Currently, fish-like vehicles employ two primary propulsion modes: BCF (Body and/or Caudal Fin propulsion) and MPF (Media and/or Paired Fin propulsion). In natural environments, approximately 15% of fish species utilize the MPF mode as their main means of propulsion, relying on dorsal, pectoral, and pelvic fins (Breder [
1]; Webb and Paul [
2]). In comparison to the BCF mode, this particular mode exhibits evident advantages in terms of stability and maneuverability at low speeds: the underwater vehicle, propelled by the MPF mode, incorporates bionic wave fins on both sides that generate turning torque through asymmetric movement and other mechanisms to enable turning motion. Additionally, reverse transmission of traveling waves facilitates reversing, thereby enhancing the maneuverability of underwater vehicles. By adjusting the angle of attack of fluctuating fins using a steering gear, heave and pitch motions can be achieved with strong maneuverability. The inclusion of low-disturbance floating fins ensures stealthy performance while wave propulsion eliminates interference from debris such as water grass or reed, exhibiting excellent environmental adaptability. Furthermore, by utilizing ground friction during contact between wave fin crests and surfaces, beaching, as well as walking on land or snow, can be accomplished effectively, showcasing remarkable amphibious capabilities. Hence, it serves as an exceptional operational platform for specialized tasks such as underwater detection and reconnaissance.
In light of this, both domestic and foreign scholars have conducted comprehensive studies on the propulsion mechanism, hydrodynamic performance, and optimization strategy of banded fins in MPF propulsion mode. Lighthill [
3] introduced the “slender body theory” from aerodynamics into hydrodynamics for the first time. He simplified fish bodies as slender bodies and further proposed the “large swing slender body theory”. Lighthill [
4] provided an analytical solution for swimming efficiency based on potential flow theory (Lighthill [
5]). Cheng et al. [
6] and Tong et al. [
7] assumed rectangular or triangular thin plates to represent fish bodies and developed the Three-dimensional Undulating Plate Theory (3DWPT). By combining linearized boundary conditions with a plane wake model, they employed the unsteady vortex lattice method derived from potential flow theory to investigate how parameters related to a fish’s swimming propulsion wave and fin shape influence its propulsion performance. This theory has gained wide acceptance among international counterparts and is extensively used in analyzing the hydrodynamic characteristics of banded fins (Cheng and Blickhan [
8]; Mchenry et al. [
9]; Pedley and Hill [
10]; Miriam [
11]; Long et al. [
12]). Zhang [
13] focused his research on studying the propulsion performance of banded fins. Through comparing two fluctuation modes—constant amplitude from front to back versus gradually changing amplitude from front to back—he concluded that maintaining a constant amplitude yields better propulsion performance and swimming stability. Zhang [
14] and Liu [
15] optimized and evaluated the hydrodynamic performance of banded fins by considering morphology and function using the equations governing the control of unsteady 3D flow along with neural network techniques. Their work provides valuable guidance for the further analysis of banded fin fluctuation’s propulsion mechanism, as well as research aimed at enhancing its overall performance. Zhang et al. [
16] investigated the contribution of vortices at various positions to the hydrodynamic performance of banded fins by analyzing the vorticity field. They proposed a method for balancing local structural effects and overall fin performance through moderate chordwise deformation of the fin surface, providing new insights into the role of vortices in underwater motion and force enhancement mechanisms. Simultaneously, a bio-inspired underwater vehicle with banded-like fins can be manufactured to fulfill the requirements of low-speed operations, drawing inspiration from the flapping mechanism of flexible fins. Zhou et al. [
17] conducted computational fluid dynamics simulations and experimental comparisons to reveal specific phenomena in the bio-inspired flapping mode. Zeng et al. [
18] integrated wave fins with quadrotors, establishing dynamic equations for underwater motion and conducting experimental verification. He et al. [
19] and Xing et al. [
20] investigated batfish, designing and manufacturing bio-inspired underwater vehicles that imitate batfish and enhance their underwater navigation performance through a novel pectoral fin mechanical structure. Wei et al. [
21] numerically simulated the convective fin system based on the high-resolution numerical technique of the constrained immersion boundary method, and revealed the basic variation law between the hydrodynamic performance and motion parameters of the fluctuating fin. Shi et al. [
22] used the ghost cell method to study the fluid dynamics of three-dimensional fish swimming in oblique flow. Chen et al. [
23] conducted research on the underwater motion modeling and closed-loop control of a bionic undulating fin robot, enhancing the control accuracy and stability by establishing a dynamic model and developing a neural network PID controller. Li et al. [
24] proposed a separated undulating fin propulsion method to enhance thrust, achieving up to 13.5% greater thrust compared to traditional fins, and revealed the underlying mechanisms through numerical simulations and fluid dynamics experiments. Li et al. [
25] developed a separated undulating fins model inspired by dragonflies to improve thrust stability for underwater robots, demonstrating through numerical simulation and experimental validation that this approach can significantly reduce thrust fluctuations and enhance control precision. Shi et al. [
26] investigated the hydrodynamic performance of 2D undulating fins in the wake of a semi-cylinder using numerical simulation, revealing the impact of varying flow conditions on fin propulsion and providing insights into the passive hydrodynamic interactions of fins. Sun et al. [
27] conducted a numerical study on the propulsive efficiency of an undulating fin propulsor, finding that increasing amplitude decreases efficiency and that higher frequencies improve stability, offering valuable insights for the shape optimization of undulating fins. Vu et al. [
28] developed a swimming mode controller for an elongated undulating fin robot using multi-agent deep deterministic policy gradient (MA-DDPG), achieving superior propulsive efficiency compared to traditional reinforcement learning methods. Wei et al. [
29] analyzed the hydrodynamic performance of dual three-dimensional undulating fin formations, revealing that side-by-side arrangements reduce thrust and energy consumption, while tandem formations enhance rear fin thrust but increase energy use, providing insights into the collective behaviors of undulating fins. Xia et al. [
30] introduced a novel IB-LB method for predicting the hydrodynamics of bionic undulating fin thrusters (BUFTs), demonstrating increased propulsive force and efficiency with higher Reynolds numbers and optimizing propulsion performance at specific frequency and amplitude conditions. Yu et al. [
31,
32] proposed a novel design with separated elastic fin rays and asynchronous control for undulating fin amphibious robots to enhance terrestrial locomotion stability, demonstrating significant improvements in postural stability through both simulation and experimental validation.
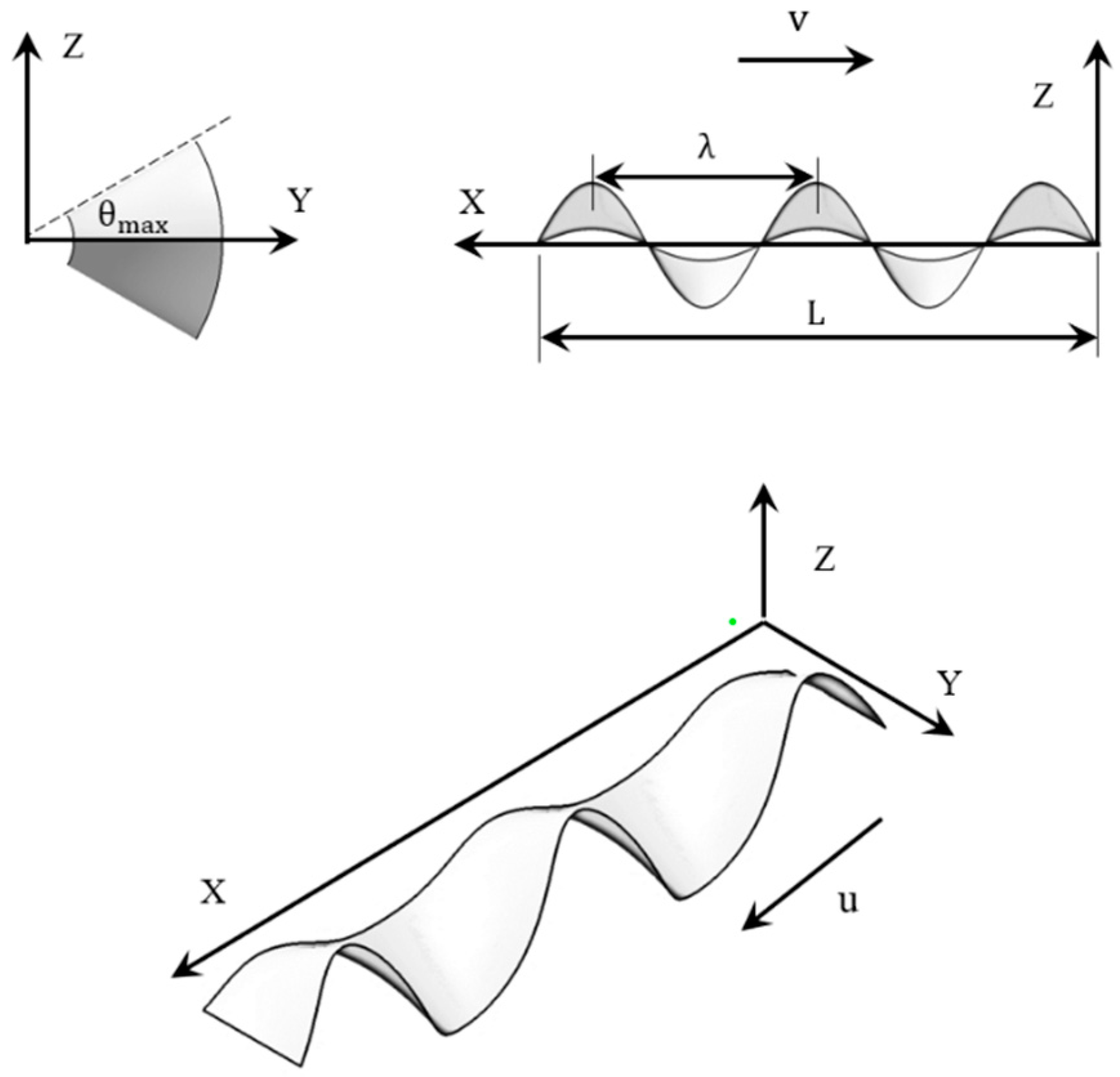
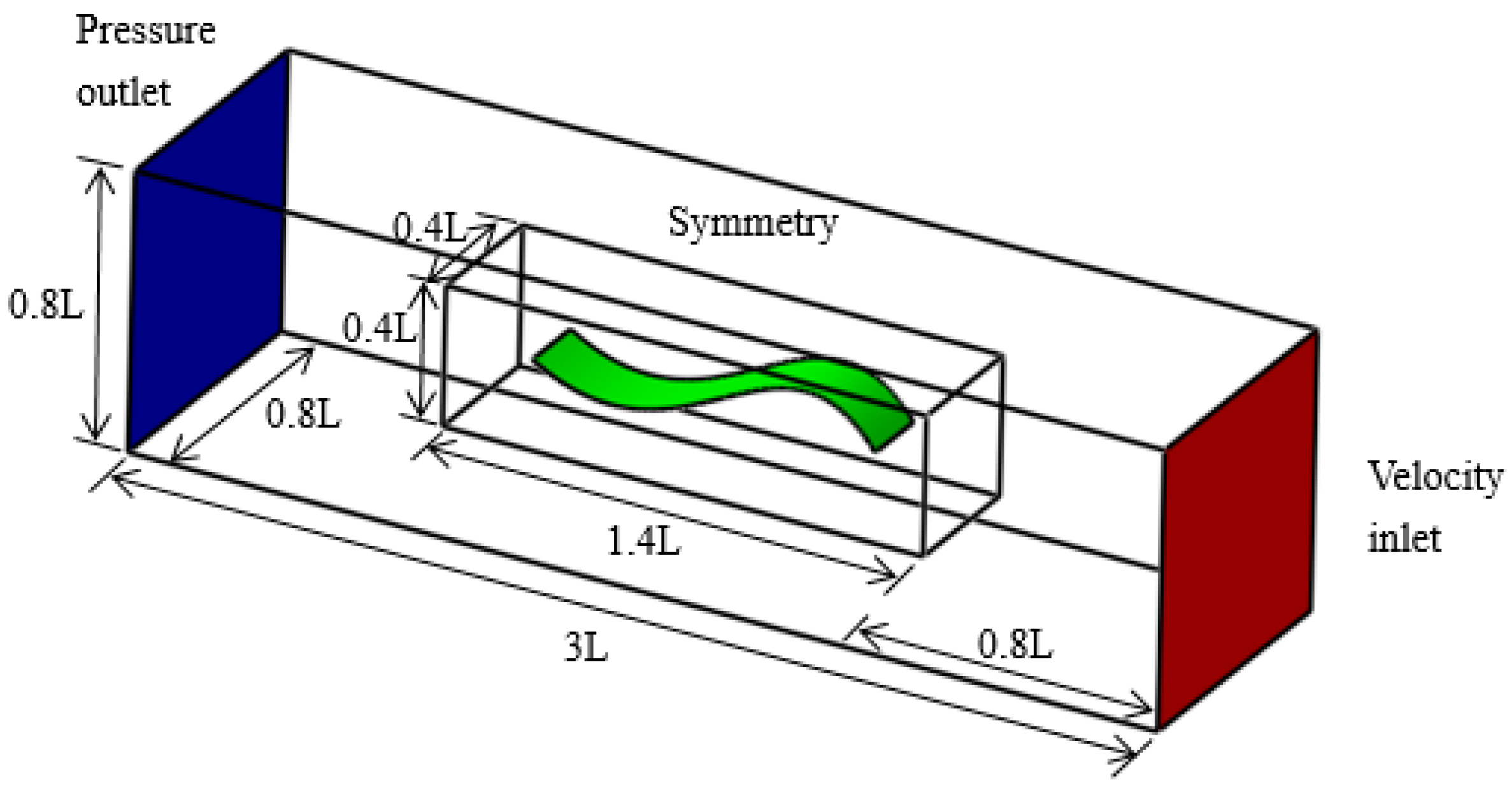
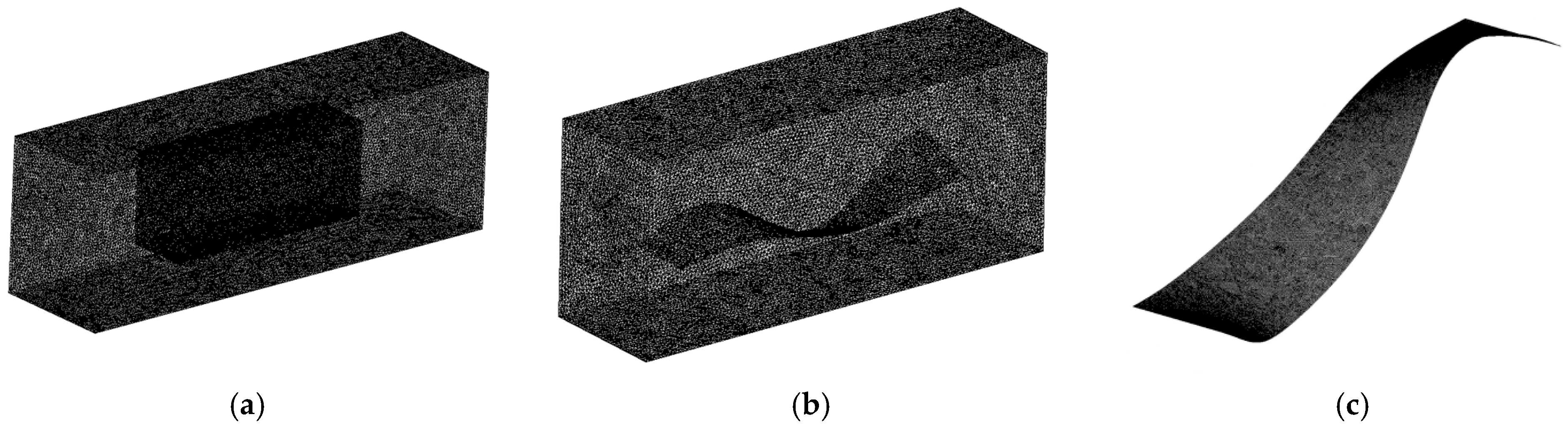
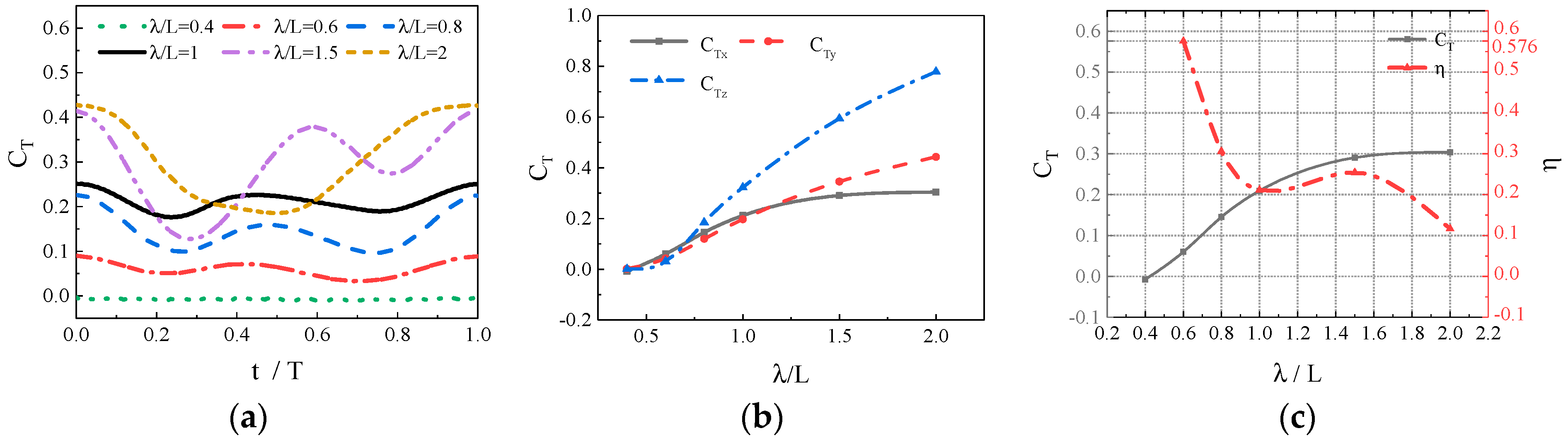
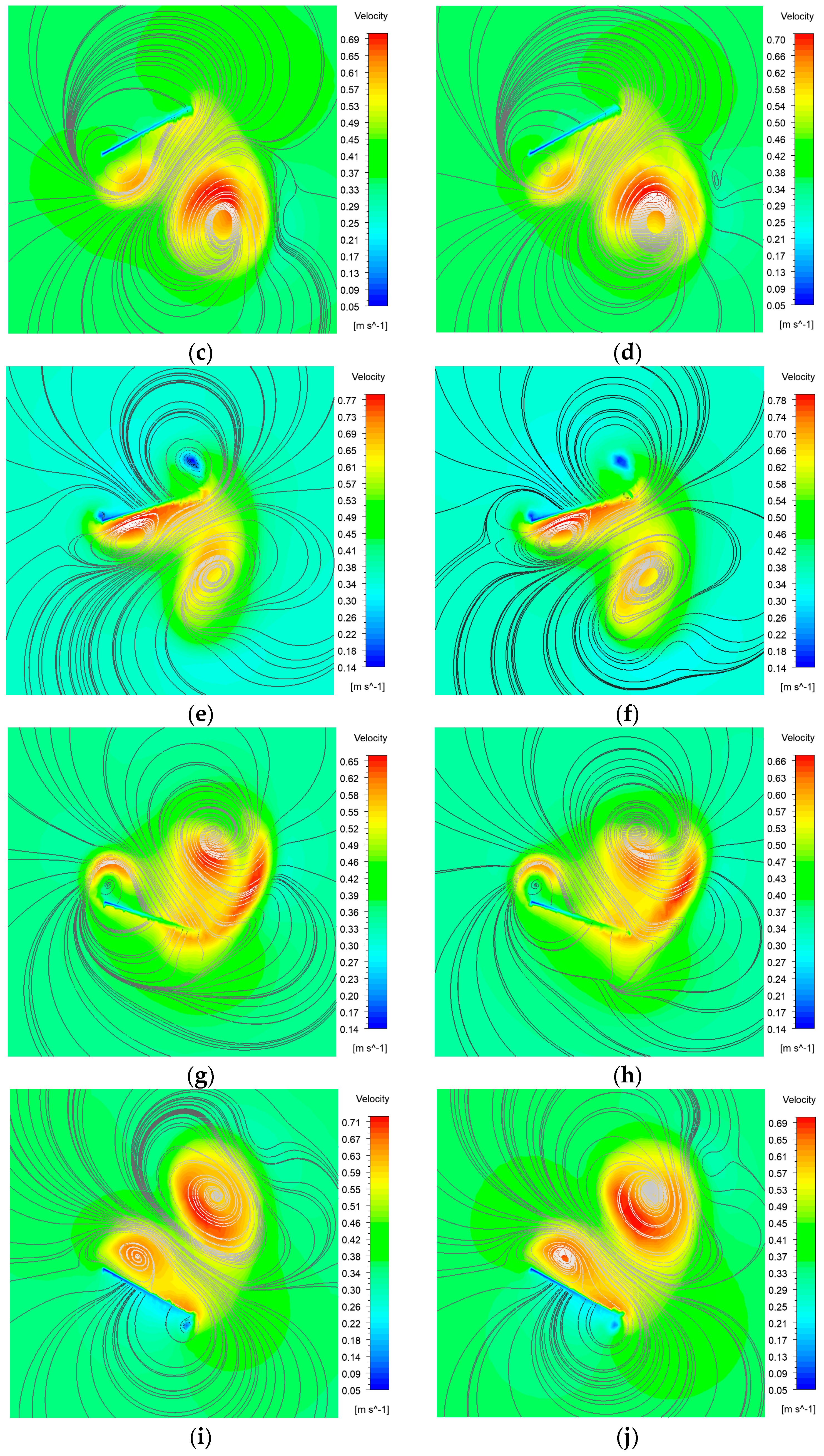
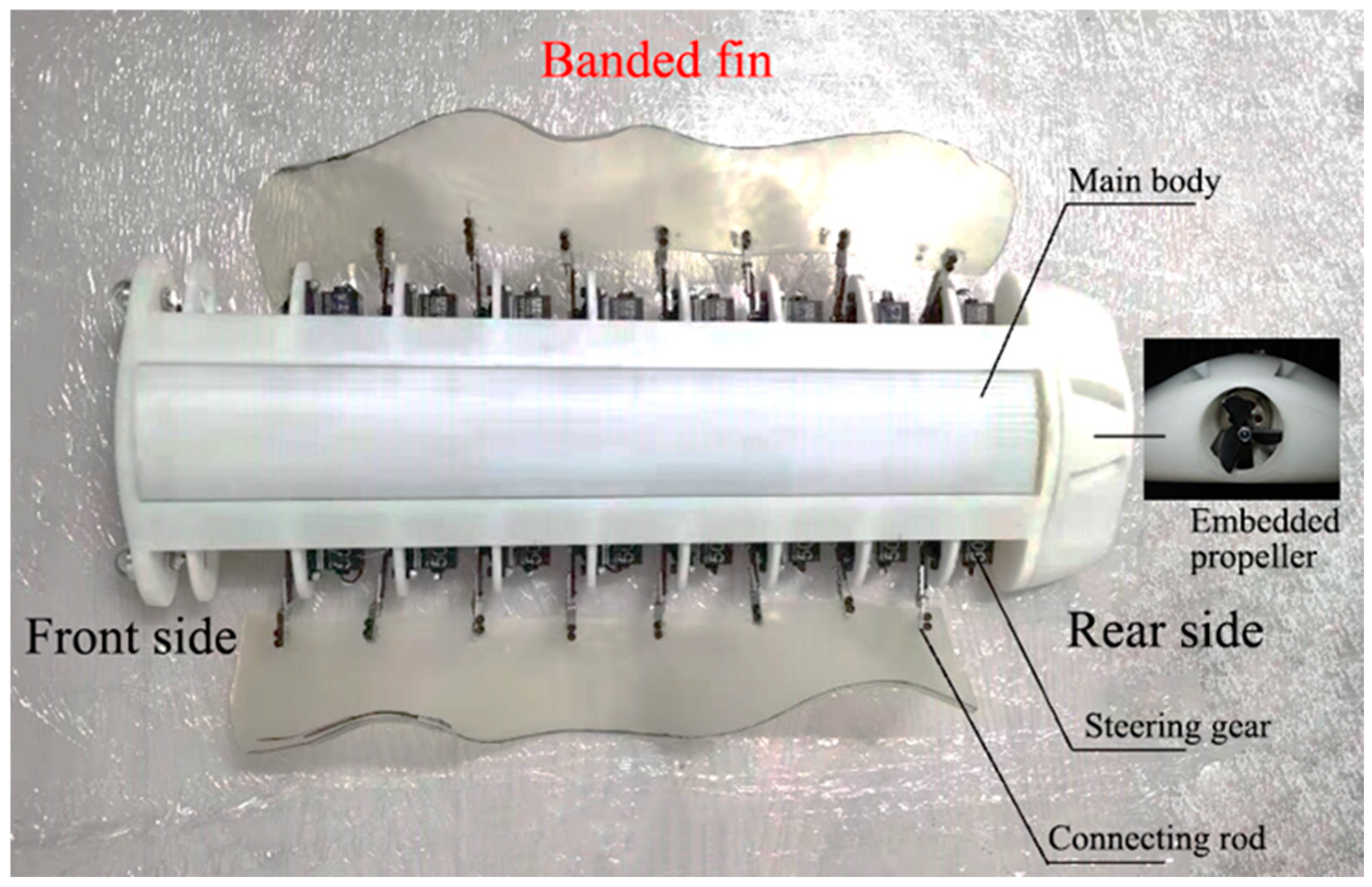
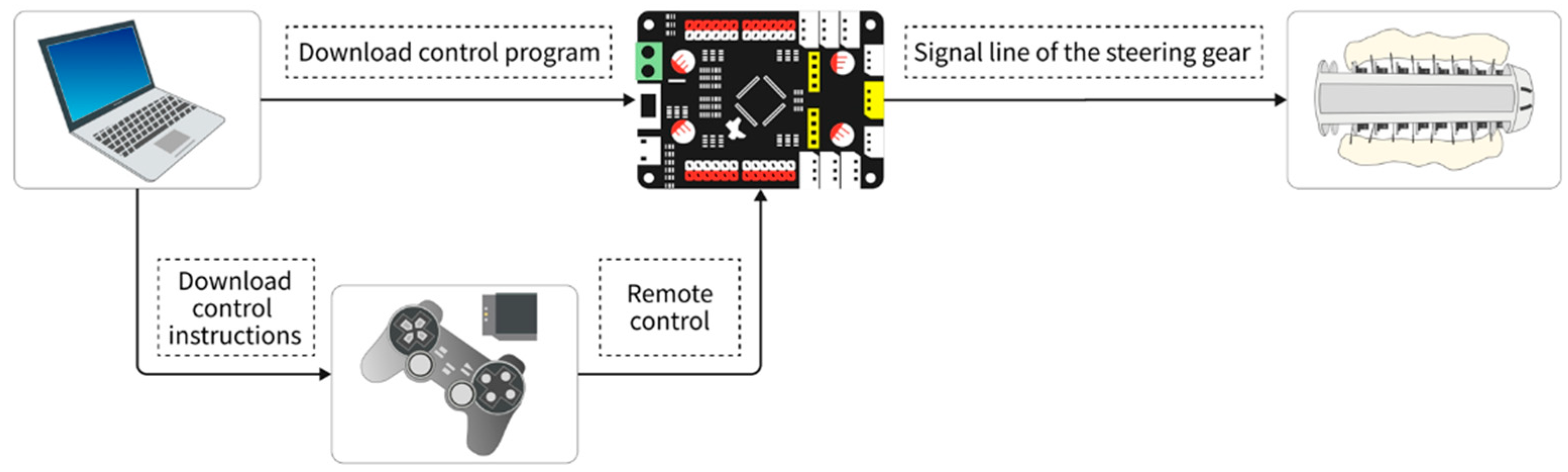
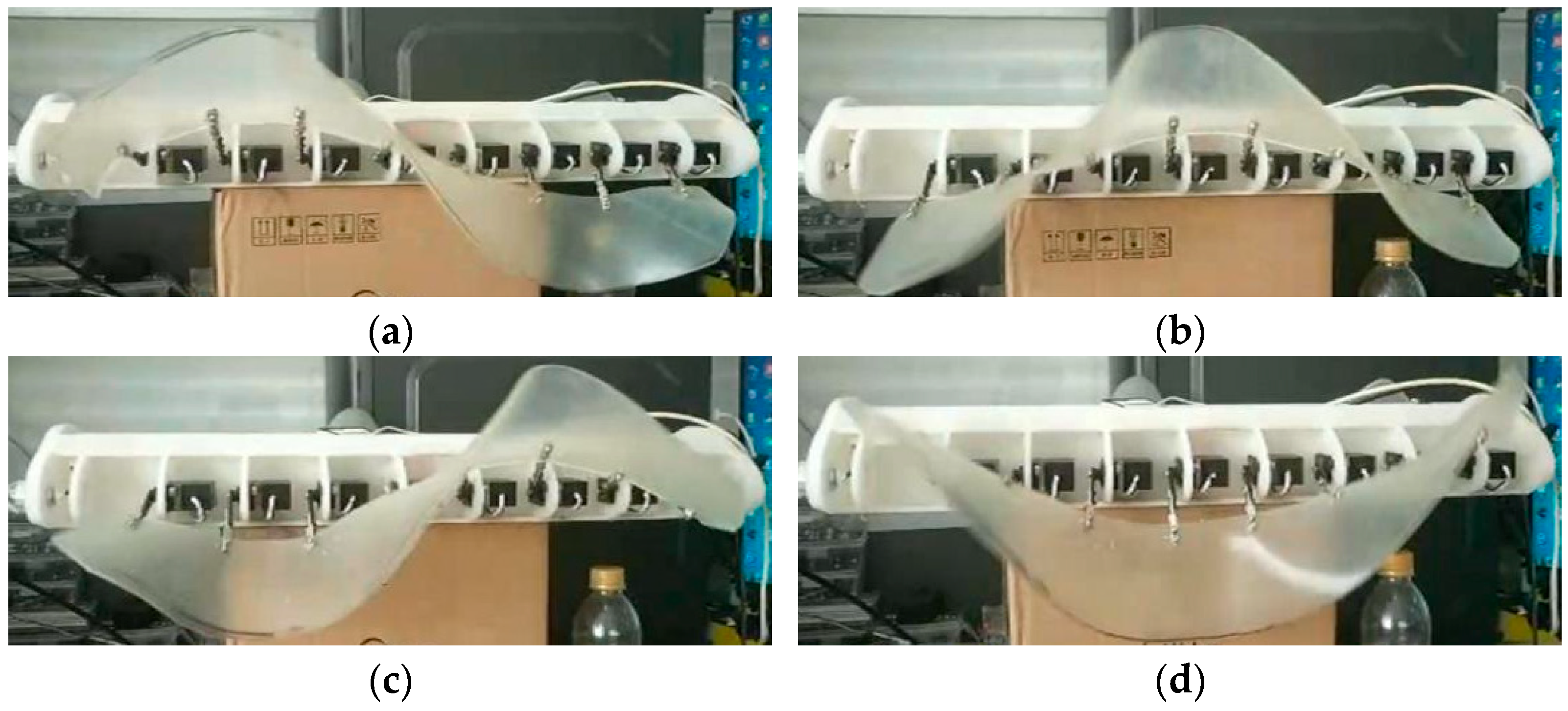
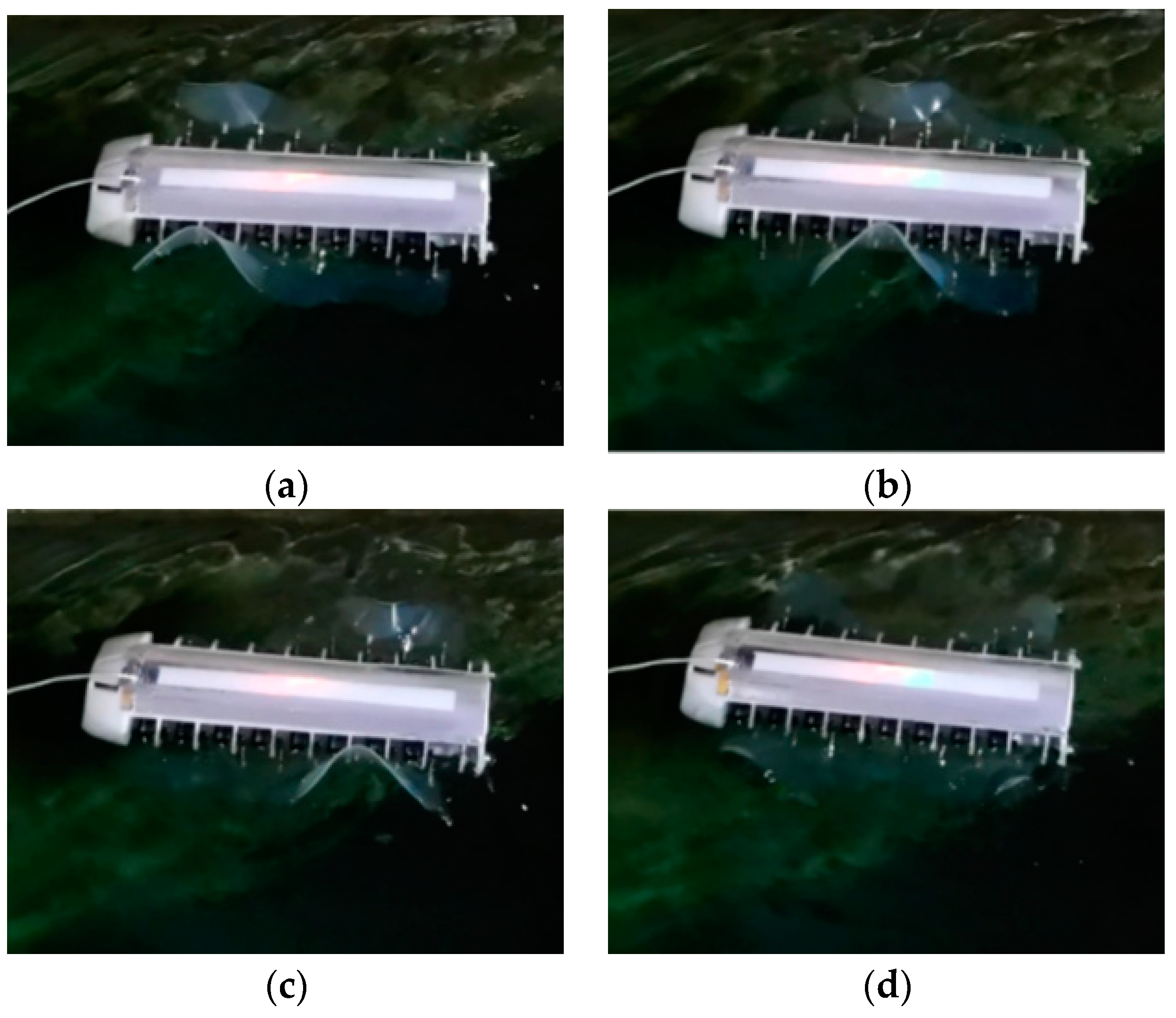
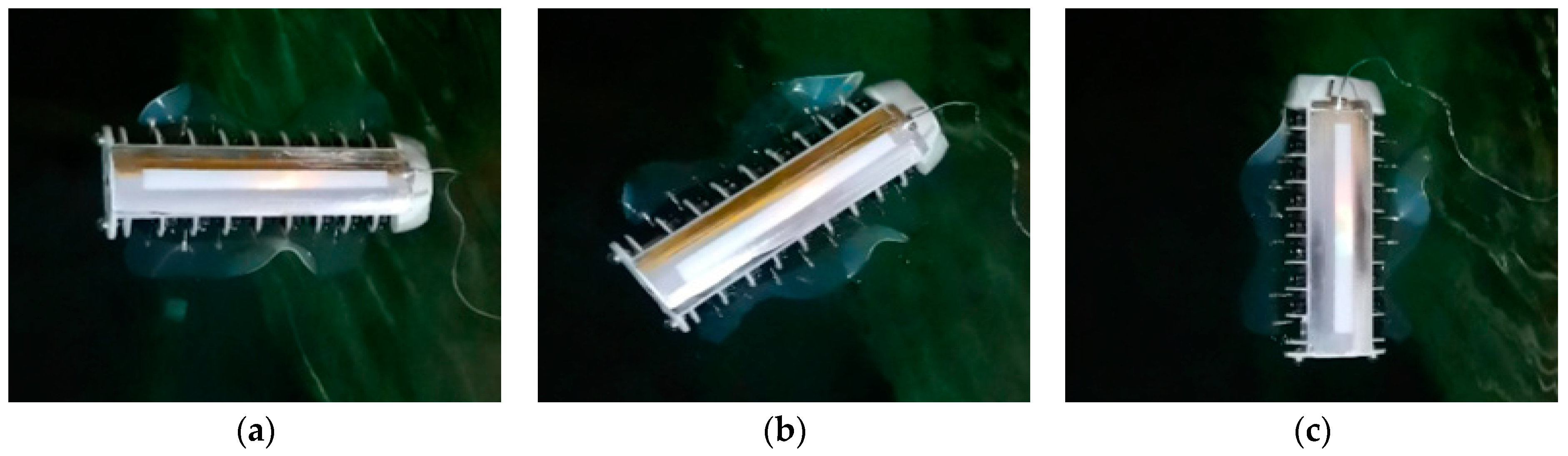
Currently, most research on the propulsion performance of banded fins derives from biomimetic sources rather than focusing directly on the banded fins themselves, as demonstrated in this paper. There is a limited number of studies that investigate the hydrodynamic performance and optimization of fin types for practical banded fins used in underwater vehicles. In this study, we focus on the biomimetic analysis of the long dorsal fin of banded fish, establishing a wave description equation for the fin and using numerical simulation methods to investigate its wave propulsion mechanism. Additionally, we perform a comprehensive analysis of hydrodynamic performance by varying key parameters, thereby establishing the relationship between the wave thrust coefficient of the banded fin and these parameters. We also investigate the hydrodynamic performance of the fin surface by varying the angle of attack and implementing chamfering on the front and rear edges to optimize the overall hydrodynamic efficiency of the banded fins. Based on these numerical results, we design a bio-inspired vehicle equipped with a banded fin propulsion system and conduct underwater tests to validate the rationale behind its design. This study contributes to bio-inspired propulsion systems by establishing a kinematic and hydrodynamic model for the banded fin based on the MPF mode. Through numerical simulations, the hydrodynamic performance of the fin is analyzed under typical conditions, revealing how key parameters like wave number, swing amplitude, and wave frequency affect oscillatory thrust. This study also explores the impact of angle of attack and edge chamfering on optimizing hydrodynamic efficiency. This study differs from existing research by focusing directly on the hydrodynamic performance and optimization of banded fins for underwater propulsion, rather than relying on general biomimetic models. It develops a specific kinematic and hydrodynamic model, analyzes key parameters like wave number and swing amplitude, and investigates the effects of angle of attack and edge chamfering on propulsion efficiency.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}