
Research on Ellipse-Based Transient Impact Source Localization Methodology for Ship Cabin Structure


Abstract
1. Introduction
2. Localization Methods
2.1. Localization Method Based on Energy Curvature and Cumulative Error
- (1)
- The vibration signal ai(t) collected by the acceleration sensor is zero-averaged, and the zero-averaged signal bi(t) is obtained.
- (2)
- The maximum value of the absolute amplitude of the signal bi(t) after zero-averaging is normalized, the normalized signal si(t) can be calculated, and the range of the si(t) value is between −1 and 1.
- (3)
- For the preprocessed signal si(t), the acceleration sum of squares of the signal is calculated cumulatively, and the initial energy can be obtained.
- (4)
- Solve the first-order derivative of the accumulated energy twice consecutively to obtain the initial energy curvature .
- (5)
- Repeat the process from steps 3 to 4 four more times to obtain, respectively, the energy and the energy curvature for the first cycle; the energy and the energy curvature for the second cycle; the energy and the energy curvature for the third cycle; and the final energy after the fourth cycle.
- (6)
- The moment corresponding to the first non-zero value of is taken as the TOA of each sensor.
- (7)
- Divide the structural impact monitoring area into several grids and find the distance Li between each grid point and each sensor.
- (8)
- Construct the cumulative error function formula as shown in Equation (5), then define the cumulative error value corresponding to any grid point at a certain value of time tk in the time interval where the impact may occur, as follows:
- (9)
- Compare the cumulative error values at each sampling time tk in the possible time interval, and take the position (xi, yi) corresponding to the minimum cumulative error as the localization result and the time tk corresponding to the minimum cumulative error as the shock moment.
- (10)
- Define the impact probability of each grid point in the monitoring area, as shown in Equation (6), and take the grid position with the largest probability as the predicted impact coordinates, as shown in Figure 2.
2.2. Triangular Localization Method Based on Time-Reversal Virtual Focusing
- (1)
- Calculation of sensor vibration signal energy power: data inputs are selected from sensors with higher rankings in energy power.
- (2)
- Signal wavelet packet decomposition: Lamb waves are generated in the structure under excitation. The dispersive characteristics of Lamb waves result in a rich spectrum of frequency components within the original vibration signal, leading to significant frequency dispersion influence. Wavelet packet decomposition of signals is a time-frequency analysis technique that overcomes the frequency resolution limitations of traditional short-time Fourier transforms, providing localized time-frequency features of signals. Initially, a mother wavelet function that meets specific conditions is determined. Subsequently, the mother wavelet is scaled, translated, and convolved with the original signal to achieve decomposition at different scales and positions. Further, by recursively applying wavelet packet decomposition to both the high-frequency and low-frequency components of the signal, multi-level decomposition is realized to enhance frequency resolution. During the decomposition process, the signal is divided into approximation and detail components, forming a tree-like structure. Based on the analysis results, the signal is synthesized stepwise from the frequency subbands of interest until the original signal is reconstructed. Finally, by combining the wavelet packet decomposition coefficients and the inverse wavelet transform, the signal is converted from the frequency domain back to the time domain, yielding the reconstructed signal.
- (3)
- Time-reversed virtual focusing: this is a technique based on wave propagation characteristics, applicable for localizing impact sources. Initially, waves emitted from the impact source propagate through the medium and are captured by sensors. The captured signals are then processed and time-reversed, allowing them to travel backward along their original paths. The time-reversal operation reverses the wave propagation paths and reflection effects, achieving energy concentration at the impact source and thereby enabling imaging. Each sensor processes the received signal in reverse time order and re-emits it. By following a specific sequence (earlier arrivals are emitted later, and later arrivals are emitted earlier), the signals converge back to the impact source, achieving the reconstruction and localization of the impact source signal [33,34,35]. This is shown in Figure 3.
- (4)
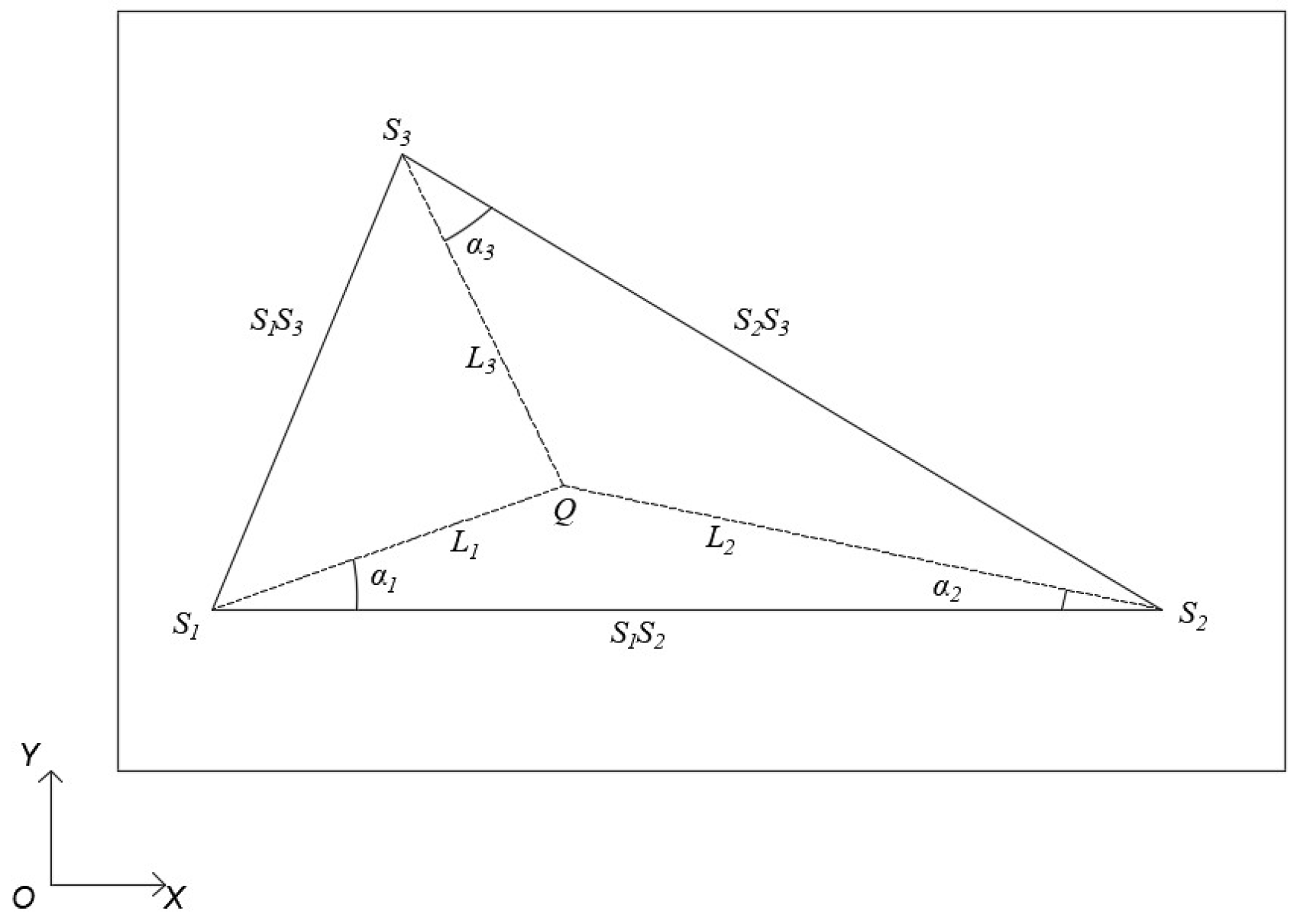
- Triangulation localization: This is a position determination method based on triangular geometric relationships, which locates the target by measuring the distances between the target point and three known reference points. The method relies on trigonometric principles, such as the sum of interior angles theorem and the sine rule, to establish equations containing wave velocity and solve for the target position. In anisotropic structures, where wave velocity varies in different directions, an estimated average wave velocity can be used for calculations. The peak time of the signal processed by time-reversed virtual focusing is used to determine the arrival time of stress waves at each sensor. The arrival time differences between different sensors are then calculated based on the stress wave arrival times. Finally, the average wave velocity is estimated by fitting the slope of the line using the sensor spacing and arrival time differences, and this velocity value is used to replace the wave velocity in the anisotropic structure of the region. This is shown in Figure 4.
2.3. Localization Method Based on Energy Correlation
- (1)
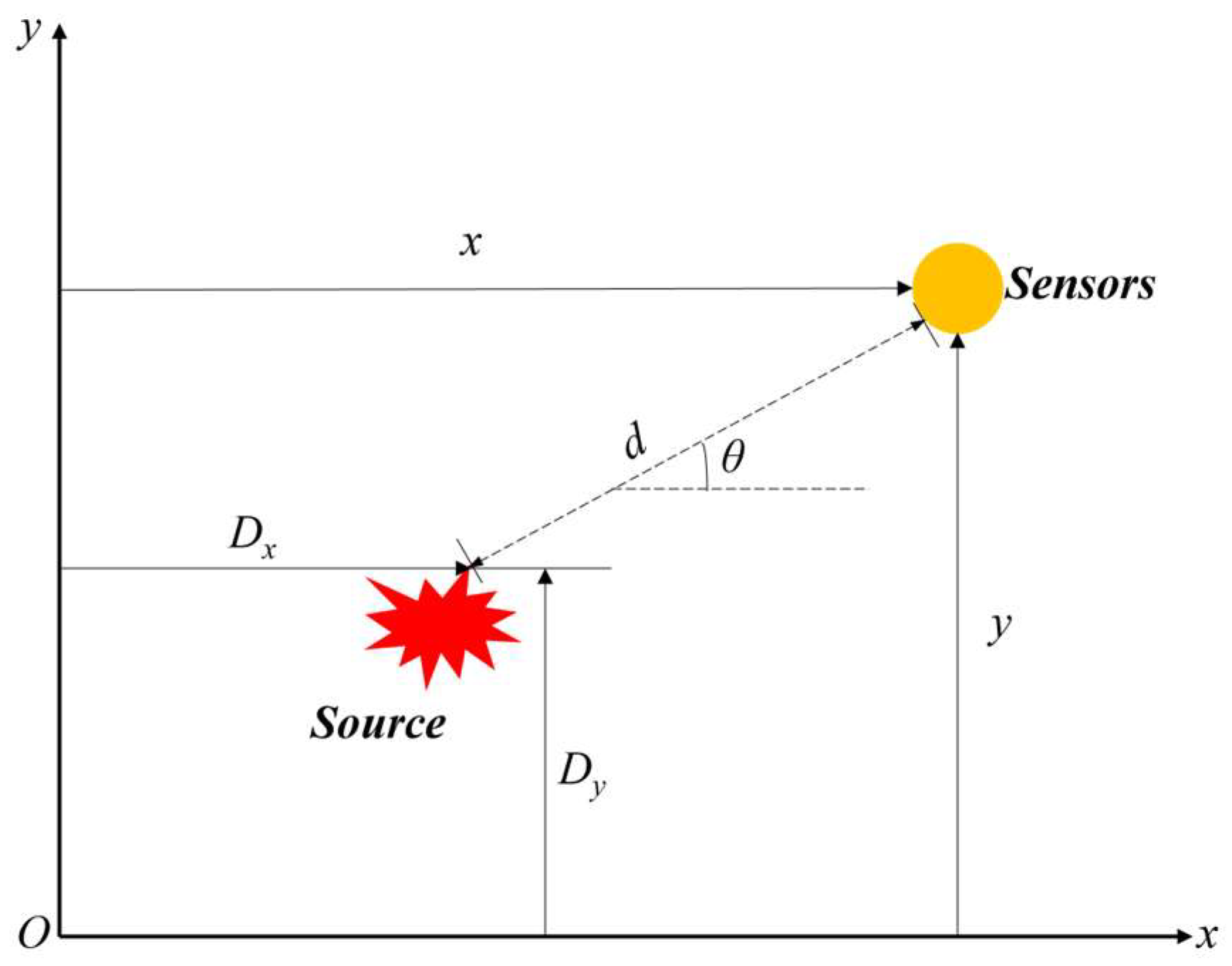
- The relationship equation between the signal energy (E) and the relative position (relative distance d, relative angle θ) between the sensor and the impact position are established. The relative distance d is shown in Equation (7), the relative angle θ is shown in Equation (8), the relationship equation is shown in Equation (9), and the diagram is shown in Figure 5, as follows:
- (2)
- Combine the established relational equations to set the minimization objective function σ as shown in Equation (10).
- (3)
- This study employs an optimization algorithm to initialize algorithm parameters, including maximum iterations, population size, and variable dimensions. Initial positions of individuals are randomly assigned, with upper and lower bounds constrained by physical context. During the iterative process, corresponding fitness values are continuously calculated. The algorithm checks if the maximum iteration count is reached. If so, the optimization process terminates with the target value as the optimal solution. If not, iterations continue [37,38,39].
- (4)
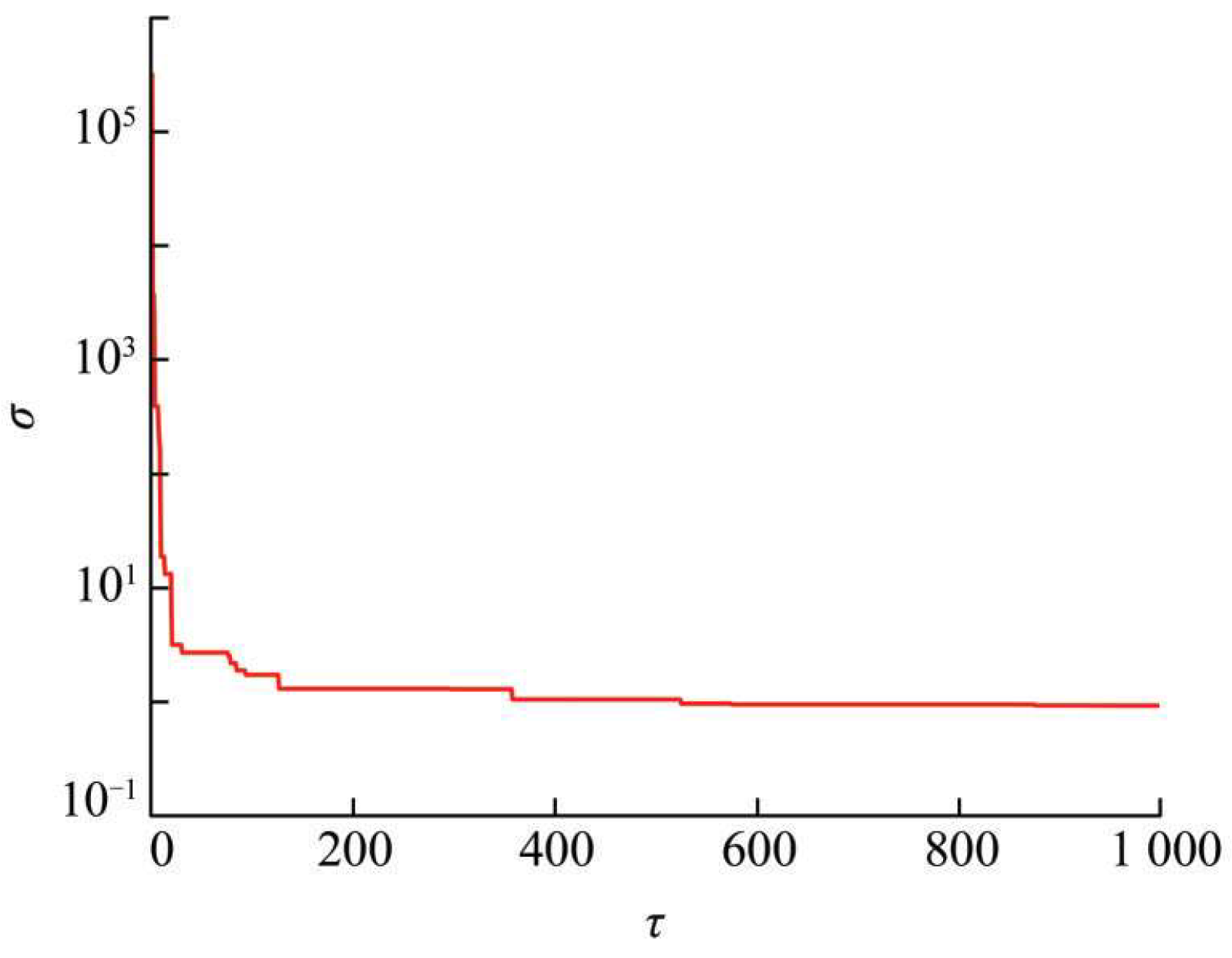
- Upon reaching the convergence condition, the objective function σ value approaches its minimum, allowing for the determination of parameters Dx and Dy at this point, which serve as the predicted coordinates of the impact source location. In the localization method based on energy correlation proposed in this manuscript, the algorithm can be terminated when the convergence condition is met. The iterative curve of the objective function’s fitness value is shown in Figure 6. During the iterative process (where convergence typically begins around 10 iterations, with the convergence condition set at 1000 iterations), the objective function σ value progressively approaches its minimum. This yields the parameters Dx and Dy, which serve as predicted coordinates of the impact source location.
2.4. Evaluation of Localization Methods
3. Experimental Verification
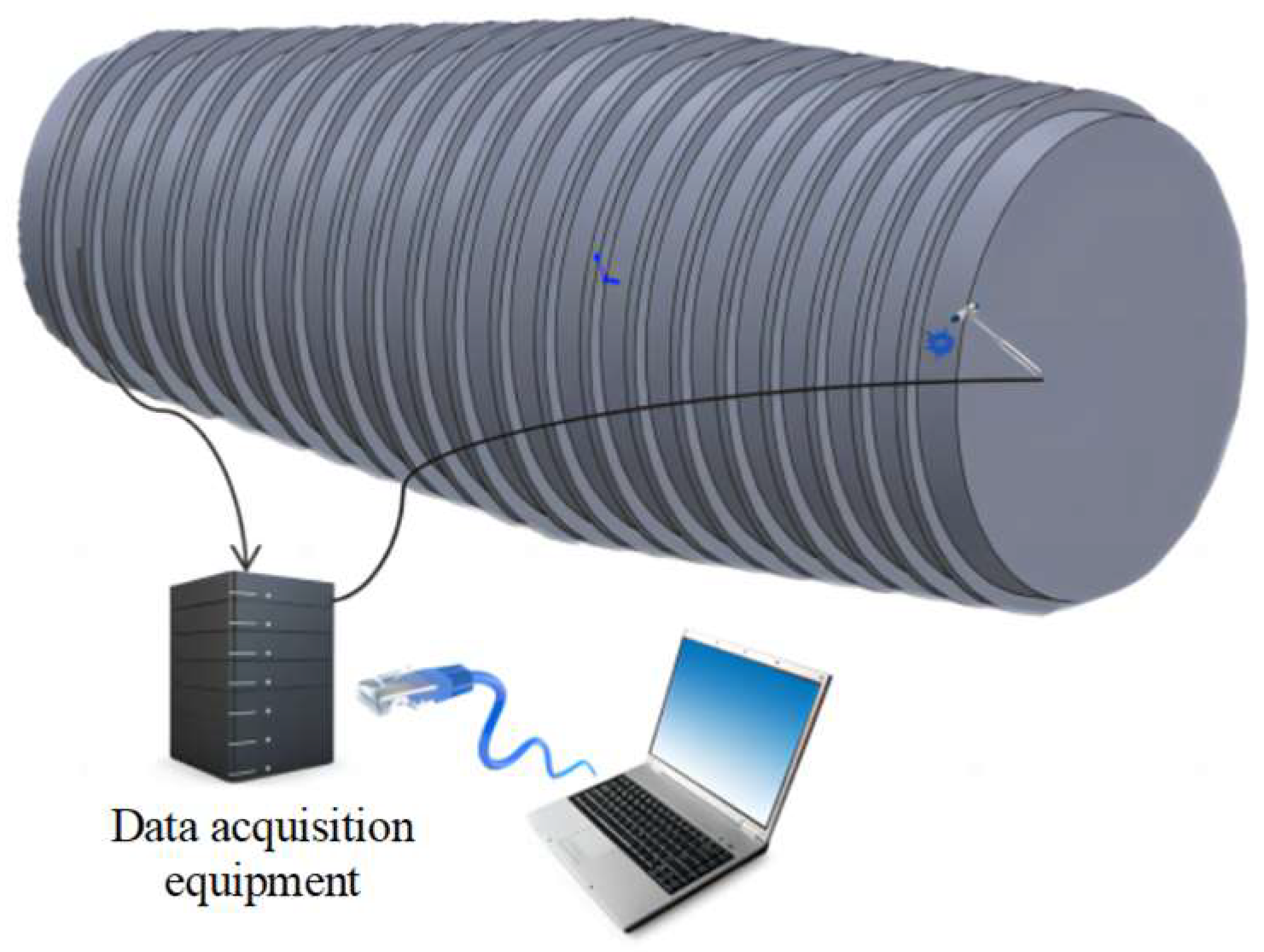
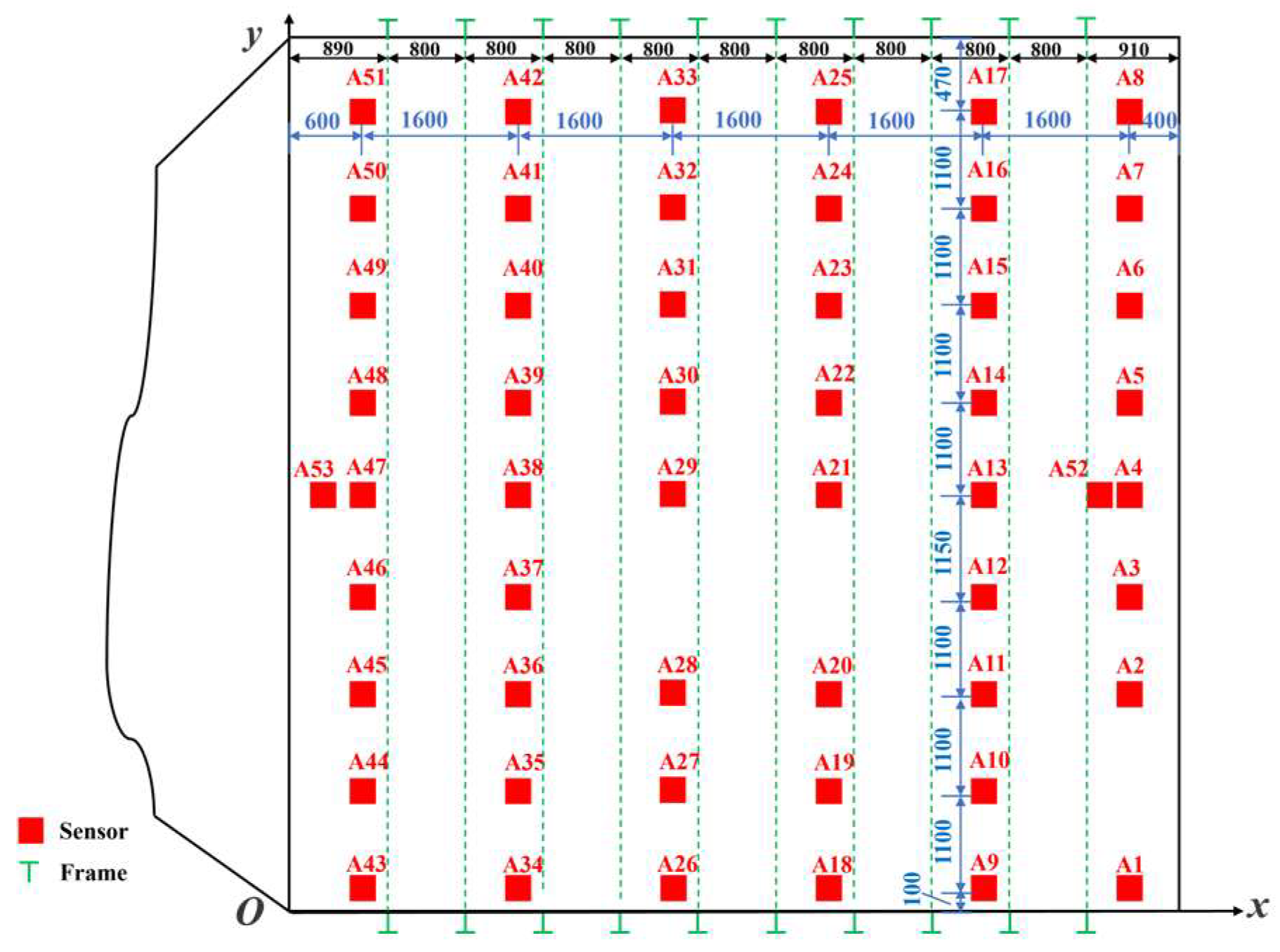
3.1. Experimental System and Sensor Layout
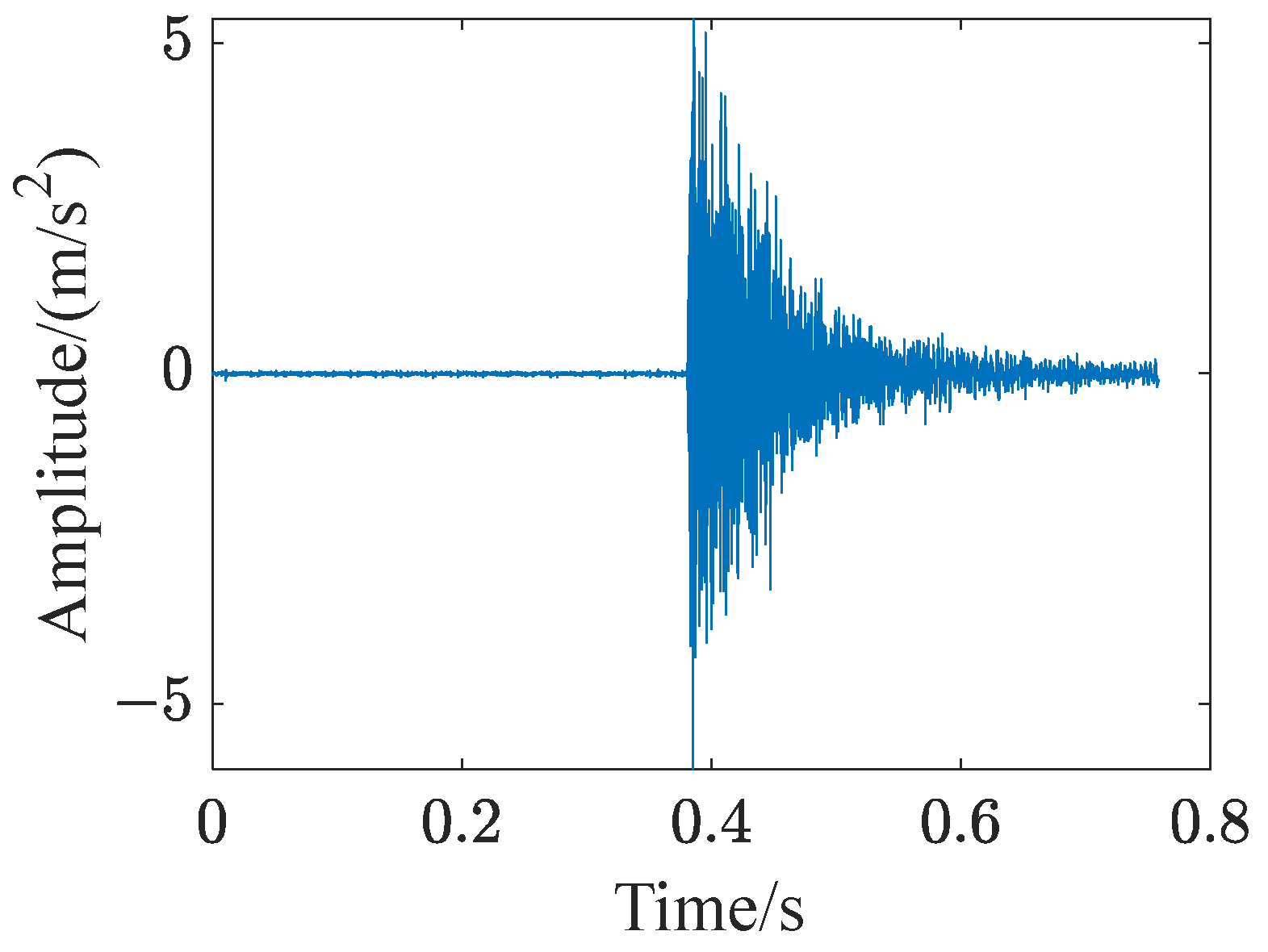
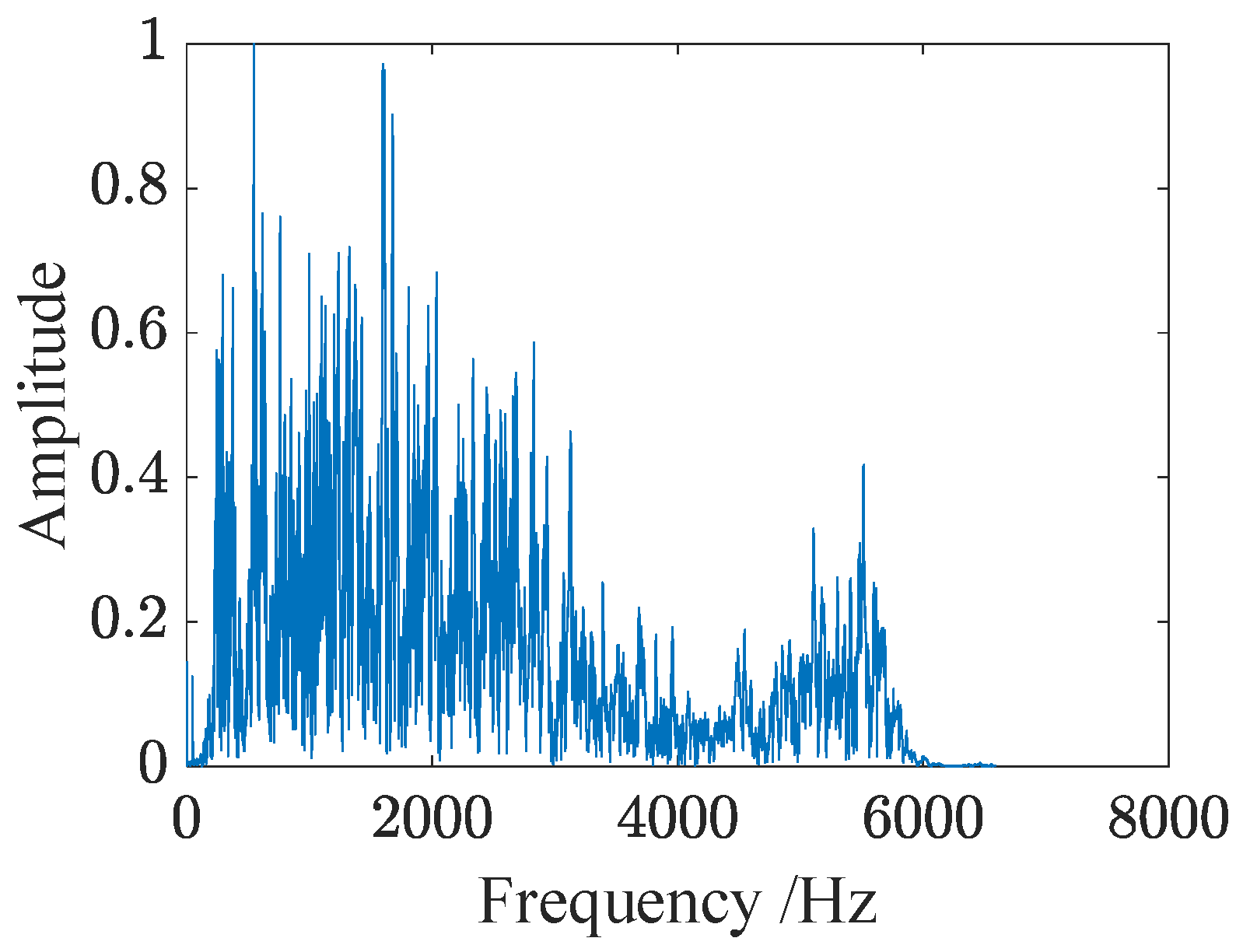
3.2. Signal Processing
4. Elliptical Region-Based Localization Techniques
4.1. Representation of Elliptical Regions
- (1)
- Parametric representation of the ellipse
- (2)
- Distance from a point to the ellipse
- (3)
- Minimization of distance
- (4)
- Distance calculation
- (5)
- Representation of error distance
4.2. Analysis and Discussion of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Relationship Between Signal Energy E and Distance d When Angle θ Is Constant
Appendix A.2. Relationship Between Signal Energy E and Angle θ When Distance d Is Constant
Appendix A.3. Relationship Between Signal Energy E and Angle θ, Distance d
References
- Sikdar, S.; Mirgal, P.; Banerjee, S. Low-velocity Impact Source Localization in a Composite Sandwich Structure Using a Broadband Piezoelectric Sensor Network. Compos. Struct. 2022, 291, 115619. [Google Scholar] [CrossRef]
- Goutaudier, D.; Osmond, G.; Gendre, D. Impact Localization on a Composite Fuselage with a Sparse Network of Accelerometers. Comptes Rendus Mec. 2020, 348, 191–209. [Google Scholar] [CrossRef]
- Chen, B.; Hei, C.; Luo, M.; Ho, M.S.C.; Song, G. Pipeline Two-dimensional Impact Location Determination Using Time of Arrival with Instant Phase (Toaip) with Piezoceramic Transducer Array. Smart Mater. Struct. 2018, 27, 105003. [Google Scholar] [CrossRef]
- Liu, J.; Hei, C.; Luo, M.; Yang, D.; Sun, C.; Feng, A. A Study on Impact Force Detection Method Based on Piezoelectric Sensing. Sensors 2022, 22, 5167. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, F.; Liu, M.; Xiao, W. A Two-step Localization Method Using Wavelet Packet Energy Characteristics for Low-velocity Impacts on Composite Plate Structures. Mech. Syst. Signal Process. 2023, 188, 110061. [Google Scholar] [CrossRef]
- Zargar, S.A.; Yuan, F.G. Impact Diagnosis in Stiffened Structural Panels Using a Deep Learning Approach. Struct. Health Monit. 2020, 20, 681–691. [Google Scholar] [CrossRef]
- Huang, J.; Wen, X.; Luo, J.; Luo, Q.; Long, Y.; Ren, L.; Liu, S. Localization Technique for Space Debris Impacted Spacecraft with PVDF Sensor. J. Astronaut. 2012, 33, 1341–1346. [Google Scholar]
- Li, R.; Xu, R.; Cui, L.; Yu, W. Research and Application of Abnormal Noise Source Positioning Experiment Based on Double Cylindrical Shell. Chin. J. Ship Res. 2017, 12, 140–146. [Google Scholar]
- Tobias, A. Acoustic-emission Source Location in Two Dimensions by an Array of Three Sensors. Non-Destr. Test. 1976, 9, 9–12. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Acoustic Emission Source Localization and Velocity Determination of the Fundamental Mode A0 Using Wavelet Analysis and a Newton-based Optimization Technique. Smart Mater. Struct. 2010, 19, 045027. [Google Scholar] [CrossRef]
- Sabzevari, S.; Moavenian, M. Sound Localization in an Anisotropic Plate Using Electret Microphones. Ultrasonics 2017, 73, 114–124. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Chen, Y.; Li, B.; Guan, K. Composite Plate Damage Detection Method Based on Lamb Waves Probability Weighted Imaging. Noise Vib. Control 2023, 43, 149–156. [Google Scholar]
- Wang, Q.; Yuan, S. No Baseline Time Reversal Imaging Method for Active Lamb Wave Structural Damage Monitoring. Chin. J. Aeronaut. 2010, 31, 178–183. [Google Scholar]
- Coles, A.; Castro, B.D.; Andreades, C.; Baptista, F.G.; Meo, M.; Ciampa, F. Impact Localization in Composites Using Time Reversal Embedded PZT Transducers and Topological Algorithms. Front. Built Environ. 2020, 6, 27. [Google Scholar] [CrossRef]
- Gorgin, R.; Wang, Z.; Wu, Z.; Yang, Y. Probability Based Impact Localization in Plate Structures Using an Error Index. Mech. Syst. Signal Process. 2021, 157, 107724. [Google Scholar] [CrossRef]
- Peng, T.; Cui, L.; Huang, X.; Yu, W.; Xu, R. Error-index-based Algorithm for Low-velocity Impact Localization. Shock Vib. 2022, 2022, 2703789. [Google Scholar] [CrossRef]
- Yang, L.; Deng, D.; Ma, S.; Xu, H.; Wu, Y.; Zhang, J. A Structural Impact Localization Method Based on Error Function. Patent CN202111296346.7, 29 October 2024. [Google Scholar]
- Shi, C. Research on Impact Location Method of Composite Structures Based on Error Function. Master’s Thesis, Dalian Jiaotong University, Dalian, China, 2023. [Google Scholar]
- Yang, L.; Deng, D.; Tian, G.; Gao, Z.; Bao, X.; Wu, Z. Probabilistic Imaging Impact Localization on Composite Stiffened Plate Based on Error Function. J. Vib. Meas. Diagn. 2024, 44, 88–93+199. [Google Scholar]
- Han, W.; Feng, K.; Luo, Y. Hyperbolic Location Damage Imaging Method Based on Ultrasonic Lamb Wave. Nondestruct. Test. 2021, 43, 46–50. [Google Scholar]
- Yan, S.; Li, B. Impact Localization of Thin Plate Structures Using PZT-array Based Passive Wave Method. IOP Publ. 2019, 283, 012040. [Google Scholar] [CrossRef]
- Yin, S. Study of Acoustic Source Localization Techniques Based on TDOA. Ph.D. Thesis, Jilin University, Changchun, China, 2020. [Google Scholar]
- Su, Y.; Yuan, S.; Zhou, H. Impact Localization in Composite Using Two-step Method by Triangulation Technique and Optimization Technique. J. Astronaut. 2009, 30, 1201–1206. [Google Scholar]
- Yan, S. The Impact Detection and Crack Identification Technology Based on the Active and Passive Method Integration. Master’s Thesis, Wuhan University, Wuhan, China, 2019. [Google Scholar]
- Migot, A.; Giurgiutiu, V. Impact Localization Using Sparse PWAS Networks and Wavelet Transform. Struct. Health Monit. Int. J. 2017, 391–398. [Google Scholar] [CrossRef]
- Zhao, W.; Xu, X.; Song, R.; Yang, M.; Qi, C. Research on Noise Source Locating for Car Door Rattle Based on Time Reversal Method. Automot. Eng. 2022, 44, 1954–1963. [Google Scholar]
- Qi, T.; Chen, Y.; Li, X.; Lu, C.; Li, Q. An Acoustic Emission Source Location Method Based on Time Reversal for Glass Fiber Reinforced Plastics Plate. Chin. J. Sci. Instrum. 2020, 41, 208–217. [Google Scholar]
- Wu, Z.; Zeng, X.; Deng, D.; Yang, Z.; Yang, H.; Ma, S.; Yang, L. Impact Localization on Stiffened Composite Plate Based on Adaptive Time Reversal Focusing. Acta Mater. Compos. Sin. 2024, 41, 507–520. [Google Scholar]
- Yu, W.; Xu, R.; Huang, X.; Wu, S.; Peng, T. A Structural Impact Localization Method Based on Energy Curvature and Cumulative Error. Patent CN202310686775.8, 5 September 2023. [Google Scholar]
- Huang, X.; Xu, R.; Yu, W.; Wu, S. Impact Localization in Complex Cylindrical Shell Structures Based on The Time-reversal Virtual Focusing Triangulation Method. Sensors 2024, 24, 5185. [Google Scholar] [CrossRef]
- Huang, X.; Xu, R.; Yu, W.; Cui, L.; Cheng, G. Impact Source Localization Method Based on Energy Correlation under Multiscale Models. J. Huazhong Univ. of Sci. Tech. 2024, 52, 127–134+184. [Google Scholar]
- Cai, J.; Shi, L.; Yuan, S. High Resolution Damage Imaging of Composite Plate Structures Based on Virtual Time Reversal. J. Compos. Mater. 2012, 29, 183–189. [Google Scholar]
- De Simone, M.E.; Ciampa, F.; Meo, M. A Hierarchical Method for the Impact Force Reconstruction in Composite Structures. Smart Mater. Struct. 2019, 28, 085022. [Google Scholar] [CrossRef]
- Yu, Z.; Xu, C.; Sun, J.; Du, F. Impact Localization and Force Reconstruction for Composite Plates Based on Virtual Time Reversal Processing with Time-Domain Spectral Finite Element Method. Struct. Health Monit. 2023, 22, 4149–4170. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Zhang, X.; Wang, Y. A Time Reversal Focusing Based Impact Imaging Method and Its Evaluation on Complex Composite Structures. Smart Mater. Struct. 2011, 20, 105014. [Google Scholar] [CrossRef]
- Sen, N.; Kundu, T. A New Signal Energy-based Approach to Acoustic Source Localization in Orthotropic Plates: A Numerical Study. Mech. Syst. Signal Process. 2022, 171, 108843. [Google Scholar] [CrossRef]
- Jalalah, M.; Hua, L.G.; Hafeez, G.; Ullah, S.; Alghamdi, H.; Belhaj, S. An Application of Heuristic Optimization Algorithm for Demand Response in Smart Grids with Renewable Energy. AIMS Math. 2024, 9, 14158–14185. [Google Scholar] [CrossRef]
- Hua, L.G.; Ali Shah, S.H.; Alghamdi, B.; Hafeez, G.; Ullah, S.; Murawwat, S.; Ali, S.; Khan, M.I. Smart Home Load Scheduling System with Solar Photovoltaic Generation and Demand Response in the Smart Grid. Front. Energy Res. 2024, 12, 1322047. [Google Scholar] [CrossRef]
- Alghamdi, H.; Khan, T.A.; Hua, L.G.; Hafeez, G.; Khan, I.; Ullah, S.; Khan, F.A. A Novel Intelligent Optimal Control Methodology for Energy Balancing of Microgrids with Renewable Energy and Storage Batteries. J. Energy Storage 2024, 90, 111657. [Google Scholar] [CrossRef]
- Ghorpade, S.; Zennaro, M.; Chaudhari, B. Survey of Localization for Internet of Things Nodes: Approaches, Challenges and Open Issues. Future Internet 2021, 13, 210. [Google Scholar] [CrossRef]
- Gao, F.; An, J.; Wu, Y. Impact analysis of platform positioning and orientation error on warship weapon target strike. Evol. Intell. 2024, 17, 171–176. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Impact Point | /m | /m | σx/m | σy/m | 3σx/m | 3σy/m | xreal/m | yreal/m | h/m | H/m |
|---|---|---|---|---|---|---|---|---|---|---|
| I1 | 7.90 | 4.82 | 0.25 | 0.14 | 0.75 | 0.42 | 7.60 | 4.94 | 0.26 | 0.00 |
| I2 | 8.03 | 4.88 | 0.38 | 0.63 | 1.14 | 1.89 | 7.60 | 5.24 | 0.68 | 0.00 |
| I3 | 8.03 | 5.88 | 0.38 | 0.43 | 1.14 | 1.29 | 7.60 | 5.64 | 0.67 | 0.00 |
| I4 | 6.85 | 4.35 | 0.20 | 0.40 | 0.60 | 1.20 | 6.80 | 3.95 | 0.51 | 0.00 |
| I5 | 6.48 | 3.87 | 0.18 | 0.08 | 0.54 | 0.24 | 6.80 | 4.25 | 0.18 | 0.18 |
| I6 | 7.21 | 5.10 | 0.29 | 0.15 | 0.87 | 0.45 | 6.80 | 4.94 | 0.23 | 0.00 |
| I7 | 5.98 | 4.67 | 0.68 | 0.23 | 2.04 | 0.69 | 6.80 | 5.24 | 0.06 | 0.00 |
| I8 | 6.08 | 5.27 | 0.78 | 0.68 | 2.34 | 2.04 | 6.80 | 5.64 | 1.42 | 0.00 |
| I9 | 5.91 | 4.24 | 0.19 | 0.79 | 0.57 | 2.37 | 6.00 | 3.95 | 0.48 | 0.00 |
| I10 | 5.68 | 4.09 | 0.38 | 0.14 | 1.14 | 0.42 | 6.00 | 4.25 | 0.24 | 0.00 |
| I11 | 6.36 | 4.81 | 0.26 | 0.14 | 0.78 | 0.42 | 6.00 | 4.94 | 0.23 | 0.00 |
| I12 | 6.31 | 5.37 | 0.21 | 0.09 | 0.63 | 0.27 | 6.00 | 5.24 | 0.10 | 0.00 |
| I13 | 6.54 | 5.24 | 0.44 | 0.22 | 1.32 | 0.66 | 6.00 | 5.64 | 0.20 | 0.00 |
| I14 | 5.68 | 5.30 | 0.23 | 0.00 | 0.69 | 0.00 | 5.20 | 4.94 | 0.36 | 0.36 |
| I15 | 5.20 | 5.42 | 0.10 | 0.49 | 0.30 | 1.47 | 5.20 | 5.24 | 0.30 | 0.00 |
| I16 | 5.30 | 5.10 | 0.00 | 0.85 | 0.00 | 2.55 | 5.20 | 5.64 | 0.10 | 0.10 |
| I17 | 5.59 | 3.77 | 0.29 | 0.42 | 0.87 | 1.26 | 4.40 | 3.95 | 0.33 | 0.33 |
| I18 | 4.98 | 4.58 | 0.48 | 0.23 | 1.44 | 0.69 | 4.40 | 4.25 | 0.30 | 0.00 |
| I19 | 4.50 | 5.32 | 0.80 | 0.12 | 2.40 | 0.36 | 4.40 | 4.94 | 0.02 | 0.02 |
| I20 | 4.90 | 5.01 | 0.40 | 0.45 | 1.20 | 1.35 | 4.40 | 5.24 | 0.67 | 0.00 |
| I21 | 4.74 | 5.38 | 0.24 | 0.07 | 0.72 | 0.21 | 4.40 | 5.64 | 0.07 | 0.07 |
| I22 | 3.58 | 5.39 | 0.48 | 0.09 | 1.44 | 0.27 | 3.60 | 4.94 | 0.18 | 0.18 |
| I23 | 3.54 | 5.66 | 0.17 | 0.30 | 0.51 | 0.90 | 3.60 | 5.24 | 0.37 | 0.00 |
| I24 | 3.96 | 5.95 | 0.54 | 0.01 | 1.62 | 0.03 | 3.60 | 5.64 | 0.28 | 0.28 |
| I25 | 2.83 | 4.68 | 0.73 | 0.73 | 2.19 | 2.19 | 2.80 | 3.95 | 1.46 | 0.00 |
| I26 | 2.01 | 5.31 | 0.19 | 0.01 | 0.57 | 0.03 | 2.80 | 4.25 | 1.08 | 1.08 |
| I27 | 2.60 | 5.34 | 0.50 | 0.04 | 1.50 | 0.12 | 2.80 | 4.94 | 0.28 | 0.28 |
| I28 | 2.50 | 5.18 | 0.40 | 0.27 | 1.20 | 0.81 | 2.80 | 5.24 | 0.71 | 0.00 |
| I29 | 2.50 | 5.34 | 0.40 | 0.11 | 1.20 | 0.33 | 2.80 | 5.64 | 0.02 | 0.00 |
| I30 | 1.44 | 4.22 | 0.67 | 0.27 | 2.01 | 0.81 | 2.00 | 3.95 | 0.50 | 0.00 |
| I31 | 2.10 | 4.70 | 0.00 | 0.75 | 0.00 | 2.25 | 2.00 | 4.25 | 0.10 | 0.10 |
| I32 | 2.10 | 4.90 | 0.00 | 0.06 | 0.00 | 0.18 | 2.00 | 4.94 | 0.10 | 0.10 |
| I33 | 2.10 | 5.19 | 0.00 | 0.24 | 0.00 | 0.72 | 2.00 | 5.24 | 0.10 | 0.10 |
| I34 | 1.80 | 5.69 | 0.30 | 0.09 | 0.90 | 0.27 | 2.00 | 5.64 | 0.21 | 0.00 |
| I35 | 2.02 | 4.50 | 0.72 | 0.05 | 2.16 | 0.15 | 1.20 | 4.94 | 0.30 | 0.30 |
| I36 | 1.73 | 5.01 | 0.37 | 0.05 | 1.11 | 0.15 | 1.20 | 5.24 | 0.10 | 0.10 |
| I37 | 1.03 | 5.52 | 0.28 | 0.06 | 0.84 | 0.18 | 1.20 | 5.64 | 0.06 | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Xu, R.; Yu, W.; Ming, X.; Wu, S. Research on Ellipse-Based Transient Impact Source Localization Methodology for Ship Cabin Structure. J. Mar. Sci. Eng. 2025, 13, 333. https://doi.org/10.3390/jmse13020333
Huang X, Xu R, Yu W, Ming X, Wu S. Research on Ellipse-Based Transient Impact Source Localization Methodology for Ship Cabin Structure. Journal of Marine Science and Engineering. 2025; 13(2):333. https://doi.org/10.3390/jmse13020333
Chicago/Turabian StyleHuang, Xiufeng, Rongwu Xu, Wenjing Yu, Xuan Ming, and Shiji Wu. 2025. "Research on Ellipse-Based Transient Impact Source Localization Methodology for Ship Cabin Structure" Journal of Marine Science and Engineering 13, no. 2: 333. https://doi.org/10.3390/jmse13020333
APA StyleHuang, X., Xu, R., Yu, W., Ming, X., & Wu, S. (2025). Research on Ellipse-Based Transient Impact Source Localization Methodology for Ship Cabin Structure. Journal of Marine Science and Engineering, 13(2), 333. https://doi.org/10.3390/jmse13020333