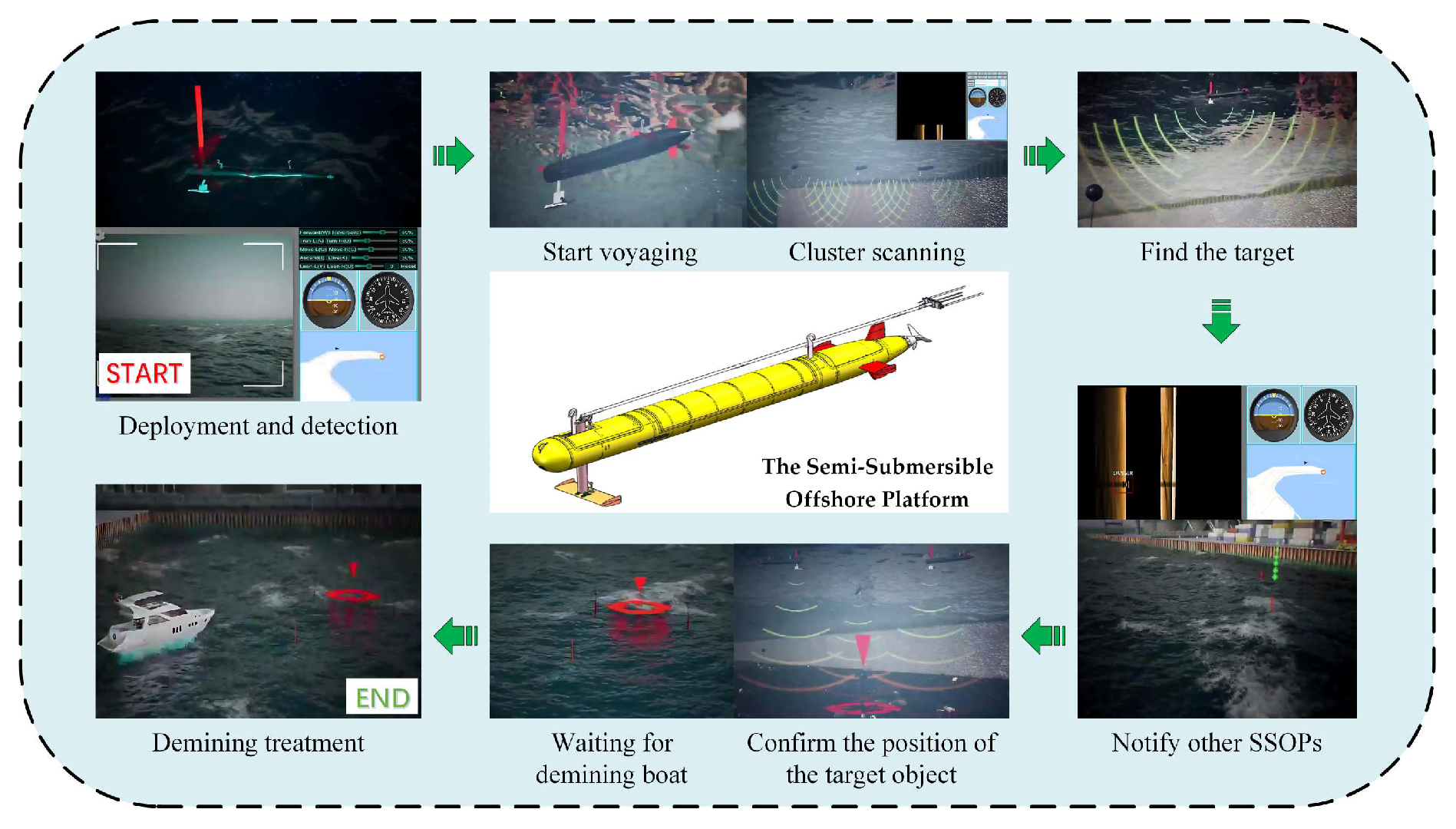
2. Design of the SSOP
2.1. The Concept of the SSOP
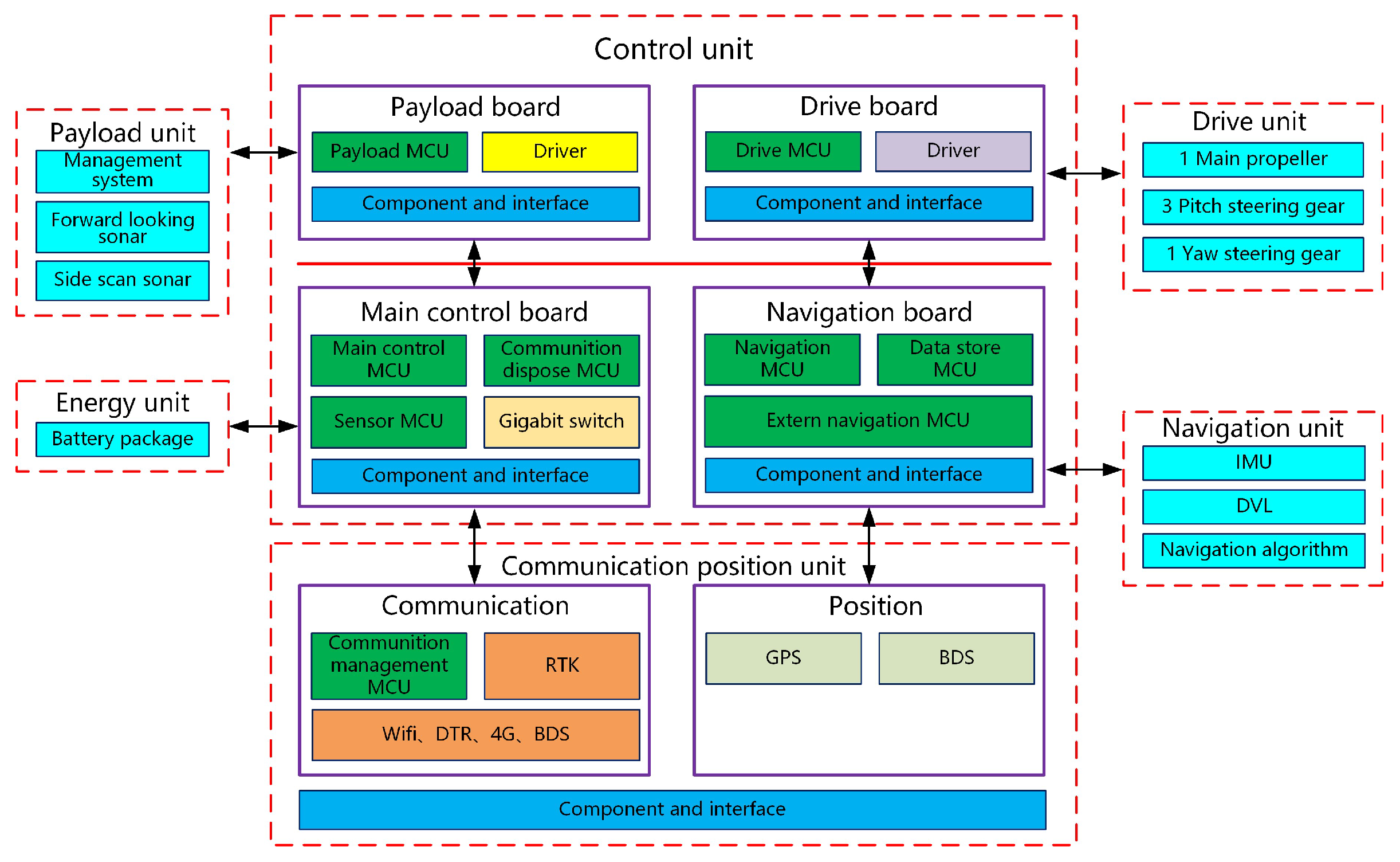
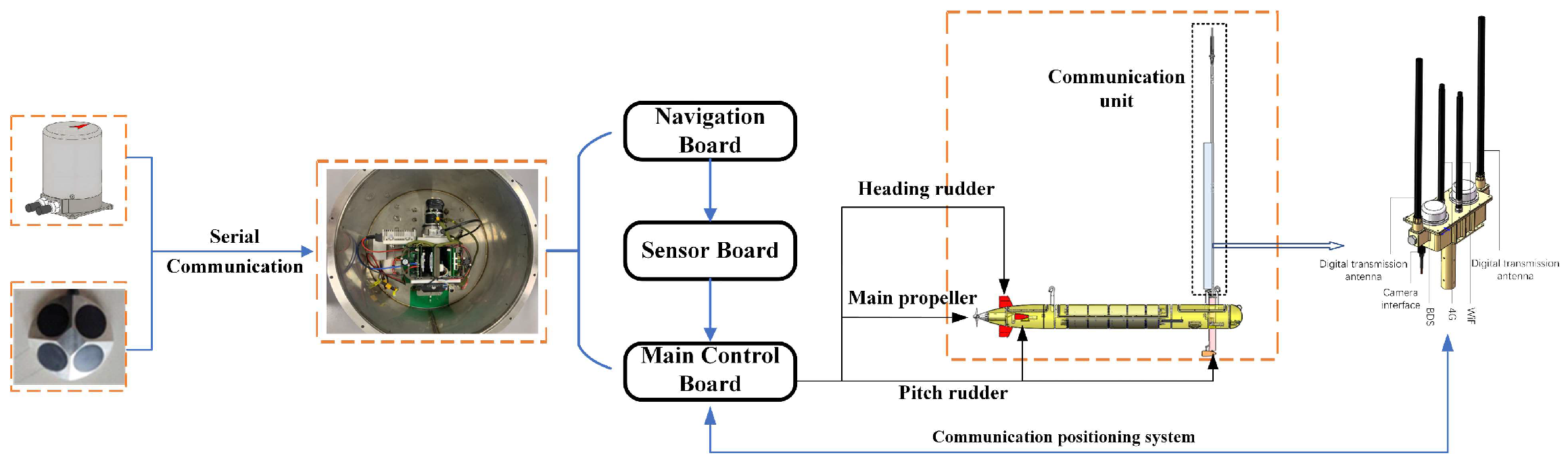
2.2. The Control System
3. System Modeling and Identification
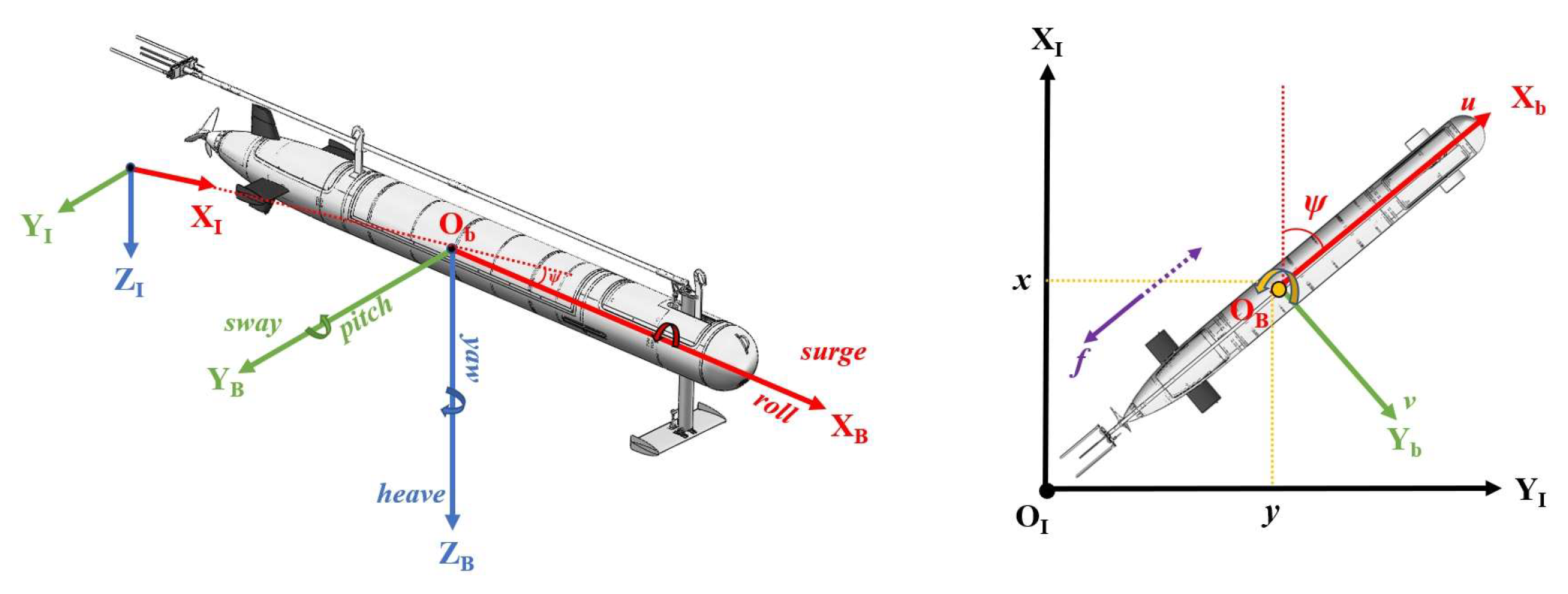
3.1. Kinematic Modeling
3.2. Dynamic Modeling
3.3. Model Parameters Identification
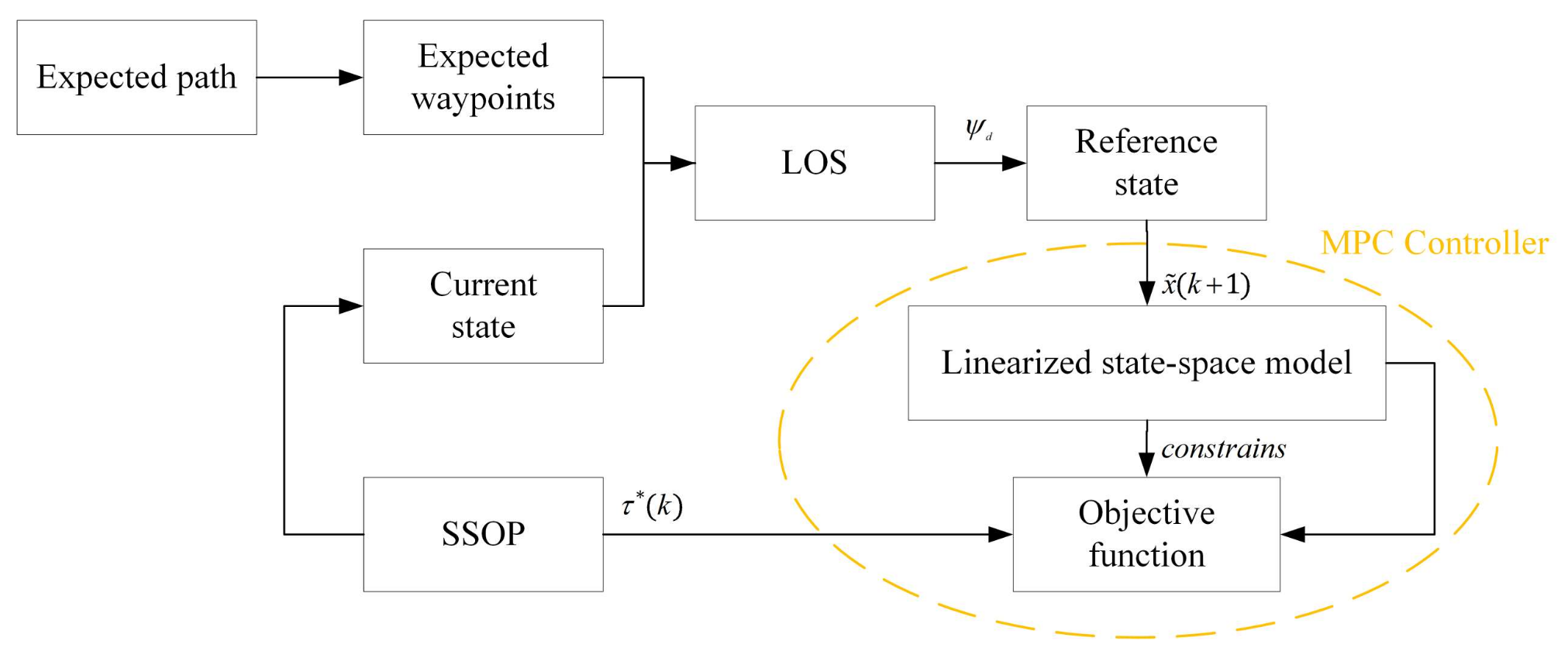
4. LOS-MPC-Based Path Following Controller
4.1. System Controller for the Path Following
4.2. LOS Tracking Method
4.3. Controller Based on MPC
4.3.1. Linearized State-Space-Based Predictive Model of SSOP
4.3.2. Design of the Optimization Function for the State Tracking of SSOP
4.3.3. Solution to the Proposed Algorithm
5. Experiments and Analysis
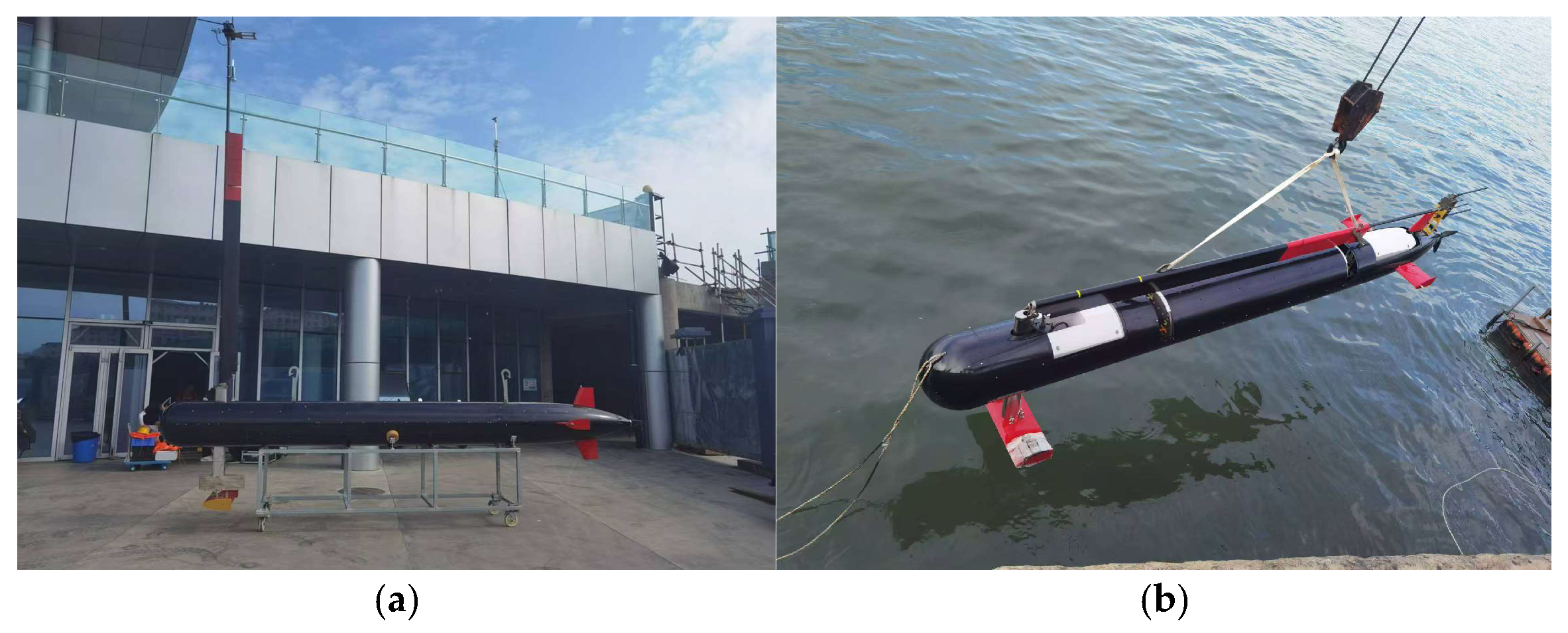
5.1. The Prototype of SSOP
5.2. Ocean Experimental Setup
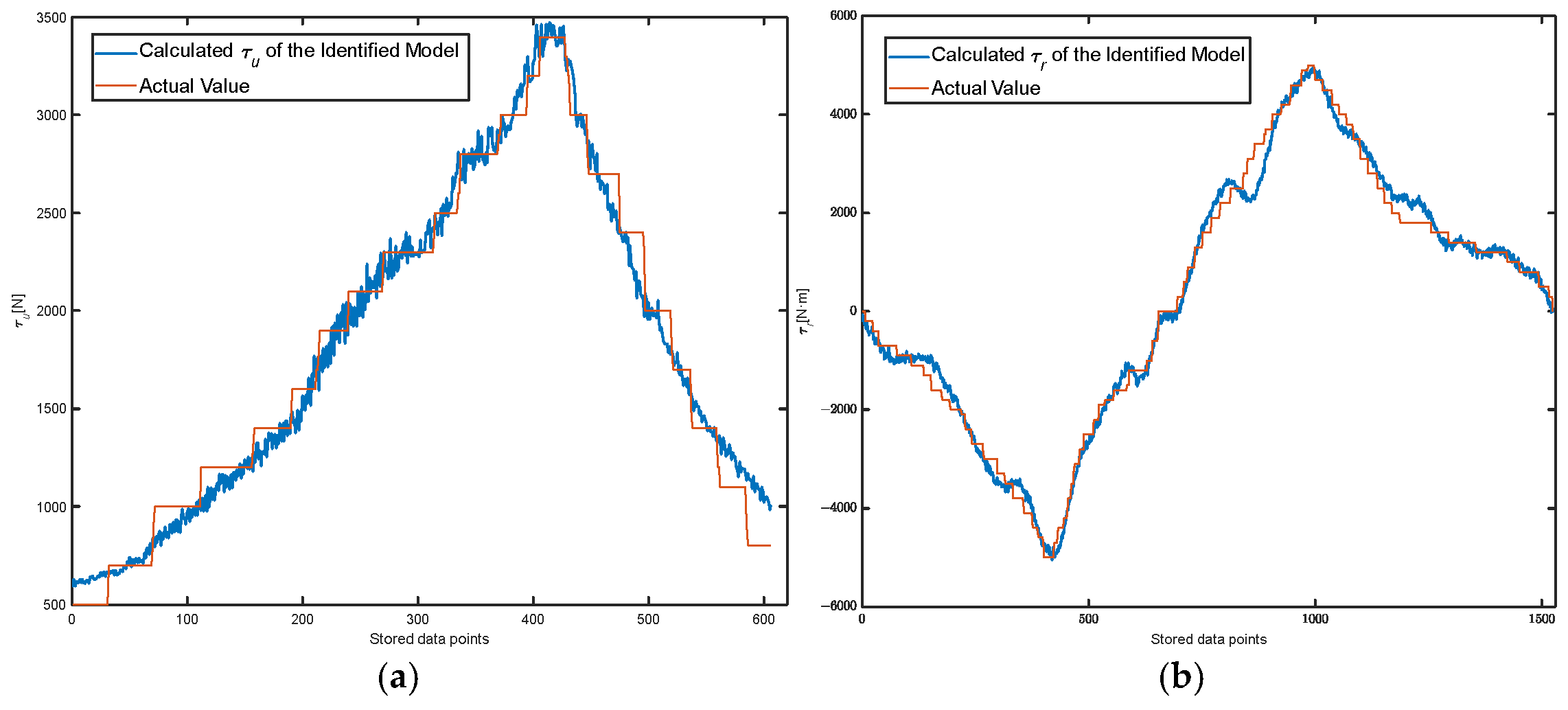
5.3. System Identification Results and Verification
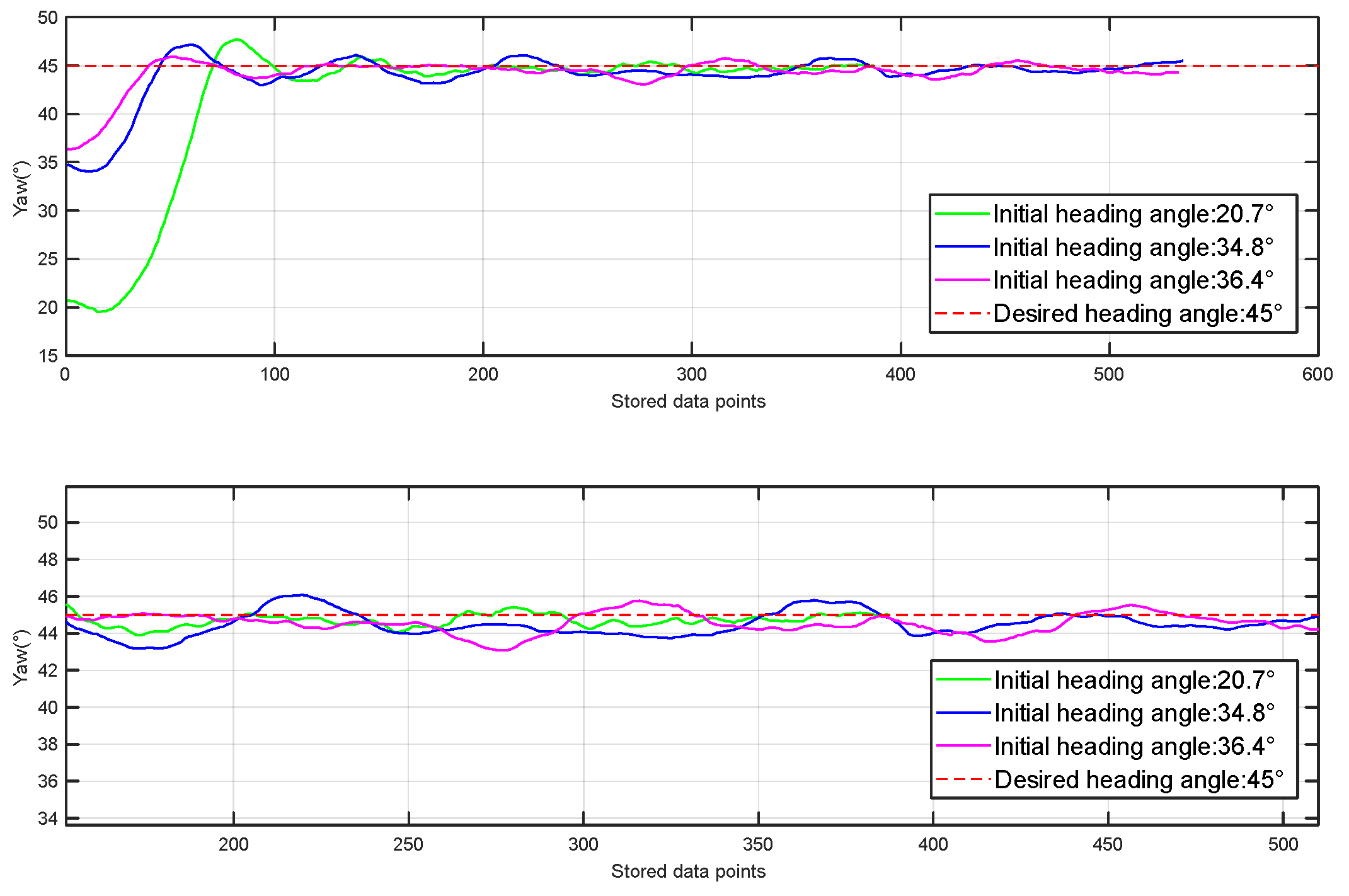
5.4. Directional Control Experiments
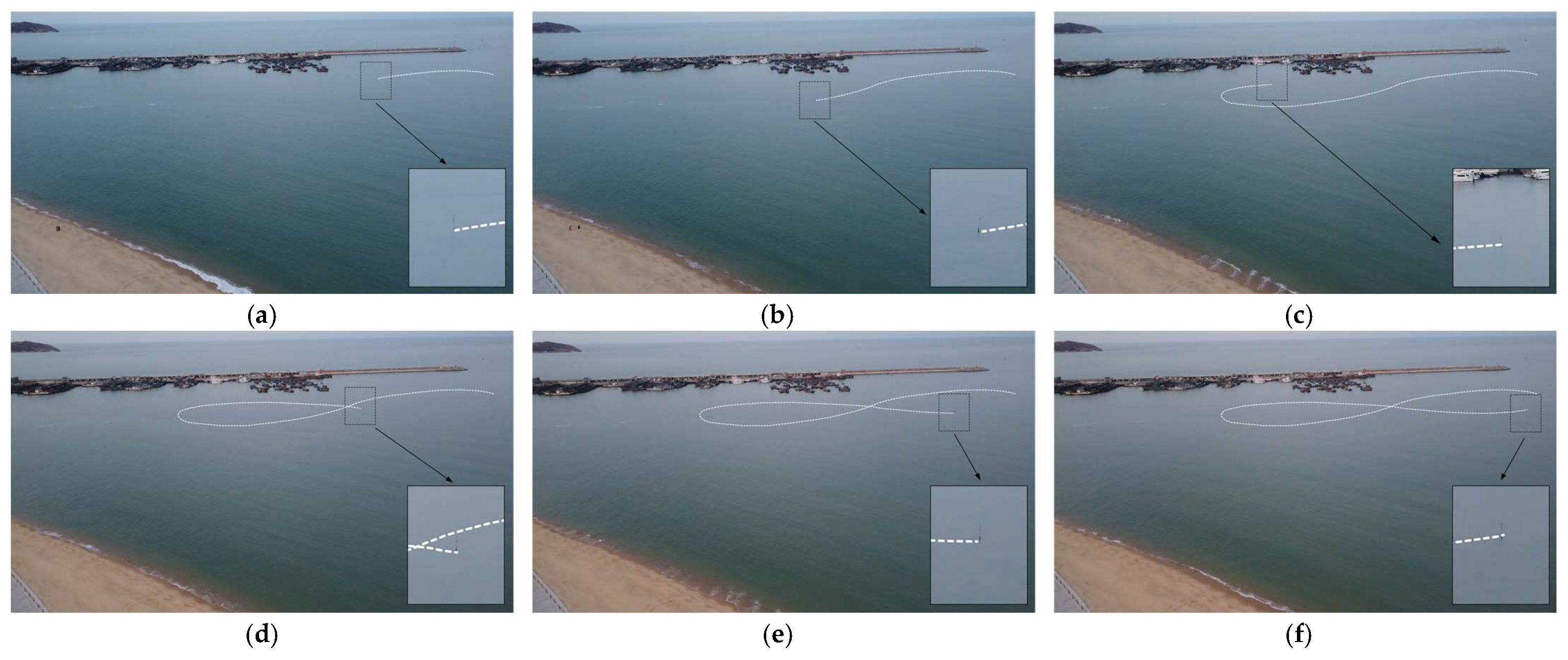
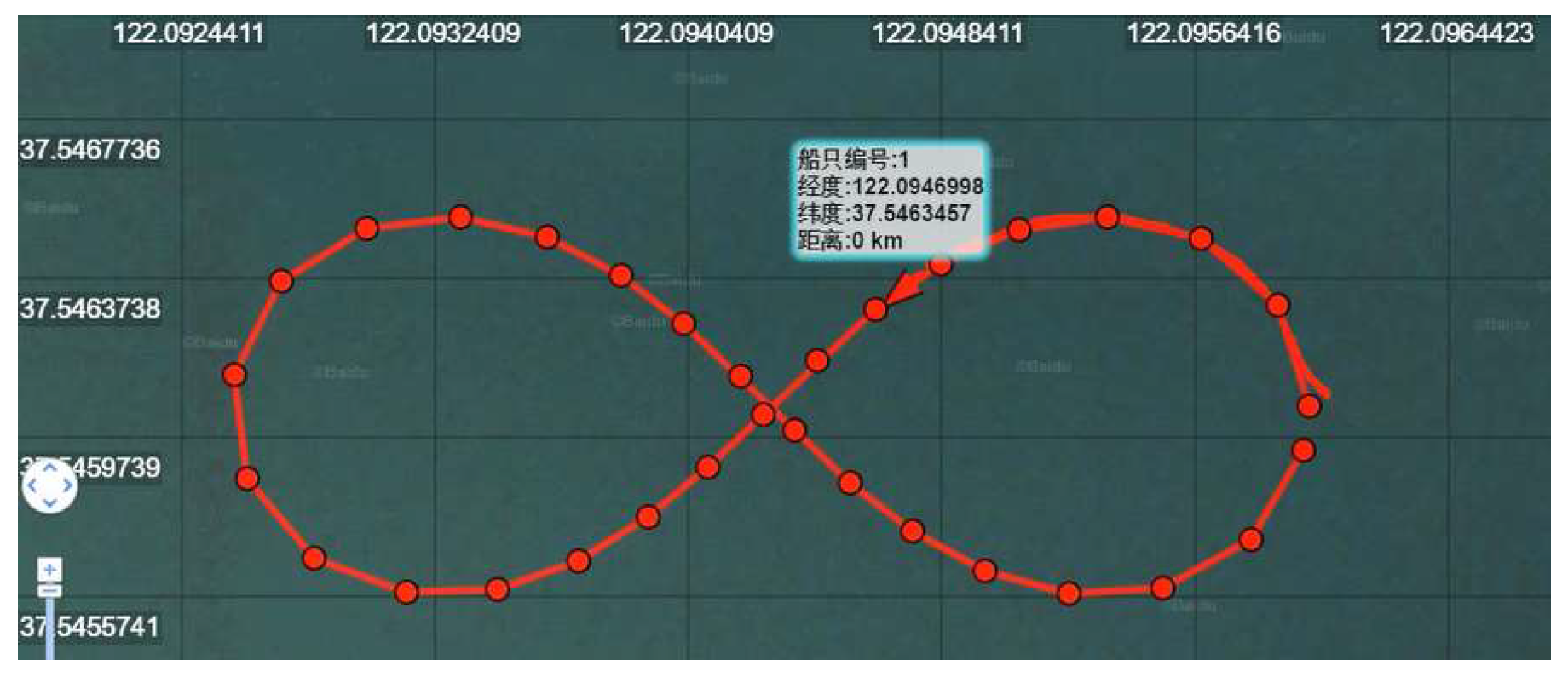
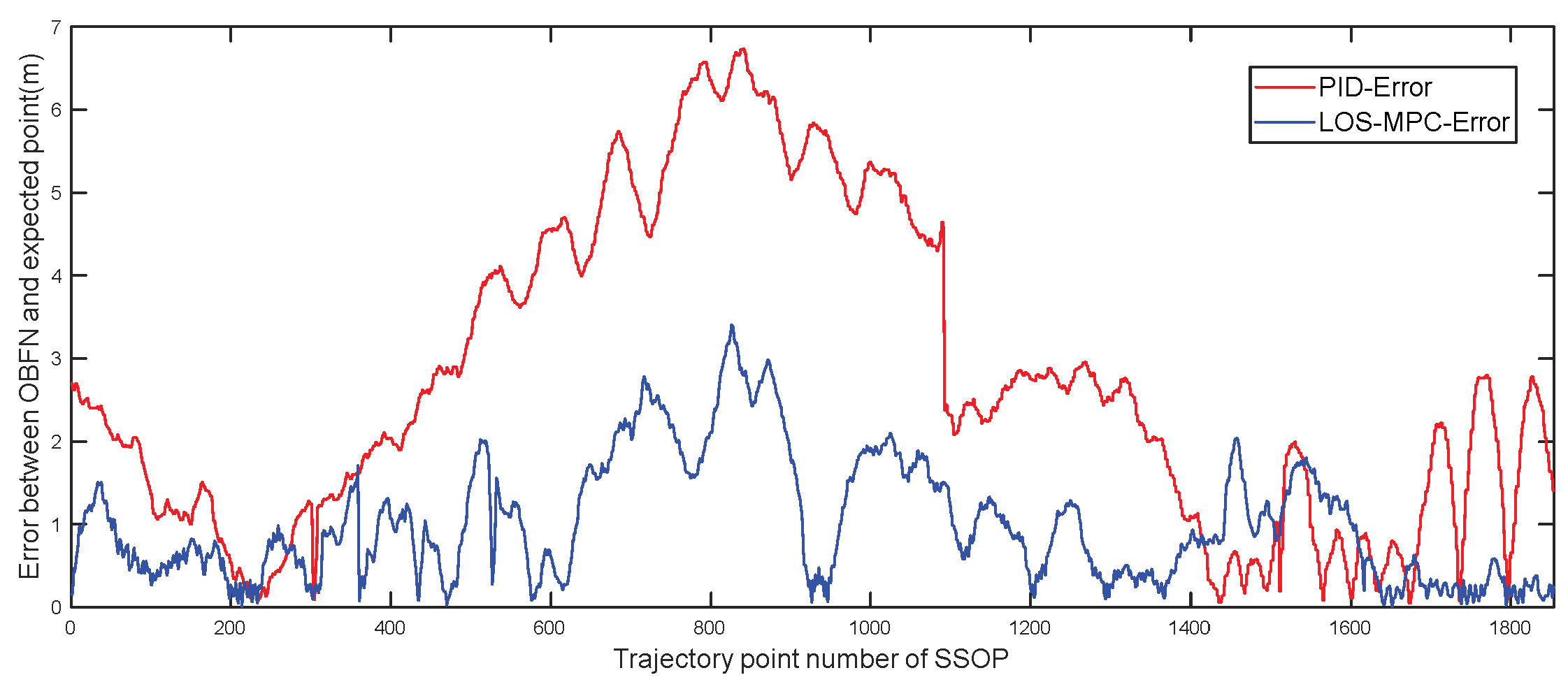
5.5. “8”-Type Path Following Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tang, Z.; Cao, X.; Zhou, Z.; Zhang, Z.; Xu, C.; Dou, J. Path Planning of Autonomous Underwater Vehicle in Unknown Environment Based on Improved Deep Reinforcement Learning. Ocean. Eng. 2024, 301, 117547. [Google Scholar] [CrossRef]
- Firat, E.; Shachak, P.; May-Win, T.; Yuri, R.; Barbaros, C.; Swift, M. Position, Orientation and Velocity Detection of Unmanned Underwater Vehicles (UUVs) Using an Optical Detector Array. Sensors 2017, 17, 1741. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Zhu, L.; Sun, G.; Qiao, J.; Guo, S. Underwater Motion Characteristics Evaluation of Multi Amphibious Spherical Robots. Microsyst. Technol. 2019, 25, 499–508. [Google Scholar]
- Du, S.; Wu, Z.; Yu, J. Design and Yaw Control of a Two-Motor-Actuated Biomimetic Robotic Fish. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 126–131. [Google Scholar]
- Wu, Z.; Yu, J.; Yuan, J.; Tan, M. Towards a Gliding Robotic Dolphin: Design, Modeling, and Experiments. IEEE/ASME Trans. Mechatron. 2019, 24, 260–270. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Wei, Q.; Tan, M.; Yu, J. A Bio-Inspired Robot With Undulatory Fins and Its Control Methods. IEEE/ASME Trans. Mechatron. 2017, 22, 206–216. [Google Scholar]
- Chen, Y.; Yuan, L.; Qin, L.; Zhang, N.; Li, L.; Wu, K.; Zhou, Z. A Forecasting Model with Hybrid Bidirectional Long Short-Term Memory for Mooring Line Responses of Semi-Submersible Offshore Platforms. Appl. Ocean. Res. 2024, 150, 104145. [Google Scholar] [CrossRef]
- Gu, H.; Chen, H.-C. Numerical Simulation of a Semi-Submersible FOWT Platform under Calibrated Extreme and Irregular Waves. Ocean. Eng. 2024, 311, 118847. [Google Scholar] [CrossRef]
- Degorre, L.; Fossen, T.I.; Delaleau, E.; Chocron, O. A Virtual Reference Point Kinematic Guidance Law for 3-D Path-Following of Autonomous Underwater Vehicles. IEEE Access 2024, 12, 109822–109831. [Google Scholar] [CrossRef]
- Jia, H.M.; Zhang, L.J.; Cheng, X.Q.; Bian, X.Q.; Zhou, J.J. Three-Dimensional Path Following Control for an Underactuated UUV Based on Nonlinear Iterative Sliding Mode. Acta Autom. Sin. 2012, 38, 308–314. [Google Scholar]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Trajectory Tracking Sliding Mode Control of Underactuated AUVs. Nonlinear Dyn. 2016, 84, 1079–1091. [Google Scholar]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal Sliding Mode Control for the Trajectory Tracking of Underactuated Autonomous Underwater Vehicles. Ocean. Eng. 2016, 129, S0029801816304759. [Google Scholar]
- Soylu, S.; Proctor, A.A.; Podhorodeski, R.P.; Bradley, C.; Buckham, B.J. Precise Trajectory Control for an Inspection Class ROV. Ocean. Eng. 2016, 111, 508–523. [Google Scholar]
- Soylu, S.; Buckham, B.J.; Podhorodeski, R.P. A Chattering-Free Sliding-Mode Controller for Underwater Vehicles with Fault-Tolerant Infinity-Norm Thrust Allocation. Ocean. Eng. 2008, 35, 1647–1659. [Google Scholar]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. An Efficient Neural Network Approach to Tracking Control of an Autonomous Surface Vehicle with Unknown Dynamics. Expert Syst. Appl. Int. J. 2013, 40, 1629–1635. [Google Scholar]
- Miao, B.; Li, T.; Luo, W. A DSC and MLP Based Robust Adaptive NN Tracking Control for Underwater Vehicle. Neurocomputing 2013, 111, 184–189. [Google Scholar] [CrossRef]
- Hu, Z.; Zhu, D.; Cui, C.; Sun, B. Trajectory Tracking and Re-Planning with Model Predictive Control of Autonomous Underwater Vehicles. J. Navig. 2018, 72, 321–341. [Google Scholar] [CrossRef]
- Sun, B.; Zhu, D.; Yang, S.X. A Bioinspired Filtered Backstepping Tracking Control of 7000-m Manned Submarine Vehicle. IEEE Trans. Ind. Electron. 2014, 61, 3682–3693. [Google Scholar]
- Liu, G.; Mo, C.; Wei, S.; Zhang, Y. Energy Consumption Optimization Strategy for Autonomous Underwater Vehicles Based on Model Prediction Control. In Proceedings of the 2024 IEEE 7th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 15–17 March 2024; Volume 7, pp. 17–21. [Google Scholar]
- Shen, C.; Shi, Y.; Buckham, B. Integrated Path Planning and Tracking Control of an AUV: A Unified Receding Horizon Optimization Approach. IEEE/ASME Trans. Mechatron. 2017, 22, 1163–1173. [Google Scholar]
- Shen, C.; Buckham, B.; Shi, Y. Modified C/GMRES Algorithm for Fast Nonlinear Model Predictive Tracking Control of AUVs. IEEE Trans. Control. Syst. Technol. 2016, 25, 1896–1904. [Google Scholar]
- Shen, C.; Shi, Y.; Buckham, B. Trajectory Tracking Control of an Autonomous Underwater Vehicle Using Lyapunov-Based Model Predictive Control. IEEE Trans. Ind. Electron. 2017, 65, 5796–5805. [Google Scholar]
- Shen, C.; Shi, Y. Distributed Implementation of Nonlinear Model Predictive Control for AUV Trajectory Tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Xue, Y.; Wang, X.; Liu, Y.; Xue, G. Real-Time Nonlinear Model Predictive Control of Unmanned Surface Vehicles for Trajectory Tracking and Collision Avoidance. In Proceedings of the 2021 7th International Conference on Mechatronics and Robotics Engineering, ICMRE 2021, Budapest, Hungary, 3–5 February 2021; pp. 150–155. [Google Scholar] [CrossRef]
- Bhat, S.; Panteli, C.; Stenius, I.; Dimarogonas, D.V. Nonlinear Model Predictive Control for Hydrobatics: Experiments with an Underactuated AUV. J. Field Robot. 2023, 40, 1840–1859. [Google Scholar] [CrossRef]
- Zhao, D.; Gao, S.; Spurgeon, S.K.; Reichhartinger, M. Adaptive Sliding Mode Dynamic Positioning Control for a Semi-Submersible Offshore Platform. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; IEEE: Naples, Italy, 2019; pp. 3103–3108. [Google Scholar]
- Kang, S.; Yu, J.; Zhang, J.; Hu, F.; Jin, Q. Research on Accurate Modeling of Hydrodynamic Interaction Forces on AUVs Operating in Tandem. Ocean. Eng. 2022, 251, 111125. [Google Scholar] [CrossRef]
- Sajedi, Y.; Bozorg, M. Robust Estimation of Hydrodynamic Coefficients of an AUV Using Kalman and H∞ Filters. Ocean. Eng. 2019, 182, 386–394. [Google Scholar] [CrossRef]
- Valluru, S.K.; Thareia, H. Maneuvering Control of Autonomous Underwater Vehicle (AUV) by Simulated Annealing and Moth Flame Optimization Tuned Controllers. In Proceedings of the 2022 International Conference on Electronic Systems and Intelligent Computing (ICESIC), Chennai, India, 22–23 April 2022; pp. 223–228. [Google Scholar]
- Källström, C.G. Guidance and Control of Ocean Vehicles; Fossen, T.I., Ed.; Wiley: Chichester, UK, 1996; Volume 32, p. 1235. ISBN 0-471-94113-1. [Google Scholar] [CrossRef]
- Du, P.; Ouahsine, A.; Toan, K.T.; Sergent, P. Simulation of Ship Maneuvering in a Confined Waterway Using a Nonlinear Model Based on Optimization Techniques. Ocean. Eng. 2017, 142, 194–203. [Google Scholar] [CrossRef]
- Tran Khanh, T.; Ouahsine, A.; Naceur, H.; El Wassifi, K. Assessment of Ship Manoeuvrability by Using a Coupling between a Nonlinear Transient Manoeuvring Model and Mathematical Programming Techniques. J. Hydrodyn. 2013, 25, 788–804. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, Y.; Yang, X.; Luo, Z. Transfer Function Model Identification Based on Improved Least Square Method. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 487–491. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters |
|---|---|
| Dimensions | Antenna rising: 5900 mm × 550 mm × 6587 mm (L × W × H) Antenna collapse: 5900 mm × 550 mm × 1472 mm (L × W × H) |
| Weight (in air) | 920 kg |
| Max.Depth | 10 m |
| Navigation time | 40 h@3 knots/12 h@6 knots |
| Max.Speed | 6 knots |
| Localization Accuracy | The error is less than 3‰ of the voyage (Under the absolute velocity calculation) |
| Loading capacity | ≥100 kg |
| Turning radius | <20 m |
| Operating sea conditions | ≤level 4 |
| Communication | WiFi—100 m; Digital transmission station—15 km; 4G—the sea area covered by the base station; BDS—inside the Second Island Chain. |
| Experiment Condition | PID | LOS-MPC | |
|---|---|---|---|
| Mean position error (m) | Beaufort 4 Wave height: 1 m | 2.6362 | 1.0868 |
| Max position error (m) | 6.7288 | 3.4039 | |
| Min position error (m) | 0.0469 | 0.0071 | |
| MSE (m) | 10.1506 | 1.7316 | |
| RMSE (m) | 3.1860 | 1.3159 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Ye, X.; Zhang, R.; Luo, M. An Improved Real-Time LOS-Based Model Predictive Control for the Semi-Submersible Offshore Platform Under Ocean Disturbances. J. Mar. Sci. Eng. 2025, 13, 725. https://doi.org/10.3390/jmse13040725
Wang S, Ye X, Zhang R, Luo M. An Improved Real-Time LOS-Based Model Predictive Control for the Semi-Submersible Offshore Platform Under Ocean Disturbances. Journal of Marine Science and Engineering. 2025; 13(4):725. https://doi.org/10.3390/jmse13040725
Chicago/Turabian StyleWang, Shunli, Xiufen Ye, Ronghao Zhang, and Meng Luo. 2025. "An Improved Real-Time LOS-Based Model Predictive Control for the Semi-Submersible Offshore Platform Under Ocean Disturbances" Journal of Marine Science and Engineering 13, no. 4: 725. https://doi.org/10.3390/jmse13040725
APA StyleWang, S., Ye, X., Zhang, R., & Luo, M. (2025). An Improved Real-Time LOS-Based Model Predictive Control for the Semi-Submersible Offshore Platform Under Ocean Disturbances. Journal of Marine Science and Engineering, 13(4), 725. https://doi.org/10.3390/jmse13040725