The Hydrodynamic Similarity between Different Power Levels and a Dynamic Analysis of Ocean Current Energy Converter–Platform Systems with a Novel Pulley–Traction Rope Design for Irregular Typhoon Waves and Currents


Abstract
1. Introduction
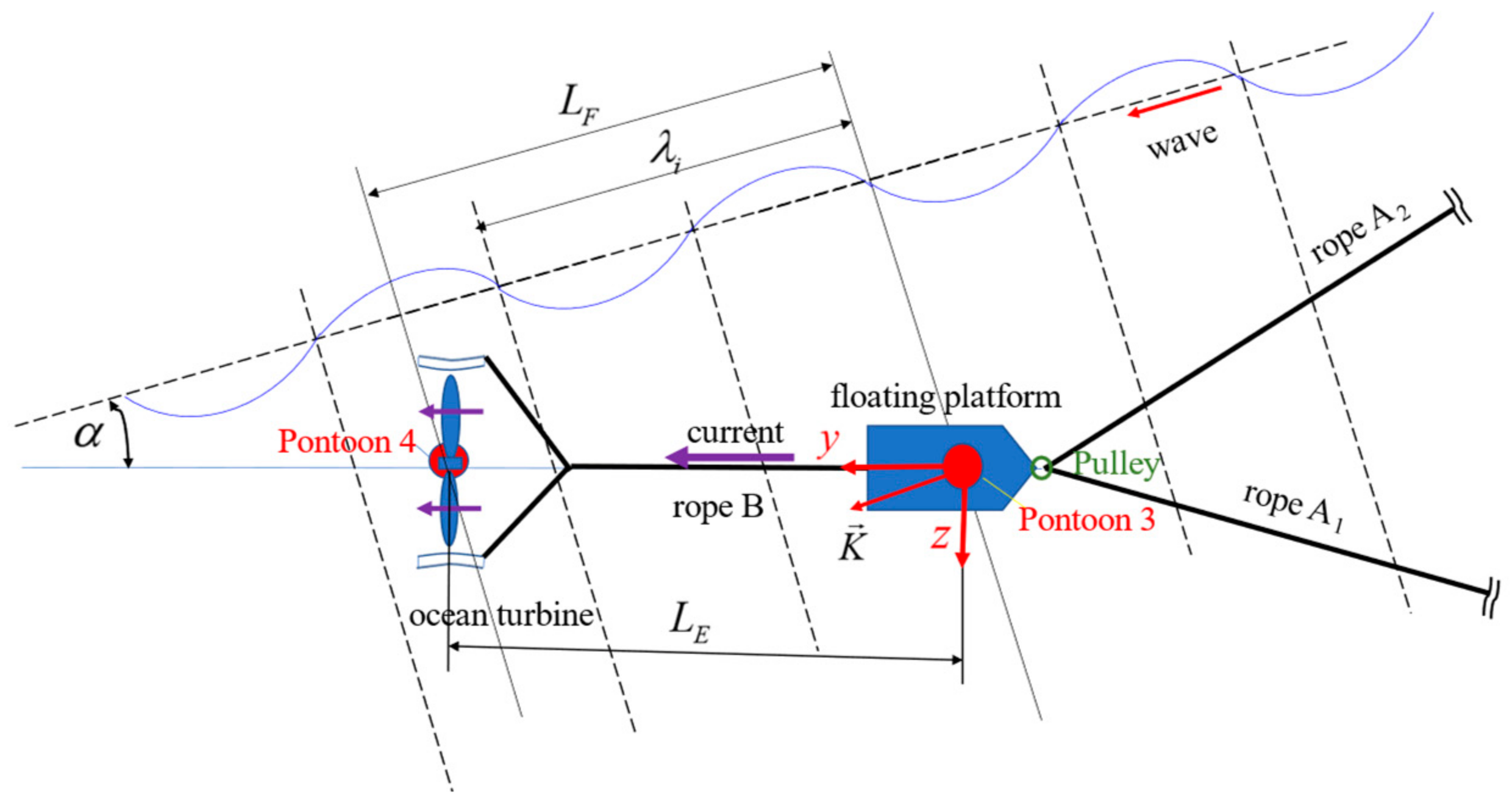
2. Mathematical Model
3. Static Displacements and Equilibrium under a Steady Current Only
3.1. Static Displacements
3.2. Static Force Equilibrium
3.3. Solution Method of Static Equilibrium and Displacements
3.4. Static Numerical Results
4. Dynamic Analysis
4.1. Similarity of System
4.1.1. Hydrodynamic Similarity for the Convertor
Similarity without FSI
Similarity with FSI
4.1.2. Hydrodynamic Similarity for Platform
Similarity without FSI
Similarity with FSI
4.1.3. Geometrical Inertia and Buoyance Similarities
4.1.4. Some Similarity Results of Convertors
4.2. Translational Motion in the x-Axis Direction
4.2.1. Equation of Heaving Motion for Pontoon 3
4.2.2. Equation of Heaving Motion for Pontoon 4
4.2.3. Equation of Heaving Motion of the Platform
4.2.4. Equation of Heaving Motion for the Convertor
4.3. Translational Motion in the y-Direction
4.3.1. Equation of Surging Motion of Platform
4.3.2. Equation of Surging Motion of the Convertor in the y-Direction
4.3.3. Equation of Surging Motion of Pontoon 3 in the y-Direction
4.3.4. Equation of Surging Motion of Pontoon 4 in the y-Direction
4.4. Translational Motion in the z-Direction
4.4.1. Equation of Swaying Motion of Platform
4.4.2. Equation of Swaying Motion of Convertor
4.4.3. Equation of Swaying Motion for Pontoon 3
4.4.4. Equation of Swaying Motion of Pontoon 4
4.5. Rotational Motion
4.5.1. Equation of Yawing Motion of Convertor
4.5.2. Equation of Rolling Motion of Convertor
4.5.3. Equation of Pitching Motion of Convertor
4.5.4. Equation of Yawing Motion of Platform
4.5.5. Equation of Rolling Motion of Platform
4.5.6. Equation of Pitching Motion of Platform
4.6. Solution Method of Dynamic Displacements
4.7. Dynamic Tensions of Ropes
5. Dynamic Response and Discussion
6. Conclusions
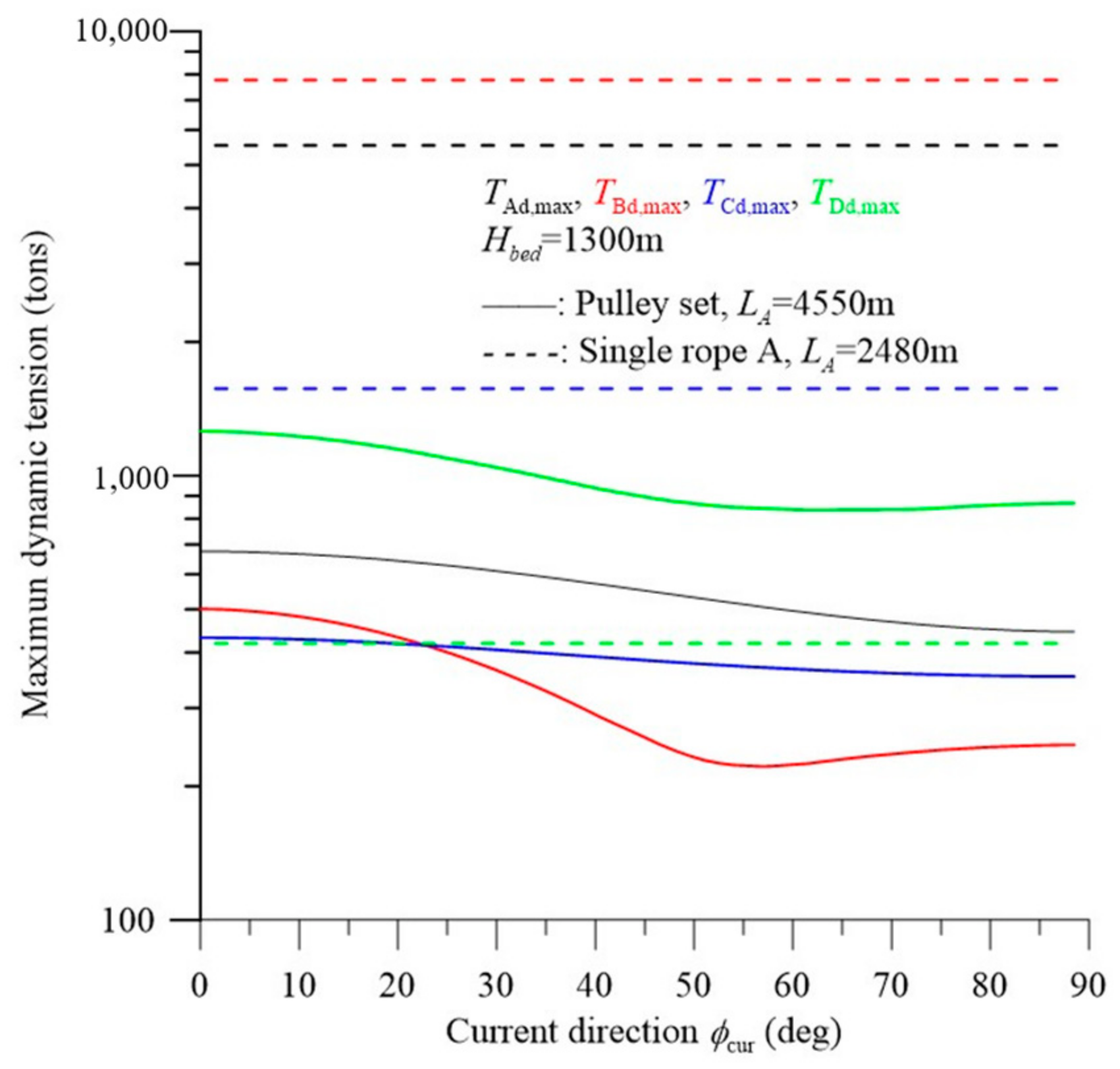
- The dynamic rope tensions TAd,max and TBd,max of the traditional single-traction-rope system are larger than the fracture strength of Tfrac = 2000 tons. However, all the dynamic tensions of the pulley–rope system are smaller than the fracture strength. Obviously, the pulley–rope design can effectively reduce the dynamic rope tensions.
- The dynamic responses of the above two kinds of mooring systems are different. The traditional single-traction-rope system is not affected by flow direction, but the pulley–rope system is.
- The static tension of rope A of the proposed system under a steady current only is close to half of that for the traditional single-traction-rope system.
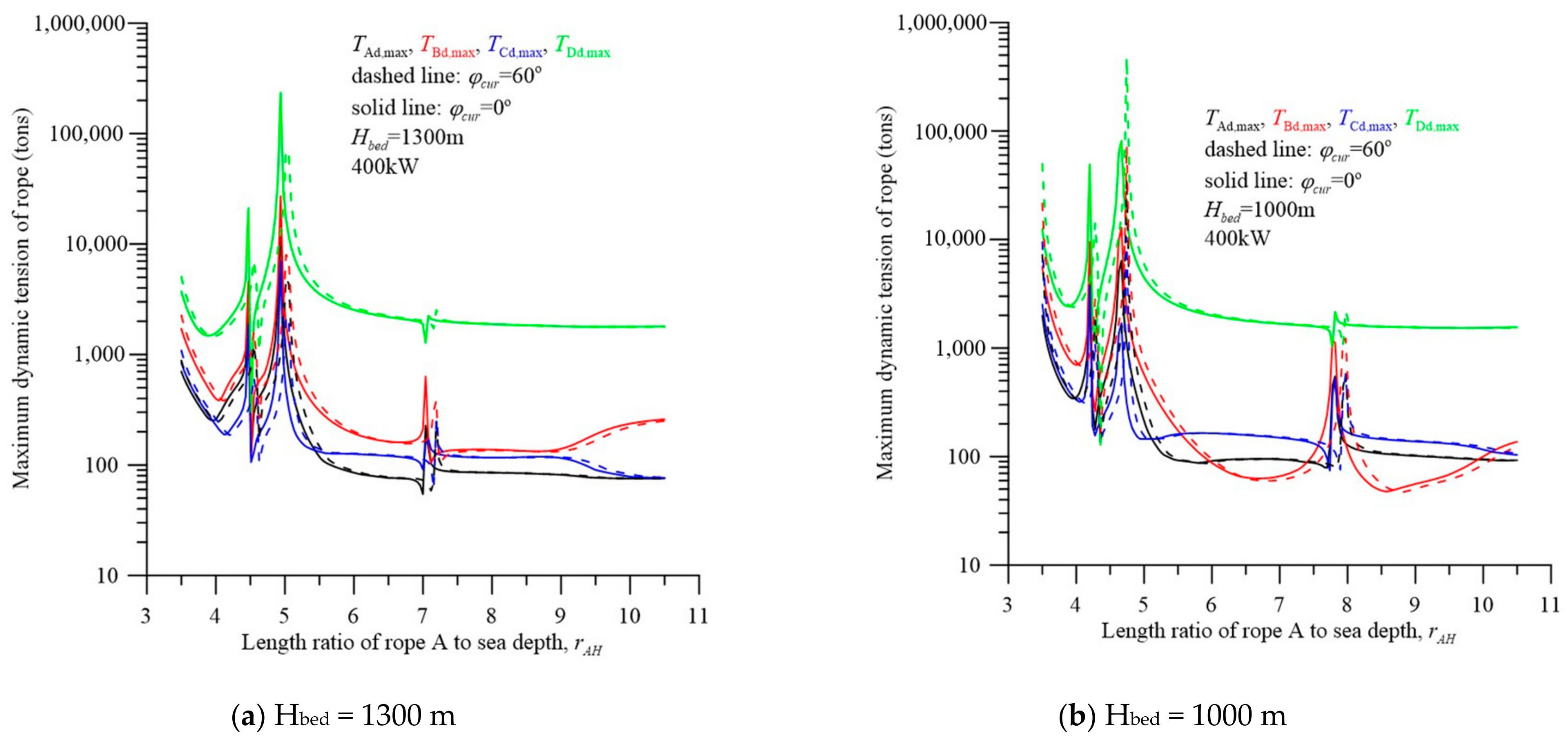
- For Hbed = 1300 m, if the traction rope length ratio is , all the dynamic tensions will be smaller than the fracture strength. For Hbed = 1000 m, if the rope length ratio is , all the dynamic tensions will be smaller than the fracture strength.
- In this mooring system, the dynamic tension of rope D is at a maximum, but we can increase its fracture strength for improved safety. The length of rope D is short and economic.
- If the traction rope length ratio rAH is over the critical value, the larger the ratio rAH, the higher the safety factor of the rope.
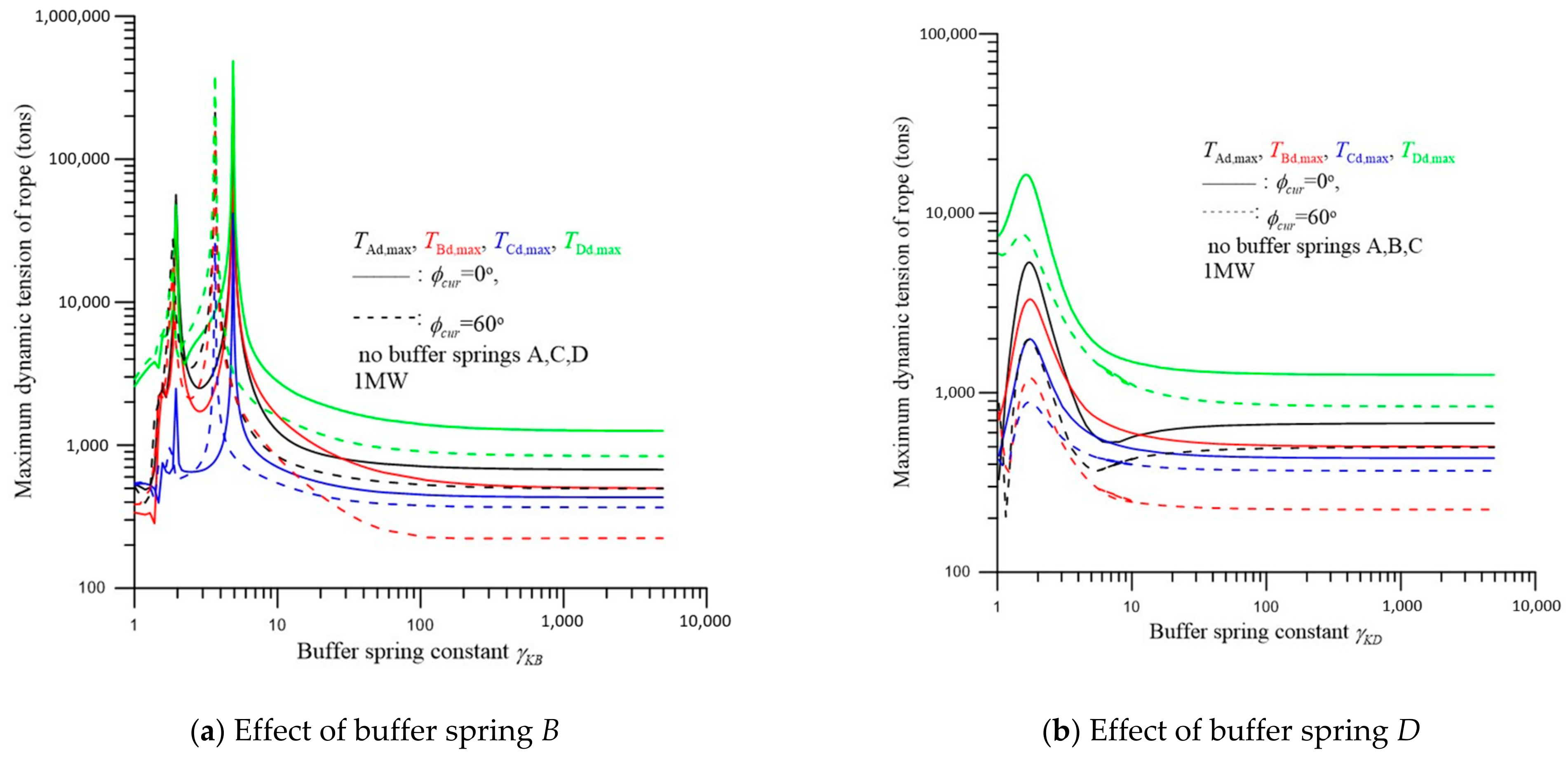
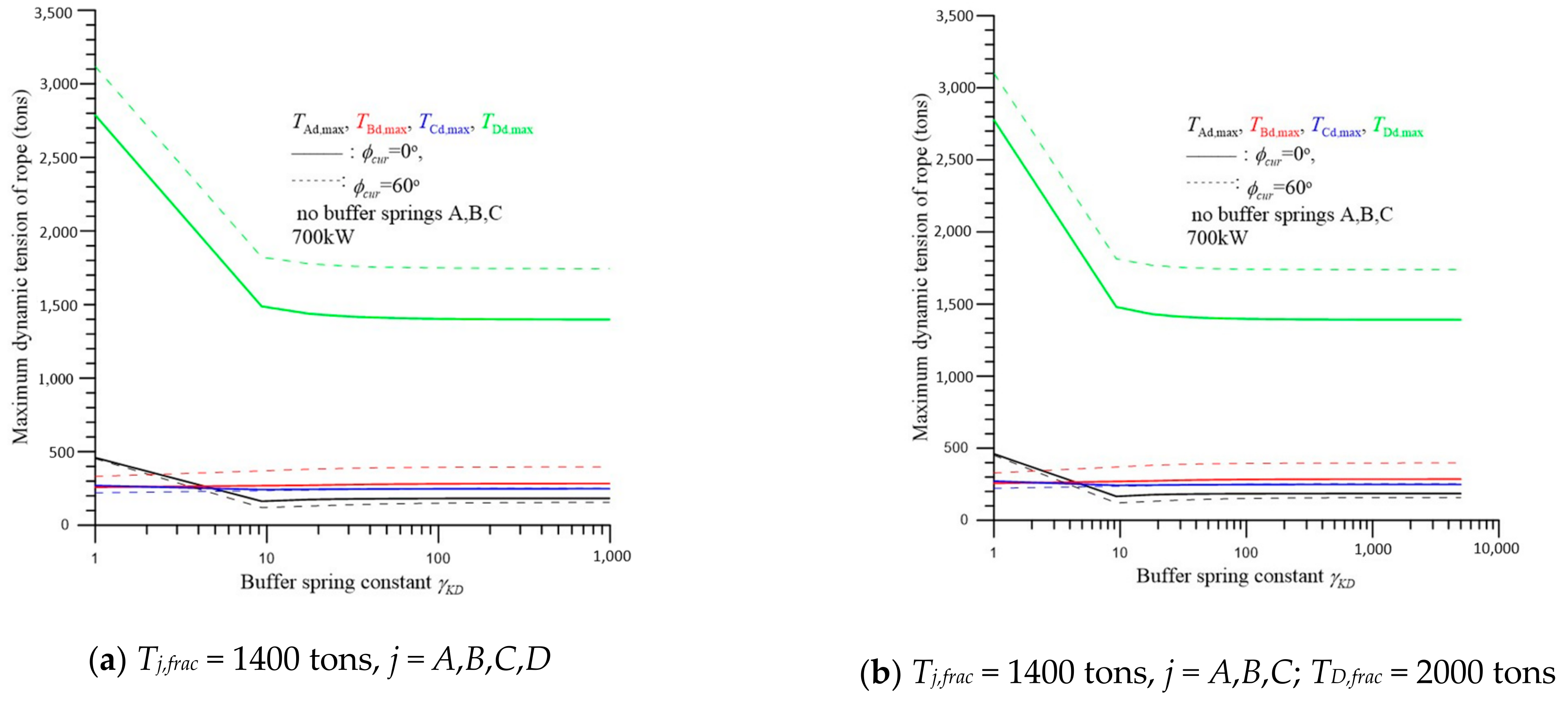
- In an MW-level power generation system with the pulley–rope design, if the buffer spring constant is very small, the dynamic tension may become greater than the fracture strength. However, when no buffer spring is set, the opposite occurs.
- According to the theoretical analysis, the proposed MW-level ocean convertor mooring system with the pulley–rope design can be safely used even under the impact of a typhoon wave.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| ai | amplitude of the i-th regular wave |
| ABX: ABT | cross-sectional area of the surface cylinder of Pontoons 3 and 4, respectively |
| ABY, ATY | damping area of the platform and convertor under a current, respectively |
| damping coefficient of the floating platform and convertor | |
| Ei | Young’s modulus of rope i; i = A, B, C, and D |
| FB | buoyance |
| fp | significant frequency |
| fkj | hydrodynamic force of element k in the j-direction |
| , | drag of the floating platform and convertor under a steady current |
| Hbed | depth of the seabed |
| Hs | significant wave height |
| mass moment of inertia of the convertor and platform about the j-axis | |
| g | gravity |
| Kid | effective spring constant of rope i; |
| wave vector of the i-th regular wave | |
| Li | length of rope i |
| LE | horizontal distance between the convertor and platform; |
| Mi | mass of element i |
| effective mass of rope A in the i-direction | |
| hydrodynamic moment of the convertor or platform about the i-axis | |
| coordinate | |
| rd | scaling factor |
| distance between the center of gravity of the convertor and rope B about the x-axis | |
| distance between the center of gravity of the convertor and rope D about the y-axis | |
| distance between the center of gravity of the convertor and rope B about the z-axis | |
| , | distance from the center of gravity to ropes A and B, respectively, in the y-z plane |
| , | distance from the center of gravity to ropes A and C, respectively, in the x-z plane |
| , , | distance from the center of gravity to ropes A, B, and C, respectively, in the x-y plane |
| Ti | tension force of rope i |
| t | time variable |
| V | ocean current velocity |
| Wi | weight of component i |
| wPE | weight per unit length of HMPE |
| xi, yi, zi | displacements of component i |
| xw | sea surface elevation |
| α | relative angle between the directions of the wave and current |
| ρ | density of sea water |
| ωT | angular speed of a turbine |
| Ω | angular frequency of a wave |
| angular displacement of the convertor or platform about the j-axis | |
| phase delay of a wave; | |
| θi | angles of rope i |
| λ | length of a wave |
| δi | elongation of rope i |
| Subscripts: | |
| 0~4 | mooring foundation, floating platform, convertor, and two pontoons, respectively |
| A, B, C, D | ropes A, B, C, and D, respectively |
| mod | model |
| iα, iβ | components α and β of rope i; i = A, B, C, and D |
| frac | fracture |
| s, d | static and dynamic, respectively |
| PE | PE Dyneema rope |
| P | platform |
| pro | prototype |
| T | convertor |
Appendix A. Effective Masses of the Double-Traction Sub-Ropes
Appendix B. Elements of Mass Matrix
Appendix C. Elements of the Hydrodynamic Damping Matrix in Similarity Law
Appendix D. Elements of the Stiffness Matrix in Similarity Law
References
- Chen, Y.Y.; Hsu, H.C.; Bai, C.Y.; Yang, Y.; Lee, C.W.; Cheng, H.K.; Shyue, S.W.; Li, M.S. Evaluation of test platform in the open sea and mounting test of KW Kuroshio power-generating pilot facilities. In Proceedings of the 2016 Taiwan Wind Energy Conference, Keelung, Taiwan, 24–25 November 2016. [Google Scholar]
- IHI; NEDO. The Demonstration Experiment of the IHI Ocean Current Turbine Located off the Coast of Kuchinoshima Island, Kagoshima Prefecture, Japan, 14 August 2017. Available online: https://tethys.pnnl.gov/project-sites/ihi-ocean-current-turbine (accessed on 28 August 2021).
- Guo, J.F.; Chiu, F.C.; Tsai, J.F.; Lee, K.Y.; Li, J.H.; Hsin, C.Y. Manufacture and Sea Trial of 20 kW Floating Kuroshio Turbine; NAMR110050; Ocean Affairs Council: Kaohsiung, Taiwan, 2021. (In Chinese) [Google Scholar]
- Lin, S.M.; Chen, Y.Y.; Hsu, H.C.; Li, M.S. Dynamic Stability of an Ocean Current Turbine System. J. Mar. Sci. Eng. 2020, 8, 687. [Google Scholar] [CrossRef]
- Lin, S.M.; Chen, Y.Y.; Liauh, C.T. Dynamic stability of the coupled pontoon-ocean turbine-floater platform-rope system under harmonic wave excitation and steady ocean current. J. Mar. Sci. Eng. 2021, 9, 1425. [Google Scholar] [CrossRef]
- Lin, S.M.; Liauh, C.T.; Utama, D.W. Design and dynamic stability analysis of a submersible ocean current generator-platform mooring system under typhoon irregular wave. J. Mar. Sci. Eng. 2022, 10, 538. [Google Scholar] [CrossRef]
- Lin, S.M.; Utama, D.W.; Liauh, C.T. Coupled translational-rotational stability analysis of a submersible ocean current converter-platform mooring system under typhoon wave. J. Mar. Sci. Eng. 2023, 11, 518. [Google Scholar] [CrossRef]
- Lin, S.M.; Wang, W.R.; Yuan, H. Transient translational-rotational motion of an ocean current converter mooring system with initial conditions. J. Mar. Sci. Eng. 2023, 11, 1533. [Google Scholar] [CrossRef]
- Pierson, W.J., Jr.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of S. A. Kitaigorodskii. J. Geophys. Res. Space Phys. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Anagnostopoulos, S.A. Dynamic response of offshore platforms to extreme waves including fluid-structure interaction. Eng. Struct. 1982, 4, 179–185. [Google Scholar] [CrossRef]
- Belibassakis, K.A. A boundary element method for the hydrodynamic analysis of floating bodies in variable bathymetry regions. Eng. Anal. Bound. Elem. 2008, 32, 796–810. [Google Scholar] [CrossRef]
- Westphalen, J.; Greaves, D.M.; Raby, A.; Hu, Z.Z.; Causon, D.M.; Mingham, C.G.; Omidvar, P.; Stansby, P.K.; Rogers, B.D. Investigation of wave-structure interaction using state of the art CFD techniques. Open J. Fluid Dyn. 2014, 4, 18. Available online: https://www.scirp.org/journal/paperinformation.aspx?paperid=43397 (accessed on 20 December 2022). [CrossRef]
- Geuzaine, P.; Farhat, C.; Brown, G. Application of a three-field nonlinear fluid-structure formulation to the prediction of the aeroelastic parameters of an f-16 fighter. Comput. Fluids 2003, 32, 3–29. [Google Scholar]
- Bathe, K.J.; Nitikitpaiboon, C.; Wang, X. A mixed displacement-based finite element formulation for acoustic fluid-structure interaction. Comput. Struct. 1995, 56, 225–237. [Google Scholar] [CrossRef]
- Wang, Y.Y.L.; Lia, W.C.; Hsiu, H.; Jan, M.Y.; Wang, W.K. Effect of length on the fundamental resonance frequency of arterial models having radial dilatation. IEEE Trans. Biomed. Eng. 2000, 47, 313–318. [Google Scholar] [CrossRef] [PubMed]
- Hodis, S.; Zamir, M. Mechanical events within the arterial wall under the forces of pulsatile flow: A review. J. Mech. Behav. Biomed. Mat. 2011, 4, 1595–1602. [Google Scholar] [CrossRef] [PubMed]
- Tsui, Y.Y.; Huang, Y.C.; Huang, C.L.; Lin, S.W. A finite-volume-based approach for dynamic fluid-structure interaction. Numer. Heat Transf. Part B Fundam. 2013, 64, 326–349. [Google Scholar] [CrossRef]
- Hasanpour, A.; Istrati, D.; Buckle, I. Coupled SPH–FEM Modeling of Tsunami-Borne Large Debris Flow and Impact on Coastal Structures. J. Mar. Sci. Eng. 2021, 9, 1068. [Google Scholar] [CrossRef]
- Shyue, S.W. Development and Promotion of Key Technologies of Ocean Current Energy. OAC108001; Ocean Affairs Council: Kaohsiung, Taiwan, 2019; pp. 4–103. (In Chinese) [Google Scholar]
- Aggarwal, A.; Pákozdi, C.; Bihs, H.; Myrhaug, D.; Chella, M.A. Free Surface Reconstruction for Phase Accurate Irregular Wave Generation. J. Mar. Sci. Eng. 2018, 6, 105. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Dimension | Parameter | Dimension |
|---|---|---|---|
| depth of the seabed Hbed | 1300 m | current velocity, V | 1.5 m/s |
| length of rope A, LA | 5200 m | length of rope B, LB | 170 m |
| length of rope C, LC | 60 m | length of rope D, LD | 140 m |
| Static drag of the convertor, FDT | 59.35 tons | Static drag of the platform, FDB | 0.077 tons |
| Parameters | Similarity Equation | Model [*] [7] | Prototype | ||
|---|---|---|---|---|---|
| Predicted [**] | CFD | Error (%) | |||
| Power (kW) | (33) | 394 # | 1000 | 1023.8 | 2.4 |
| (34) | 0.497 | 0.497 | 0.468 | 5.8 | |
| (40) | 1.066 | 1.066 | 1.017 | 4.6 | |
| (40) | 3.151 | 3.151 | 2.898 | 8.0 | |
| (60) | 0.032 | 0.032 | 0.031 | 3.1 | |
| (61) | 0.034 | 0.034 | 0.035 | 2.9 | |
| (61) | 0.449 | 0.449 | 0.426 | 5.1 | |
| (61) | 0.0455 | 0.0455 | 0.0431 | 5.3 | |
| (70) | 1.417 | 1.417 | 1.453 | 2.5 | |
| Significant Frequency | Parameter | Regular Wave | |||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| Tp = 15.0 s, fp = 0.067 Hz | fi (Hz) | 0.043 | 0.067 | 0.092 | 0.115 | 0.150 | 0.267 |
| ki (1/m) | 0.0073 | 0.0179 | 0.0339 | 0.0533 | 0.0906 | 0.2861 | |
| λi (m) | 863.6 | 350.9 | 185.6 | 117.9 | 69.3 | 22.0 | |
| Tp = 16.5 s, fp = 0.061 Hz | fi (Hz) | 0.043 | 0.061 | 0.086 | 0.115 | 0.150 | 0.267 |
| ki (1/m) | 0.0073 | 0.0148 | 0.0295 | 0.0533 | 0.0906 | 0.2861 | |
| λi (m) | 863.6 | 424.7 | 212.8 | 117.9 | 69.3 | 22.0 | |
| Tp = 17.5 s, fp = 0.057 Hz | fi (Hz) | 0.043 | 0.057 | 0.082 | 0.115 | 0.150 | 0.267 |
| ki (1/m) | 0.0073 | 0.0132 | 0.0272 | 0.0533 | 0.0906 | 0.2861 | |
| λi (m) | 863.6 | 477.6 | 231.2 | 117.9 | 69.3 | 22.0 | |
| (°) | 30 | 60 | 90 | 120 | 170 | 300 | |
| Parameter | Dimension | Parameter | Dimension | |
|---|---|---|---|---|
| length of rope B, LB | 152.97 m | length of rope C, LC | 100 m | |
| length of rope D, LD | 70 m | distance between the two foundations, LF | 2 LA | |
| current velocity, V | 1.5 m/s | net buoyance of the convertor and platform, FBNT/FBNB | 394.9/224.0 tons | |
| static drag of the convertor, FDT | 59.35 tons | static drag of the platform, FDB | 0.08 tons | |
| mass of the platform, M1 | 200 tons | mass of the convertor, M2 | 538 tons | |
| mass of Pontoon 3, M3 | 100 tons | mass of Pontoon 4, M4 | 120 tons | |
| cross-sectional area of the surface cylinder of Pontoons 3 and 4, ABX/ABT | 1.0/1.0 m2 | mass moment of inertia of the convertor about the x, y, and z-axes, | / | |
| No buffer springs A, B, C, or D | - | mass moment of inertia of the platform about the x, y, and z-axes, | / | |
| significant wave height Hs | 10 m | significant period Tp | 16.0 s | |
| relative angle between the current and wave α | 30° | phase angles of the six regular waves used to simulate the irregular waves | 30/60/90/120/170/300° | |
| Rope | A, B, C | D | distance from the center of gravity of the platform and convertor | |
| Young’s modulus EPE | 100 GPa, | 116 GPa, | ||
| weight per unit length wPE | 16.22 kg/m | 26.92 kg/m | ||
| diameter DPE | 154 mm | 187 mm | ||
| cross-sectional area APE | 0.0186 m2 | 0.0276 m2 | ||
| fracture strength Tfrac | 759 tons | 2200 tons | ||
| Parameter | Dimension | Parameter | Dimension | ||
|---|---|---|---|---|---|
| depth of the seabed Hbed | 1300 m | length of rope A, LA | 5980 m | ||
| length of rope B, LB | 152.97 m | length of rope C, LC | 100 m | ||
| length of rope D, LD | 70 m | distance between the two foundations, LF | 1196 m | ||
| current velocity, Vcur | 1.5 m/s | net buoyance of the convertor and platform, FBNT/FBNB | 1543.6/689.2 tons | ||
| static drag of the convertor, FDT | 148.3 tons | static drag of the platform, FDB | 0.192 tons | ||
| mass of the platform, M1 | 790.6 tons | mass of the convertor, M2 | 2126.6 tons | ||
| mass of Pontoon 3, M3 | 395.3 tons | mass of Pontoon 4, M4 | 474.3 tons | ||
| cross-sectional area of the surface cylinder of Pontoon 3, ABX | 5.75 m2 | mass moment of inertia of the convertor about the x, y, and z-axes, | / | ||
| cross-sectional area of the surface cylinder of Pontoon 4, ABT | 5.75 m2 | mass moment of inertia of the platform about the x, y, and z-axes, | / | ||
| significant wave height Hs | 15.4 m | significant period Tp | 16.5 s | ||
| relative angle between the current and wave α | 30° | phase angles of the six regular waves used to simulate the irregular waves | 30/60/90/120/170/300° | ||
| HMPE/ Dyneema® SK75 | Young’s modulus EPE | 116 GPa, | distance from the center of gravity of the platform and convertor | ||
| weight per unit length wPE | 24.47 kg/m | ||||
| diameter DPE | 178.9 mm | ||||
| cross-sectional area APE | 0.0251 m2 | ||||
| fracture strength Tfrac | 2000 tons | ||||
| Parameter | Dimension | Parameter | Dimension | |
|---|---|---|---|---|
| depth of the seabed, Hbed | 1300 m | length of rope A, LA | 5980 m | |
| length of rope B, LB | 152.97 m | length of rope C, LC | 100 m | |
| length of rope D, LD | 70 m | distance between the two foundations, LF | 1196 m | |
| current velocity, V | 1.5 m/s | net buoyance of the convertor and platform, FBNT/FBNB | 907.4/407.9 tons | |
| static drag of the convertor, FDT | 103.9 tons | static drag of the platform, FDB | 0.134 tons | |
| mass of the platform, M1 | 463.0 tons | mass of the convertor, M2 | 1245.5 tons | |
| mass of Pontoon 3, M3 | 213.5 tons | mass of Pontoon 4, M4 | 277.8 tons | |
| cross-sectional area of the surface cylinder of Pontoon 3, ABX | 4.03 m2 | mass moment of inertia of the convertor about the x, y, and z-axes, | / | |
| cross-sectional area of the surface cylinder of Pontoon 4, ABT | 4.03 m2 | mass moment of inertia of the platform about the x, y, and z-axes, | / | |
| significant wave height Hs | 15.4 m | significant period Tp | 16.5 s | |
| relative angle between the current and wave α | 30° | phase angles of the six regular waves used to simulate the irregular waves | 30/60/90/120/170/300° | |
| HMPE/ Dyneema® SK75 | Young’s modulus EPE | 116 GPa, | distance from the center of gravity of the platform and convertor | |
| weight per unit length wPE | 17.16 kg/m | |||
| diameter DPE | 149.7 mm | |||
| cross-sectional area APE | 0.0176 m2 | |||
| fracture strength Tfrac | 1400 tons | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, S.-M.; Wang, W.-R.; Yuan, H. The Hydrodynamic Similarity between Different Power Levels and a Dynamic Analysis of Ocean Current Energy Converter–Platform Systems with a Novel Pulley–Traction Rope Design for Irregular Typhoon Waves and Currents. J. Mar. Sci. Eng. 2024, 12, 1670. https://doi.org/10.3390/jmse12091670
Lin S-M, Wang W-R, Yuan H. The Hydrodynamic Similarity between Different Power Levels and a Dynamic Analysis of Ocean Current Energy Converter–Platform Systems with a Novel Pulley–Traction Rope Design for Irregular Typhoon Waves and Currents. Journal of Marine Science and Engineering. 2024; 12(9):1670. https://doi.org/10.3390/jmse12091670
Chicago/Turabian StyleLin, Shueei-Muh, Wen-Rong Wang, and Hsin Yuan. 2024. "The Hydrodynamic Similarity between Different Power Levels and a Dynamic Analysis of Ocean Current Energy Converter–Platform Systems with a Novel Pulley–Traction Rope Design for Irregular Typhoon Waves and Currents" Journal of Marine Science and Engineering 12, no. 9: 1670. https://doi.org/10.3390/jmse12091670
APA StyleLin, S.-M., Wang, W.-R., & Yuan, H. (2024). The Hydrodynamic Similarity between Different Power Levels and a Dynamic Analysis of Ocean Current Energy Converter–Platform Systems with a Novel Pulley–Traction Rope Design for Irregular Typhoon Waves and Currents. Journal of Marine Science and Engineering, 12(9), 1670. https://doi.org/10.3390/jmse12091670