

Design and Control of a Novel Steer-by-Wire System for Marine Vessels


Abstract
1. Introduction
- The design of a SBW system for marine vessels, suitable for operation in harsh maritime environments.
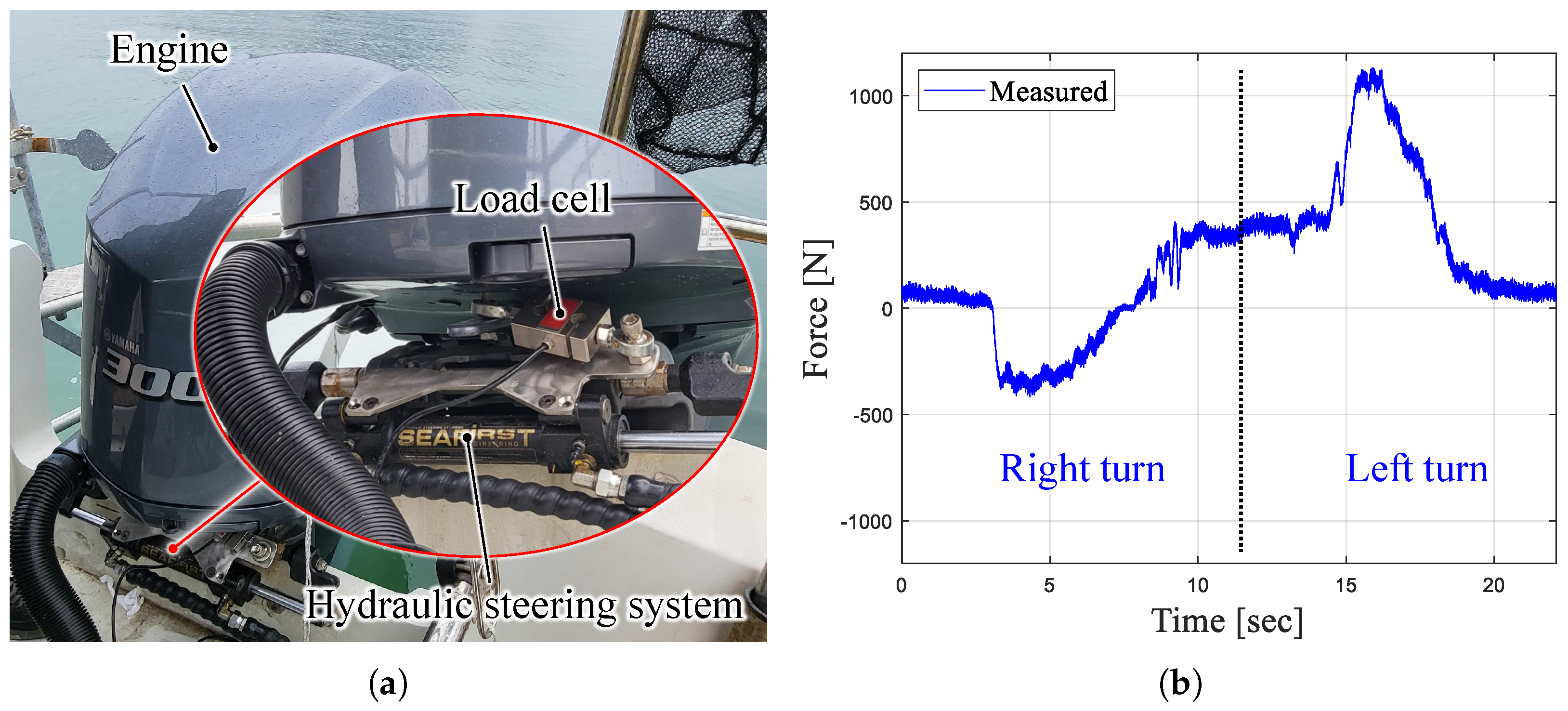
- An experimental analysis of the thrust requirements for engine direction control in real maritime environments.
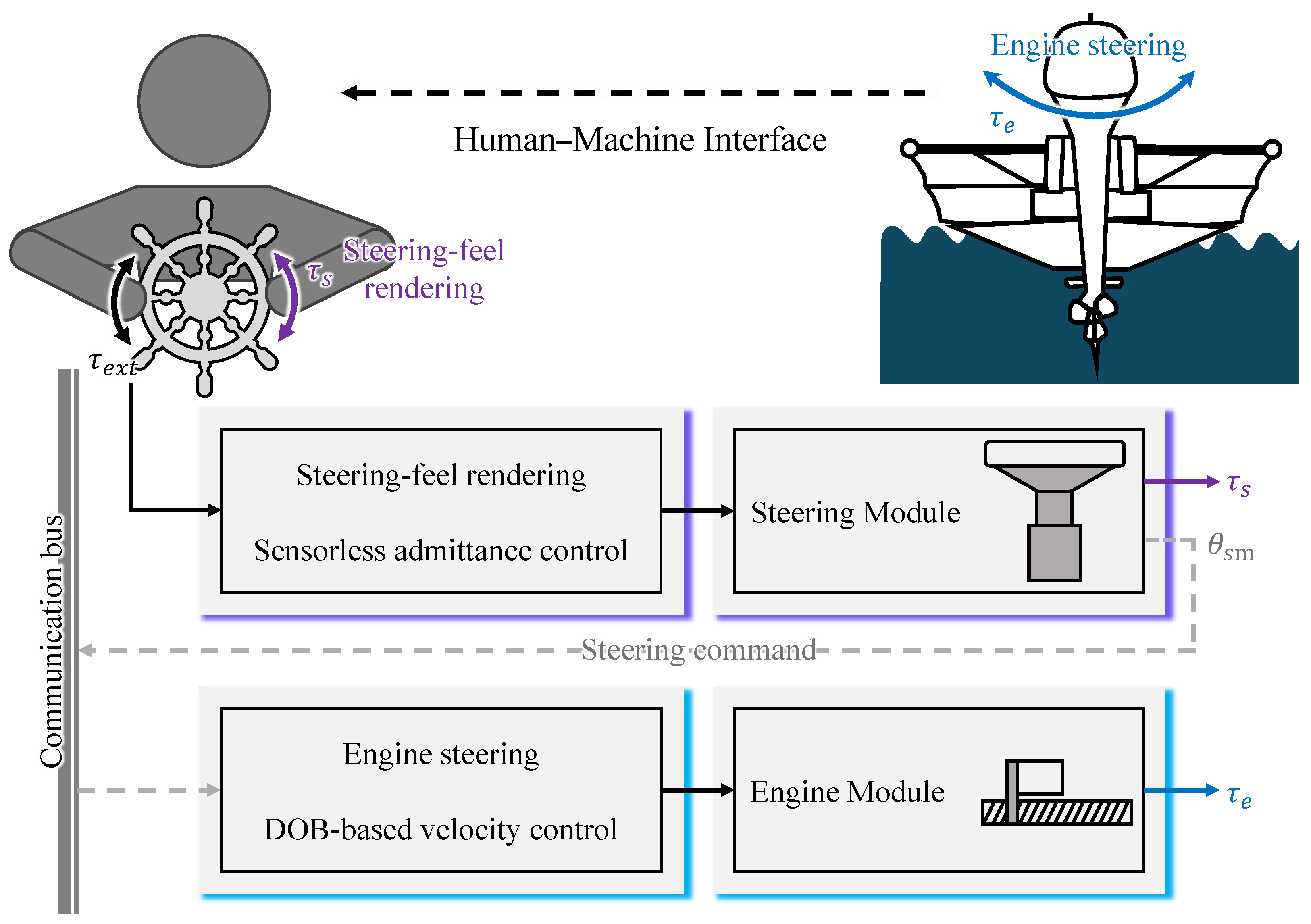
- The application of a DOB-based steering control algorithm and a sensorless admittance control-based steering-feel rendering algorithm in the SBW system.
2. Design of a SBW System for Marine Vessels
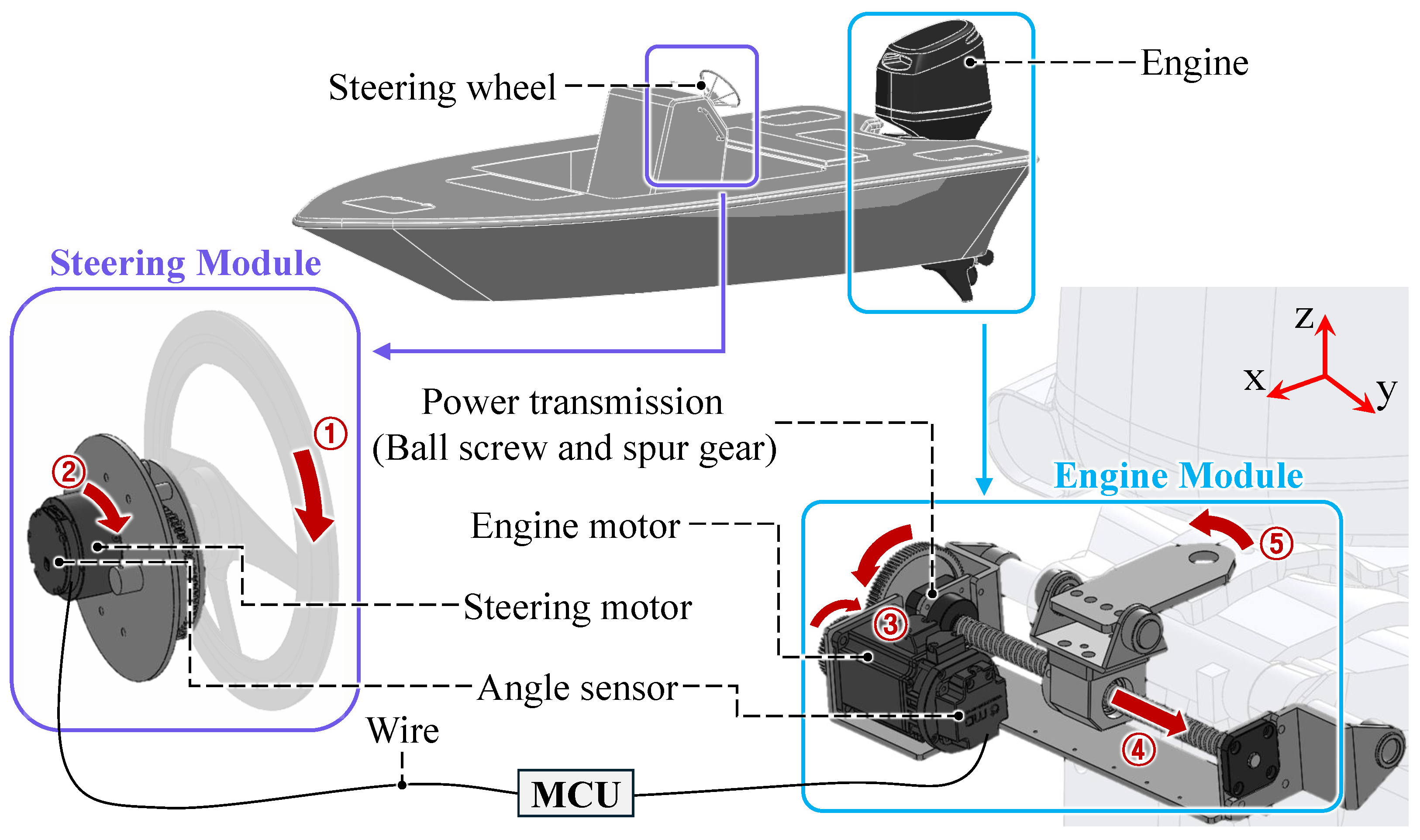
2.1. Overall Architecture of the SBW System for Marine Vessels
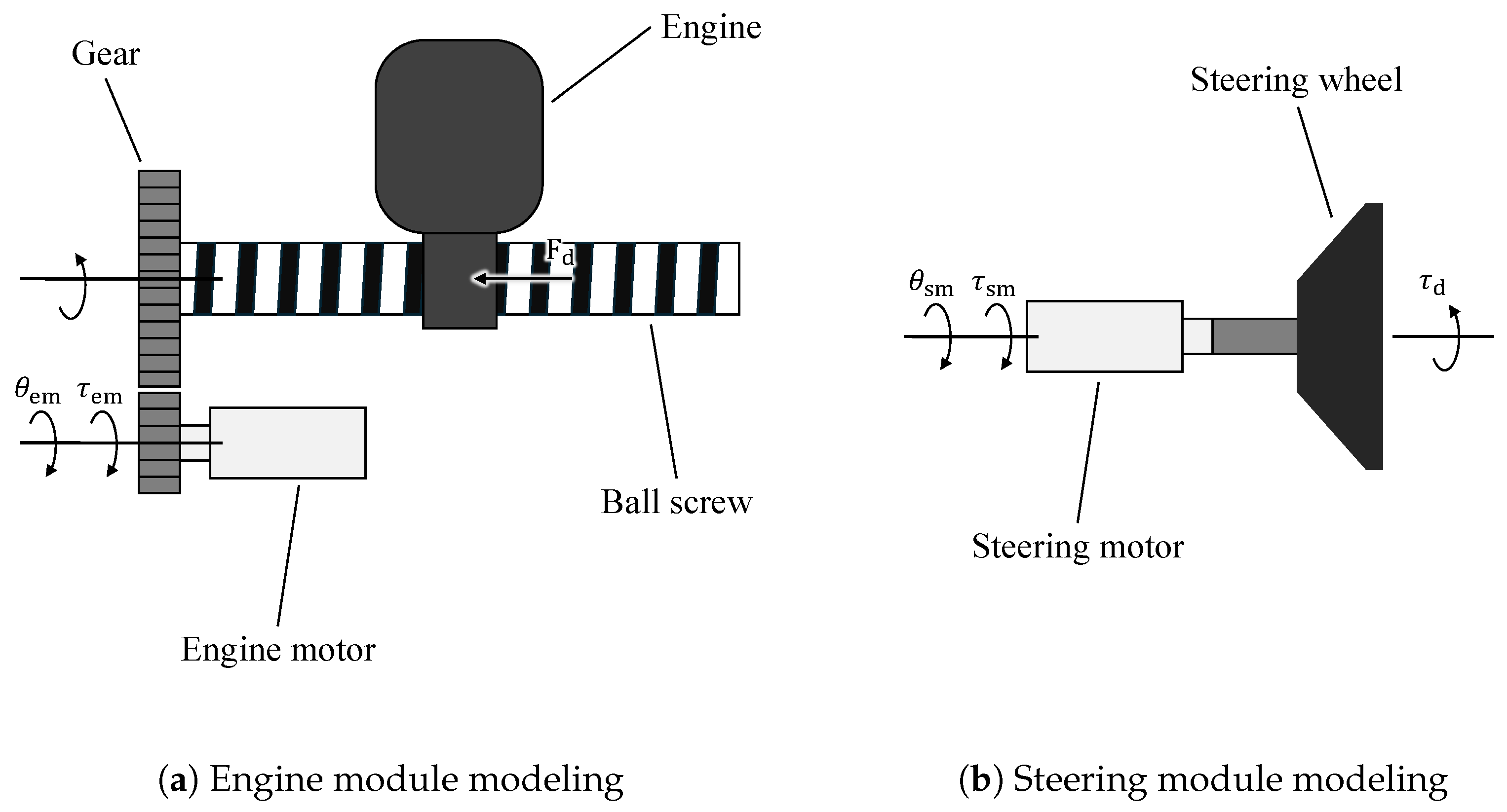
- Engine module: This module consists of the components on the right side and executes control signals to adjust the engine direction, aligning it with the steering command.
- Steering module: This module consists of the components on the left side and processes control signals to render steering feel for the operator. It also makes steering commands in direct response to operator inputs.
2.2. Engine Module
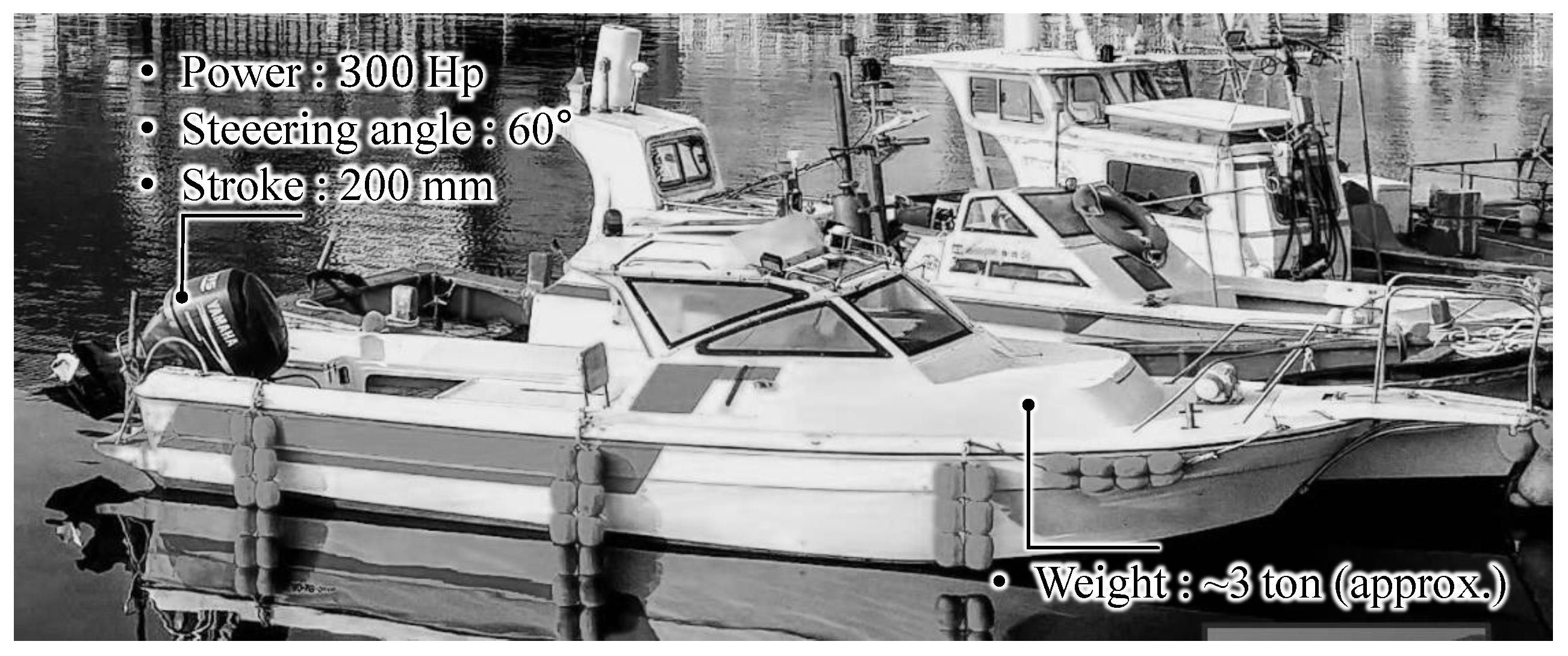
2.3. Thrust Required for Engine Steering
2.4. Steering Module
2.5. Prototype of the SBW System for Marine Vessels
3. Control Algorithm Design of the SBW System for Marine Vessels
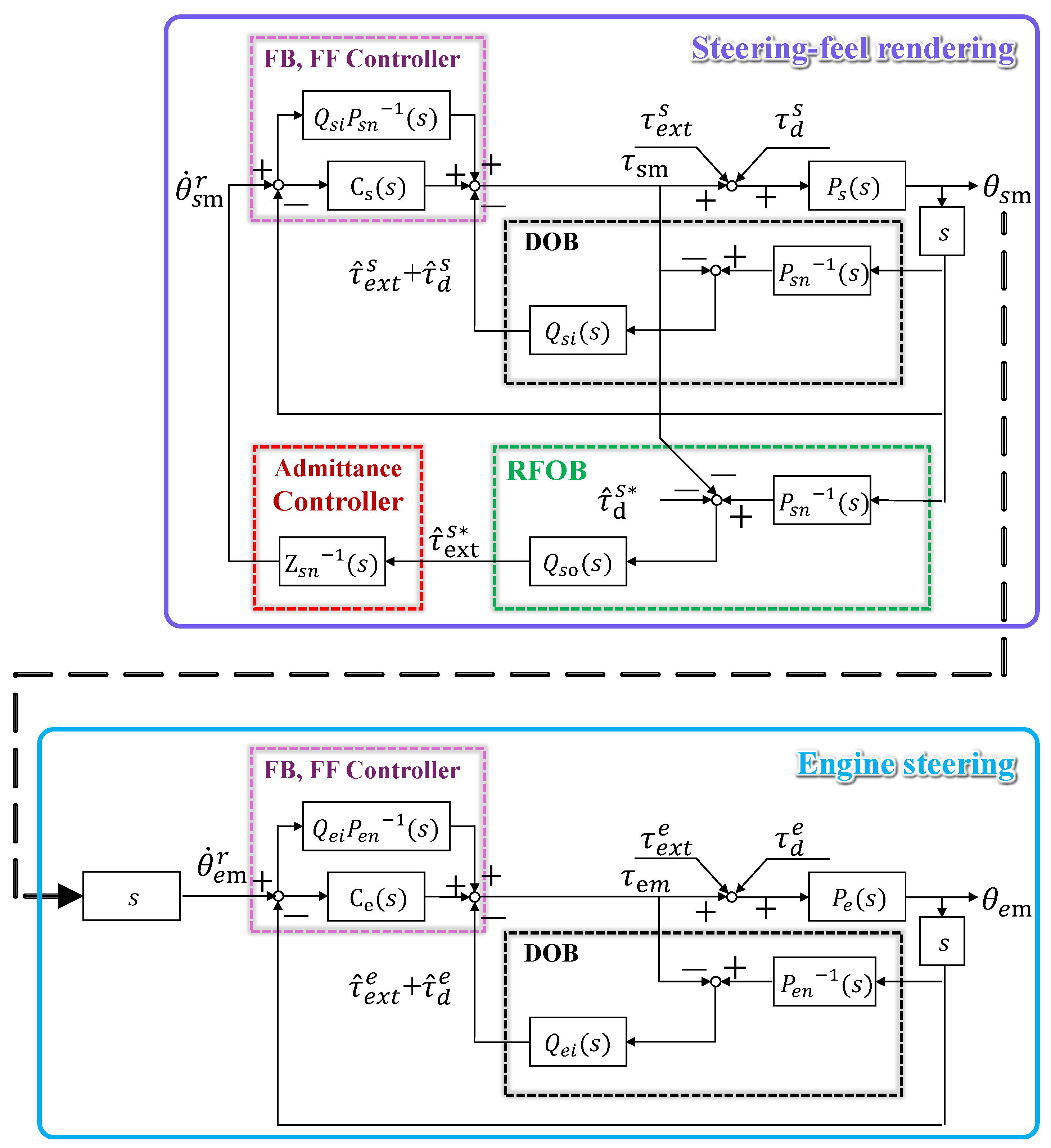
3.1. Overall Control Structure of the SBW System for Marine Vessels
3.2. DOB-Based Velocity Control for Engine Steering
3.3. Admittance Control for Steering-Feel Rendering
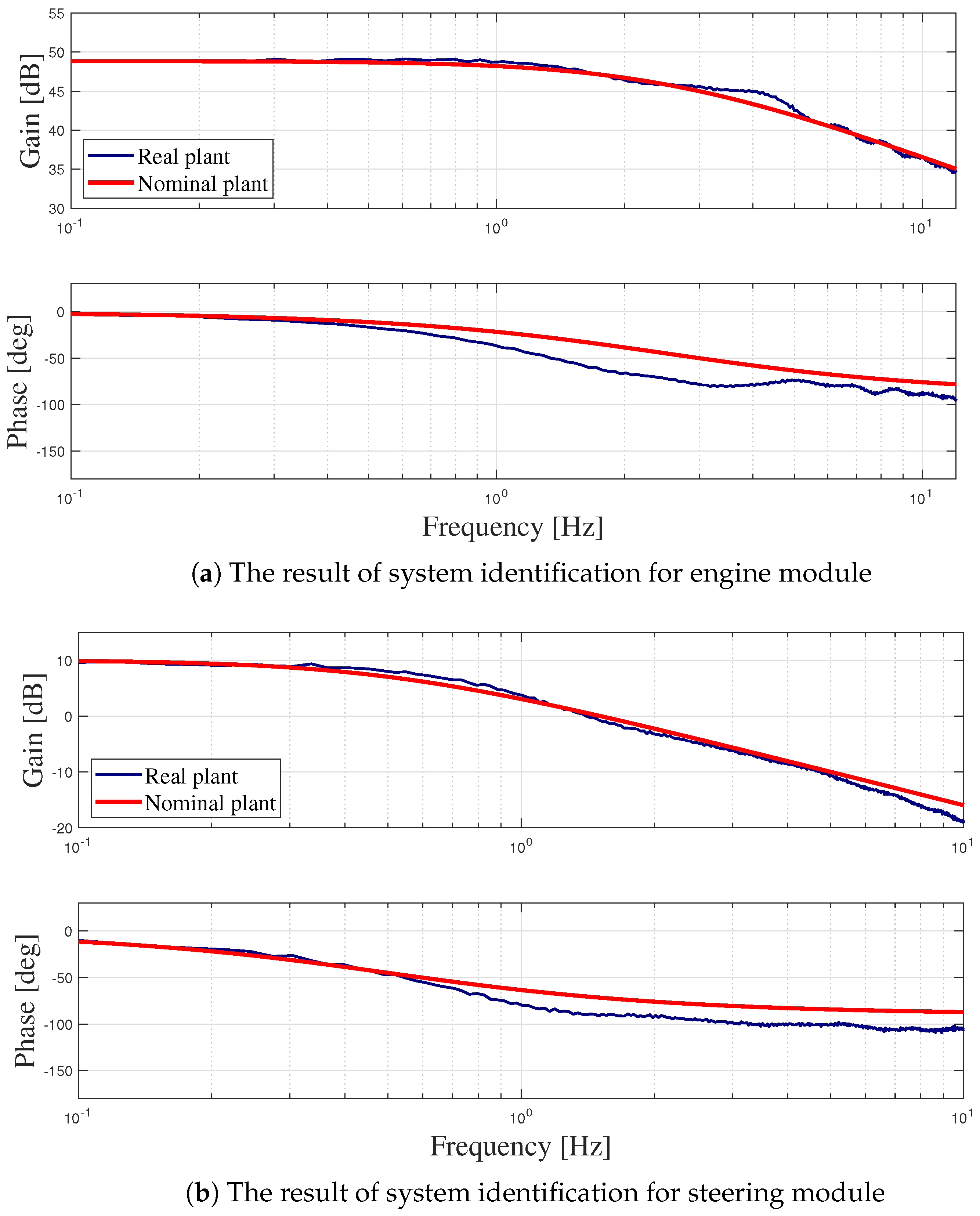
3.4. System Modeling of the SBW System for Marine Vessels
4. Experiment
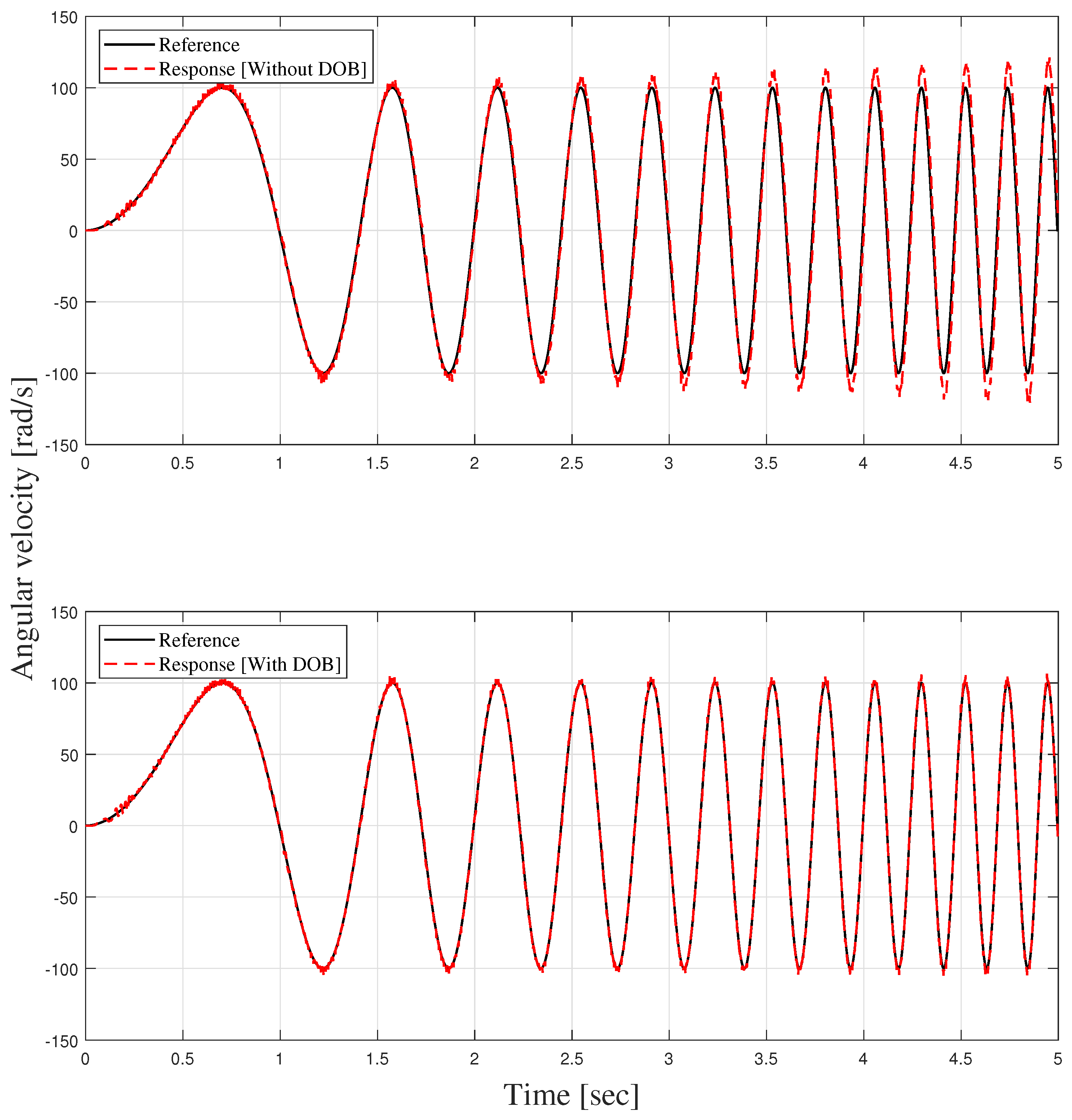
4.1. Speed Tracking Analysis Using DOB-Based Velocity Controller
4.2. Steering-Feel Rendering Analysis Using Admittance Controller
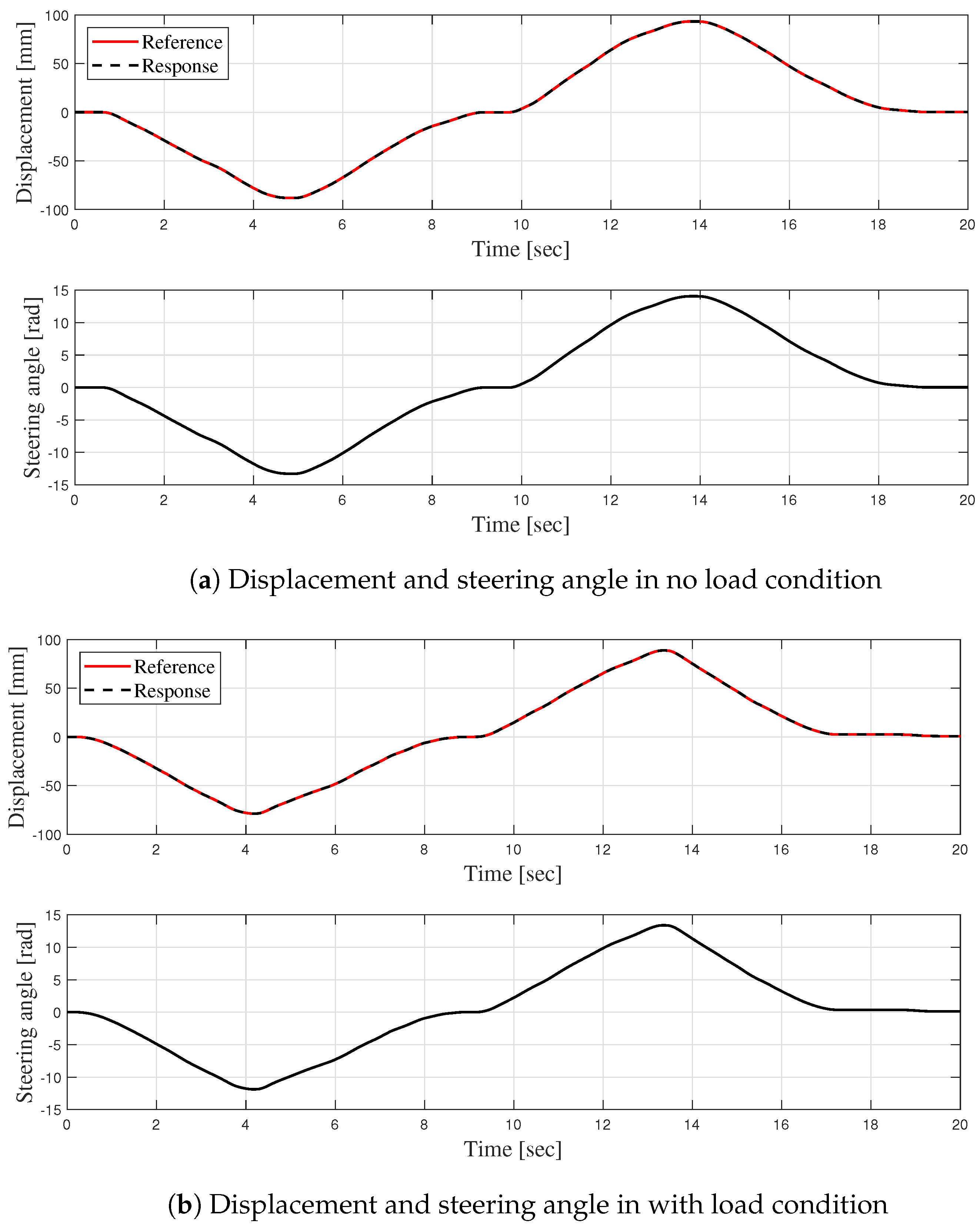
4.3. Steering Performance Analysis of the SBW System for Marine Vessels
5. Conclusions
5.1. Summary
5.2. Discussion
5.3. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Karanović, V.; Ceylan, B.O.; Jocanović, M. Reliable Ships: A Fuzzy FMEA-Based Risk Analysis on Four-Ram Type Hydraulic Steering System. Ocean Eng. 2024, 314, 119758. [Google Scholar] [CrossRef]
- Rao, G.G.; Pasumarthi, M.R. Development of Modern Electrical Steering Gear System on Board Ships with Autopilot. Int. Res. J. Eng. Technol. 2019, 6, 2846–2850. [Google Scholar]
- Kumar, P.; Park, S.; Zhang, Y.; Jo, S.H.; Kim, H.S.; Kim, T. A Review of Hydraulic Cylinder Faults, Diagnostics, and Prognostics. Int. J. Precis. Eng. Manuf.-Green Tech. 2024, 11, 1637–1661. [Google Scholar] [CrossRef]
- Mortazavizadeh, S.A.; Ghaderi, A.; Ebrahimi, M.; Hajian, M. Recent Developments in the Vehicle Steer-by-Wire System. IEEE Transp. Electrif. 2020, 6, 1226–1235. [Google Scholar] [CrossRef]
- Wang, W.; Chen, X.; Wang, J. Motor/Generator Applications in Electrified Vehicle Chassis—A Survey. IEEE Transp. Electrif. 2019, 5, 584–601. [Google Scholar] [CrossRef]
- Sung, J.; Choi, S.; Huh, K. A Differential Brake-Actuated Steering System for Redundancy of Steer-by-Wire. IEEE Intell. Veh. 2024, 9, 993–1004. [Google Scholar] [CrossRef]
- Fahami, S.M.H.; Zanzuri, H.; Mazlan, H.; Saiful, A.; Zulkarnain; Noraishikin, B. The Design of Vehicle Active Front Steering Based on Steer by Wire System. Adv. Sci. Lett. 2013, 19, 61–65. [Google Scholar] [CrossRef]
- Robert Bosch GmbH (Ed.) Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid Drive; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Hoseinnezhad, R.; Bab-Hadiashar, A. Missing Data Compensation for Safety-Critical Components in a Drive-by-Wire System. IEEE Trans. Veh. Technol. 2005, 54, 1304–1311. [Google Scholar] [CrossRef]
- Bruzzese, C. A high absolute thrust permanent magnet linear actuator for direct drive of ship’s steering gears: Concept and FEM analysis. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 556–562. [Google Scholar] [CrossRef]
- Bruzzese, C.; Rafiei, M.; Teodori, S.; Santini, E.; Mazzuca, T.; Lipardi, G. Electrical, Mechanical and Thermal Design by Multiphysics Simulations of a Permanent Magnet Linear Actuator for Ship Rudder Direct Drive. In Proceedings of the 2017 AEIT International Annual Conference, Cagliari, Italy, 20–22 September 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Bruzzese, C.; Ruggeri, E.; Rafiei, M.; Zito, D.; Santini, E.; Mazzuca, T. Mechanical Arrangements Onboard Ship of Innovative Permanent Magnet Linear Actuators for Steering Gear. In Proceedings of the 2017 International Symposium on Power Electronics (Ee), Novi Sad, Serbia, 19–21 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Mazzuca, T.; Bruzzese, C. Project “ISO”: Innovative Solutions for Italian Navy’s Onboard Full-Electric Actuators. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion (ESARS), Bologna, Italy, 16–18 October 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Hemsen, J.; Nowak, N.; Eckstein, L. Production Cost Modeling for Permanent Magnet Synchronous Machines for Electric Vehicles. Automot. Engine Technol. 2023, 8, 109–126. [Google Scholar] [CrossRef]
- Ruiz-Ponce, G.; Arjona, M.A.; Hernandez, C.; Escarela-Perez, R. A Review of Magnetic Gear Technologies Used in Mechanical Power Transmission. Energies 2023, 16, 1721. [Google Scholar] [CrossRef]
- Lee, J.; Chang, S.; Kim, K.; Jang, B.; Lee, D.; Lee, B.; Yi, K. Steering Wheel Torque Control of Steer-by-Wire System for Steering Feel; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Oh, S.-W.; Chae, H.-C.; Yun, S.-C.; Han, C.-S. The Design of a Controller for the Steer-by-Wire System. JSME Int. J. Ser. Mech. Syst. Mach. Elem. Manuf. 2004, 47, 896–907. [Google Scholar] [CrossRef]
- Cheon, D.S.; Nam, K.H. Steering Torque Control Using Variable Impedance Models for a Steer-by-Wire System. Int. J. Automot. Technol. 2017, 18, 263–270. [Google Scholar] [CrossRef]
- Im, J.S.; Ozaki, F.; Matsunaga, M.; Kawaji, S. Design of Steer-by-Wire System with Bilateral Control Method Using Disturbance Observer. In Proceedings of the 2007 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 4–7 September 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Kopczynski, T.; Ness, D. Five Factors That Can Affect Your Weighing System’s Accuracy. Powder Bulk Eng. 2001, 15, 31–37. [Google Scholar]
- Onoda, Y.; Onuma, Y.; Goto, T.; Sugitani, T. Design Concept and Advantages of Steer-by-Wire System; SAE Technical Paper 2008-01-0493; SAE International: Warrendale, PA, USA, 2008. [Google Scholar] [CrossRef]
- Haus, R. Converting Rotary Motion to Linear Motion. Power Convers. Intell. Motion 1996, 22, 72–74. [Google Scholar]
- Komada, S.; Ishida, M.; Ohnishi, K.; Hori, T. Disturbance Observer-Based Motion Control of Direct Drive Motors. IEEE Trans. Energy Convers. 1991, 6, 553–559. [Google Scholar] [CrossRef]
- Kempf, C.J.; Kobayashi, S. Disturbance Observer and Feedforward Design for a High-Speed Direct-Drive Positioning Table. IEEE Trans. Control Syst. Technol. 1999, 7, 513–526. [Google Scholar] [CrossRef]
- Oh, S.; Kong, K.; Hori, Y. Design and Analysis of Force-Sensor-Less Power-Assist Control. IEEE Trans. Ind. Electron. 2014, 61, 985–993. [Google Scholar] [CrossRef]
- Kalinowska, A.; Schlafly, M.; Rudy, K.; Dewald, J.P.; Murphey, T.D. Measuring Interaction Bandwidth During Physical Human-Robot Collaboration. IEEE Robot. Autom. Lett. 2022, 7, 12467–12474. [Google Scholar] [CrossRef]
- Akers, A.; Gassman, M.; Smith, R. Hydraulic Power System Analysis; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Tang, X.; Wu, C.; Xu, X. Learning-Based Nonlinear Model Predictive Controller for Hydraulic Cylinder Control of Ship Steering System. J. Mar. Sci. Eng. 2022, 10, 2033. [Google Scholar] [CrossRef]
- Bruzzese, C.; Tessarolo, A.; Mazzuca, T.; Scala, G. A Closer Look to Conventional Hydraulic Ship Actuator Systems and the Convenience of Shifting to (Possibly) All-Electric Drives. IEEE Electr. Ship Technol. Symp. (ESTS) 2013, 2013, 220–227. [Google Scholar] [CrossRef]
- Huang, S.-J.; Wang, S.-S. Mechatronics and Control of a Long-Range Nanometer Positioning Servomechanism. Mechatronics 2009, 19, 14–28. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Without DOB | With DOB | |
|---|---|---|
| Relative RMS error | 0.1189 | 0.0222 |
| Condition | RMS Error |
|---|---|
| No load | 0.0222 [mm] |
| With load | 0.0307 [mm] |
| Steering Systems for Marine Vessels | |||
|---|---|---|---|
| Hydraulic | Electronic | ||
| Mechanisms | Linear cylinder [2,27,28] | Linear motor [10,11,12,29] | Linear actuation with ball screw [15,22,30] |
| Advantages |
|
|
|
| Disadvantages |
|
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Lee, C. Design and Control of a Novel Steer-by-Wire System for Marine Vessels. J. Mar. Sci. Eng. 2025, 13, 582. https://doi.org/10.3390/jmse13030582
Kim D, Lee C. Design and Control of a Novel Steer-by-Wire System for Marine Vessels. Journal of Marine Science and Engineering. 2025; 13(3):582. https://doi.org/10.3390/jmse13030582
Chicago/Turabian StyleKim, Deokgyu, and Chan Lee. 2025. "Design and Control of a Novel Steer-by-Wire System for Marine Vessels" Journal of Marine Science and Engineering 13, no. 3: 582. https://doi.org/10.3390/jmse13030582
APA StyleKim, D., & Lee, C. (2025). Design and Control of a Novel Steer-by-Wire System for Marine Vessels. Journal of Marine Science and Engineering, 13(3), 582. https://doi.org/10.3390/jmse13030582