Abstract
The maritime industry is rapidly advancing towards Industry 4.0 and the integration of autonomous shipping technologies. As the main propulsion system for autonomous vessels, marine engines play a critical role in ensuring the safety and reliability of operations at sea. Therefore, assessing the reliability and associated risks of marine engine systems is essential to prevent failures that could compromise autonomous navigation. This study conducts a comprehensive bibliometric analysis to provide up-to-date insights into the reliability assessment of marine engine machinery in the context of autonomous shipping. A total of 139 publications were retrieved from Web of Science and 133 from the Scopus database. The analysis addresses the key questions like (i) Which countries are leading research in this field? (ii) Which sources are most active in publishing this research? (iii) Which articles have had the greatest impact? (iv) Who are the most influential authors? (v) What keywords appear most frequently? (vi) What methodologies are commonly used? The findings indicate that this research area has attracted global attention, with Norway, the United States, Finland, Poland, and China being the most active contributors. However, Norway is leading in total output. Among the methodologies employed, the Bayesian network has been identified as the most widely used approach for reliability assessment of marine propulsion systems in MASS.
1. Introduction
The maritime industry is undergoing a significant transformation driven by the advancement of digital technologies and the shift towards autonomy, a movement commonly referred to as Maritime Industry 4.0. Among the most promising innovations in this space is the Maritime Autonomous Surface Ship (MASS), which aims to improve safety, reduce operational costs, and enhance the efficiency of maritime transportation. Recognizing the growing interest and potential of MASS, the International Maritime Organization (IMO) has completed a Regulatory Scoping Exercise (RSE) to assess how existing international conventions apply to autonomous operations at sea. Autonomous ships are generally categorized into four levels based on the degree of automation and human involvement:
Level 1: Ships with automated processes that assist human decision-making, with crew still on board.
Level 2: Remotely controlled ships with partial crew on board for emergency response.
Level 3: Remotely operated ships without any crew on board.
Level 4: Fully autonomous ships capable of performing all operations without human intervention.
To ensure the safe and reliable operation of fully autonomous vessels (Level 4), a range of regulatory, technological, and operational challenges must be addressed. Key requirements include maintaining a continuous and stable propulsion power supply, ensuring structural integrity, preventing fires and flooding, enabling situational awareness, and facilitating effective communication with shore-based control centers and nearby vessels. As human error is responsible for nearly 80% of maritime accidents [1], automation holds the potential to significantly enhance maritime safety. However, removing human presence also presents new risks, particularly in maintaining propulsion reliability, detecting failures, and making decisions under dynamic sea conditions. Therefore, the reliability assessment of critical systems, especially the marine engine, becomes essential for ensuring the safe operation of MASS.
Despite growing research interest in MASS, most existing studies focus on navigation, control systems, and regulatory aspects, with limited attention paid to the reliability of propulsion and machinery systems. Past incidents such as engine failure due to a clogged filter [2] highlight the consequences of neglecting reliability engineering in automated maritime operations. Several methodologies have been explored for reliability assessment in MASS, including Bayesian Networks (BN), Fault Tree Analysis (FTA), Event Tree Analysis (ETA), and Failure Modes and Effects analysis (FMEA) [3,4,5,6,7]. While valuable, these studies are fragmented, and a comprehensive synthesis is lacking.
To address this gap, the present study conducts a bibliometric analysis and systematic literature review on the reliability assessment of marine propulsion systems in MASS. Using data from the Web of Science and Scopus, we analyze publication trends, author keyword networks, and bibliographic coupling to identify current research hotspots, methods employed, and future directions. This study contributes to a better understanding of the state-of-the-art reliability research for marine propulsion systems in MASS and provides insights for scholars, practitioners, and policymakers aiming to advance safe and sustainable autonomous maritime operations.
2. Materials and Methods
The bibliometric analysis was conducted in three main steps as illustrated in Figure 1.
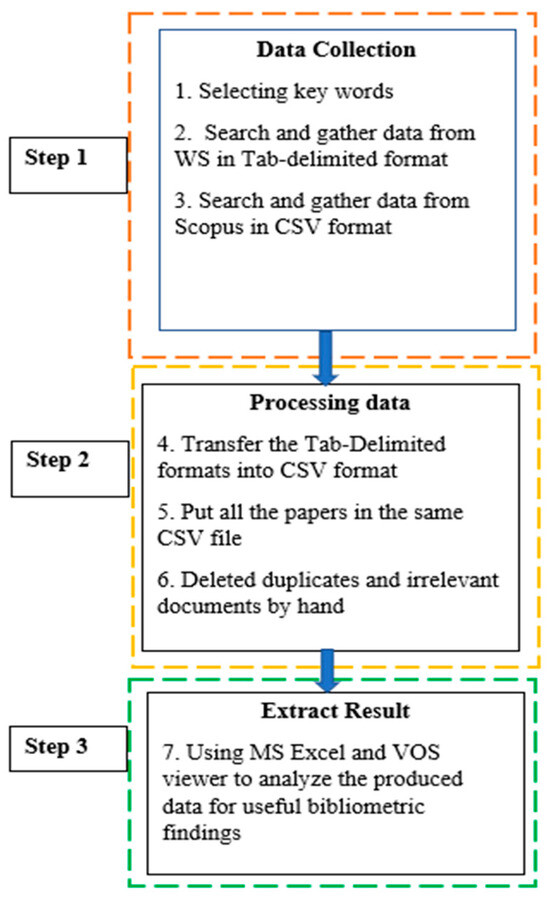
Figure 1.
Retrieval process of this study.
Step 1: Keyword Identification and Literature Search
Relevant keywords were first identified to search the Web of Science (WoS) and Scopus databases. Both databases offer distinct advantages, such as comprehensive coverage of scholarly content and efficient data storage capabilities [8]. The selected keyword combinations included:
- “reliability AND machinery AND maritime autonomous surface AND ships”
- “reliability AND autonomous AND ships”
- “reliability AND marine engine AND maintenance AND autonomous AND ships”
- “reliability AND marine engine AND autonomous AND ships”
Initial search results varied across databases:
- For “reliability AND machinery AND maritime autonomous surface AND ships”: WoS returned 3 results; Scopus returned 7.
- For “reliability AND autonomous AND ships”: WoS returned 127 results; Scopus returned 115.
- For “reliability AND marine engine AND maintenance AND autonomous AND ships”: WoS returned 3 results; Scopus returned 4.
- For “reliability AND marine engine AND autonomous AND ships”: WoS returned 6 results; Scopus returned 60.
Step 2: Data Cleaning and Integration
The papers retrieved from WoS were exported in Tab-delimited format, while Scopus results were downloaded in CSV format. The WoS files were converted to CSV, and all records from both databases were merged into a single CSV file. Duplicate and irrelevant entries were removed. The inclusion and exclusion criteria were based on publication type, relevance to the reliability assessment of marine propulsion systems for MASS, language (English), and availability of the full text. After cleaning, 56 unique papers from WoS and 60 from Scopus were retained.
Step 3: Data Analysis
The final dataset was analyzed based on publication type and year of publication. Further bibliometric analysis was carried out using VOSviewer software version1.6.5 to visualize relationships and research trends.
Table 1 shows that journal articles represent the highest proportion of document types, accounting for 55% of the total. This is followed by conference papers, which make up 35%. In contrast, book chapters and letters each represent the lowest share, contributing only 1.25% of the total.

Table 1.
Distribution of Documents by Publication Type.
In addition to document type, the publications were also grouped based on their year of publication. The dataset spans from 1974 to 2021, reflecting the growing interest in autonomous ships, particularly over the last two decades. As illustrated in Figure 2, the number of publications remained relatively low (fewer than 10 documents) during the periods 1974–1997, 2003–2009, and 2013–2016. However, a sharp increase occurred between 2017 and 2021, during which 64 papers were published, indicating a surge in research activity in this field.
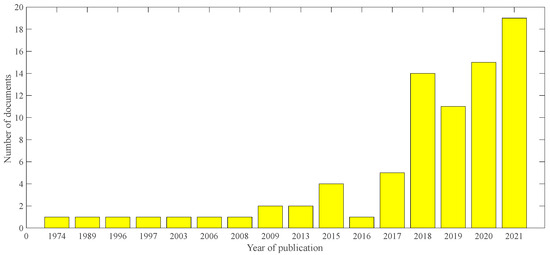
Figure 2.
Distribution of papers by publication year.
3. Results
In this study, VOSviewer was used to conduct a detailed bibliometric analysis of the papers collected from the Web of Science (WoS) and Scopus databases. The following analyses were performed:
- Bibliographic coupling of countries, organizations, sources, publications, and authors
- Co-occurrence analysis of author keywords
- Citation analysis of authors
These analyses provided deeper insights into research trends, influential contributors, and the overall structure of the literature on autonomous ships.
3.1. Bibliographic Coupling of Countries
Bibliographic coupling by country is a bibliometric method used to analyze and visualize the relationships between countries based on the references cited in their publications. It shows how countries research outputs are connected through shared citations rather than direct collaboration.
Figure 3 and Table 2 present the bibliographic coupling analysis of countries of first author, with a minimum publication threshold of one. Out of 20 countries, 13 met this criterion. The analysis includes the number of publications, total citations, and total link strength for each country.
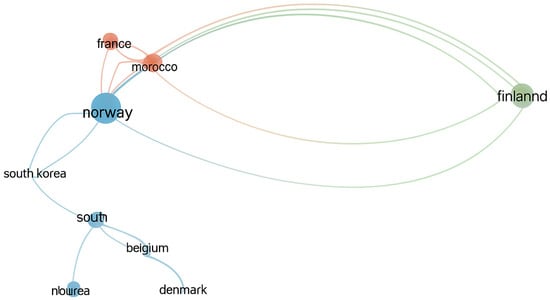
Figure 3.
Bibliographic Coupling Analysis by Country.
Table 2.
Country Bibliographic Coupling: Documents, Link Strength, and Citations.
Norway ranks highest with 27 publications, 934 citations, and a total link strength of 457. This is followed by the United States (10 publications; 160 citations; link strength 357), the Netherlands (4; 125; 98), Finland (9; 518; 79), and Canada (4; 82; 77). Other notable countries include Denmark (1; 11; 49), France (6; 69; 39), Australia (2; 5; 37), the United Kingdom (5; 158; 37), Belgium (2; 65; 18), Japan (2; 8; 16), Morocco (6; 22; 6), China (8; 332; 3), Indonesia (1; 2; 3), and South Korea (4; 25; 3).
Figure 4 also visualizes the clustering of countries using different colors, indicating stronger citation relationships within the same cluster. The largest cluster includes Norway, South Korea, and the United States. The second-largest cluster comprises the Netherlands, Finland, and Australia. A smaller cluster includes Belgium, Canada, Denmark, France, Japan, and Morocco.
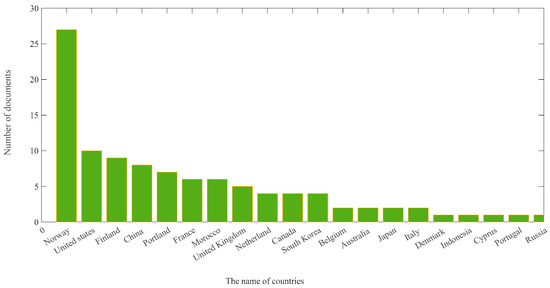
Figure 4.
Contribution by country.
3.2. Bibliographic Coupling of Organizations
In bibliographic coupling analysis of organizations, coupling indicates the degree of similarity or connection between organizations based on the references their publications cite. Organizations are considered bibliographically coupled when they cite the same references, with stronger coupling corresponding to a greater number of shared references.
Figure 5 presents the bibliographic coupling analysis of organizations, including 46 institutions grouped into seven distinct clusters. For each organization, the number of publications, total citations, and total link strength are provided. The Department of Marine Technology in Norway stands out as the most influential organization in this field, with 2 publications, 77 citations, and a total link strength of 254. It is followed by the Department of Marine Technology at the Norwegian University of Science and Technology (NTNU), also in Norway, with 2 publications, 32 citations, and a link strength of 169. Other notable organizations include the University of California (1 publication; 13 citations; link strength 117), the Korea Research Institute of Ships and Ocean Engineering (1; 1; 139), and the Department of Mechanical and Electrical Engineering in Denmark (1; 11; 89).
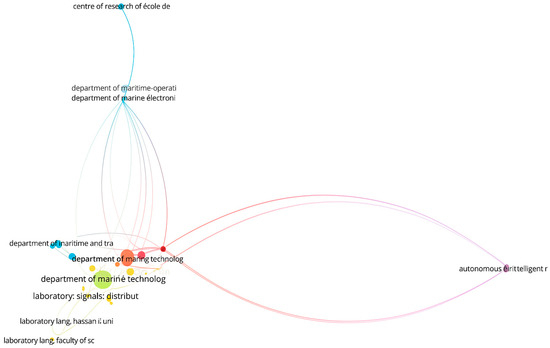
Figure 5.
Bibliographic coupling analysis of organization.
3.3. Bibliographic Coupling of the Sources
Density visualization of sources by bibliographic coupling depicts the connections among research sources according to the references they have in common. Figure 6 presents the bibliographic coupling of the sources, focusing on the number of documents published. Figure 7 and Figure 8 provide density visualizations based on bibliographic coupling data. To evaluate the importance of each journal, three key metrics were considered: the number of publications, the number of citations, and the total link strength. Among these, the number of publications is regarded as the most significant indicator, followed by citations and then total link strength. Safety Science stands out as the most influential source, with 4 publications, 169 citations, and a total link strength of 45. Other notable sources include Ocean Engineering (2 publications; 84 citations; link strength 31), PSAM 2018 Probabilistic Safety (1; 14; 24), Safety and Reliability—Safe Society (3; 36; 22), Proceedings of the 30th European (1; 0; 18), Proceedings of the Institute of (1; 32; 18), Applied Sciences Switzerland (3; 12; 17), Reliability Engineering and System Safety (2; 28; 17), Proceedings of the International (1; 0; 6), and 2017 2nd International Conference (2; 14; 5).
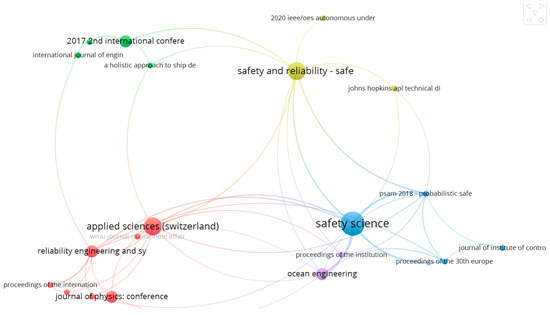
Figure 6.
Bibliographic coupling analysis of sources.
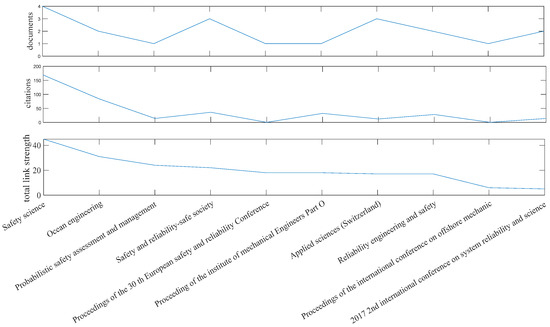
Figure 7.
Distribution of documents, citations, and link strength by journal.
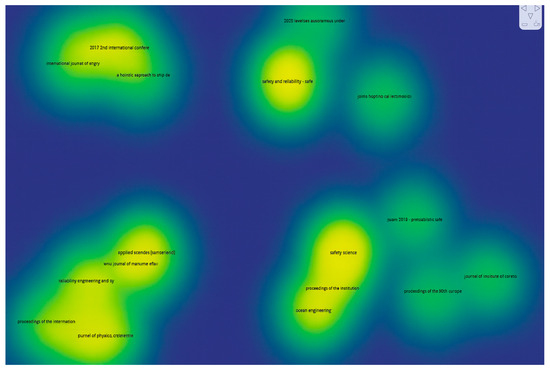
Figure 8.
Density visualization of sources by bibliographic coupling.
3.4. Bibliographic Coupling of the Publications
Figure 9 presents the bibliographic coupling analysis of the publications, while Table 3 summarizes key metrics such as the number of citations and total link strength for each document. Among these metrics, the number of citations is considered more significant than the total link strength. The most influential paper is reference [9], with 87 citations and a total link strength of 32. It is followed by [10] (13 citations; 29 link strength), [11] (14; 24), [12] (66; 23), [13] (32; 18), [14] (18; 16), [15] (3; 12), [16] (17; 10) and [17] (0; 18).
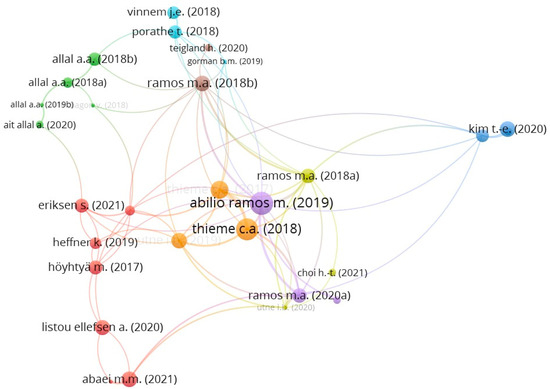
Figure 9.
Bibliographic coupling analysis of publication.
Table 3.
Number of citations and total link strength for each publication.
The most cited paper [9] reviews operations of Maritime Autonomous Surface Ships (MASS) in scenarios where few or no humans are on board, highlighting how these ships are controlled remotely from shore-based centers to prevent collisions. The second most cited paper [18] examines the impact of various risk factors on ship collisions and groundings. The author emphasizes that the safety standards for automated ships should be at least as high as those for conventional vessels, noting that full automation will not be universal in the foreseeable future.
3.5. Bibliographic Coupling Analysis of Authors
Figure 10 shows the bibliographic coupling analysis of authors, and Figure 11 compares authors by publications, citations, and link strength. The most influential author is Utne, I.B., with 11 publications, 269 citations, and a total link strength of 1525. The second most influential is Mosleh, A., who has 5 publications, 134 citations, and a total link strength of 768. Although Mansouri, K. has more publications (6), the lower citation count (22) and link strength (523) place him behind Mosleh in overall impact. Other notable authors include: Thieme, C.A. (3 publications; 111 citations; 734 link strength), Ramos, M.A. (4; 47; 589), Youssfi, M. (6; 22; 523), Choi, H.-T. (1; 1; 345), Choi, J. (1; 1; 345), Jung, J. (1; 1; 345), Kang, M. (1; 1; 345), Kim, H. (1; 1; 345).These results indicate that although some authors have fewer publications, they may still exhibit significant influence through strong citation counts and high link strength.
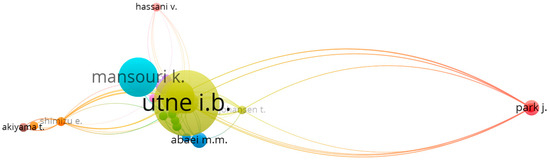
Figure 10.
Bibliographic coupling analysis of authors.
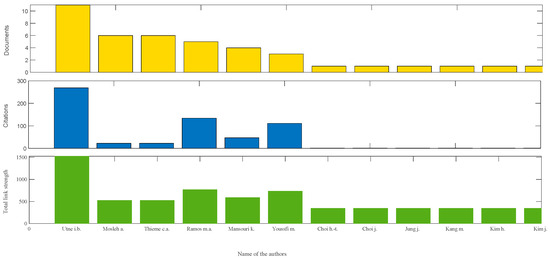
Figure 11.
Comparison of authors based on publications, citations, and link Strength.
3.6. Co-Occurrence of Author Keywords
Co-occurrence analysis of author keywords, shows the relationships or connections between keywords based on their simultaneous appearance in documents.
Figure 12 illustrates several thematic clusters representing the major research domains within MASS. The blue cluster focuses on autonomous ship operations, safety, and risk assessment, emphasizing frameworks such as Bayesian networks and fault tree analysis for reliability evaluation. The green cluster represents risk and safety management systems, addressing human reliability, operational safety, and hazard analysis. The orange cluster encompasses collision risk and avoidance strategies, highlighting autonomous navigation, sensor integration, and decision-making algorithms. The yellow cluster relates to reliability engineering and system modeling, dealing with autonomous piping systems and engineering reliability approaches. The purple cluster covers human factors and communication aspects, reflecting the integration of human-in-the-loop considerations in autonomous operations. Finally, the light blue cluster concentrates on fault diagnosis, prognostics, and health management (PHM) for system condition monitoring and predictive maintenance.
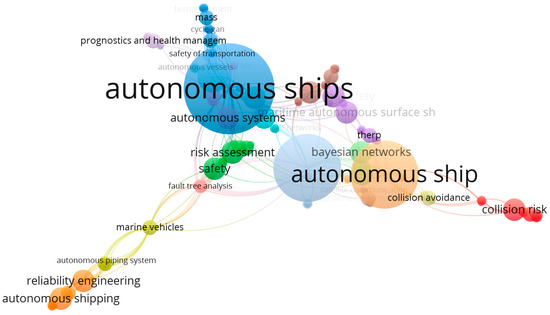
Figure 12.
Co-occurrence analysis of author keywords.
Together, these clusters illustrate the evolution of research across reliability modeling, MASS propulsion systems, fault diagnosis, and risk assessment in autonomous maritime operations.
Table 4 presents the total link strength of each keyword based on co-occurrence analysis. The most frequently occurring keyword is “autonomous ship”, which appears 21 times and has a total link strength of 93. This is followed by “reliability” (9 occurrences; 48 link strength), “marine vehicles” (2; 24), “safety” (3; 20), “reliability engineering” (3; 19), “Bayesian networks” (3; 18), “collision risk” (3; 18), “conventional ship” (3; 18), “navigation” (2; 16), “autonomous systems” (3; 15), and “fault tree analysis” (2; 14). Different colors in Figure 12 represent different keyword clusters. In total, 18 clusters are identified, indicating thematic groupings based on keyword co-occurrence relationships.
Table 4.
Total link strength of author keywords based on co-occurrence analysis.
3.7. Author Citation Analysis
Figure 13 and Table 5 present a detailed citation analysis of the most influential authors in the field, highlighting their publication output, citation counts, and total link strength. Among the authors, Utne I.B. stands out as the most prolific and influential, with 11 publications, 269 citations, and a total link strength of 21. This indicates a strong research presence and significant impact within the academic community. Mansouri K. and Youssfi M. both have 6 publications and 22 citations each, with total link strengths of 20, showing consistent but comparatively moderate influence. Interestingly, Mosleh A. has fewer publications (5) but a notably higher citation count (134), suggesting that their work is highly regarded and frequently referenced despite a smaller publication volume.
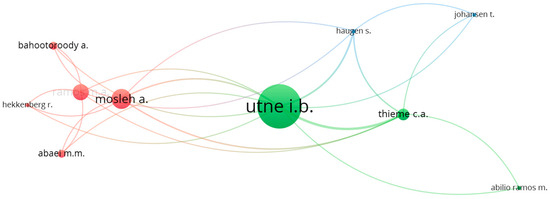
Figure 13.
Citation Analysis of Authors.
Table 5.
List of influential authors with their publications and total link strength.
Other authors such as Thieme, C.A. (3 publications, 111 citations) and Wrobel, K., Montewka, J., Kujala, P. (2 publications, 197 citations) demonstrate high citation impact relative to their publication counts, emphasizing the quality and influence of their research contributions. Some authors like Park, J. and Melhaoui, Y. have fewer citations and lower total link strengths, indicating emerging or more specialized research profiles. This analysis reveals a range of author contributions, where publication volume does not always directly correlate with citation impact or link strength, underscoring the importance of both quantity and quality in academic influence.
Table A1 in Appendix A provides an overview of the number of articles selected for this study, all of which are directly relevant to the research objectives. These articles were chosen based on their alignment with the study’s scope and focus areas. Following the identification and selection of these articles, the subsequent step involves a thorough analysis to determine the number and types of methods or techniques employed across the literature. This analysis will help in understanding the methodological trends, gaps, and common practices within the field, thereby contributing to a more comprehensive and evidence-based foundation for the current study.
Figure 14 illustrates the various methodologies employed in the reliability and risk assessment of marine propulsion system in MASS. Table 6 summarizes the most frequently used methods/tools and their occurrence frequency. The Bayesian Network method appears most often (11 occurrences), followed by Human Factor (3 times) and Human-System Interaction. Below is a comparative overview of the advantages and disadvantages of the most used methods:
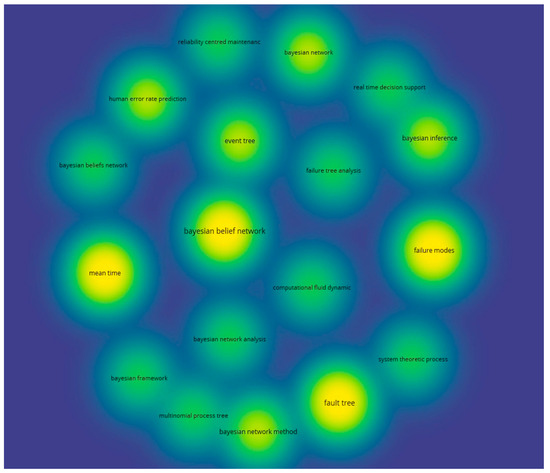
Figure 14.
Most Commonly Used Methodologies and Tools for Reliability Assessment of marine propulsion system in MASS.
Table 6.
Most frequently used methodologies and tools with their occurrence frequency.
The Bayesian Network method is widely valued for its ability to probabilistically model complex systems. It excels at predicting the frequency of disruptive events and estimating the overall failure rates of autonomous systems. Its pictorial and modular nature allows for intuitive understanding and easy updating as new data becomes available. This adaptability is particularly useful for reliability assessment of marine propulsion systems in MASS, where evolving operational conditions and interdependencies are common. However, Bayesian Networks struggle when dealing with very small probabilities and face limitations on the types of statistical dependencies and distributions they can accommodate. Moreover, as the number of variables and potential states increases, the computational complexity can grow exponentially, making the model harder to manage and slower to compute [19].
Human Factor methodologies focus on the role and influence of human operators within semi-autonomous or supervisory control frameworks. They aim to assess workload, decision-making processes, situational awareness, and how human error might impact system reliability. This perspective is crucial because, despite the autonomy of MASS, human oversight and interaction remain integral. However, capturing human behavior quantitatively is inherently challenging due to its variability and context dependence. Often, assessments rely on qualitative or semi-quantitative data, which introduces subjectivity and may limit the precision of risk evaluations.
Mean Time to Failure (MTTF) and Mean Time to Repair (MTTR) feed into reliability assessment methods like RBD, FTA, and FMEA. Measures such as MTTF and MTTR are classic reliability metrics offering straightforward insights into system performance and maintainability. These metrics are particularly useful for procurement decisions and maintenance scheduling by indicating expected operational durations and repair efforts. Nevertheless, MTTR can be misleading since actual system downtime often depends on detection time and response delays, which these measures do not account for. Additionally, such metrics do not differentiate between failure severities or modes, potentially oversimplifying complex reliability landscapes [20]. Human-System Interaction (HSI) analysis examines how operators engage with autonomous technologies, identifying potential mismatches that could cause failures. This method is vital for ensuring seamless integration of humans and machines, minimizing risk arising from interface design or unexpected operator responses. However, evaluating HSI rigorously demands extensive empirical data and user testing, which may not always be feasible during early design phases. Furthermore, the lack of standardized metrics makes consistent assessment difficult, especially in novel MASS applications.
Sensitivity Analysis serves as a valuable tool for understanding which variables most significantly influence system performance or risk. By systematically varying input parameters, analysts can identify critical factors that warrant focus attention or control. While this aids prioritization, sensitivity analysis may oversimplify relationships in systems where variables interact nonlinearly or dynamically. Its effectiveness also hinges on the accuracy and completeness of input data, which can be limited for emerging technologies like MASS. System Theoretic Process Analysis (STPA) offers a holistic approach by incorporating both safety and security concerns within complex socio-technical systems. It identifies unsafe control actions and traces their potential consequences through system losses and hazards. This comprehensive view suits MASS well, given their complex interactions between hardware, software, and human operators. However, STPA typically yields qualitative insights rather than quantifiable risk measures. It relies heavily on expert knowledge and can be resource-intensive to apply thoroughly [21].
Extended Fuzzy Fault Tree Analysis (EFFTA) enhances traditional fault tree analysis by integrating fuzzy logic to handle uncertainty and imprecise data. This is particularly helpful during early development stages of MASS, where empirical failure data is sparse. By allowing linguistic variables and subjective assessments, EFFTA can rank failure modes under uncertainty. The downside is that defining appropriate fuzzy sets and rules requires expertise, and the results can be sensitive to subjective inputs. Interpretation of fuzzy outputs may also be less straightforward than crisp probabilities [10].
The Multinomial Process Tree (MPT) method is useful for modeling sequences of probabilistic events and allocating resources to reduce risks effectively. It helps predict how disruptions propagate and can guide preventive measures. However, MPT is less suited for systems with complex two-way or simultaneous interactions, which limits its applicability for highly interconnected MASS scenarios. The computational effort also grows with system complexity [16]. Finally, Fault Tree Analysis (FTA) remains a fundamental technique due to its structured approach in identifying failure paths and critical system components. It is widely understood and can provide both qualitative and quantitative insights. However, FTA traditionally assumes static system structures and may not capture dynamic or time-dependent behaviors effectively. Furthermore, while it can incorporate human-related failures, it may not fully account for the nuanced interactions between human operators and autonomous systems that are characteristic of MASS operations.
These methodologies present a spectrum of tools that complement each other, each addressing different aspects of reliability and risk assessment. Bayesian Networks and Fault Tree Analysis offer strong quantitative frameworks but face scalability and dynamic modeling challenges. Human Factors and Human-System Interaction approaches emphasize the crucial human element but are often qualitative and context-specific. Emerging hybrid methods like STPA and Extended Fuzzy Fault Trees offer promising ways to integrate complexity and uncertainty but require specialized expertise and resources. Effective reliability assessment of marine propulsion systems in MASS likely requires combining multiple approaches to capture technical, human, and systemic factors comprehensively.
4. Practical Applicability of Identified Reliability Assessment Methodologies for MASS Propulsion Systems
Reliability assessment techniques such as FTA, FMEA, and Bayesian Networks (BNs) are highly applicable to MASS due to the complex integration of mechanical, electrical, and software systems.
FTA enables the identification of critical combinations of failures that could lead to propulsion system malfunctions, supporting compliance with safety standards and regulatory requirements for autonomous vessels. By clearly visualizing failure pathways, FTA allows designers to implement redundancy, select more robust components, and incorporate fail-safe mechanisms in high-risk areas. It also helps prioritize subsystems that most significantly affect overall reliability, facilitating targeted preventive maintenance and enhancing operational safety.
FMEA allows for the early detection of potential failure modes in propulsion systems, ensuring that critical components are robust and reliable before deployment. By assigning Risk Priority Numbers (RPNs) to each failure mode, operators can focus on the most severe or likely failures. This approach enables maintenance teams to develop targeted inspection schedules and implement predictive maintenance strategies, concentrating resources on the components that have the greatest impact on system reliability and vessel safety.
BNs provide a dynamic and probabilistic framework for assessing propulsion system reliability. They allow real-time evaluation of failure probabilities by integrating sensor data, system diagnostics, and environmental conditions. BNs also support predictive decision-making for autonomous operations, enabling on-board algorithms to adjust speed, activate redundancy, or take preventive actions in high-risk scenarios. Their ability to incorporate incomplete or uncertain information from multiple sources makes them particularly well-suited for complex, real-world maritime environments.
The application of these reliability assessment methodologies enhances safety, reduces the likelihood of accidents, and supports cost-effective maintenance by prioritizing high-risk components. They also facilitate regulatory compliance through comprehensive documentation and justification for autonomous system certification. Collectively, these approaches improve the operational resilience of MASS, enabling vessels to maintain functionality even under uncertain or adverse conditions.
5. Conclusions
This study presents a comprehensive reliability assessment of marine propulsion systems in MASS using bibliometric analysis. Research articles were collected from the Web of Science (WoS) and Scopus databases. The study investigates the countries involved, key publication sources, influential papers and authors, research tools employed, and the frequency of important keywords. Although the earliest publication in this field dates back to 1974, the topic remained relatively underexplored until recent years. A significant increase in research activity has occurred between 2017 and 2021. Prior to 2007, only a small number of relevant papers had been published. Norway emerged as the leading contributor to this field, followed by the United States. Bibliographic coupling at the organizational level indicates that the Department of Marine Technology in Norway has had the most significant influence on this research area. Among the sources, Safety Science is the most frequently cited and influential journal, followed by Ocean Engineering, Safety and Reliability: Safe Societies, and Applied Sciences. In terms of bibliographic coupling of documents, paper [9] is identified as the most influential, followed by paper [18]. Regarding authorship, author [22] stands out as the most influential, having published 11 papers, while author [23] follows with 5 publications. The co-occurrence analysis of author keywords highlights that autonomous ships, reliability, marine vehicle, safety, reliability engineering, and Bayesian network are among the most commonly used and significant terms in this research domain. In terms of methodological tools, BNs, FTA, and FMEA are the most frequently applied. Among these, Bayesian networks are the most widely used due to their strong capability in handling uncertainty and complex system interactions. Future studies could expand this scope by incorporating advanced approaches such as Prognostics and Health Management (PHM), Condition-Based Maintenance (CBM), and Digital Twin technologies, alongside emerging techniques including machine learning, data-driven analytics, and hybrid physical data-driven modeling frameworks. Additionally, incorporating industry perspectives or case studies would further enhance the practical relevance of the findings.
Author Contributions
Conceptualization, R.I.; methodology, R.I.; validation, Y.G.; formal analysis, Y.G.; writing—original draft, Y.G.; writing—review and editing, R.I.; writing—review and editing, S.A.; review and editing, N.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
Table A1.
Number of articles selected for this study.
Table A1.
Number of articles selected for this study.
| Number | Title | Reference |
|---|---|---|
| 1 | An RCM approach for assessing reliability challenges and maintenance needs of unmanned cargo ships | [3] |
| 2 | A multinomial process tree for reliability assessment of machinery in autonomous ships | [4] |
| 3 | Comments to Wróbel and Montewka on collision avoidance of autonomous ships and human failure events | [23] |
| 4 | Research on Unmanned Ship Control System Based on Fuzzy PID | [24] |
| 5 | Risks and benefits of crew reduction and/or removal with increased automation on the ship operator: A licensed deck officer’s perspective | [15] |
| 6 | Identification of the relationship between maritime autonomous surface ships and the operator’s mental workload | [25] |
| 7 | Development of Autonomous Recovery System for Pipeline of Naval Ships by Using a Multi-Stage Control Algorithm | [26] |
| 8 | Online Fault Detection in Autonomous Ferries: Using Fault-Type Independent Spectral Anomaly Detection | [27] |
| 9 | Operator focused automation of ROV operations | [28] |
| 10 | A method and application platform of testing technology for unmanned ship | [29] |
| 11 | A generic approach to analysing failures in human—System interaction in autonomy | [30] |
| 12 | A Delphi-AHP study on STCW leadership competence in the age of autonomous maritime operations | [31] |
| 13 | Ship main engine lubricating oil system’s reliability analysis by using Bayesian network approach | [5] |
| 14 | Risk Management of Autonomous Marine Systems and Operations | [22] |
| 15 | The ocean-going autonomous ship—Challenges and threats | [32] |
| 16 | Enabling Technologies for Maritime Autonomous Surface Ships | [33] |
| 17 | Collision avoidance on maritime autonomous surface ships: Operators’ tasks and human failure events | [9] |
| 18 | Hybrid Approach to Estimate a Collision-Free Velocity for Autonomous Surface Vehicles | [34] |
| 19 | Reliable and cost-effective communication at high seas, for a safe operation of autonomous ship | [35] |
| 20 | Hydrodynamic design of a morphic autonomous underwater vehicle using neural networks | [36] |
| 21 | High reliability management and control operator risks in autonomous marine systems and operations | [14] |
| 22 | Application of reliability, availability and maintenance principles and tools for ship design | [20] |
| 23 | Toward an Autonomous Communications Relay for Deep-Water Scientific AUV Operations | [37] |
| 24 | Assessing ship risk model applicability to Marine Autonomous Surface Ships | [18] |
| 25 | Intact stability and seakeeping characteristics of autonomous surface vehicle (asv) using swath hullform to support bathymetry survey activities on the coastal area | [38] |
| 26 | Toward a reliable main engine lubricating oil system for a safe operation of autonomous ship | [6] |
| 27 | Task human reliability analysis for a safe operation of autonomous ship | [7] |
| 28 | On factors affecting autonomous ship operators’ performance in a Shore Control Center | [12] |
| 29 | Accounting for human failure in autonomous ship operations | [11] |
| 30 | Risk from cyberattacks on autonomous ships | [39] |
| 31 | At least as safe as manned shipping? Autonomous shipping, at least as safe as manned shipping? autonomous shipping, safety and “human error” | [40] |
| 32 | A risk model for autonomous marine systems and operation focusing on human-autonomy collaboration | [13] |
| 33 | Integrated 5G satellite-terrestrial systems: Use cases for road safety and autonomous ships | [41] |
| 34 | Toward reliable maritime communication for a safe operation of autonomous ship | [7] |
| 35 | Fail silent and robust power management architectures to enable autonomous driving embedded systems | [42] |
| 36 | Locata network design and reliability analysis for Harbour positioning | [43] |
| 37 | Neural anti-collision system for Autonomous Surface Vehicle | [44] |
| 38 | Reliability assessment of an autonomous underwater vehicle propulsion by using electrical multi-phase drive | [45] |
| 39 | Autonomous mobile inspection system for detecting hidden voids in LNG carrier triplex bonding layers | [46] |
| 40 | An autonomous structural health monitoring solution | [47] |
| 41 | Design of an autonomous surface vehicle used for monitoring the marine environment | [48] |
| 42 | Research on computer vision-based for UAV autonomous landing on a ship | [49] |
| 43 | Predicting risk in missions under sea ice with autonomous underwater vehicles | [50] |
| 44 | Autonomous straightening and traversing of shipboard helicopters | [51] |
| 45 | From autonomous underwater vehicles (AUV’s) to supervised underwater vehicles (SUV’s) | [52] |
| 46 | A study on advanced man-machine interface system for autonomous nuclear power plants | [53] |
| 47 | Reconfigurable control of an autonomous underwater vehicle | [54] |
| 48 | Towards supervisory risk control of autonomous ships | [17] |
| 49 | Information Exchange System for Efficient Operations of Autonomous Ship | [55] |
| 50 | On the use of leading safety indicators in maritime and their feasibility for Maritime Autonomous Surface Ships | [56] |
| 51 | The Impact of Autonomous Ships on Safety at Sea—A Statistical Analysis | [57] |
| 52 | Communication architecture for autonomous passenger ship | [58] |
| 53 | Human-system concurrent task analysis for maritime autonomous surface ship operation and safety | [23] |
| 54 | A probabilistic model of human error assessment for autonomous cargo ships focusing on human-autonomy collaboration | [19] |
| 55 | Risk assessment of the operations of maritime autonomous surface ships | [58] |
| 56 | A novel risk assessment process: Application to an autonomous inland waterways ship | [59] |
| 57 | Assessing autonomous ship navigation using bridge simulators enhanced by cycle-consistent adversarial networks | [60] |
| 58 | Ontology-Based Fault Tree Analysis Algorithms in a Fuzzy Environment for Autonomous Ships | [61] |
| 59 | A Comprehensive Survey of Prognostics and Health Management Based on Deep Learning for Autonomous Ships | [62] |
| 60 | Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels | [63] |
| 61 | Intent inference of ship maneuvering for automatic ship collision avoidance | [64] |
| 62 | Risk assessment of collisions of an autonomous passenger ferry | [65] |
| 63 | A concept of critical safety area applicable for an obstacle-avoidance process for manned and autonomous ships | [66] |
| 64 | CFD Simulation of the Safety of Unmanned Ship Berthing under the Influence of Various Factors | [67] |
| 65 | AIS-based multiple vessel collision and grounding risk identification based on adaptive safety domain | [68] |
| 66 | A systemic hazard analysis and management process for the concept design phase of an autonomous vessel | [69] |
| 67 | Risk-based regulation and certification of autonomous transport systems | [70] |
| 68 | A Formation Autonomous Navigation System for Unmanned Surface Vehicles with Distributed Control Strategy | [71] |
| 69 | Adaptive steering control for an azimuth thrusters-based autonomous vessel | [72] |
| 70 | Towards the assessment of the potential impact of unmanned vessels on maritime transportation safety | [73] |
| 71 | Risk-aware Path Planning for Autonomous Underwater Vehicles using Predictive Ocean Models | [74] |
| 72 | Orientation-Aware Ship Detection via a Rotation Feature Decoupling Supported Deep Learning Approach | [75] |
| 73 | Review of Condition Monitoring and Fault Diagnosis for Marine Power Systems | [76] |
References
- Islam, R.; Yu, H.; Abbassi, R.; Garaniya, V.; Khan, F. Development of a Monograph for Human Error Likelihood Assessment in Marine Operations. Saf. Sci. 2017, 91, 33–39. [Google Scholar] [CrossRef]
- Allal, A.A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Toward a Reliable Sea Water Central Cooling System for a Safe Operation of Autonomous Ship. In Proceedings of the International Conference on Recent Innovation in Engineering and Technology, Madeira Island, Portugal, 27–29 June 2017. [Google Scholar]
- Eriksen, S.; Utne, I.B.; Lützen, M. An RCM Approach for Assessing Reliability Challenges and Maintenance Needs of Unmanned Cargo Ships. Reliab. Eng. Syst. Saf. 2021, 210, 107550. [Google Scholar] [CrossRef]
- Abaei, M.M.; Hekkenberg, R.; BahooToroody, A. A Multinomial Process Tree for Reliability Assessment of Machinery in Autonomous Ships. Reliab. Eng. Syst. Saf. 2021, 210, 107484. [Google Scholar] [CrossRef]
- Ait Allal, A.; Melhaoui, Y.; Kamil, A.; Mansouri, K.; Youssfi, M. Ship Main Engine Lubricating Oil System’s Reliability Analysis by Using Bayesian Network Approach. Int. J. Eng. Res. Afr. 2020, 47, 160–168. [Google Scholar] [CrossRef]
- Allal, A.A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Toward a Reliable Main Engine Lubricating Oil System for a Safe Operation of Autonomous Ship. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; pp. 391–399. [Google Scholar]
- Allal, A.A.; Mansouri, K.; Qbadou, M.; Youssfi, M. Task Human Reliability Analysis for a Safe Operation of Autonomous Ship. In Proceedings of the 2017 2nd International Conference on System Reliability and Safety (ICSRS), Milan, Italy, 20–22 December 2017; pp. 74–81. [Google Scholar]
- Amin, M.T.; Khan, F.; Amyotte, P. A Bibliometric Review of Process Safety and Risk Analysis. Process Saf. Environ. Prot. 2019, 126, 366–381. [Google Scholar] [CrossRef]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. Collision Avoidance on Maritime Autonomous Surface Ships: Operators’ Tasks and Human Failure Events. Saf. Sci. 2019, 116, 33–44. [Google Scholar] [CrossRef]
- Ramos, M.A.; Thieme, C.A.; Utne, I.B.; Mosleh, A. A Generic Approach to Analysing Failures in Human–System Interaction in Autonomy. Saf. Sci. 2020, 129, 104808. [Google Scholar] [CrossRef]
- Ramos, M.A.; Utne, I.B.; Vinnem, J.E.; Mosleh, A. Accounting for Human Failure in Autonomous Ship Operations. In Safety and Reliability—Safe Societies in a Changing World; Haugen, S., Barros, A., van Gulijk, C., Kongsvik, T., Vinnem, J.E., Eds.; CRC Press: London, UK, 2018; pp. 355–363. [Google Scholar]
- Ramos, M.A.; Utne, I.; Mosleh, A. On Factors Affecting Autonomous Ships Operators Performance in a Shore Control Center. In Proceedings of the 14th Probabilistic Safety Assessment and Management (PSAM 14), Los Angeles, CA, USA, 16–21 September 2018. [Google Scholar]
- Thieme, C.A.; Utne, I.B. A Risk Model for Autonomous Marine Systems and Operation Focusing on Human–Autonomy Collaboration. Proc. Inst. Mech. Eng. O J. Risk Reliab. 2017, 231, 446–464. [Google Scholar] [CrossRef]
- Utne, I.B.; Schjølberg, I.; Roe, E. High Reliability Management and Control Operator Risks in Autonomous Marine Systems and Operations. Ocean Eng. 2019, 171, 399–416. [Google Scholar] [CrossRef]
- Hannaford, E.; Hassel, E.V. Risks and Benefits of Crew Reduction and/or Removal with Increased Automation on the Ship Operator: A Licensed Deck Officer’s Perspective. Appl. Sci. 2021, 11, 3569. [Google Scholar] [CrossRef]
- Abaei, M.; Bahootoroody, A.; Arzaghi, E. Predicting Future of Unattended Machinery Plants: A Step Toward Reliable Autonomous Shipping. In Proceedings of the International Ship Control Systems Symposium (iSCSS), Online, 6–8 October 2020. [Google Scholar] [CrossRef]
- Utne, I.B.; Rokseth, B.; Sørensen, A.J.; Vinnem, J.E. Towards Supervisory Risk Control of Autonomous Ships. Reliab. Eng. Syst. Saf. 2020, 196, 106757. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing Ship Risk Model Applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A Probabilistic Model of Human Error Assessment for Autonomous Cargo Ships Focusing on Human–Autonomy Collaboration. Saf. Sci. 2020, 130, 104838. [Google Scholar] [CrossRef]
- Le Diagon, V.; Li, N.; Klein, L.; Corrignan, P. Application of Reliability, Availability and Maintenance Principles and Tools for Ship Design. In A Holistic Approach to Ship Design; Papanikolaou, A., Ed.; Springer: Cham, Switzerland, 2019; pp. 357–381. [Google Scholar]
- Johansen, T.; Utne, I.B. Risk Analysis of Autonomous Ships. In Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference (ESREL2020 PSAM15), Venice, Italy, 14–18 September 2020; pp. 131–138. [Google Scholar]
- Utne, I.B.; Sørensen, A.J.; Schjølberg, I. Risk Management of Autonomous Marine Systems and Operations. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017; Volume 58094, p. V008T10A016. [Google Scholar] [CrossRef]
- Ramos, M.A.; Utne, I.B.; Mosleh, A. Comments to Wróbel and Montewka on Collision Avoidance of Autonomous Ships and Human Failure Events. Saf. Sci. 2020, 121, 632–633. [Google Scholar] [CrossRef]
- Huo, H. Research on Unmanned Ship Control System Based on Fuzzy PID. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1852, pp. 1–8. [Google Scholar] [CrossRef]
- Yoshida, M.; Shimizu, E.; Sugomori, M.; Umeda, A. Identification of the Relationship between Maritime Autonomous Surface Ships and the Operator’s Mental Workload. Appl. Sci. 2021, 11, 2331. [Google Scholar] [CrossRef]
- Jung, B.C.; Moon, S.-J.; Lee, S.H.; Lee, H.; Park, J.-W.; Shin, Y.-H. Development of Autonomous Recovery System for Pipeline of Naval Ships by Using a Multistage Control Algorithm. IEEE/ASME Trans. Mechatron. 2021, 27, 1150–1161. [Google Scholar] [CrossRef]
- Ellefsen, A.L.; Han, P.; Cheng, X.; Holmeset, F.T.; Æsøy, V.; Zhang, H. Online Fault Detection in Autonomous Ferries: Using Fault-Type Independent Spectral Anomaly Detection. IEEE Trans. Instrum. Meas. 2020, 69, 8216–8225. [Google Scholar] [CrossRef]
- Teigland, H.; Hassani, V.; Møller, M.T. Operator Focused Automation of ROV Operations. In Proceedings of the 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St. John’s, NL, Canada, 30 September–1 October 2020; pp. 1–6. [Google Scholar]
- Yunsheng, F.; Hui, S.; Guofeng, W. A Method and Application Platform of Testing Technology for Unmanned Ship. In Proceedings of the 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE), Dalian, China, 23–25 October 2020; pp. 151–155. [Google Scholar] [CrossRef]
- Ramos, M.A.; Thieme, C.A.; Utne, I.B.; Mosleh, A. Human-System Concurrent Task Analysis for Maritime Autonomous Surface Ship Operation and Safety. Reliab. Eng. Syst. Saf. 2020, 195, 106697. [Google Scholar] [CrossRef]
- Kim, T.-e.; Mallam, S. A Delphi-AHP Study on STCW Leadership Competence in the Age of Autonomous Maritime Operations. WMU J. Marit. Aff. 2020, 19, 163–181. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship—Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Heffner, K.; Rødseth, Ø.J. Enabling Technologies for Maritime Autonomous Surface Ships. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1357, p. 012015. [Google Scholar] [CrossRef]
- Silva, R.; Leite, P.; Campos, D.; Pinto, A.M. Hybrid Approach to Estimate a Collision-Free Velocity for Autonomous Surface Vehicles. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 29–30 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Allal, A.A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Reliable and Cost-Effective Communication at High Seas, for a Safe Operation of Autonomous Ship. In Proceedings of the 2018 6th International Conference on Wireless Networks and Mobile Communications (WINCOM), Fez, Morocco, 22–24 October 2018; pp. 1–6. [Google Scholar]
- Becker, Q.; Alam, M.-R.; Immas, A. Hydrodynamic Design of a Morphic Autonomous Underwater Vehicle Using Neural Networks. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Glasgow, UK, 10–15 June 2019; Volume 5A. [Google Scholar]
- Jakuba, M.V.; Kaiser, C.L.; German, C.R.; Soule, A.S.; Kelley, S.R. Toward an Autonomous Communications Relay for Deep-Water Scientific AUV Operations. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Monterey, CA, USA, 17–19 September 2018; pp. 1–6. [Google Scholar]
- Fauzan, Z.A.; Triwiyatno, A.; Sasmito, B.; Nubly, M.H. Intact Stability and Seakeeping Characteristics of Autonomous Surface Vehicle (ASV) Using SWATH Hullform to Support Bathymetry Survey Activities on the Coastal Area. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 154, p. 02002. [Google Scholar] [CrossRef]
- Vinnem, J.E.; Utne, I.B. Risk from Cyberattacks on Autonomous Ships. In Safety and Reliability—Safe Societies in a Changing World; Haugen, S., Barros, A., Zio, E., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 1485–1492. [Google Scholar]
- Porathe, T.; Hoem, Å.; Rødseth, Ø.; Fjørtoft, K.; Johnsen, S.O. At Least as Safe as Manned Shipping? Autonomous Shipping, Safety and “Human Error”. In Safety and Reliability—Safe Societies in a Changing World; Haugen, S., Barros, A., Zio, E., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 417–425. [Google Scholar]
- Höyhtyä, M.; Ojanperä, T.; Mäkelä, J.; Ruponen, S.; Järvensivu, P. Integrated 5G Satellite-Terrestrial Systems: Use Cases for Road Safety and Autonomous Ships. In Proceedings of the 23rd Ka and Broadband Communications Conference, Trieste, Italy, 7–9 November 2017; pp. 1–5. [Google Scholar]
- Lopez, D.; Clairet, M. Fail Silent and Robust Power Management Architectures to Enable Autonomous Driving Embedded Systems. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Bordeaux, France, 5–7 July 2016; pp. 1–6. [Google Scholar]
- Yang, L.; Li, Y.; Jiang, W.; Rizos, C. Locata Network Design and Reliability Analysis for Harbour Positioning. J. Navig. 2015, 68, 238–252. [Google Scholar] [CrossRef]
- Praczyk, T. Neural Anti-Collision System for Autonomous Surface Vehicle. Neurocomputing 2015, 149, 559–572. [Google Scholar] [CrossRef]
- Olmi, C.; Scuiller, F.; Charpentier, J.-F. Reliability Assessment of an Autonomous Underwater Vehicle Propulsion by Using Electrical Multi-Phase Drive. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 3698–3703. [Google Scholar] [CrossRef]
- Lee, S.; Lim, H.; Sohn, H.; Yun, W.; Song, E. Autonomous Mobile Inspection System for Detecting Hidden Voids in LNG Carrier Triplex Bonding Layers. In Proceedings of the Structural Health Monitoring 2015—System Reliability for Verification and Implementation, Stanford, CA, USA, 1–3 September 2015; pp. 276–290. [Google Scholar]
- Featherston, C.A.; Holford, K.M.; Pullin, R.; Lees, J.; Eaton, M.; Pearson, M. An Autonomous Structural Health Monitoring Solution. In Proceedings of the Smart Sensors, Actuators, and MEMS VI, Grenoble, France, 6–8 May 2013; Volume 8763, p. 876302. [Google Scholar]
- Wang, J.; Gu, W.; Zhu, J. Design of an Autonomous Surface Vehicle Used for Marine Environment Monitoring. In Proceedings of the 2009 International Conference on Advanced Computer Control, Singapore, 22–24 January 2009; pp. 742–746. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, Y.; Ji, S.; Cheng, Y.; Tian, Y. Research on Computer Vision-Based for UAV Autonomous Landing on a Ship. Pattern Recognit. Lett. 2009, 30, 600–605. [Google Scholar] [CrossRef]
- Griffiths, G.; Brito, M. Predicting Risk in Missions under Sea Ice with Autonomous Underwater Vehicles. In Proceedings of the 2008 IEEE/OES Autonomous Underwater Vehicles (AUV), Woods Hole, MA, USA, 1–3 October 2008; pp. 1–7. [Google Scholar] [CrossRef]
- Feldman, A.R.; Langlois, R.G. Autonomous Straightening and Traversing of Shipboard Helicopters. J. Field Robot. 2006, 23, 123–139. [Google Scholar] [CrossRef]
- Thomas, H.; Petit, E. From Autonomous Underwater Vehicles (AUVs) to Supervised Underwater Vehicles (SUVs). In Proceedings of the OCEANS ‘97. MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; Volume 2, pp. 991–996. [Google Scholar]
- Matsuoka, T.; Numano, M.; Someya, M.; Fukuto, J.; Mitomo, N.; Miyazaki, K.; Sugasawa, S. A Study on Advanced Man-Machine Interface System for Autonomous Nuclear Power Plants. Senpaku Gijutsu Kenkyusho Hokoku (Rep. Ship Res. Inst.) 1997, 33, 1–15. [Google Scholar]
- Tacconi, G.; Tiano, A. Reconfigurable Control of an Autonomous Underwater Vehicle. In Proceedings of the 6th International Symposium on Unmanned Untethered Submersible Technology, Durham, NH, USA, 25–27 September 1989; pp. 1–10. [Google Scholar]
- Namgung, H.; Jeong, J.S.; Kim, J.-S.; Choi, J.-C.; Kim, G.-U. Information Exchange System for Efficient Operations of Autonomous Ship. In Proceedings of the 2018 International Conference on Fuzzy Theory and Its Applications (iFUZZY), Hsinchu, Taiwan, 16–18 November 2018; pp. 140–143. [Google Scholar]
- Wróbel, K.; Gil, M.; Krata, P.; Olszewski, K.; Montewka, J. On the Use of Leading Safety Indicators in Maritime and Their Feasibility for Maritime Autonomous Surface Ships. Proc. Inst. Mech. Eng. O J. Risk Reliab. 2021, 235, 1066–1082. [Google Scholar] [CrossRef]
- de Vos, J.; Hekkenberg, R.G.; Banda, O.A.V. The Impact of Autonomous Ships on Safety at Sea–A Statistical Analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk Assessment of the Operations of Maritime Autonomous Surface Ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Bolbot, V.; Theotokatos, G.; Wennersberg, L.A.; Faivre, J.; Vassalos, D.; Boulougouris, E.; Van Coillie, A. A Novel Risk Assessment Process: Application to an Autonomous Inland Waterways Ship. Proc. Inst. Mech. Eng. O J. Risk Reliab. 2021, 235, 1073–1092. [Google Scholar] [CrossRef]
- Brandsæter, A.; Osen, O.L. Assessing Autonomous Ship Navigation Using Bridge Simulators Enhanced by Cycle-Consistent Adversarial Networks. Proc. Inst. Mech. Eng. O J. Risk Reliab. 2021, 235, 1056–1072. [Google Scholar] [CrossRef]
- Sahin, B.; Yazidi, A.; Roman, D.; Soylu, A. Ontology-Based Fault Tree Analysis Algorithms in a Fuzzy Environment for Autonomous Ships. IEEE Access 2021, 9, 40915–40932. [Google Scholar] [CrossRef]
- Ellefsen, A.L.; Æsøy, V.; Ushakov, S.; Zhang, H. A Comprehensive Survey of Prognostics and Health Management Based on Deep Learning for Autonomous Ships. IEEE Trans. Reliab. 2019, 68, 720–740. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the Development of a System-Theoretic Model for Safety Assessment of Autonomous Merchant Vessels. Reliab. Eng. Syst. Saf. 2018, 178, 209–224. [Google Scholar] [CrossRef]
- Cho, Y.; Han, J.; Kim, J. Intent Inference of Ship Maneuvering for Automatic Ship Collision Avoidance. IFAC-Pap. 2018, 51, 384–388. [Google Scholar] [CrossRef]
- Guo, C.; Haugen, S.; Utne, I.B. Risk Assessment of Collisions of an Autonomous Passenger Ferry. Proc. Inst. Mech. Eng. O J. Risk Reliab. 2021, 235, 1083–1098. [Google Scholar] [CrossRef]
- Gil, M. A Concept of Critical Safety Area Applicable for an Obstacle-Avoidance Process for Manned and Autonomous Ships. Reliab. Eng. Syst. Saf. 2021, 214, 107806. [Google Scholar] [CrossRef]
- Xiao, G.; Tong, C.; Wang, Y.; Guan, S.; Hong, X.; Shang, B. CFD Simulation of the Safety of Unmanned Ship Berthing under the Influence of Various Factors. Appl. Sci. 2021, 11, 7102. [Google Scholar] [CrossRef]
- Bakdi, A.; Glad, I.K.; Vanem, E.; Engelhardtsen, Ø. AIS-Based Multiple Vessel Collision and Grounding Risk Identification Based on Adaptive Safety Domain. J. Mar. Sci. Eng. 2020, 8, 5. [Google Scholar] [CrossRef]
- Banda, O.A.V.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.; Bergström, M.; Kujala, P. A Systemic Hazard Analysis and Management Process for the Concept Design Phase of an Autonomous Vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Johnsen, S.O.; Hoem, Å.; Stålhane, T.; Jenssen, G.; Moen, T. Risk-Based Regulation and Certification of Autonomous Transport Systems. In Safety and Reliability—Safe Societies in a Changing World; Haugen, S., Barros, A., Zio, E., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 1791–1799. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Autonomous Navigation System for Unmanned Surface Vehicles with Distributed Control Strategy. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2834–2845. [Google Scholar] [CrossRef]
- Bibuli, M.; Odetti, A.; Zereik, E. Adaptive Steering Control for an Azimuth Thrusters-Based Autonomous Vessel. J. Mar. Eng. Technol. 2020, 19 (Suppl. S1), 76–91. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the Assessment of Potential Impact of Unmanned Vessels on Maritime Transportation Safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Pereira, A.A.; Binney, J.; Hollinger, G.A.; Sukhatme, G.S. Risk-Aware Path Planning for Autonomous Underwater Vehicles Using Predictive Ocean Models. J. Field Robot. 2013, 30, 741–762. [Google Scholar] [CrossRef]
- Chen, X.; Wu, H.; Han, B.; Liu, W.; Montewka, J.; Liu, R.W. Orientation-Aware Ship Detection via a Rotation Feature Decoupling Supported Deep Learning Approach. Eng. Appl. Artif. Intell. 2023, 125, 106686. [Google Scholar] [CrossRef]
- Xu, X.; Yan, X.; Yang, K.; Zhao, J.; Sheng, C.; Yuan, C. Review of Condition Monitoring and Fault Diagnosis for Marine Power Systems. Transp. Saf. Environ. 2021, 3, 85–102. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).