
Trajectory Compression Algorithm via Geospatial Background Knowledge



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Literature Review
2.1. Theoretical Research on Trajectory Compression
2.2. Research on Ship Trajectory Compression
3. Algorithm Description
3.1. Data Cleaning
3.2. Trajectory Segmentation Based on Distance from Shoreline
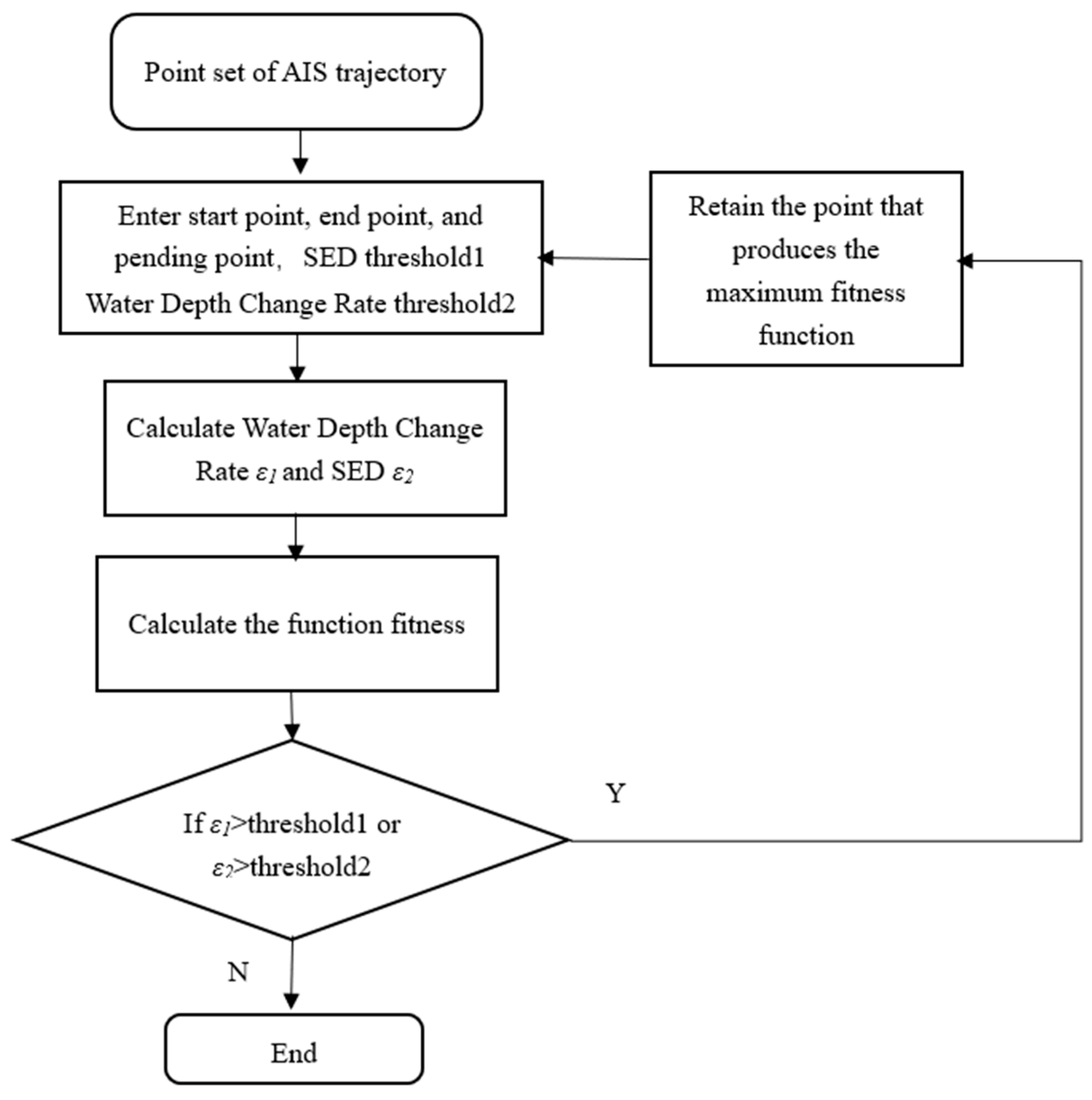
3.3. Trajectory Compression Algorithm via Geospatial Background Knowledge
| Algorithm 1. Trajectory Compression Algorithm via Geospatial Background Knowledge |
| Input: A trajectory T = {p0, p1,…, pi−1}, water depth change rate threshold1, distance threshold2. Output: Simplified trajectory points set KS
|
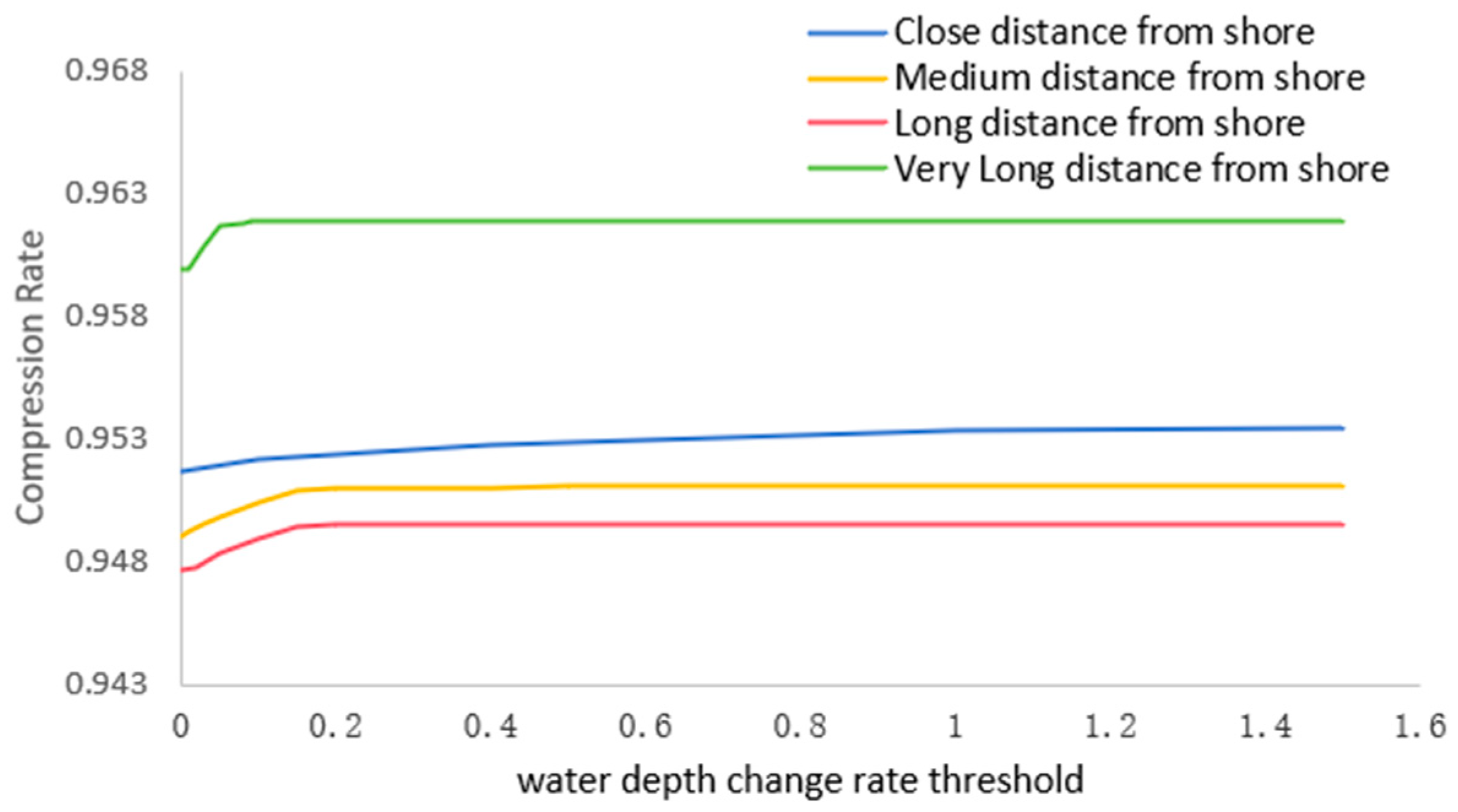
3.4. Water Depth Change Rate Threshold and Distance Threshold Selection
4. Experiments and Analyses
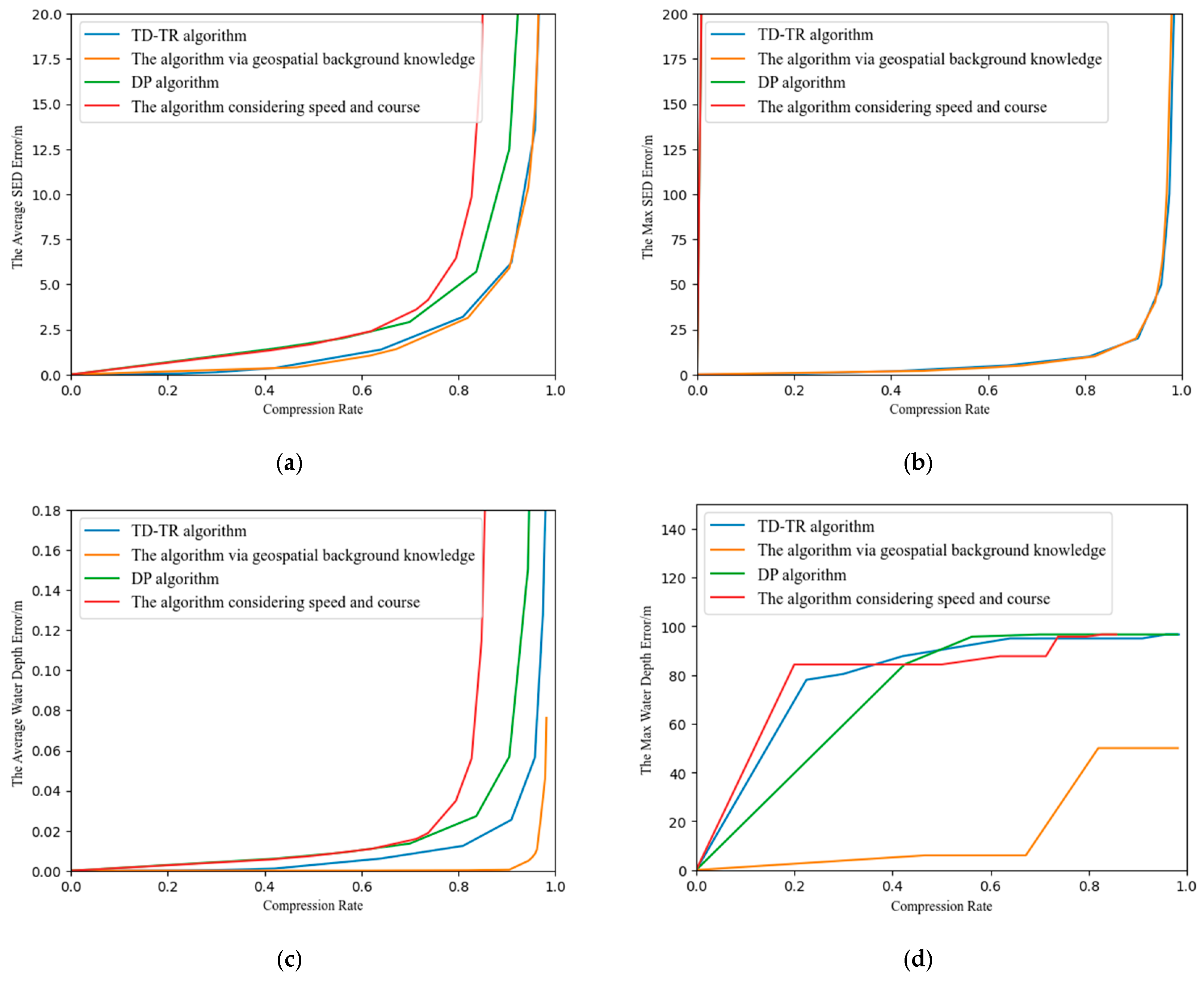
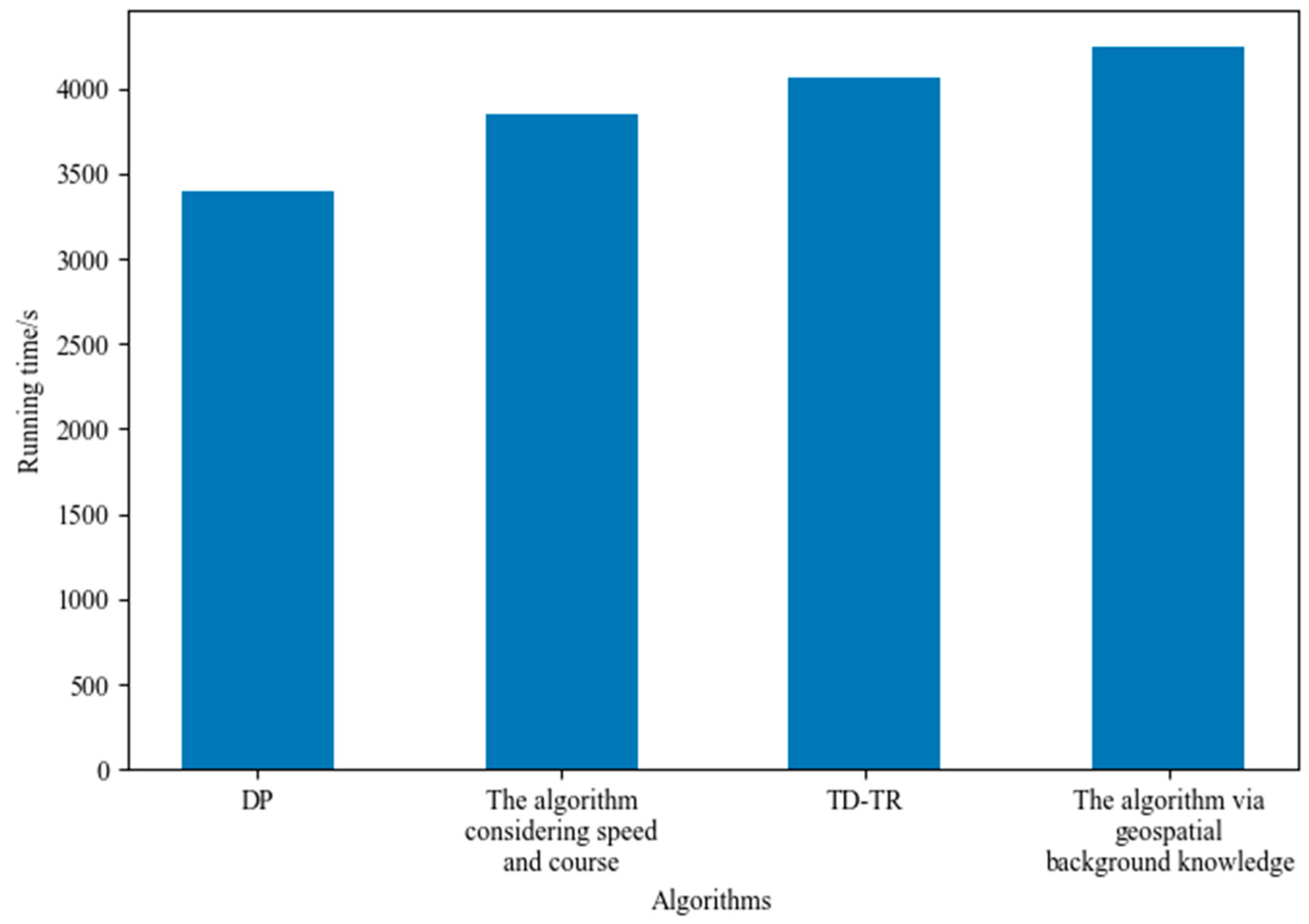
4.1. Comparison with Other Algorithms
4.2. The Validation of Visual Observation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schöller, F.E.; Enevoldsen, T.T.; Becktor, J.B.; Hansen, P.N. Trajectory prediction for marine vessels using historical ais heatmaps and long short-term memory networks. IFAC PapersOnLine 2021, 54, 83–89. [Google Scholar] [CrossRef]
- Li, Z.C.; Liu, T.; Peng, X.; Ren, J.X.; Liang, S. An AIS-based deep learning model for multi-task in the marine industry. Ocean Eng. 2024, 293, 116694. [Google Scholar] [CrossRef]
- Wang, S.W.; Li, Y.; Xing, H.; Zhang, Z.Y. Vessel trajectory prediction based on spatio-temporal graph convolutional network for complex and crowded sea areas. Ocean Eng. 2024, 298, 117232. [Google Scholar] [CrossRef]
- Li, G.C.; Zhang, X.Y.; Jiang, L.L.; Wang, C.B.; Huang, R.N.; Liu, Z.S. An approach for traffic pattern recognition integration of ship AIS data and port geospatial features. Geo-Spat. Inf. Sci. 2024, 27, 1–28. [Google Scholar] [CrossRef]
- Xie, Z.X.; Bai, X.E.; Xu, X.F.; Xiao, Y.J. An anomaly detection method based on ship behavior trajectory. Ocean Eng. 2024, 293, 116640. [Google Scholar] [CrossRef]
- Shu, Y.Q.; Han, B.Y.; Song, L.; Yan, T.; Gan, L.X.; Zhu, Y.X.; Zheng, C.M. Analyzing the spatio-temporal correlation between tide and shipping behavior at estuarine port for energy-saving purposes. Appl. Energy 2024, 367, 123382. [Google Scholar] [CrossRef]
- Shu, Y.Q.; Cui, H.L.; Song, L.; Gan, L.X.; Xu, S.; Wu, J.; Zheng, C.M. Influence of sea ice on ship routes and speed along the Arctic Northeast Passage. Ocean Coastal Manag. 2024, 256, 107320. [Google Scholar] [CrossRef]
- Ma, Q.D.; Tang, H.; Liu, C.; Zhang, M.Y.; Zhang, D.Z.; Liu, Z.; Zhang, L.Y. A big data analytics method for the evaluation of maritime traffic safety using automatic identification system data. Ocean Coastal Manag. 2024, 251, 107077. [Google Scholar] [CrossRef]
- Lin, Q.; Yin, B.B.; Zhang, X.Y.; Grifoll, M.; Feng, H.X. Evaluation of ship collision risk in ships' routeing waters: A Gini coefficient approach using AIS data. Phys. A 2023, 624, 128936. [Google Scholar] [CrossRef]
- Feng, H.X.; Grifoll, M.; Yang, Z.Z.; Zheng, P.J. Collision risk assessment for ships? routeing waters: An information entropy approach with Automatic Identification System (AIS) data. Ocean Coastal Manag. 2022, 224, 106184. [Google Scholar] [CrossRef]
- Shu, Y.Q.; Hu, A.Y.; Zheng, Y.Z.; Gan, L.X.; Xiao, G.N.; Zhou, C.H.; Song, L. Evaluation of ship emission intensity and the inaccuracy of exhaust emission estimation model. Ocean Eng. 2023, 287, 11. [Google Scholar] [CrossRef]
- Zhang, K.; Lin, Q.; Lian, F.; Feng, H.X. Estimating emissions from fishing vessels: A big Beidou data analytical approach. Front. Mar. Sci. 2024, 11, 1418366. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Li, G.R.; Zhang, Z.K.; Liu, Y.B. Harnessing the power of Machine learning for AIS Data-Driven maritime Research: A comprehensive review. Transp. Res. Part E Logist. Transp. Rev. 2024, 183, 103426. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Shi, G.Y.; Li, S.; Zhang, S.K. Vessel Trajectory Online Multi-Dimensional Simplification Algorithm. J. Navig. 2020, 73, 342–363. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartogr. Int. J. Geogr. Inf. Geovis. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Meratnia, N.; de By, R.A. Spatiotemporal compression techniques for moving point objects. In Proceedings of the Advances in Database Technology-EDBT 2004: 9th International Conference on Extending Database Technology, Heraklion, Crete, Greece, 14–18 March 2004; pp. 765–782. [Google Scholar]
- Singh, A.K.; Aggarwal, V.; Saxena, P.; Prakash, O. Performance analysis of trajectory compression algorithms on marine surveillance data. In Proceedings of the 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; pp. 1074–1079. [Google Scholar]
- Keogh, E.; Chu, S.; Hart, D.; Pazzani, M. An online algorithm for segmenting time series. In Proceedings of the 2001 IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 289–296. [Google Scholar]
- Muckell, J.; Olsen, P.W.; Hwang, J.-H.; Lawson, C.T.; Ravi, S. Compression of trajectory data: A comprehensive evaluation and new approach. GeoInformatica 2014, 18, 435–460. [Google Scholar] [CrossRef]
- Long, C.; Wong, R.C.-W.; Jagadish, H. Direction-preserving trajectory simplification. Proc. VLDB Endow. 2013, 6, 949–960. [Google Scholar] [CrossRef]
- Yang, M.; Yan, X.F.; Zhang, X.; Li, X.G. Constrained trajectory simplification with speed preservation. Cartogr. Geogr. Inf. Sci. 2020, 47, 110–124. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Hung, C.-C.; Lei, P.-R. A velocity-preserving trajectory simplification approach. In Proceedings of the 2016 Conference on Technologies and Applications of Artificial Intelligence (TAAI), Hsinchu, Taiwan, 25–27 November 2016; pp. 58–65. [Google Scholar]
- Gao, J.B.; Cai, Z.; Yu, W.J.; Sun, W. Trajectory Data Compression Algorithm Based on Ship Navigation State and Acceleration Variation. J. Mar. Sci. Eng. 2023, 11, 216. [Google Scholar] [CrossRef]
- Ma, L.; Shi, G.Y.; Li, W.F.; Jiang, D.P. A Direction-Preserved Vessel Trajectory Compression Algorithm Based on Open Window. J. Mar. Sci. Eng. 2023, 11, 2362. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, S.Z.; Cao, L.F.; Lin, B. The Identification of Ship Trajectories Using Multi-Attribute Compression and Similarity Metrics. J. Mar. Sci. Eng. 2023, 11, 2005. [Google Scholar] [CrossRef]
- Zhang, S.K.; Liu, Z.J.; Cai, Y.; Wu, Z.L.; Shi, G.Y. AIS Trajectories Simplification and Threshold Determination. J. Navig. 2016, 69, 729–744. [Google Scholar] [CrossRef]
- Tang, C.H.; Wang, H.; Zhao, J.H.; Tang, Y.Q.; Yan, H.R.; Xiao, Y.J. A method for compressing AIS trajectory data based on the adaptive-threshold Douglas-Peucker algorithm. Ocean Eng. 2021, 232, 109041. [Google Scholar] [CrossRef]
- Huang, C.H.; Qi, X.C.; Zheng, J.; Zhu, R.C.; Shen, J. A maritime traffic route extraction method based on density-based spatial clustering of applications with noise for multi-dimensional data. Ocean Eng. 2023, 268, 113036. [Google Scholar] [CrossRef]
- Zhu, F.X.; Ma, Z.H. Ship Trajectory Online Compression Algorithm Considering Handling Patterns. IEEE Access 2021, 9, 70182–70191. [Google Scholar] [CrossRef]
- Wei, Z.K.; Xie, X.L.; Zhang, X.J. AIS trajectory simplification algorithm considering ship behaviours. Ocean Eng. 2020, 216, 108086. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, Y.J.; Yuan, X.Y.; Wang, H.B. Compressing AIS Trajectory Data Based on the Multi-Objective Peak Douglas-Peucker Algorithm. IEEE Access 2023, 11, 6802–6821. [Google Scholar] [CrossRef]
- Lee, W.; Cho, S.W. AIS Trajectories Simplification Algorithm Considering Topographic Information. Sensors 2022, 22, 7036. [Google Scholar] [CrossRef] [PubMed]
- Yan, R.; Mo, H.Y.; Yang, D.; Wang, S.A. Development of denoising and compression algorithms for AIS-based vessel trajectories. Ocean Eng. 2022, 252, 111207. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, Y.; Sun, X.; Zhang, Y.; Zhou, J.; Feng, H. Trajectory Compression Algorithm via Geospatial Background Knowledge. J. Mar. Sci. Eng. 2025, 13, 406. https://doi.org/10.3390/jmse13030406
Fang Y, Sun X, Zhang Y, Zhou J, Feng H. Trajectory Compression Algorithm via Geospatial Background Knowledge. Journal of Marine Science and Engineering. 2025; 13(3):406. https://doi.org/10.3390/jmse13030406
Chicago/Turabian StyleFang, Yanqi, Xinxin Sun, Yuanqiang Zhang, Jumei Zhou, and Hongxiang Feng. 2025. "Trajectory Compression Algorithm via Geospatial Background Knowledge" Journal of Marine Science and Engineering 13, no. 3: 406. https://doi.org/10.3390/jmse13030406
APA StyleFang, Y., Sun, X., Zhang, Y., Zhou, J., & Feng, H. (2025). Trajectory Compression Algorithm via Geospatial Background Knowledge. Journal of Marine Science and Engineering, 13(3), 406. https://doi.org/10.3390/jmse13030406