
YOLO-Based 3D Perception for UVMS Grasping


Abstract
1. Introduction
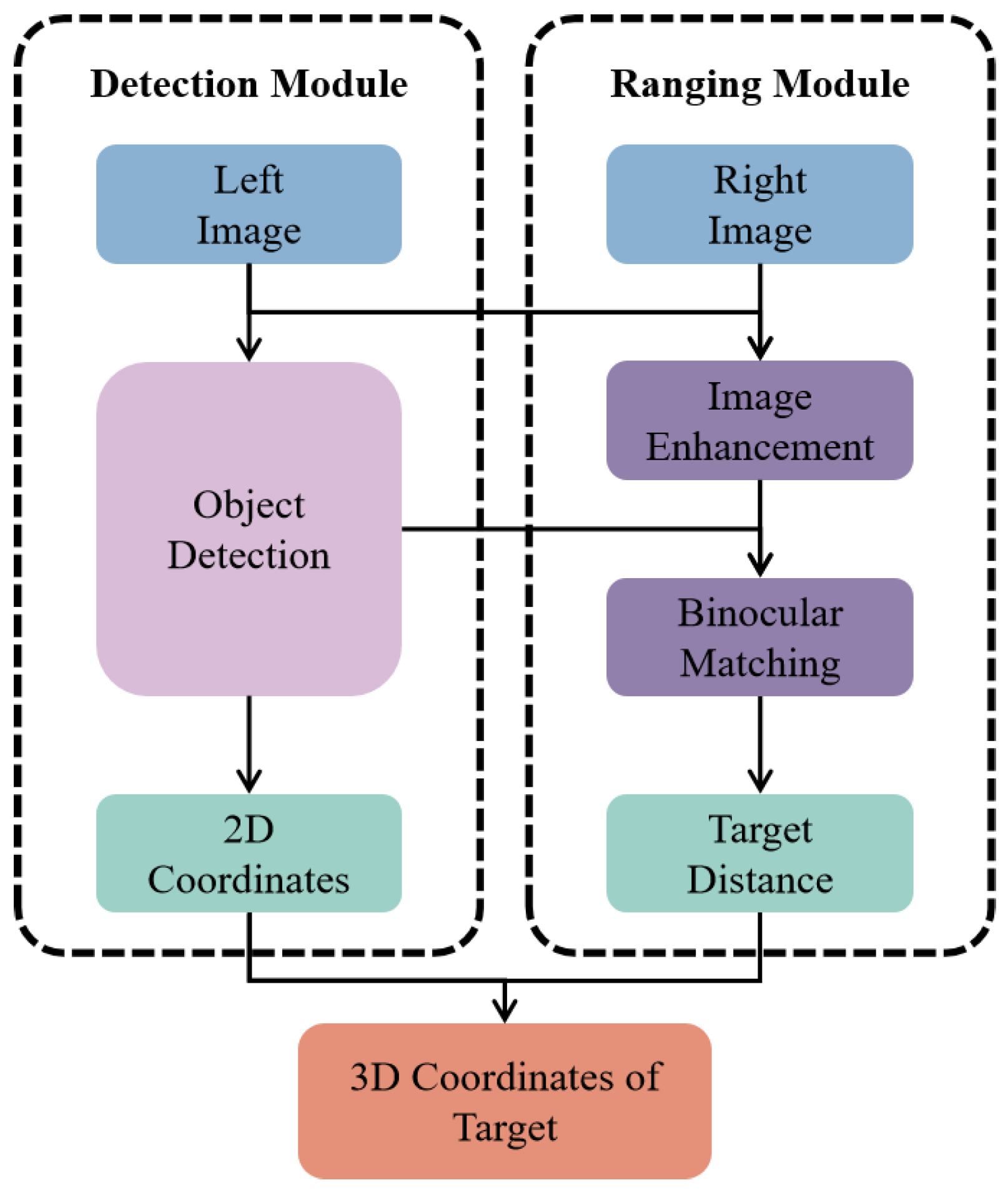
2. Methodology
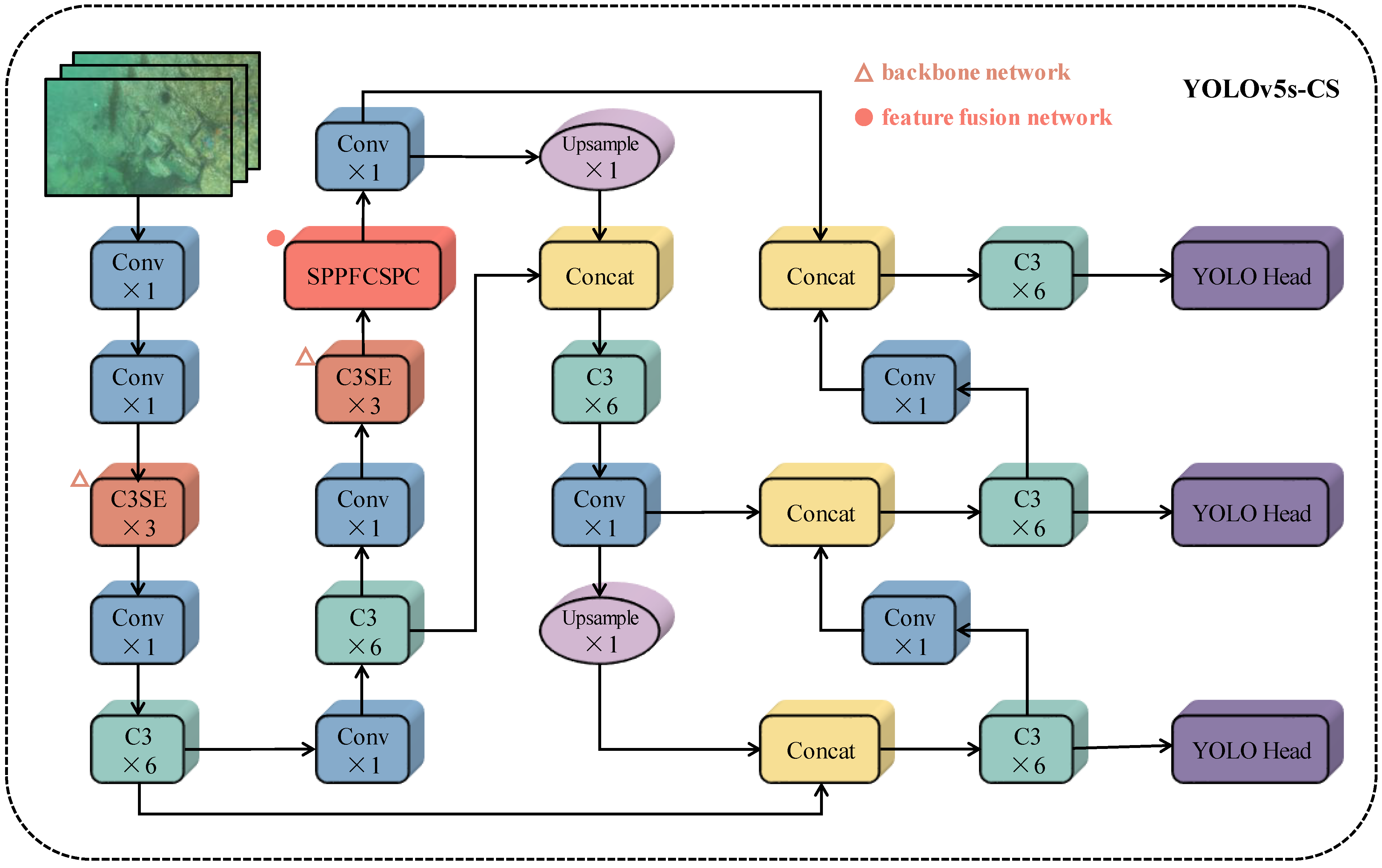
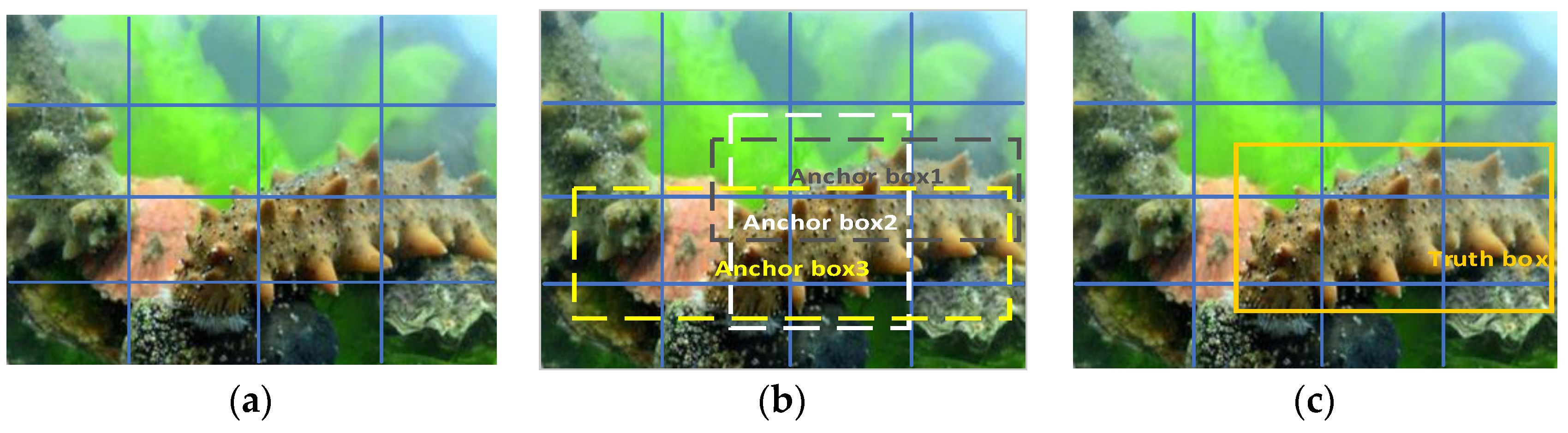
2.1. YOLOv5s-CS Object Detection Algorithm
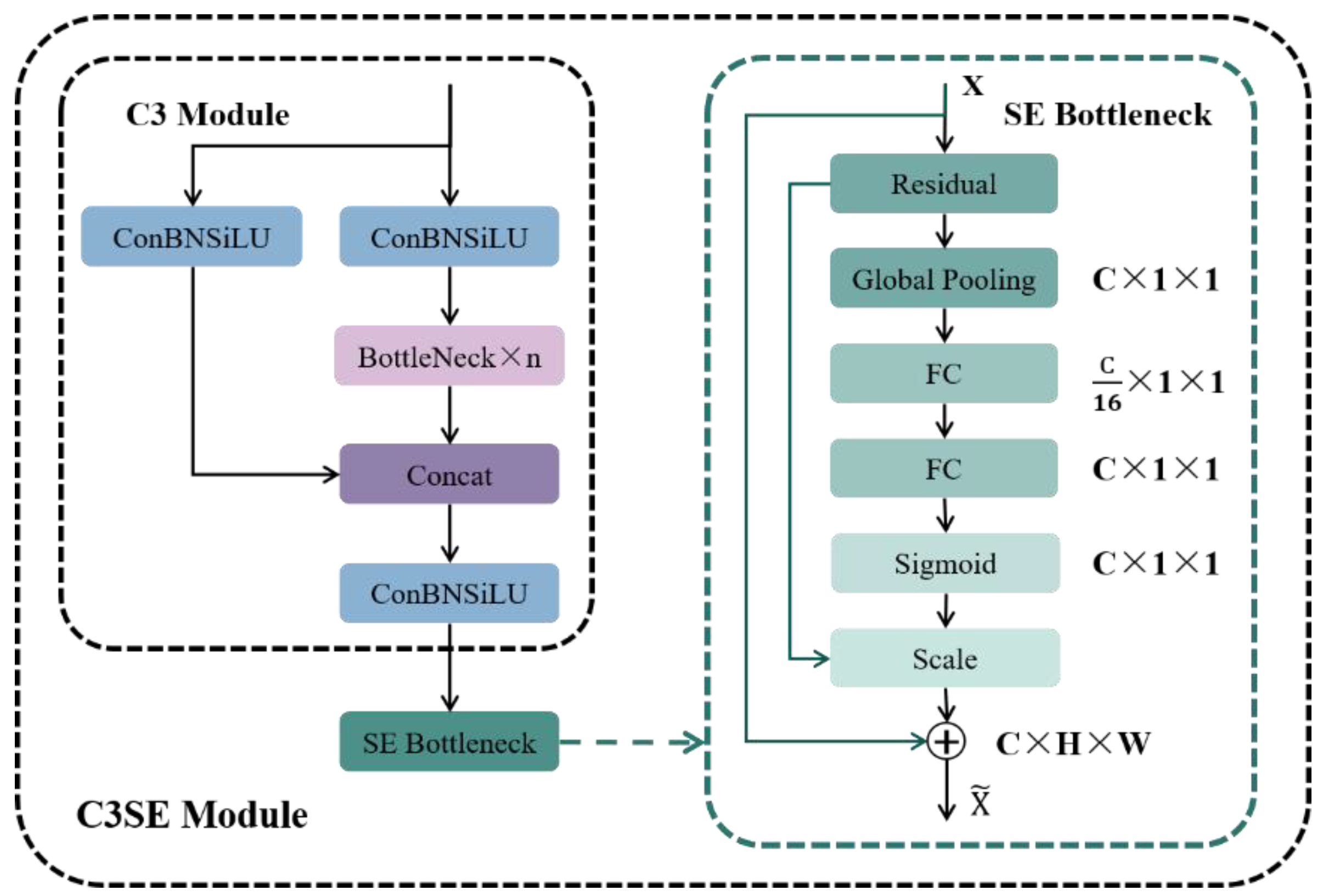
2.1.1. Optimization of Backbone Networks
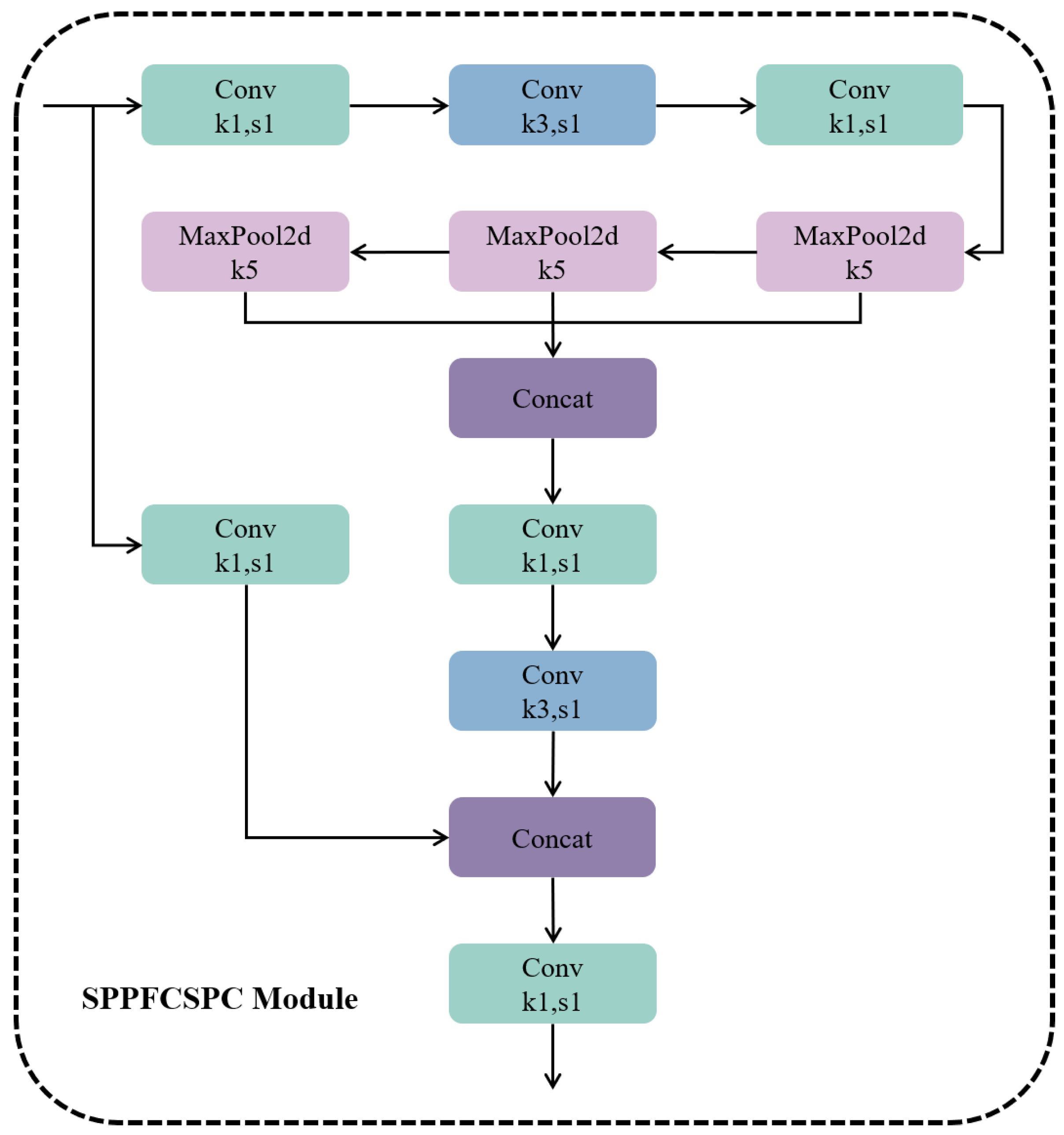
2.1.2. Optimization of Feature Fusion Networks
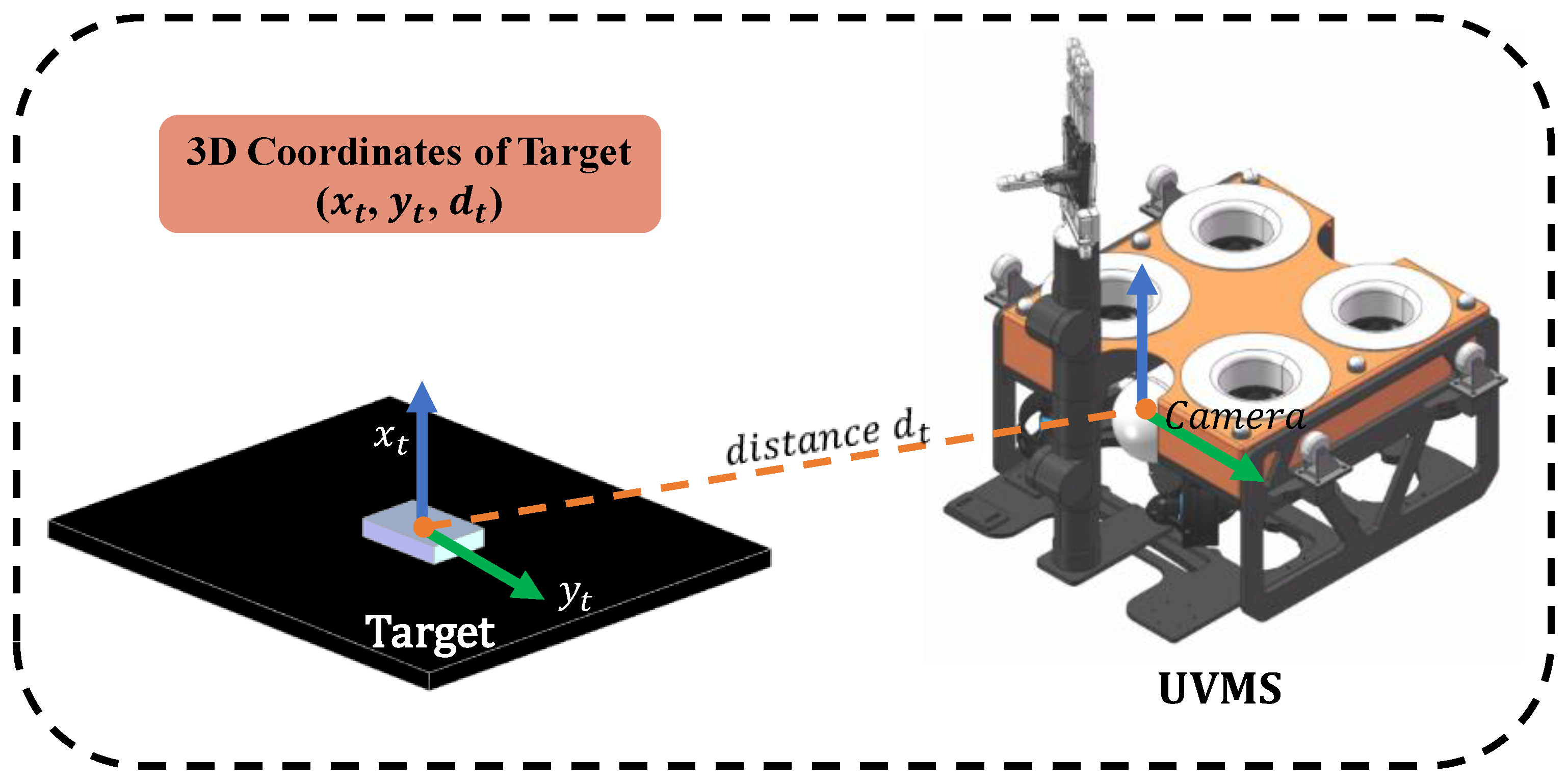
2.2. Stereo Distance Measurement of Underwater Targets
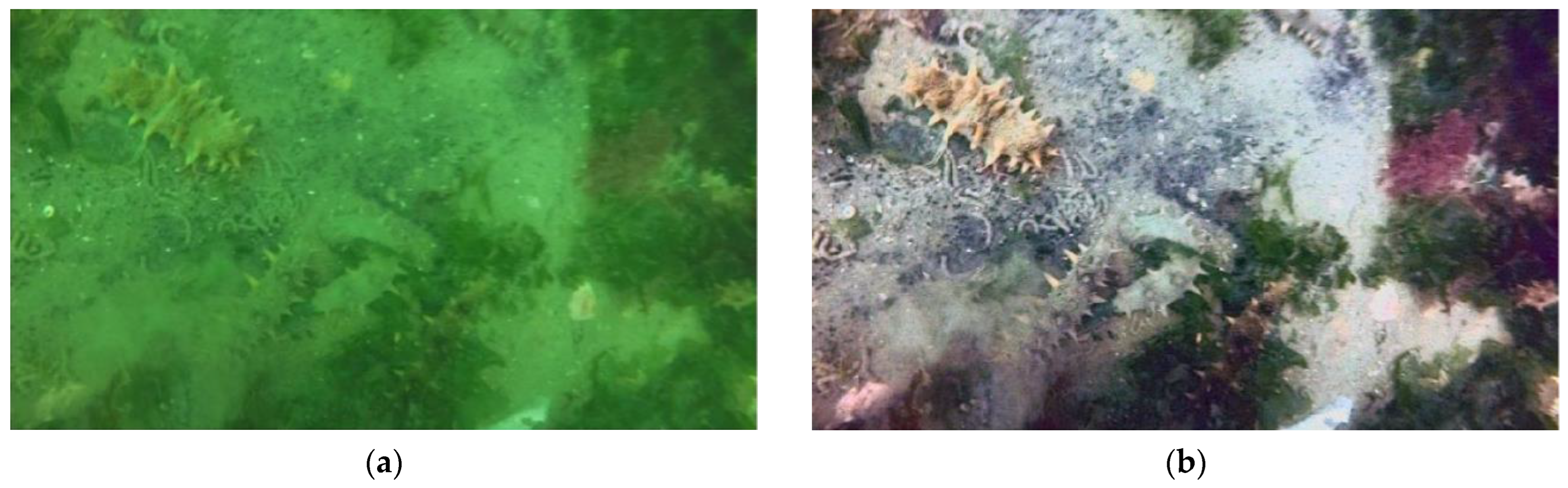
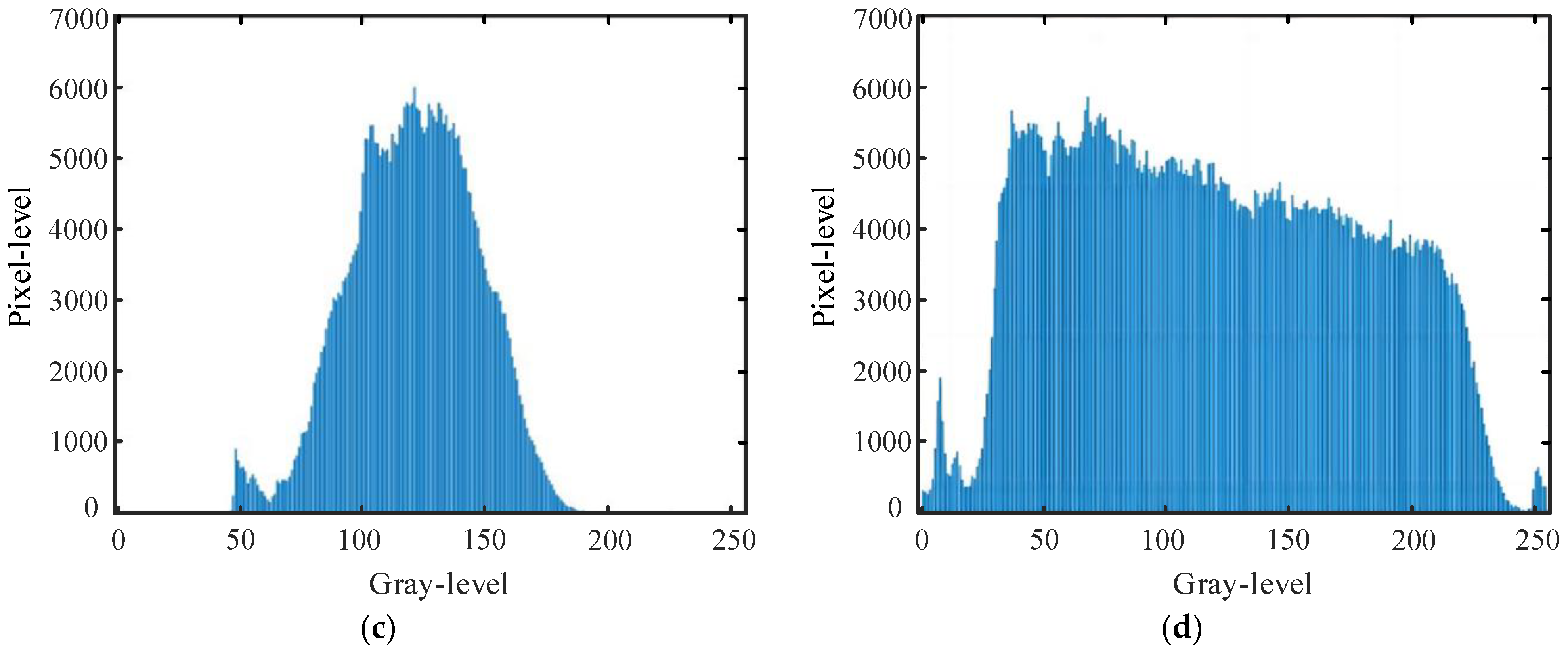
2.2.1. Underwater Image Enhancement
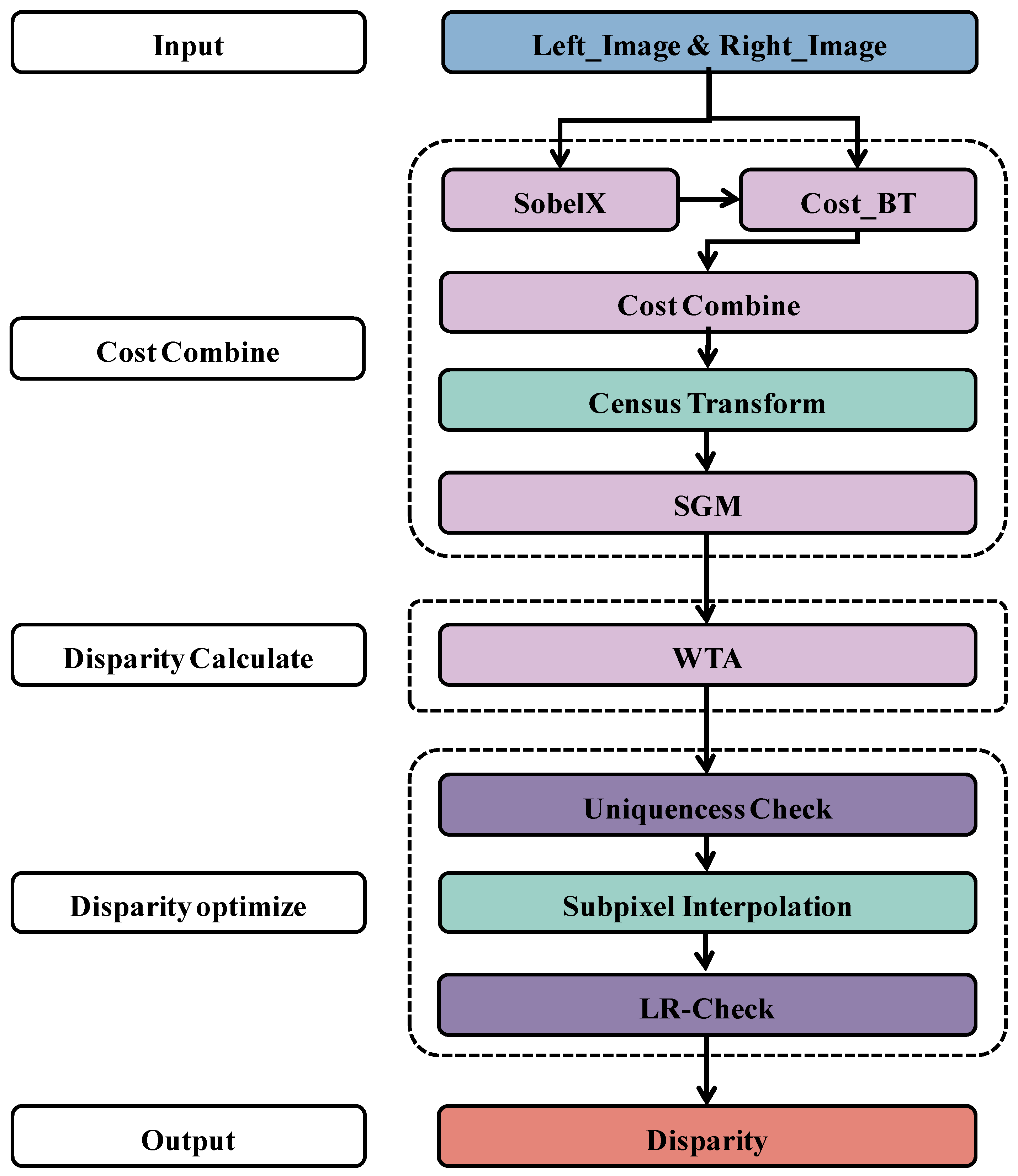
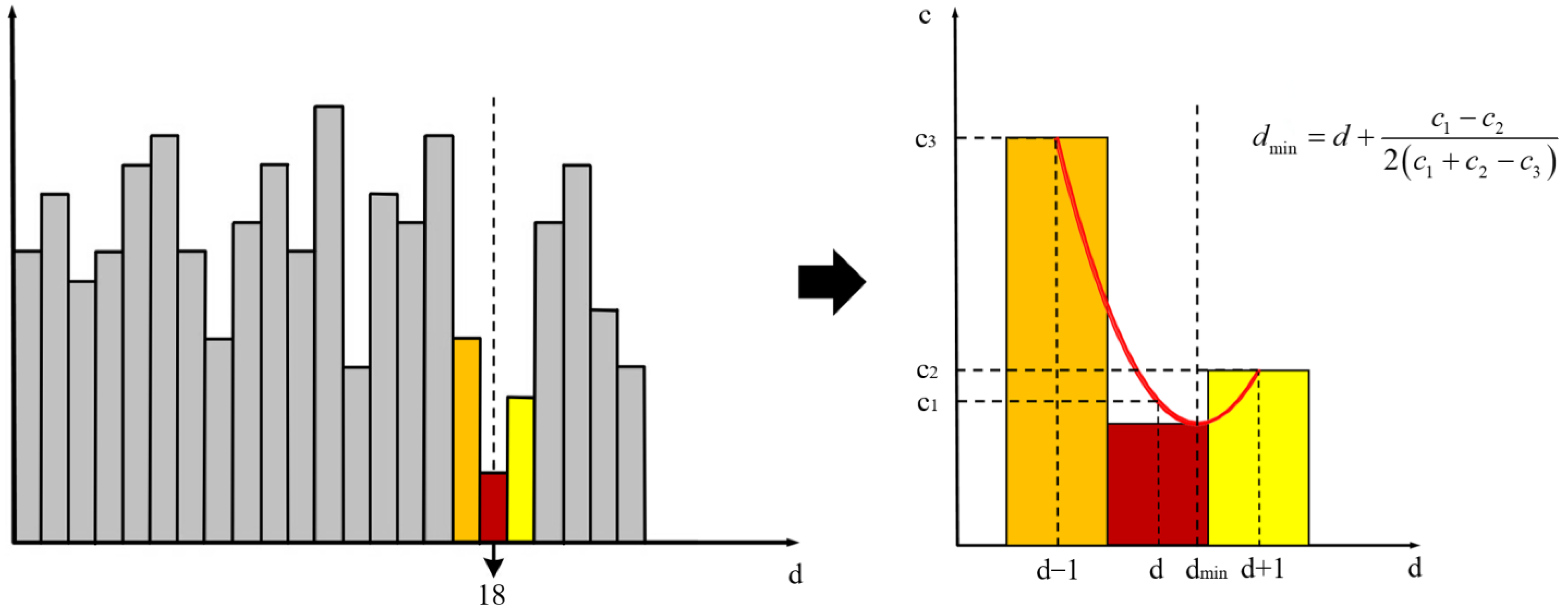
2.2.2. Optimization of Stereo Vision-Matching Algorithms
3. Experiments and Result Analysis
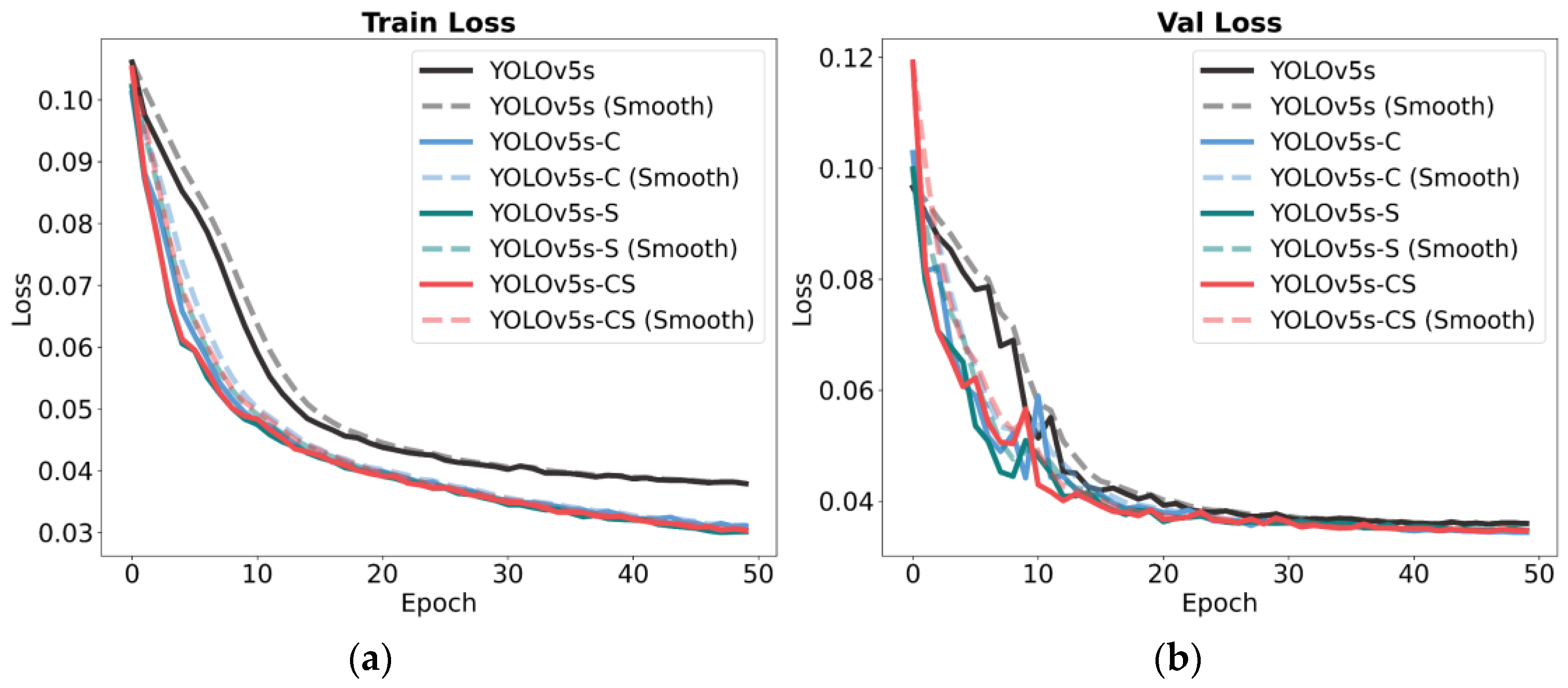
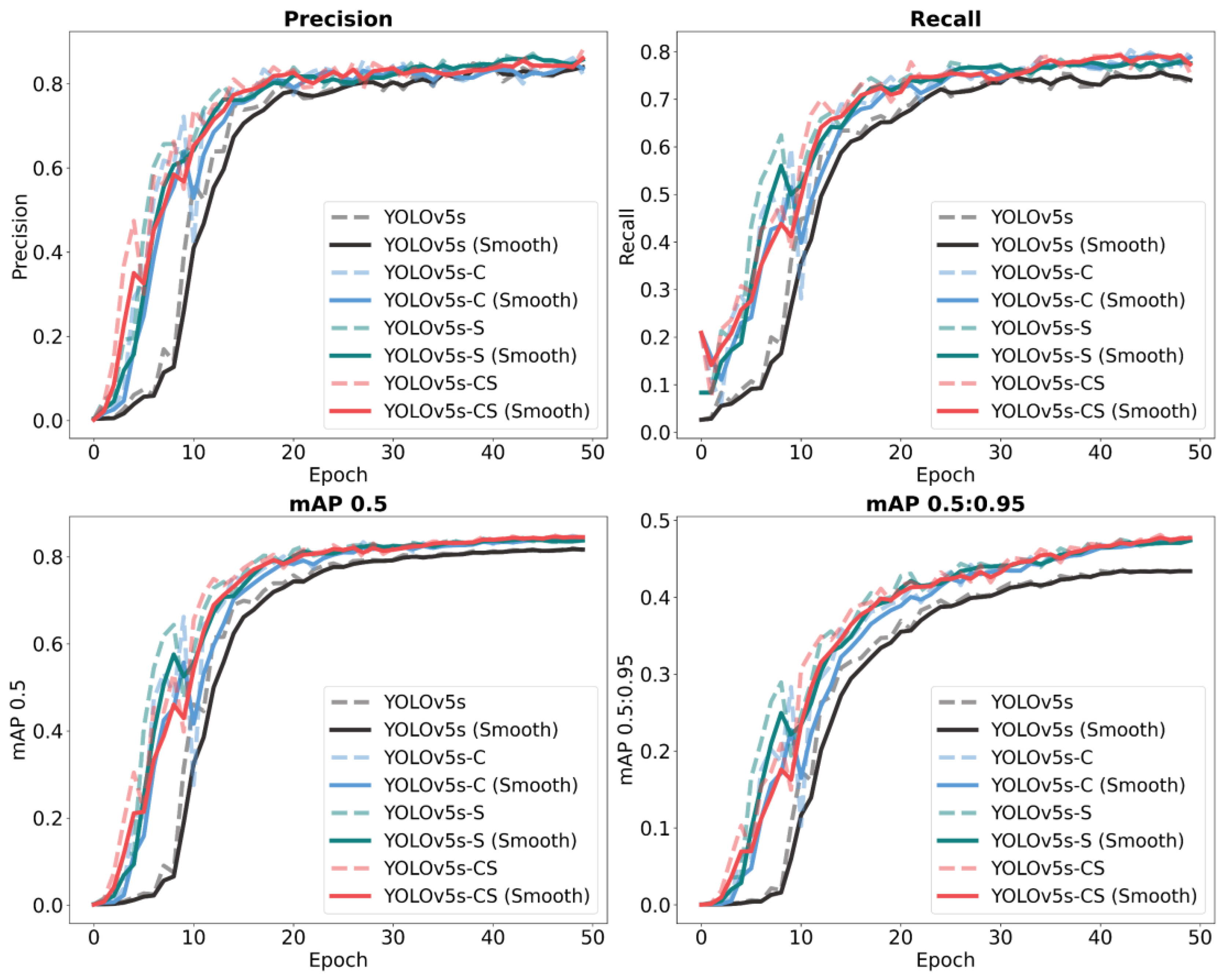
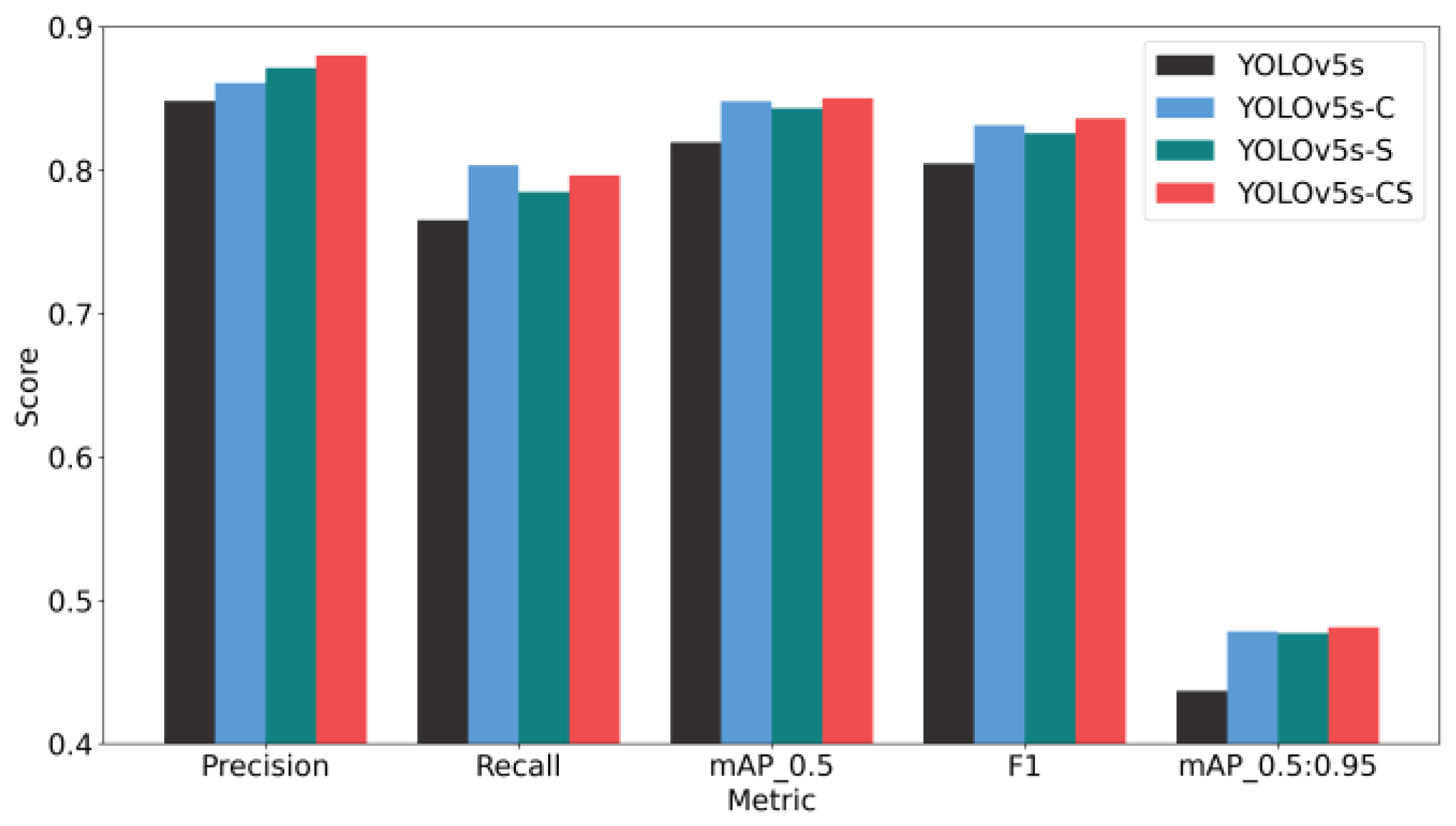
3.1. Ablation Experiments
3.2. Stereo Distance Measurement Experiment
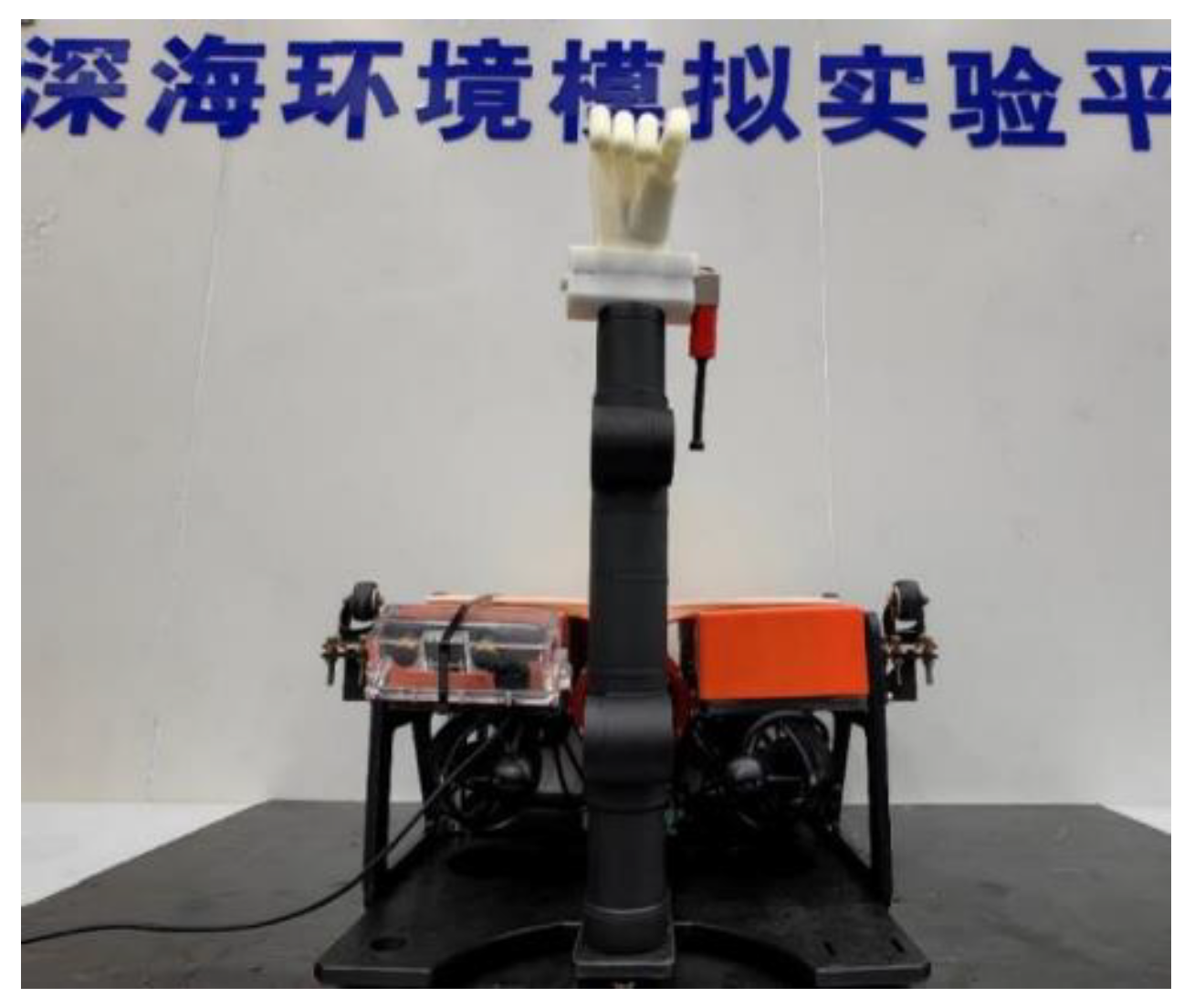
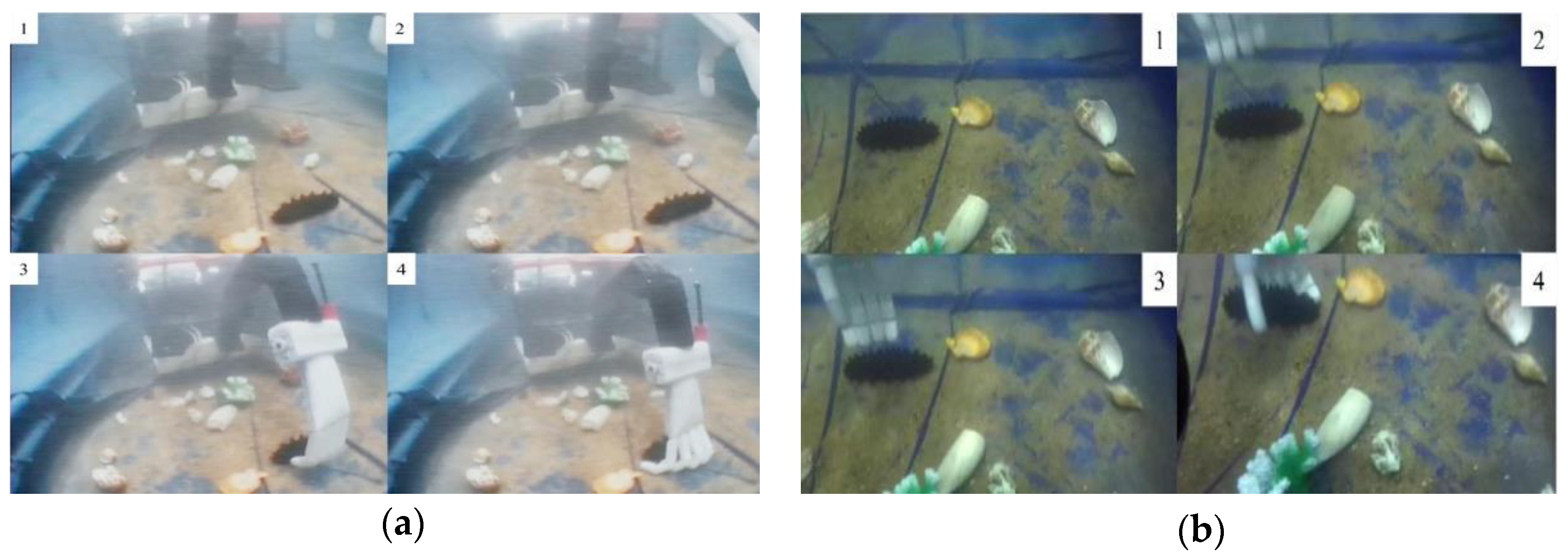
3.3. Real-World UVMS Grasping Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Guo, J.; Guo, X.; Zhao, J.; Yang, Y.; Hu, Z.; Jin, W.; Tian, Y. Toward in situ zooplankton detection with a densely connected YOLOV3 model. Appl. Ocean Res. 2021, 114, 102783. [Google Scholar] [CrossRef]
- Huang, H.; Bian, X.; Cai, F.; Li, J.; Jiang, T.; Zhang, Z.; Sun, C. A review on visual servoing for underwater vehicle manipulation systems automatic control and case study. Ocean Eng. 2022, 260, 112065. [Google Scholar] [CrossRef]
- Antonelli, G. (Ed.) Modelling of Underwater Robots. In Underwater Robots; Springer International Publishing: Cham, Switzerland, 2014; pp. 23–63. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, M.; Song, W.; Mei, H.; He, Q.; Liotta, A. A systematic review and analysis of deep learning-based underwater object detection. Neurocomputing 2023, 527, 204–232. [Google Scholar] [CrossRef]
- Zha, B.; Yuan, H.; Tan, Y. Ranging precision for underwater laser proximity pulsed laser target detection. Opt. Commun. 2019, 431, 81–87. [Google Scholar] [CrossRef]
- Huy, D.Q.; Sadjoli, N.; Azam, A.B.; Elhadidi, B.; Cai, Y.; Seet, G. Object perception in underwater environments: A survey on sensors and sensing methodologies. Ocean Eng. 2023, 267, 113202. [Google Scholar] [CrossRef]
- Lei, F.; Tang, F.; Li, S. Underwater Target Detection Algorithm Based on Improved YOLOv5. J. Mar. Sci. Eng. 2022, 10, 310. [Google Scholar] [CrossRef]
- Yuan, X.; Fang, S.; Li, N.; Ma, Q.; Wang, Z.; Gao, M.; Tang, P.; Yu, C.; Wang, Y.; Martínez Ortega, J.-F. Performance Comparison of Sea Cucumber Detection by the Yolov5 and DETR Approach. J. Mar. Sci. Eng. 2023, 11, 2043. [Google Scholar] [CrossRef]
- Zhai, X.; Wei, H.; Wu, H.; Zhao, Q.; Huang, M. Multi-target tracking algorithm in aquaculture monitoring based on deep learning. Ocean Eng. 2023, 289, 116005. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, J.; Gong, Q.; Huang, C.; Zheng, G.; Ma, J. Real-Time Underwater Maritime Object Detection in Side-Scan Sonar Images Based on Transformer-YOLOv5. Remote Sens. 2021, 13, 3555. [Google Scholar] [CrossRef]
- Xuan, K.; Deng, L.; Xiao, Y.; Wang, P.; Li, J. SO-YOLOv5: Small object recognition algorithm for sea cucumber in complex seabed environment. Fish. Res. 2023, 264, 106710. [Google Scholar] [CrossRef]
- Zhang, L.; Fan, J.; Qiu, Y.; Jiang, Z.; Hu, Q.; Xing, B.; Xu, J. Marine zoobenthos recognition algorithm based on improved lightweight YOLOv5. Ecol. Inform. 2024, 80, 102467. [Google Scholar] [CrossRef]
- Li, Y.; Wang, B.; Li, Y.; Liu, Z.; Huo, W.; Li, Y.; Cao, J. Underwater object tracker: UOS Track for marine organism grasping of underwater vehicles. Ocean Eng. 2023, 285, 115449. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, M.; Wang, S.; Bai, X.; Wang, R.; Tan, M. Development and Control of an Underwater Vehicle–Manipulator System Propelled by Flexible Flippers for Grasping Marine Organisms. IEEE Trans. Ind. Electron. 2022, 69, 3898–3908. [Google Scholar] [CrossRef]
- Liu, J.; Song, Z.; Lu, Y.; Yang, H.; Chen, X.; Duo, Y.; Chen, B.; Kong, S.; Shao, Z.; Gong, Z.; et al. An Underwater Robotic System with a Soft Continuum Manipulator for Autonomous Aquatic Grasping. IEEE-ASME Trans. Mechatron. 2023, 29, 1007–1018. [Google Scholar] [CrossRef]
- Qiu, C.; Wu, Z.; Kong, S.; Yu, J. An Underwater Micro Cable-Driven Pan-Tilt Binocular Vision System with Spherical Refraction Calibration. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, Q.; Ye, Q.; Yu, D.; Yu, Z.; Liu, Y. A binocular vision-based underwater object size measurement paradigm: Calibration-Detection-Measurement (C-D-M). Measurement 2023, 216, 112997. [Google Scholar] [CrossRef]
- Kong, S.; Fang, X.; Chen, X.; Wu, Z.; Yu, J. A NSGA-II-Based Calibration Algorithm for Underwater Binocular Vision Measurement System. IEEE Trans. Instrum. Meas. 2020, 69, 794–803. [Google Scholar] [CrossRef]
- Jiang, T.; Sun, Y.; Huang, H.; Qin, H.; Chen, X.; Li, L.; Zhang, Z.; Han, X. Binocular Vision-Based Non-Singular Fast Terminal Control for the UVMS Small Target Grasp. J. Mar. Sci. Eng. 2023, 11, 1905. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Wei, Q.; Tan, M.; Zhou, C.; Yu, J. Development of an Underwater Manipulator and Its Free-Floating Autonomous Operation. IEEE-ASME Trans. Mechatron. 2016, 21, 815–824. [Google Scholar] [CrossRef]
- Cai, M.; Wang, Y.; Wang, S.; Wang, R.; Ren, Y.; Tan, M. Grasping Marine Products with Hybrid-Driven Underwater Vehicle-Manipulator System. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1443–1454. [Google Scholar] [CrossRef]
- Lyu, Z.; Wang, C.; Sun, X.; Zhou, Y.; Ni, X.; Yu, P. Real-time ship detection system for wave glider based on YOLOv5s-lite-CBAM model. Appl. Ocean Res. 2024, 144, 103833. [Google Scholar] [CrossRef]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-Excitation Networks. In Proceedings of the 31st IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; IEEE: New York, NY, USA, 2018; pp. 7132–7141. [Google Scholar] [CrossRef]
- Yang, J.; Fu, X.; Hu, Y.; Huang, Y.; Ding, X.; Paisley, J. PanNet: A deep network architecture for pan-sharpening. In Proceedings of the 16th IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; IEEE: New York, NY, USA, 2017; pp. 1753–1761. [Google Scholar] [CrossRef]
- Hirschmueller, H. Stereo processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Guo, Z.; Wu, J.; Tian, Y.; Tang, H.; Guo, X. Real-Time Vehicle Detection Based on Improved YOLO v5. Sustainability 2022, 14, 12274. [Google Scholar] [CrossRef]
- Yeh, C.-H.; Lin, C.-H.; Kang, L.-W.; Huang, C.-H.; Lin, M.-H.; Chang, C.-Y.; Wang, C.-C. Lightweight Deep Neural Network for Joint Learning of Underwater Object Detection and Color Conversion. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6129–6143. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iterative Process |
|---|
| Input: Image is converted to HSV color space, weight parameters are and , and maximum iteration number is . |
| Initialization: Initialize with Gaussian low-pass filter of , , , , iteration count . |
| Loop : |
| Update and by Equation (6); |
| Update by Equation (7); |
| Update and by Equation (8); |
| Update by Equation (9). |
| Termination: Stop when ; otherwise, continue with . |
| Output: Enhanced reflection component and incident component . |
| Environment | Hyperparameter | ||
|---|---|---|---|
| Type | Value | Type | Value |
| GPU | NVIDIA GeForce RTX 3060 | Learning rate | 0.01 |
| CPU | AMD Ryzen 5 3600 | Momentum | 0.937 |
| OS | Ubuntu 20.04 | Batch size | 16 |
| Python | 3.8.19 | Weight decay | 0.0005 |
| CUDA | 11.8 | Epochs | 50 |
| Pytorch | 2.2.1 | Image size | 640 |
| Optimizer | Adam | ||
| Model | Parameters (M) | FLOPs (G) | Weight Size (M) | mAP@0.5 (%) | Speed (FPS) |
|---|---|---|---|---|---|
| YOLOv5s | 7.2 | 16.5 | 14.8 | 81.5 | 155.9 |
| YOLOv6s | 18.5 | 45.2 | 38.7 | 83.4 | 109.1 |
| YOLOv7 | 34.8 | 103.2 | 72.4 | 84.4 | 82.6 |
| YOLOv8s | 11.1 | 28.4 | 22.5 | 82.9 | 122.1 |
| YOLOv9c | 48.3 | 236.6 | 102.8 | 81.7 | 31.2 |
| YOLOv5s-CS | 12.8 | 20.9 | 27.4 | 85.0 | 140.4 |
| Exp | Actual Distance (mm) | Binocular Measurement (mm) | Relative Error |
|---|---|---|---|
| 1 | 500.00 | 500.34 | 0.06% |
| 2 | 600.00 | 600.54 | 0.08% |
| 3 | 700.00 | 700.57 | 0.08% |
| 4 | 800.00 | 801.41 | 0.18% |
| 5 | 900.00 | 903.02 | 0.33% |
| 6 | 1000.00 | 1003.21 | 0.32% |
| Exp | Target | Result |
|---|---|---|
| 1 | (0.3203, −0.0002, 0.0250) | Success |
| 2 | (0.2720, −0.1822, 0.0399) | Success |
| 3 | (0.3214, 0.0854, 0.0969) | Failure |
| 4 | (0.3177, 0.1348, 0.0836) | Success |
| 5 | (0.3461, −0.0328, 0.0536) | Success |
| 6 | (0.2914, 0.0276, 0.0718) | Failure |
| 7 | (0.3381, −0.0729, 0.0626) | Success |
| 8 | (0.3106, 0.0594, 0.1127) | Success |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhao, F.; Ling, Y.; Zhang, S. YOLO-Based 3D Perception for UVMS Grasping. J. Mar. Sci. Eng. 2024, 12, 1110. https://doi.org/10.3390/jmse12071110
Chen Y, Zhao F, Ling Y, Zhang S. YOLO-Based 3D Perception for UVMS Grasping. Journal of Marine Science and Engineering. 2024; 12(7):1110. https://doi.org/10.3390/jmse12071110
Chicago/Turabian StyleChen, Yanhu, Fuqiang Zhao, Yucheng Ling, and Suohang Zhang. 2024. "YOLO-Based 3D Perception for UVMS Grasping" Journal of Marine Science and Engineering 12, no. 7: 1110. https://doi.org/10.3390/jmse12071110
APA StyleChen, Y., Zhao, F., Ling, Y., & Zhang, S. (2024). YOLO-Based 3D Perception for UVMS Grasping. Journal of Marine Science and Engineering, 12(7), 1110. https://doi.org/10.3390/jmse12071110