2.2.1. Principle of Tidal Energy Drive
Zang [
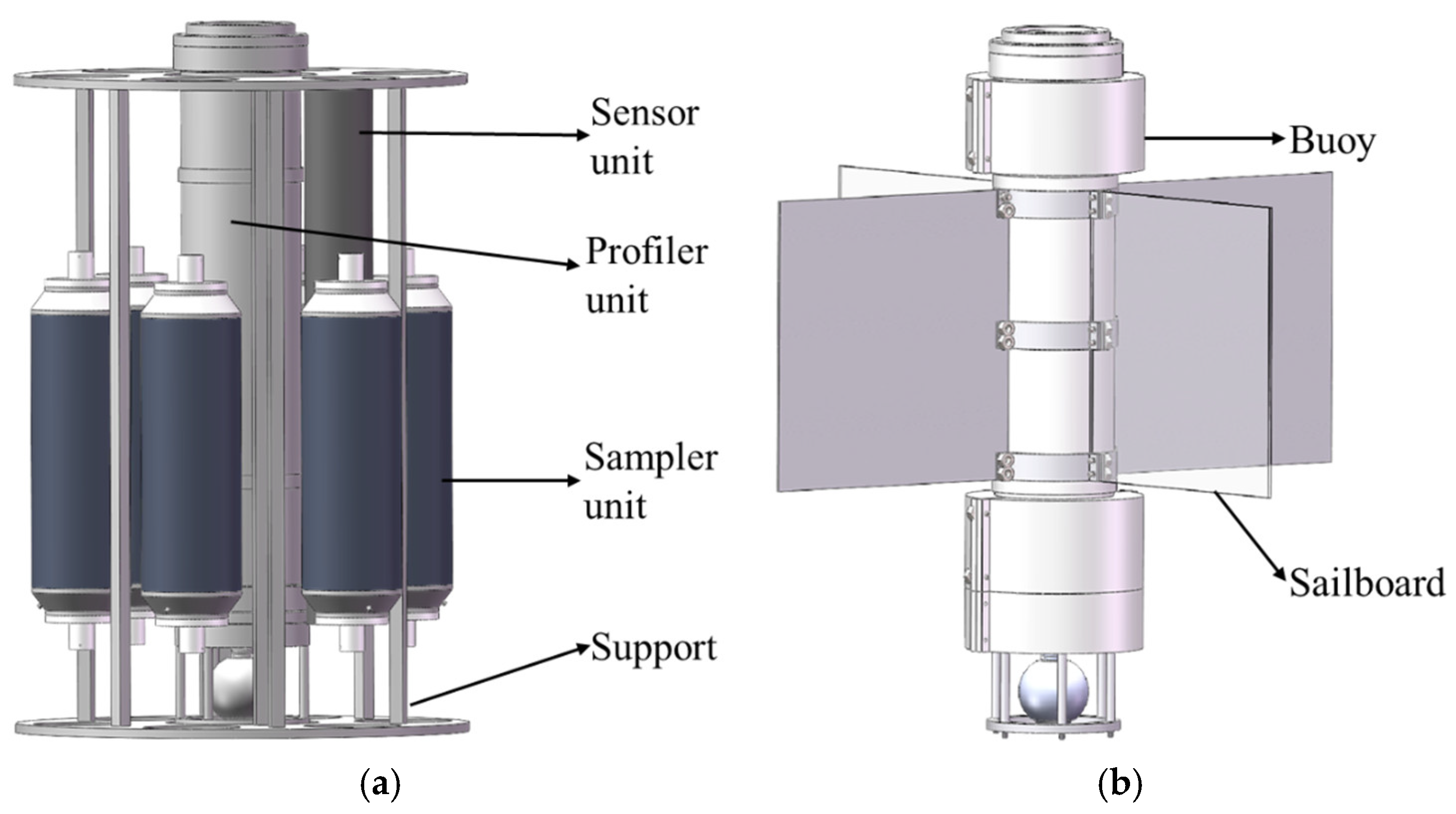
18] previously validated the principle of tidal energy-driven systems through simulation analysis of a simplified model of a buoy with a cross-shaped sail. In this study, we further simplified Zang’s model and conducted static analysis and numerical simulations based on the specific structure of our system and its practical operating conditions in the marine environment. These analyses and simulations provide theoretical guidance for subsequent field deployment experiments.
Figure 2 shows the simplified model and force analysis of the autonomous ocean observation system. The length between point O and B is
and the angle between OB and the horizontal plane is
. OA is the central axis of the system, the vertical distance between point O and B is
, and the angle between OA and the horizontal plane is
. The height of the windsurfing board is
.
represents the approach velocity of the horizontal current. The fluid density is
ρ. The
and
are the system’s buoyancy and gravity,
and
are the drag and lift of the flow around the system, and
is the rope’s pull om the system.
In the horizontal direction and vertical direction, the force balance formula of the system is shown in Equations (1) and (2).
Solving Equations (1) and (2),
can be expressed by Equation (3).
Therefore, the theoretical vertical distance
H can be expressed as Equation (4)
Around point O, the torque balance equation is shown in Equation (5).
Equation (5) is rewritten as:
It can be seen from Equation (4) that to calculate the depth of the system in the water,
and
must be solved first. The values of
and
are influenced by the status of the system in the fluid (e.g.,
) and the velocity of the horizontal current (
V). Defining that the right side of Equation (6) is equal to
, as in Equation (7),
can be calculated as a constant after the system parameters are determined.
Zang [
18] used numerical simulation to study the flow field around the cross-plant to determine
and
. According to Zang’s conclusion, as
increases,
decreases. Therefore, under ideal conditions,
Figure 3 describes the system’s movement pattern in the water. When
nears zero, buoyancy causes the system to reach its highest point, as depicted in position I. With increasing
, the system deviates from vertical and rotates counterclockwise around point B. If the current velocity is large enough and the system is adequately designed, it will eventually swing near the water body’s bottom, similar to position IV. Conversely, if the tidal current speed slows to zero, the system rotates clockwise to its original position I, ascending to its highest point. Thus, the system can oscillate vertically. Because of the power flow’s periodicity, the system’s movement is also periodic, enabling the profile measuring platform to cycle autonomously.
This study simulates the system’s flow field in an actual sea area and analyzes the relationship between H and V. The primary goal of developing the numerical model in this study was to establish a clear relationship between V and H in the water column. This relationship is crucial for understanding how the system’s vertical movement is influenced by tidal forces, which directly impacts its ability to perform continuous, multidimensional monitoring in marine environments. By simulating the system’s behavior under varying tidal conditions, we aimed to provide a theoretical foundation for the system’s deployment in actual sea trials, ensuring that it can achieve the desired profiling depths.
The numerical simulations were conducted to analyze the forces acting on the system, including , , , and . These forces were used to derive the theoretical vertical distance (H) as a function of tidal current velocity (V), as expressed in Equation (4):
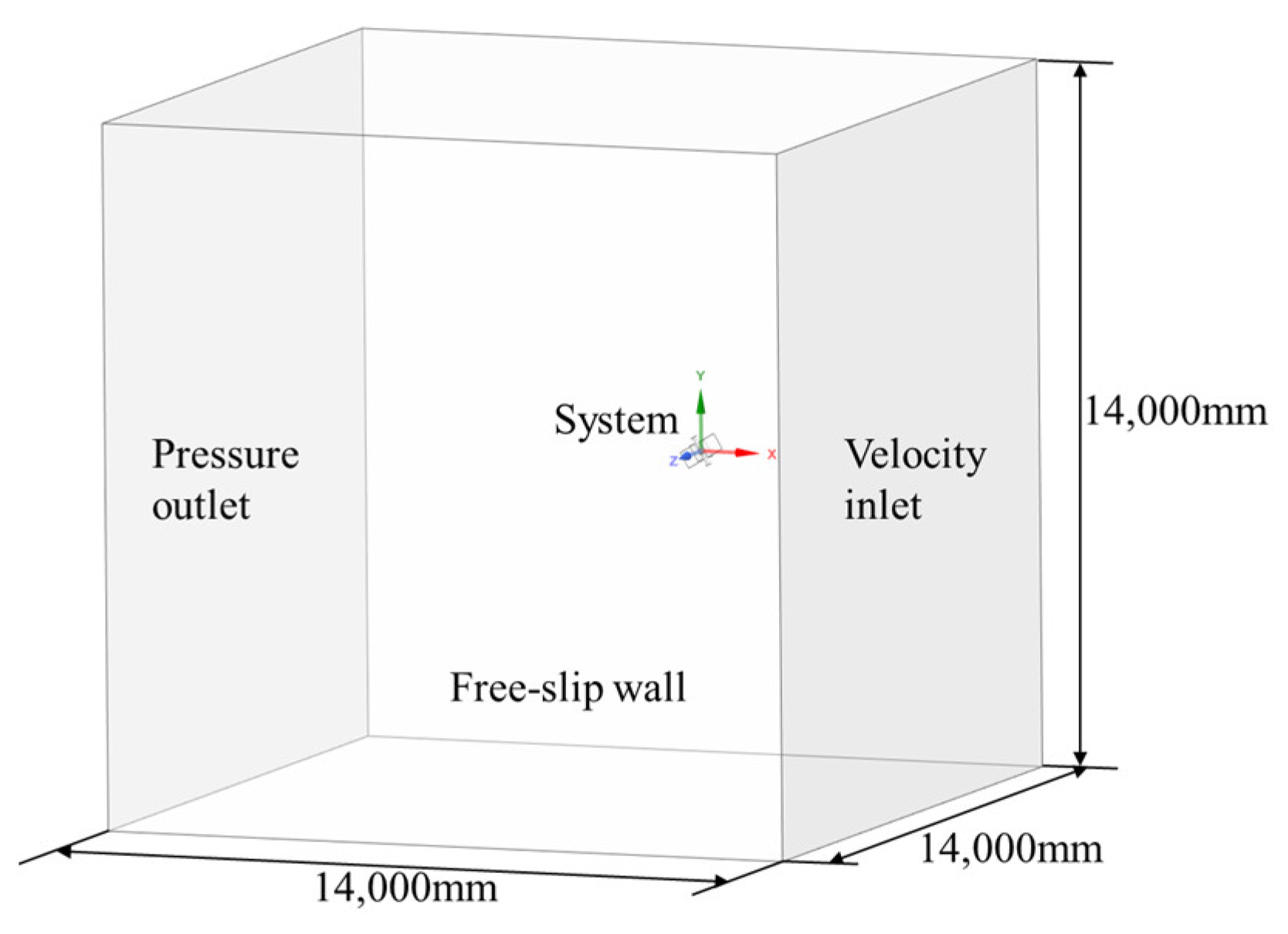
Preprocessing involves geometric model drawing, boundary condition definition, grid generation, and solver establishment. SpaceClaim (Version 2020 R2) was utilized for geometric simulation in a Cartesian coordinate system, with the origin set at the system’s center, as shown in
Figure 4. The sailboard dimensions are set to 350 mm × 350 mm, the central bin height is 618 mm, the outer diameter is 132 mm, and the angle between the central axis and the X-axis can vary between 40° and 88°. The calculation domain is about 20 times the system’s feature length, measuring about 14,000 mm × 14,000 mm × 14,000 mm. Along the X-axis, the system center is positioned about 4400 mm from the entrance, and along the Y and Z axes, it is symmetrical about the interface on both sides. A 1000 mm × 1000 mm × 1000 mm cube around the system center serves as the mesh refinement area for higher quality mesh generation. The right boundary of the calculation domain is set as the velocity inlet, the left as the pressure outlet, and the other boundaries as free sliding walls. Fluent (Version 2020 R2) was utilized to generate the mesh, solving for the system’s resistance and buoyancy at varying inclination angles and ocean flow rates.
In the solution, gravity along the Y-axis is set to −9.81 m/s2. The Reynolds number of the flow field around the system’s cross sail is between 8.517 × 103 and 1.965 × 104, indicating turbulence as the main factor. Thus, the k-epsilon model is chosen. The cell area contains liquid water with a density of 1020 kg/m3. Resistance and lift force are calculated by varying the inlet velocity corresponding to different flow velocities.
To ensure the accuracy of the solution, the grid independence of the model was verified. Five models with varying grid numbers, as shown in
Table 2, were assessed by solving
and
at
60° and
0.1 m/s.
Table 2 shows no significant differences in solution results among the models with different grid numbers. For subsequent calculations in this study, the grid count was set to approximately 2 million.
Resistance and lift force are solved separately for different tidal flow velocities and incidence angles, resulting in data shown in
Table 3, where
is calculated using Equation (7).
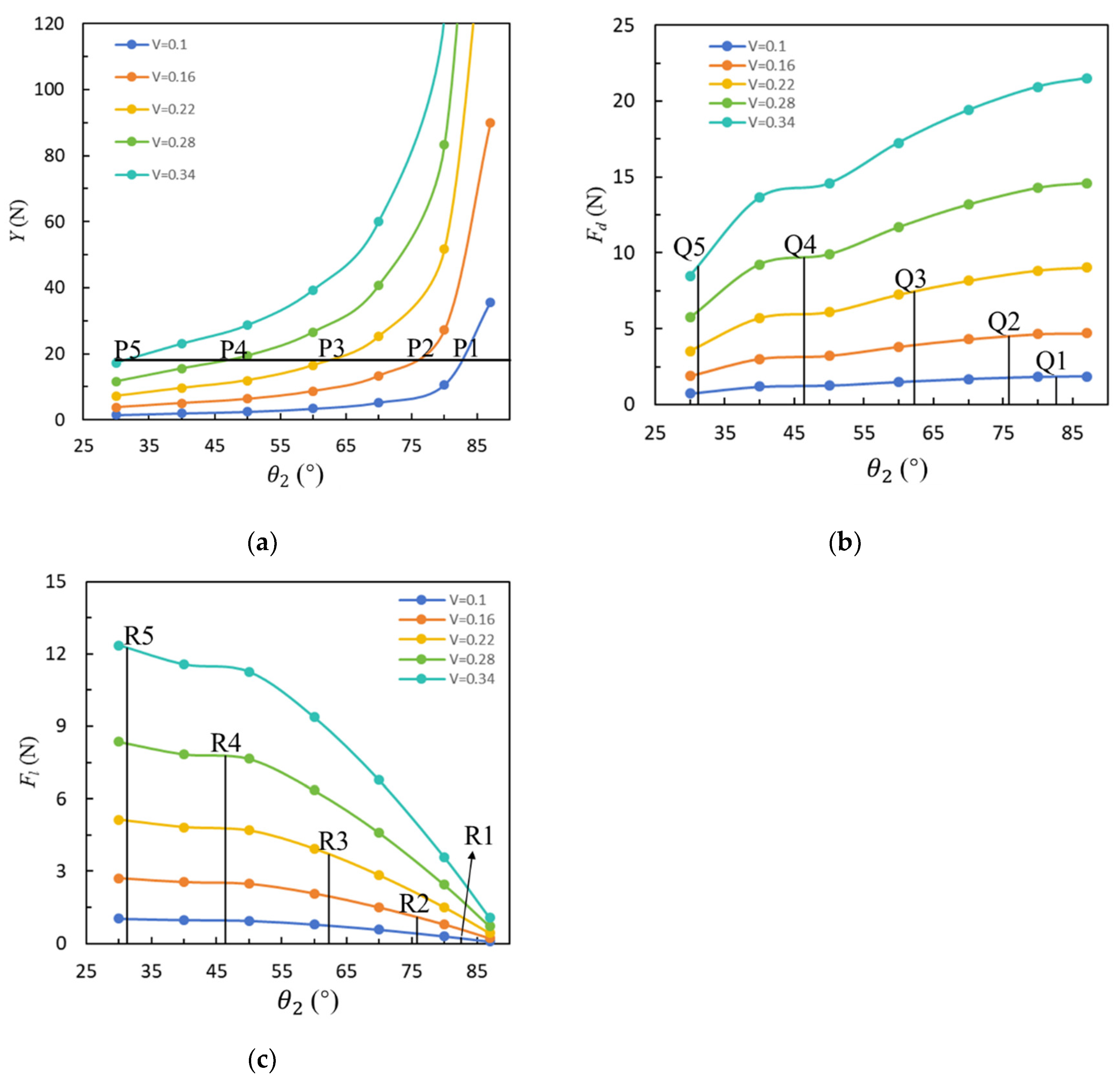
Based on the data in
Table 3,
Figure 5 can be drawn, which illustrates the relationship between
,
, and
at various values of
and
.
To enhance tidal current energy conversion efficiency, the profiler is designed to achieve weak buoyancy (buoyancy slightly exceeds gravity) in water. Since
, a smaller
indicates higher efficiency. A line
was drawn in
Figure 5a, intersecting five curves at points P1 to P5. Theoretical
was determined through image fitting.
Figure 5b,c provide the corresponding
and
for each
at the theoretical
, labeled Q1–Q5 and R1–R5, respectively. The coordinates are presented in
Table 4.
The design
m, and the corresponding
is calculated using Equation (4) for each
as shown in
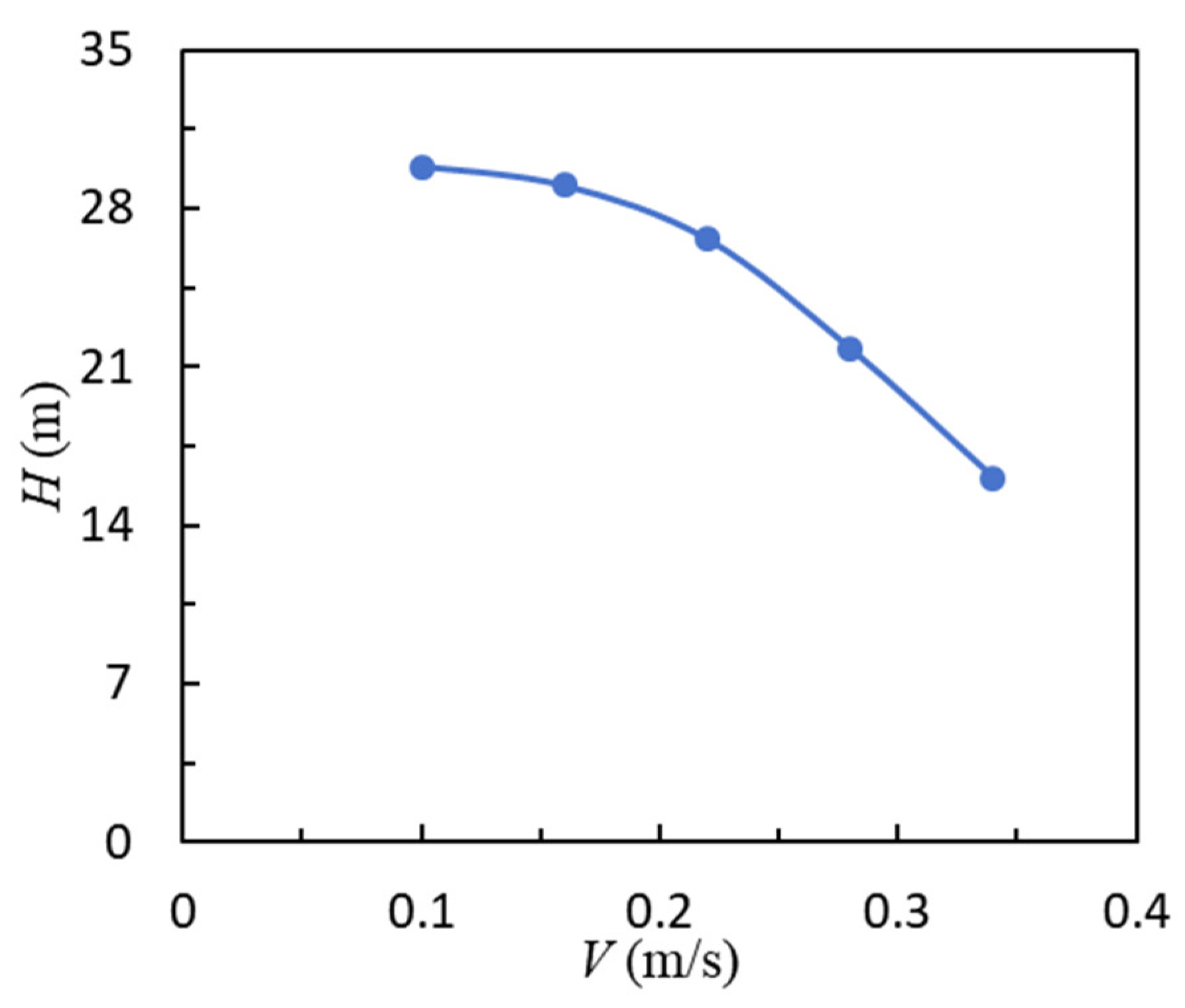
Table 4. Based on the data in
Table 5,
Figure 6 can be drawn.
Data fitting reveals the relationship between
and
.
The simulation results, as shown in
Figure 6, demonstrate that
H decreases as
V increases. This inverse relationship is consistent with the system’s design requirements, confirming that the system can effectively adjust its depth in response to tidal forces. Specifically, when the tidal current velocity is low, the system ascends to shallower depths, while higher tidal velocities drive the system to greater depths. This behavior is essential for achieving the desired vertical profiling range of 0–50 m, as outlined in the system’s design objectives.
The numerical simulations also provided valuable insights into the system’s performance under different tidal conditions, which were used to guide the selection of deployment sites and the setting of profiling depths during sea trials. For example, the results indicated that in regions with strong tidal currents, the system can achieve greater depths, making it suitable for monitoring deeper water columns. Conversely, in areas with weaker tidal currents, the system’s depth range may be more limited, requiring adjustments to the buoyancy regulation unit to achieve the desired profiling depths.
Overall, the numerical simulations not only validated the system’s design but also provided a theoretical basis for its deployment in various marine environments. The results confirmed that the system’s depth can be effectively controlled by tidal forces, ensuring its ability to perform continuous, high-resolution monitoring across the entire water column. This theoretical guidance was instrumental in planning the subsequent sea trials, where the system’s performance was further validated under real-world conditions.
2.2.2. Buoyancy Regulation Principle
In the actual marine environment, current velocity is influenced by factors such as geographical locations, the relative positions of the Earth, Moon, and Sun, offshore distance, and surrounding terrain. These factors may affect whether the current can always drive the system to move within the required depth range. For example, in China, Hangzhou Bay, a strong tidal region, exhibits a surge velocity range of 1.85–2.79 m/s and a fall velocity range of 1.44–2.35 m/s during spring tides [
19]. In Aoshan Bay, Shandong Province, the maximum rising tidal current velocity is 0.72 m/s, while the maximum falling tidal current velocity is 0.65 m/s [
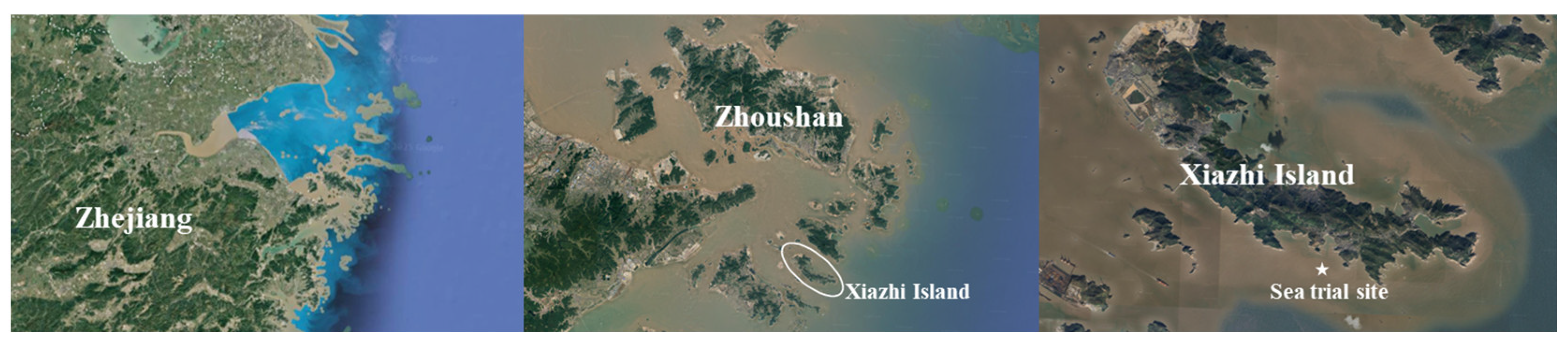
20]. Even within the same region, tidal current velocity varies with the moon’s phases. During neap tides near the channel of Xiazhi Island, Zhoushan, Zhejiang Province, the average flow velocities of high tide and low tide are 0.50 m/s and 0.46 m/s, respectively. During spring tides, the average rising tide velocity is 0.58 m/s, while the average falling tide velocity is 0.69 m/s [
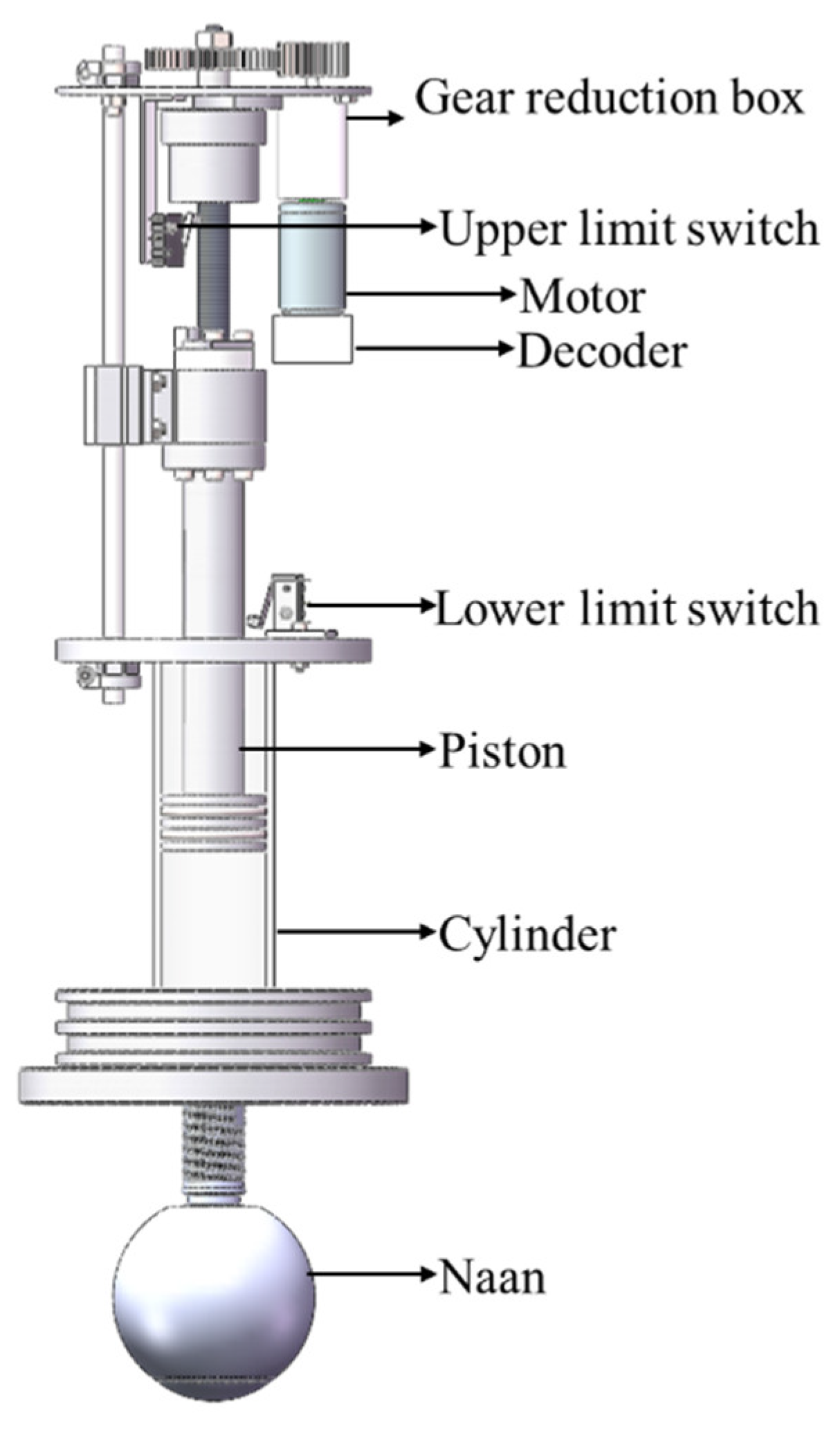
21]. To enable practical application, relying solely on tidal flow energy would limit the profiler’s offshore usability. Thus, a buoyancy regulation unit, as illustrated in
Figure 7, is incorporated in the system.
A pressure sensor on the upper end cap of the profiler measures the system’s depth. When tidal flow cannot drive the system to the specified depth, the buoyancy regulation unit actively adjusts buoyancy to enable controlled floating and sinking. The buoyancy regulation unit uses a decoder for data transmission with the MCU, which controls motor rotation. The motor reduces speed via a gear reduction box, driving the piston up or down to push oil into or out of the cylinder. This process increases or decreases buoyancy, enabling the system to float or sink. A limit switch restricts the piston rod’s movement range, preventing overextension.
2.2.4. Sample Collection Principle
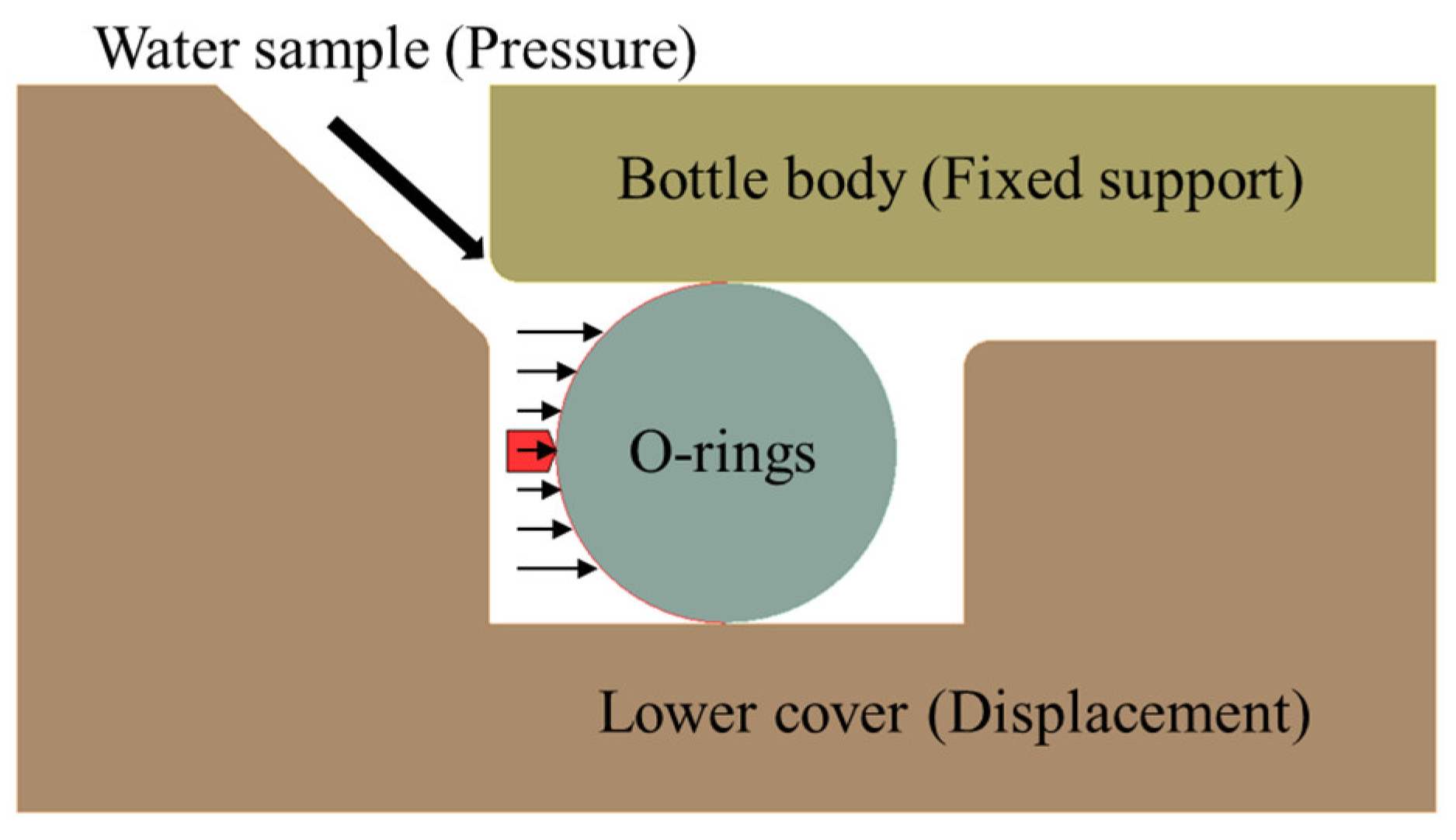
The sampler unit uses a cap-type sampler [
22] consists of a bottle body, upper and lower covers, O-rings, a rubber band, and a traction rope. The bottle body serves as the main structure of the water sampler, storing collected water samples and supporting other components. A rubber band connects the upper and lower covers. Initially, the traction rope is tightened to keep the upper and lower caps open. When the system reaches the specified depth, the motor releases the pull ring, allowing the rubber band’s tension to close the upper and lower caps, completing sample collection. The construction of the sampler bottle is shown in
Figure 8.
The sealing mechanism of the water sampler relies on the tension provided by the deformation of a rubber band. This tension causes the bottle cap and the bottle body to compress against each other, deforming the O-ring to close the gap between the cap and the body. Once the water sampler is closed underwater, it becomes filled with seawater, equalizing the internal and external pressure of the sampler. As a result, pressure changes caused by the sampler’s depth variation in seawater do not lead to sample leakage or external seawater infiltration. After the sampler is brought to the surface, the rubber band must provide sufficient tension and ensure proper deformation of the O-ring to prevent sample leakage.
The elasticity of the rubber band is calculated using Hooke’s Law.
where
is the force,
is the elongation of the rubber band, and
is the stiffness coefficient. The stiffness coefficient
depends on the length
and cross-sectional area
of the untensioned rubber band. The relationship is given by:
where
is the Young’s modulus of the material.
The rubber band, with a Young’s modulus of 1.5 MPa, is designed as a ring with a circumference of 400 mm and a square cross-section with a width of 10 mm and a thickness of 4 mm. Using these parameters, the stiffness coefficient 150 N/m is obtained.
After the upper and lower covers of the water sampler are closed, the length of the rubber band increases to approximately 700 mm. Therefore, the elastic force of the rubber band is 45 N, and the tension on the upper and lower covers is 90 N. After the water sampler is filled with seawater, the weight of the seawater inside is approximately 2.5 kg, and the weight of the lower end cap is about 0.2 kg. This results in a force of approximately 63.5 N being applied to the O-ring.
The O-ring is made of soft rubber, with a wire diameter of 3.6 mm and an inner diameter of 61.4 mm. The groove width is 5 mm, and the groove depth is 3 mm. Under the applied force, the O-ring compresses by 0.6 mm, ensuring that the lower cap fits tightly against the bottle body.
The pressure on the O-ring due to the seawater can be calculated using the formula:
where
is the pressure,
1020 kg/m
3 is the density of seawater,
9.81 m/s
2 is the acceleration due to gravity, and
is the height of the liquid. The calculated pressure is approximately 3602.23 Pa.
To theoretically validate the feasibility of the water sampler’s design, ensuring that it can effectively collect and preserve water samples without leakage, simulations were performed using ANSYS Workbench (Version 2020 R2) [
23]. The model design is shown in
Figure 9. The simulations analyzed the deformation and contact pressure of the O-ring under different internal pressures, providing insights into the sealing effectiveness under real-world conditions.
Figure 10 illustrates the deformation and contact surface pressure of the O-ring after the bottle cap is closed and internal pressure is applied. The simulation results show that the maximum deformation of the O-ring is approximately 0.6 mm, with no significant lateral displacement observed. Additionally, the contact pressure exceeds the medium pressure, confirming that the O-ring provides an effective seal.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}