1. Introduction
Currently, traditional underwater robots can achieve deep-sea and shallow water exploration and operations. The extremely shallow water area (water depth 0–5 m) is a key exclusion zone for entering land from the ocean, with complex flow fields, variable sediment, and amphibious switching, greatly increasing the difficulty of robot operations [
1,
2]. Traditional floating or tracked robots are unable to carry out underwater operations in this area. Underwater hexapod robots (UHRs), due to their unique structural advantages, can operate stably in various underwater terrains and have good adaptability to complex underwater environments, making them an ideal platform for exploration and operations in extremely shallow water areas. Based on the application background of target disposal operation in an extremely shallow water environment, this paper focuses on the research of high-precision target positioning, i.e., the direction of arrival (DOA) estimation for environment awareness and operations.
Ultrasound array is employed to estimate the DOAs of the detection targets, suppress the effect of a sidelobe-interfering signal via reducing the energy leaks, enhance signal amplitude, and improve the detection probability of weak signals [
3,
4]. To achieve DOA estimation, different antenna array shapes are proposed, including circular array [
5], L-shaped arrays [
6], linear arrays [
7], and rectangular arrays [
8]. In this context, an L-shaped array, which consists of two orthogonal uniform linear arrays, offers the advantage of a more straightforward geometric structure and reduced coverage area when compared to rectangular and circular arrays [
9]. Research has shown that the L-shaped array outperforms the rectangular array, as it offers a 37% reduction in the Carmer–Rao bound (CRB) for DOA estimation [
10]. Consequently, it is commonly applied in 2D DOA estimation, which involves jointly estimating the elevation and azimuth angles of targets. In pursuit of this goal, several 2D DOA estimation algorithms have been formulated using the L-shaped array [
11,
12,
13].
Traditionally, according to an L-shaped array, the conventional beamforming (CBF) technology is the most well-known 2D DOA estimation method to obtain a 2D image of azimuth and elevation angles. It is well established that CBF is robust versus the nonideal array and underwater scenes like the steering vector errors and echo distortion. Nonetheless, the CBF has to face the great challenges of low resolution and a high sidelobe. Intuitively, a larger array aperture will lead to a higher resolution ability of 2D DOAs. However, due to the realistic constraints in UHRs, such as platform size and power consumption, the available array aperture is very limited. Therefore, novel array processing methods with super-directivity capabilities will be discussed in the following. Super-directivity implies that through a novel processing method, a small array using a super-resolution algorithm can match the DOA performance of a large array using CBF.
The conventional super-resolution methods for DOA estimation are typically classified into three groups, i.e., Capon-based minimum variance method (MMV) [
14], subspace-based multiple signal classification (MUSIC) [
15] and estimation signal parameter via rotational invariance technique (ESPRIT) [
16], and the maximum likelihood method. Among them, the MUSIC algorithm is the most widely used, which decomposes the covariance matrix of array echo signals to obtain two orthogonal subspaces of signal and noise, constructing spectral peaks. In the case that the SNR is satisfied, as snapshots increase, the estimation accuracy comes closer to the Cramer–Rao bound. However, when there are correlated sources in space or fewer snapshots, the signal cannot be distinguished. Although the problem of correlated sources can be solved by spatial smoothing, it will result in the loss of array aperture and reduce the resolution performance.
In recent years, some new methods have also emerged for the uniqueness of the DOA estimation problem. The DOA estimation can be equivalent to dividing the space of interest into grids. The incoming signals only occupy a few cells in the partition space, and the number of sources is small compared with the whole discrete space; thus, a spatial sparse signal is formed. Utilizing the sparse signal recovery (SSR) theory and spatial domain sparsity, compressed sensing (CS) can capitalize on the sparse nature of signal distributions [
17,
18,
19,
20]. Consequently, CS can use a small number of array elements to reach a resolution similar to that of a larger-aperture array. For the 2D DOA estimation mentioned above, the CS method can not only enhance the resolution but also suppress background noise levels significantly. There are four main categories for SSR-based DOA estimation methods, one of which is the matching pursuit methods [
17], the atomic norm-based methods [
18], the covariance-based methods [
19], and the sparse Bayesian learning (SBL) methods [
20]. However, the computation complexity in atomic norm-based methods, covariance-based methods, and SBL methods is too high to be suitable for UHRs.
The prominent advantage of CS is its high resolution with a small number of snapshots, and its special reconstruction way makes the method itself coherence resistant. However, when more snapshots are taken, the CS method cannot offer clear spectral peak estimates. Based on the above analysis, CS theory and MUSIC have their own advantages and disadvantages under specific conditions, and this separation between the two is the fundamental reason for the difficulties encountered in specific applications.
Considering the points discussed above, we propose a novel signal processing method, i.e., low-complexity 2D MUSIC of an L-shaped array based on SSR, to enhance the super-resolution capability. Lee [
21] believed that CS reconstructed the signal in a probabilistic way, while MUSIC constructed spatial spectrum in a deterministic way, and the study gave the relationship between the CS and MUSIC methods when the number of snapshots changed from less to more. In this paper, based on CS and MUSIC theory, we propose an SSR-MUSIC theory for 2D DOA estimation applications. The algorithm makes full use of the advantages of the two methods. Compared with the traditional methods, it has high resolution, can deal with coherent sources, and gives good results for different numbers of snapshots.
2. Array Signal Model
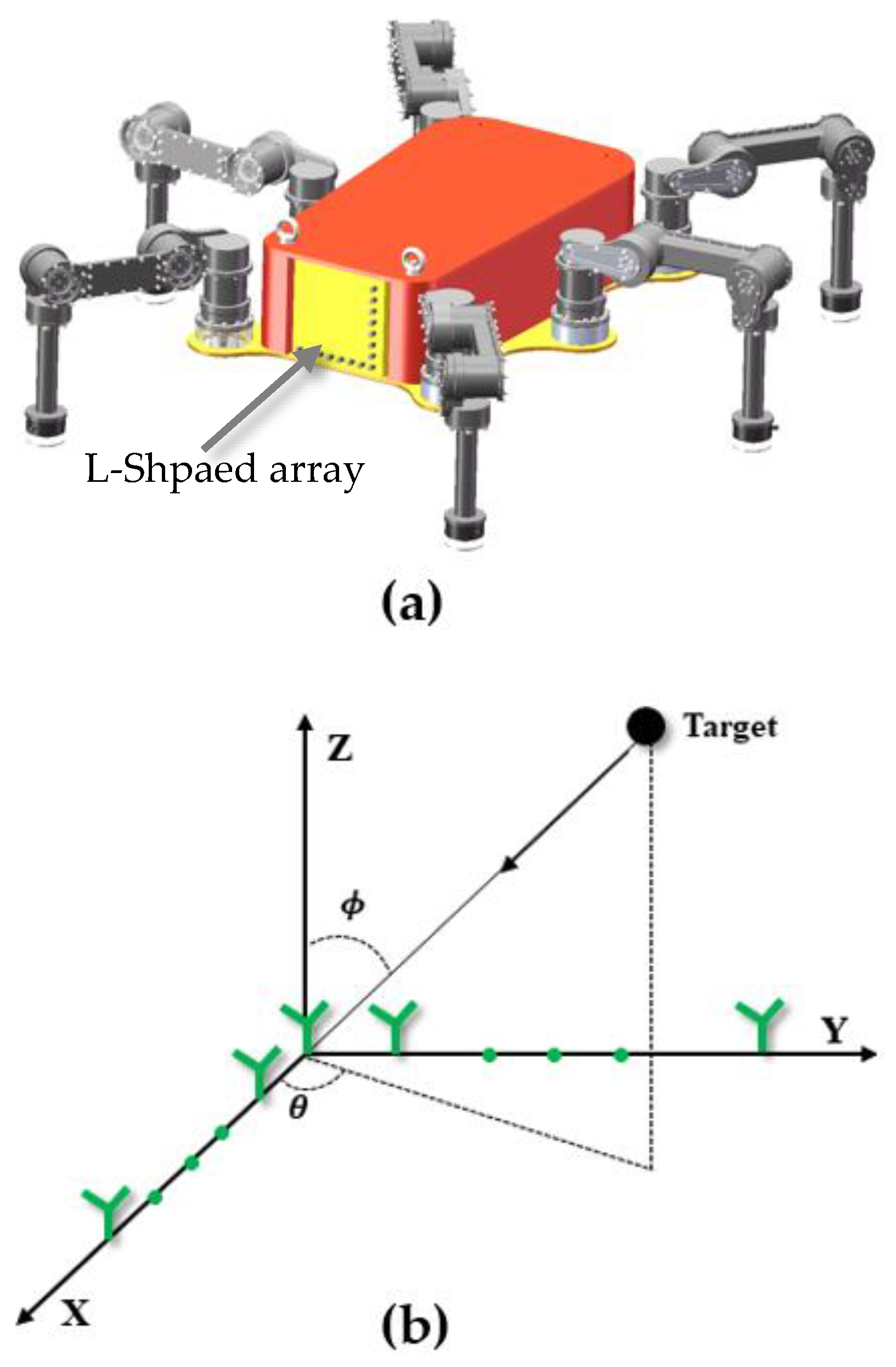
As depicted in
Figure 1, an L-shaped array with
omnidirectional antennas was considered, which was mounted on the front of an underwater hexapod robot. Two identical linear subarrays were positioned along the x-axis and y-axis with equal spacing, where
and
denoted the number of array elements along with the x-axis and y-axis, respectively. The sensor positioned at the origin was considered the reference point. The distance between sensors in each subarray was
, where
is defined as the wavelength. It was assumed that
narrowband signals from the far field hit this L-shaped array. The azimuth and elevation angles of the
th signal can be expressed as
and
, respectively. The azimuth angle is measured from the x-axis, while the elevation angle is measured from the y-axis. Thus, the array output at time
along the x-axis and y-axis can be expressed as
where
,
is the number of snapshots, and
denotes the signal waveform vector. The variables
and
are the additive white Gaussian noise along the x-axis and y-axis, respectively. The variables
and
denote the manifold matrices of the x-axis and y-axis subarrays, respectively, which are defined as
where
and
. Then, we sample the azimuth angle and elevation angle with uniform interval
to construct two finite grid sets
and
. Thus, the manifold matrices can be rewritten as
In general, the grid set contains far more elements than the numbers of array elements and signals, i.e.,
, and the set is overcomplete. According to model (5) and model (6), the sparse representation form of the L-shaped array can be given by
where
,
is the expanded signal amplitude matrix, and
indicates sparse signal vector corresponding to the grid sets. The non-zero entries of
indicate the true DOAs.
is white noise matrix.
3. Two-Dimensional DOA Estimation Algorithm Based on SSR
From the perspective of matrix theory, it is impossible to solve under-determined Equation (7) because the number of snapshots
is significantly less than the grid set length
. In this section, the SSR theory is introduced. The primary goal of the compressed sensing model focuses on reconstructing an unknown sparse signal amplitude matrix via a multiple measurement vector (MMV) method. With the assumption that
is
-sparse in common rows, minimizing
norm optimization can be used to address the problem of under-determined equations. The expression can be written as
where
denotes the estimated sparse solution,
is a small parameter (i.e., noise disturbance), and
indicates the
mixed norm. Thus, the estimated DOAs of the spatial signals can be decided by the non-zero position of the sparse solution.
According to the signal reconstruction theory of CS, four category methods based on SSR theory can be utilized to solve model (8). Considering both computational complexity and estimation accuracy, the greedy-type algorithm was used in this paper. However, as the number of snapshots increases, the CS method cannot give sharp spectral peak estimates, and the reconstruction algorithm of CS is very sensitive to the rank of the matrix in the noisy case. In order to solve the above problems, considering the characteristics of subspace decomposition algorithm that uses the space orthogonality instead of solving the rank of covariance matrix, we can also use this way to transform. Therefore, from the perspective of subspace construction, we proposed a joint 2D DOA estimation algorithm based on MUSIC and SSR methods named SSR-MUSIC algorithm, which can realize the super-resolution algorithm under any number of snapshots and coherent source.
is defined to denote the feature subspace, , denotes the number of non-zero element, region is supported, and is the th row of . When the observed signal is limited by the number of snapshots or coherent signals, the dimension of the estimated signal subspace is , which will lead to a part of the lost signal subspace where is no longer orthogonal to the noise space , , and . denotes the matrix consisting of the columns of whose indices of the corresponding columns belong to the set .
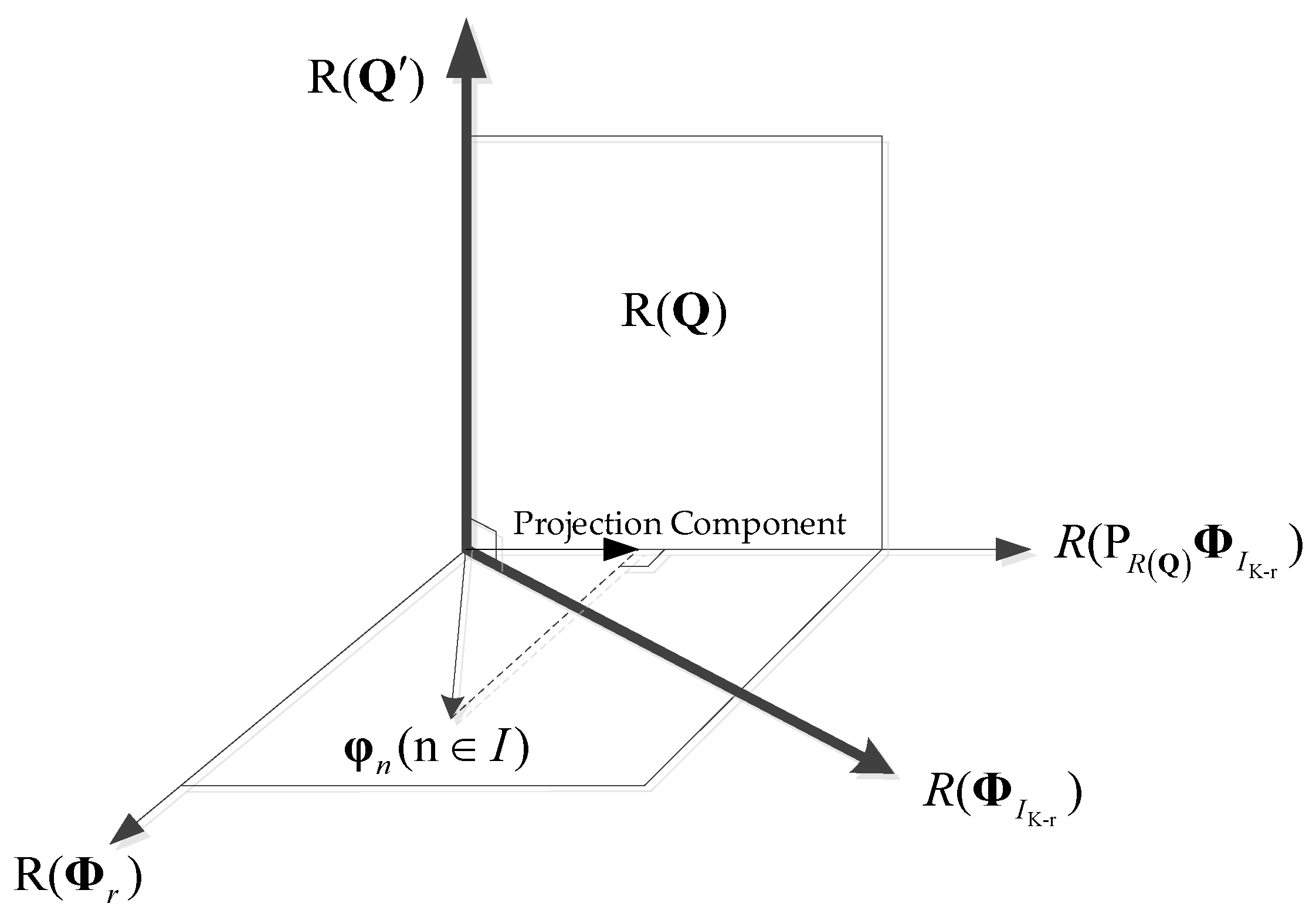
The basic principle and geometric representation of SSR-MUSIC are shown in
Figure 2. The principle of SSR-MUSIC algorithm is to use the SSR algorithm to estimate
column vector space subscripts, derive the projection of column vector space
in noise space
, and then construct a new noise subspace
. It makes the newly constructed space satisfy the orthogonality relation, i.e.,
. Thus, the non-orthogonal space caused by the lack of a snapshot number is converted to the two newly constructed orthogonal spaces
and
. The constructed form is shown as a thick solid line in
Figure 2 and then scanned through space to form sharp spectral peaks.
To estimate the subspace dimension
, a small threshold
is set as the judgment, and the search problem can be established as follows:
where
denotes the subspace distance and
is the constructed eigen matrix by eliminating noise perturbations, that is,
where
,
, and
indicate the maximum, minimum, and
th eigenvalues of the matrix. The following implementation process of the algorithm is closely related to the
, and it can be divided into the following two cases for
:
(1) When
, the mixed-norm strategy is exploited to improve the subspace estimation accuracy. Now, the
support region can be estimated by rewriting the model (8) as
where
,
, and
denotes the row index of sparse matrix
. Then, the problem (12) can be solved using gradient descent. Taking the partial derivatives of
with respect to
and
, we can obtain the following:
where
indicates number of iterations,
,
is the regularization parameter, and
The iteration stops if . The set of subscripts corresponding to the largest components in is chosen as the support region.
Then, the extended signal subspace is constructed and decomposed by singular value decomposition, that is
The new noise subspace
with the orthogonality relation can be written as follows:
To determine the remaining support region, the orthogonality of the noise subspace and the signal subspace is utilized, i.e.,
By now all the support region have been obtained, that is, the DOA information corresponding to all targets.
(2) When
, the signal subspace
in model (15) is empty, that is,
. Thus, the models (15)–(17) can be redefined as
Essentially, is a special case of . At this time, the algorithm is consistent with the orthogonal space condition of the MUSIC method.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}