Research on Collision Avoidance Methods for Unmanned Surface Vehicles Based on Boundary Potential Field


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
2.1. Theoretical Background
2.1.1. Artificial Potential Field (APF) Method
2.1.2. Ship Collision Risk
- The 1972 International Regulations for Preventing Collisions at Sea (COLREGs)
- Overtaking: A vessel shall be deemed to be overtaking when coming up with another vessel from a direction more than 22.5 degrees abaft her beam. Any vessel overtaking any other shall must keep out of the way of the vessel being overtaken, as shown in Figure 2a;
- Head-on Situation: When two power-driven vessels are meeting on reciprocal or nearly reciprocal courses so as to involve risk of collision each shall alter her course to starboard so that each shall pass on the port side of the other, as shown in Figure 2b;
- Crossing Situation: When two power-driven vessels are crossing so as to involve risk of collision, the vessel which has the other on her own starboard side shall keep out of the way and shall, if the circumstances of the case admit, avoid crossing ahead of the other vessel, as shown in Figure 2c,d.
- 2.
- Distance of Closest Point of Approach (DCPA) and Time of Closest Point of Approach (TCPA)
- 3.
- Space Collision Risk (SCR) and Time Collision Risk (TCR)
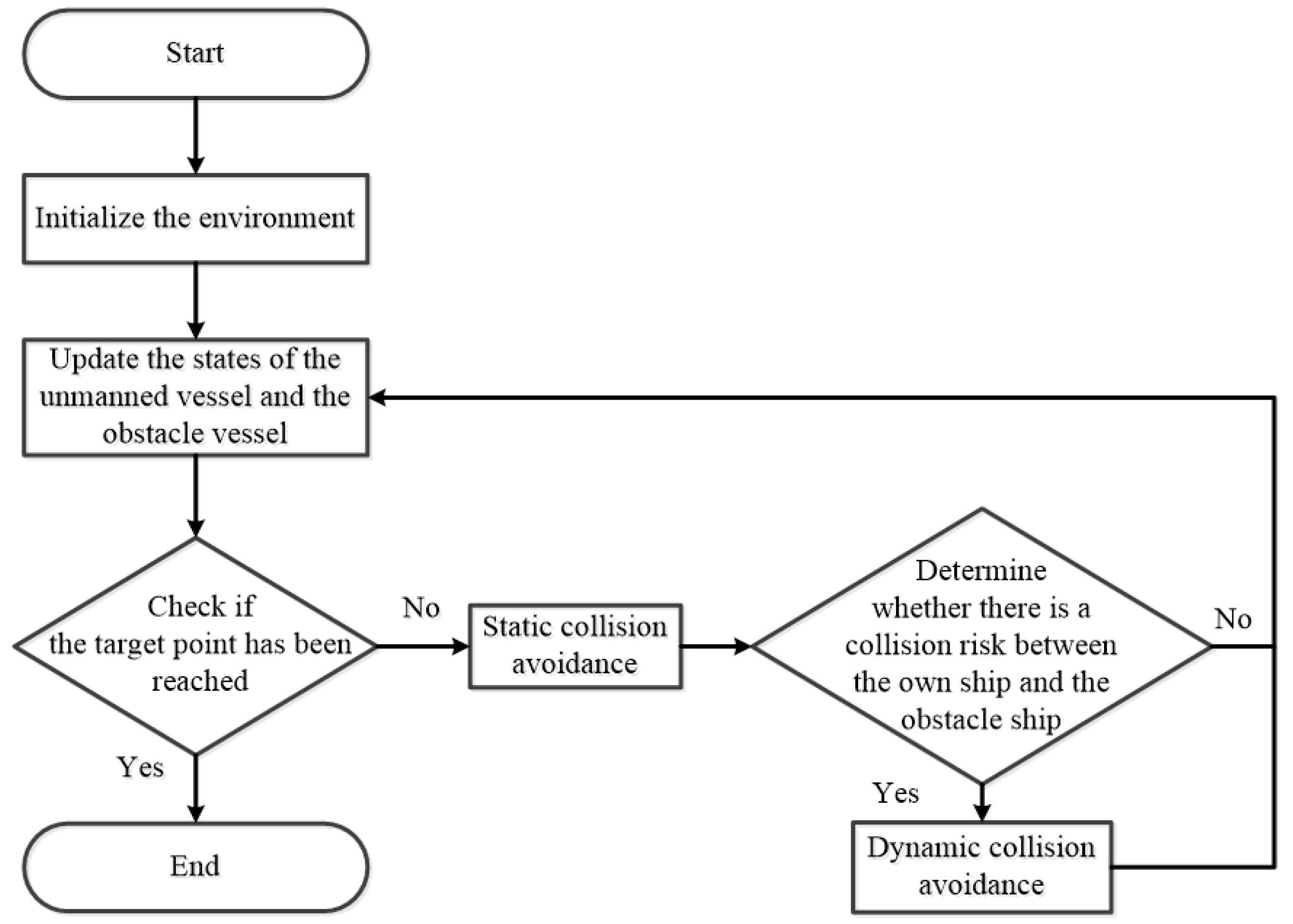
2.2. Path Planning Implementation
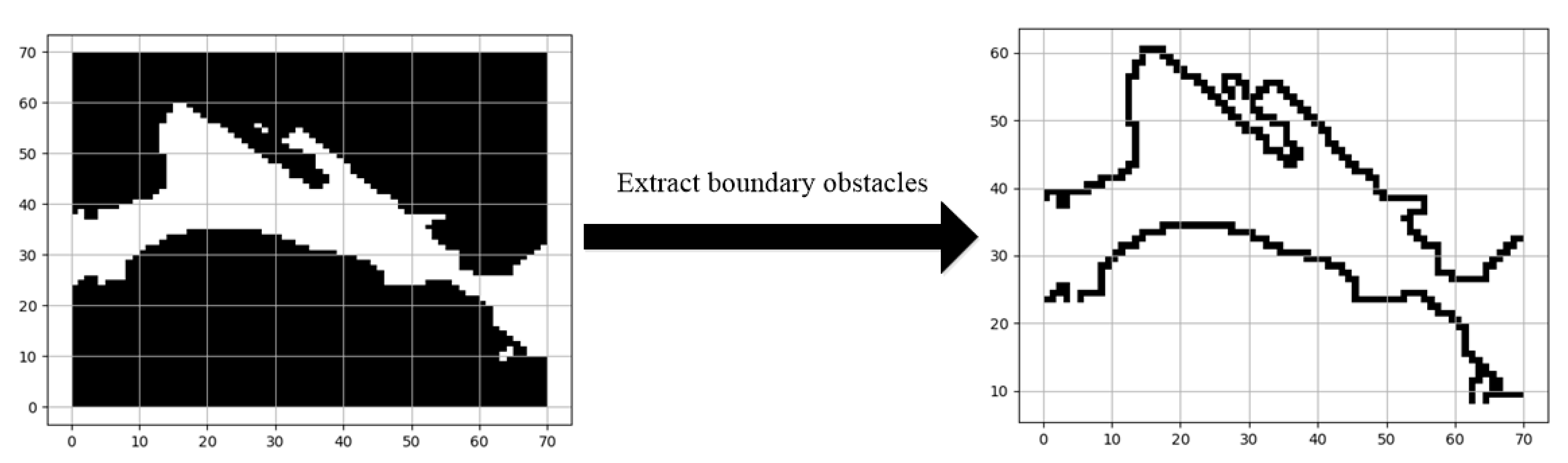
2.2.1. Discrete Boundary Potential Field Design
2.2.2. COLREGs-Based Collision Design
3. Simulation Results
3.1. Simulation Setup
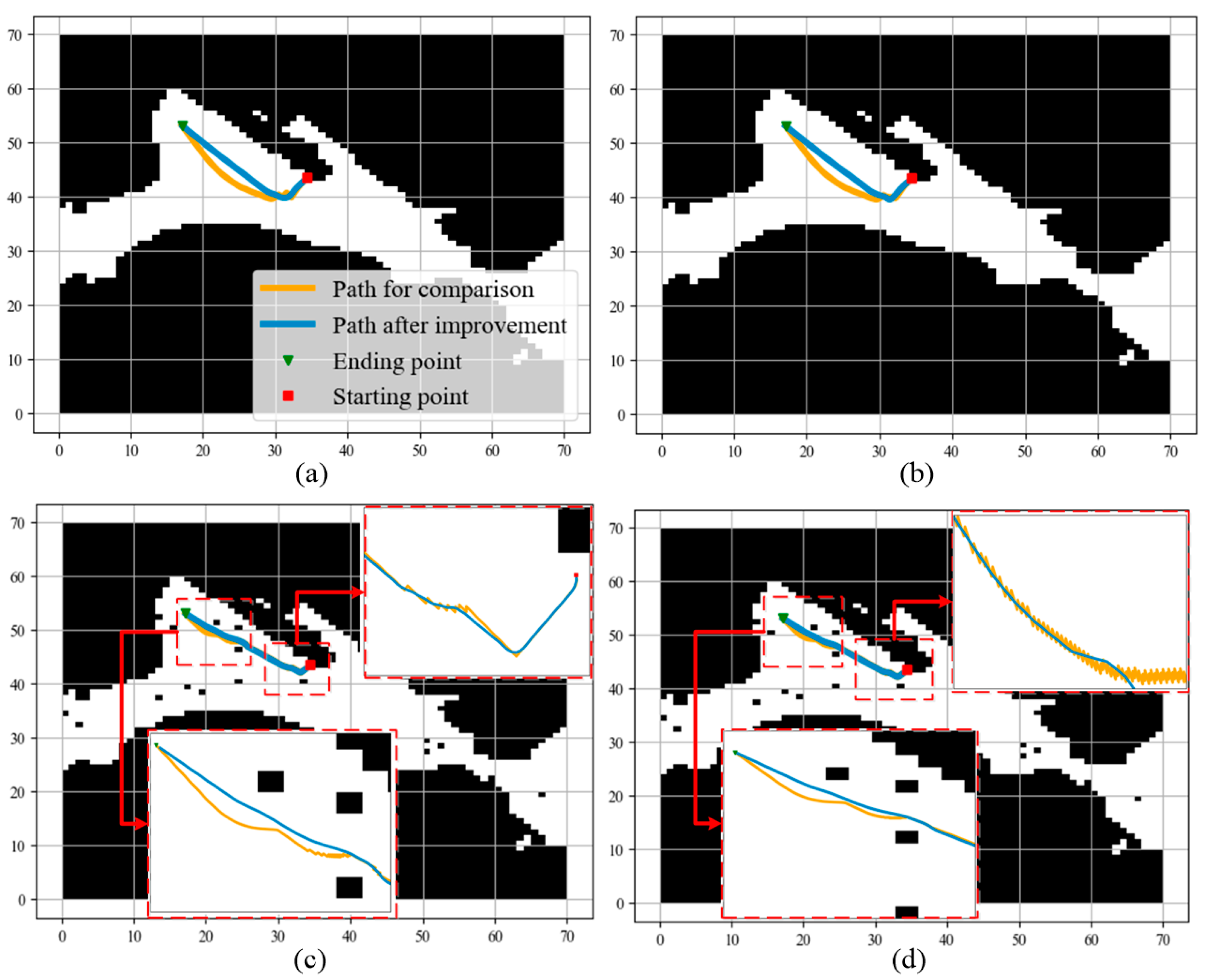
3.2. Static Environment Collision Avoidance
3.3. Dynamic Environment Collision Avoidance
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yunzhou Technology. Available online: www.yunzhou-tech.com/info/13900.html (accessed on 4 December 2024).
- Saildrone. Available online: www.saildrone.com/news/fleet-goes-on-mission-amid-already-busy-hurricane-season (accessed on 4 December 2024).
- Sedeño-Noda, A.; Colebrook, M. A biobjective Dijkstra algorithm. Eur. J. Oper. Res. 2019, 276, 106–118. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. In Edsger Wybe Dijkstra: His Life, Work, and Legacy; Dijkstra, E.W., Ed.; Association for Computing Machinery: New York, NY, USA, 2022; pp. 287–290. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Sun, Y.; Fang, M.; Su, Y. AGV path planning based on improved Dijkstra algorithm. In Proceedings of the 3rd International Conference on Modeling, Simulation and Optimization Technologies and Applications (MSOTA), Beijing, China, 22–23 November 2020. [Google Scholar]
- Han, Z.; Wu, D.; Zhang, J.; Huang, T.; Han, Q.L.; Zhang, M. COLREGs-adaptive trajectory planning and decision-making in maritime autonomous surface ships. Ocean Eng. 2024, 312, 119308. [Google Scholar] [CrossRef]
- Xu, D.; Yang, J.; Zhou, X.; Xu, H. Hybrid path planning method for USV using bidirectional A and improved DWA considering the manoeuvrability and COLREGs. Ocean Eng. 2024, 298, 117210. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Optimal kinodynamic motion planning using incremental sampling-based methods. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010. [Google Scholar]
- Zhang, J.; Zhang, H.; Liu, J.; Wu, D.; Soares, C.G. A two-stage path planning algorithm based on rapid-exploring random tree for ships navigating in multi-obstacle water areas considering COLREGs. J. Mar. Sci. Eng. 2022, 10, 1441. [Google Scholar] [CrossRef]
- Chiang, H.T.L.; Tapia, L. COLREG-RRT: An RRT-based COLREGS-compliant motion planner for surface vehicle navigation. IEEE Robot. Autom. Lett. 2018, 3, 2024–2031. [Google Scholar] [CrossRef]
- Jadhav, A.K.; Pandi, A.R.; Somayajula, A. Collision avoidance for autonomous surface vessels using novel artificial potential fields. Ocean Eng. 2023, 288, 116011. [Google Scholar] [CrossRef]
- Liu, W.; Qiu, K.; Yang, X.; Wang, R.; Xiang, Z.; Wang, Y.; Xu, W. COLREGS-based collision avoidance algorithm for unmanned surface vehicles using modified artificial potential fields. Phys. Commun. 2023, 57, 101980. [Google Scholar] [CrossRef]
- Han, S.; Wang, L.; Wang, Y. A potential field-based trajectory planning and tracking approach for automatic berthing and COLREGs-compliant collision avoidance. Ocean Eng. 2022, 266, 112877. [Google Scholar] [CrossRef]
- Yuan, W.; Gao, P. Model predictive control-based collision avoidance for autonomous surface vehicles in congested inland waters. Math. Probl. Eng. 2022, 2022, 7584489. [Google Scholar] [CrossRef]
- Gan, L.; Yan, Z.; Zhang, L.; Liu, K.; Zheng, Y.; Zhou, C.; Shu, Y. Ship path planning based on safety potential field in inland rivers. Ocean Eng. 2022, 260, 111928. [Google Scholar] [CrossRef]
- Wang, Z.; Im, N. Enhanced artificial potential field for MASS’s path planning navigation in restricted waterways. Appl. Ocean Res. 2024, 149, 104052. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Yao, Q.; Zheng, Z.; Qi, L.; Yuan, H.; Guo, X.; Zhao, M.; Liu, Z.; Yang, T. Path planning method with improved artificial potential field—A reinforcement learning perspective. IEEE Access 2020, 8, 135513–135523. [Google Scholar] [CrossRef]
- He, Z.; Chu, X.; Liu, C.; Wu, W. A novel model predictive artificial potential field based ship motion planning method considering COLREGs for complex encounter scenarios. ISA Trans. 2023, 134, 58–73. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, N. A survey on ship collision risk evaluation. Promet-Traffic Transp. 2014, 26, 475–486. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). Convention on the International Regulations for Preventing Collisions at Sea, 1972 (COLREGs); IMO: London, UK, 1972. [Google Scholar]
- Naeem, W.; Henrique, S.C.; Hu, L. A reactive COLREGs-compliant navigation strategy for autonomous maritime navigation. IFAC-PapersOnLine 2016, 49, 207–213. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017. [Google Scholar]
- Huang, Y.; Zhao, S.; Zhao, S. Ship trajectory planning and optimization via ensemble hybrid A* and multi-target point artificial potential field model. J. Mar. Sci. Eng. 2024, 12, 1372. [Google Scholar] [CrossRef]
- Imazu, H.; Koyama, T. The determination of collision avoidance action. J. Jpn. Inst. Navig. 1984, 70, 31–37. [Google Scholar]
- Kang, L.; Lu, Z.; Meng, Q.; Gao, S.; Wang, F. Maritime simulator based determination of minimum DCPA and TCPA in head-on ship-to-ship collision avoidance in confined waters. Transp. A Transp. Sci. 2019, 15, 1124–1144. [Google Scholar] [CrossRef]
- Chen, G.; Huang, Z.; Wang, W.; Yang, S. A novel dynamically adjusted entropy algorithm for collision avoidance in autonomous ships based on deep reinforcement learning. J. Mar. Sci. Eng. 2024, 12, 1562. [Google Scholar] [CrossRef]
- Zheng, Z.Y.; Wu, Z.L. A new model of ship collision risk. J. Dalian Marit. Univ. 2002, 28, 1–5. (In Chinese) [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Hou, P.; Cheng, C.; Wang, B. Research on Collision Avoidance Methods for Unmanned Surface Vehicles Based on Boundary Potential Field. J. Mar. Sci. Eng. 2025, 13, 88. https://doi.org/10.3390/jmse13010088
Li Y, Hou P, Cheng C, Wang B. Research on Collision Avoidance Methods for Unmanned Surface Vehicles Based on Boundary Potential Field. Journal of Marine Science and Engineering. 2025; 13(1):88. https://doi.org/10.3390/jmse13010088
Chicago/Turabian StyleLi, Yongzheng, Panpan Hou, Chen Cheng, and Biwei Wang. 2025. "Research on Collision Avoidance Methods for Unmanned Surface Vehicles Based on Boundary Potential Field" Journal of Marine Science and Engineering 13, no. 1: 88. https://doi.org/10.3390/jmse13010088
APA StyleLi, Y., Hou, P., Cheng, C., & Wang, B. (2025). Research on Collision Avoidance Methods for Unmanned Surface Vehicles Based on Boundary Potential Field. Journal of Marine Science and Engineering, 13(1), 88. https://doi.org/10.3390/jmse13010088