
Hydrodynamic Characteristics Analysis and Mooring System Optimization of an Innovative Deep-Sea Aquaculture Platform



Abstract
1. Introduction
2. Methodology for Hydrodynamic Analysis and Mooring System Optimization
2.1. Framework and Process of the Methodology
2.2. Simulation Method of the Main Structure
2.3. Simulation Method of the Netting System
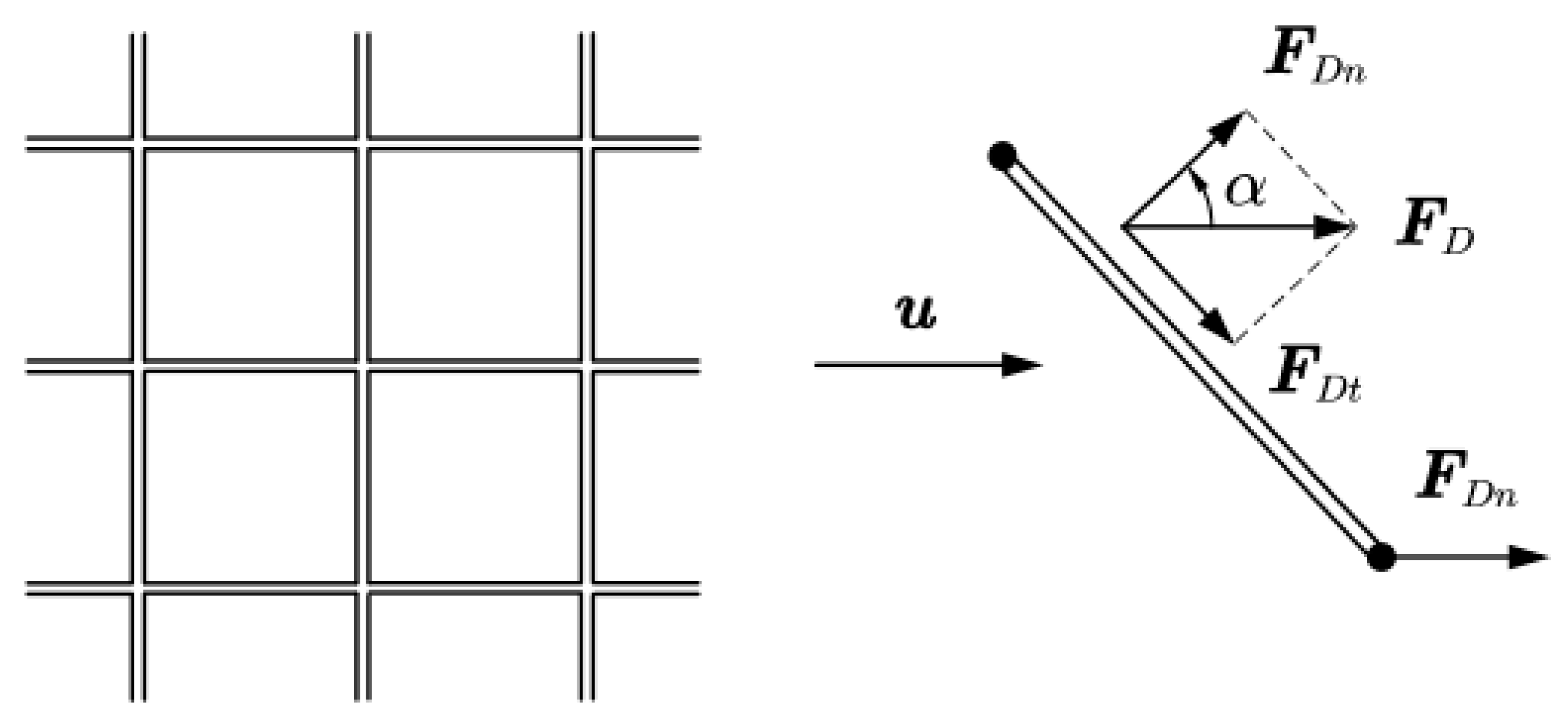
2.3.1. Calculation Method of the Force on the Netting
2.3.2. Equivalent Model of the Netting
- (1)
- The mass of the netting after equivalence must be equal to the mass of the actual netting;
- (2)
- The area covered by the netting after equivalence must be equal to the area covered by the actual netting;
- (3)
- The projected area of the netting along the direction of flow after equivalence must be equal to that of the actual netting.
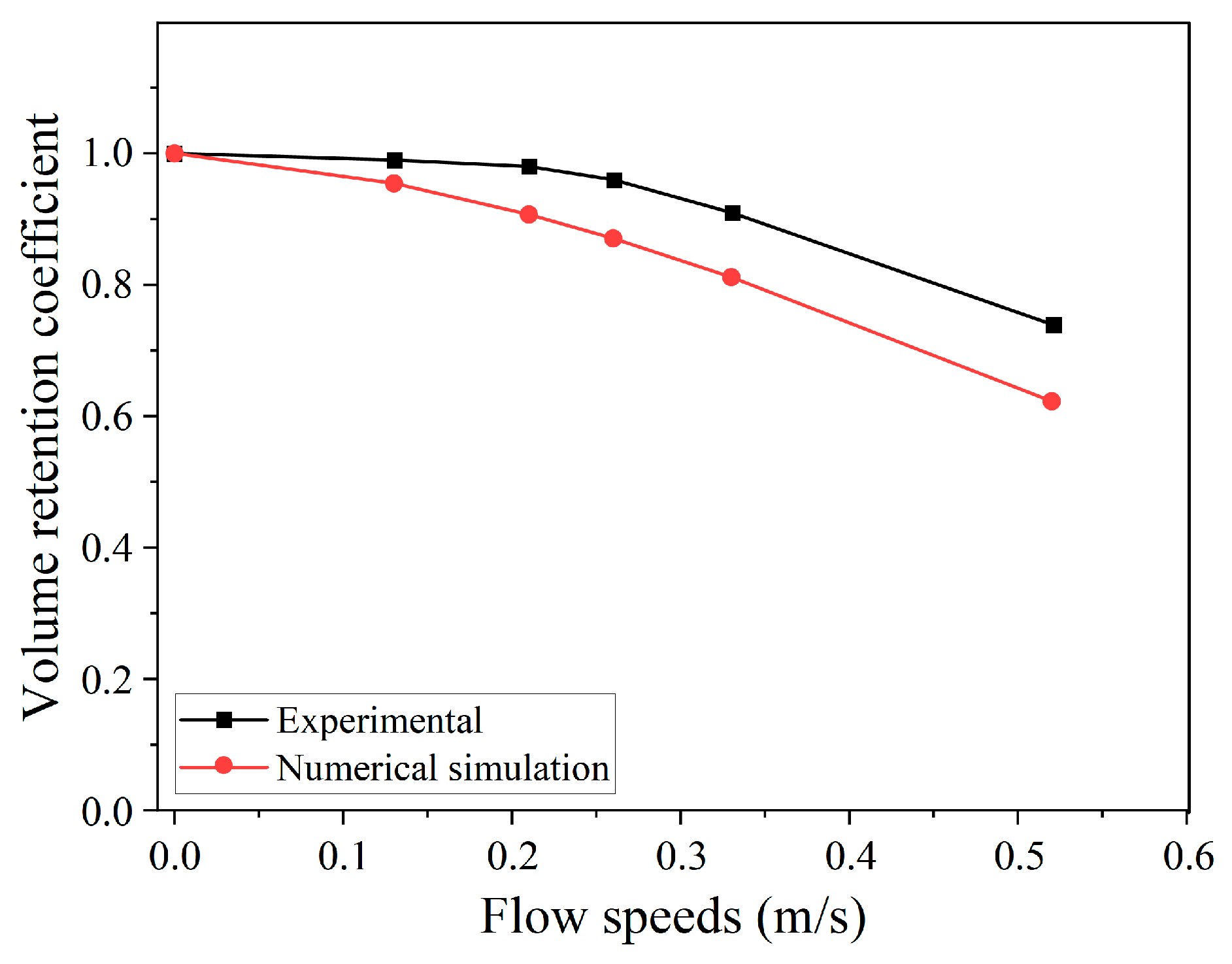
2.3.3. Verification of the Numerical Model
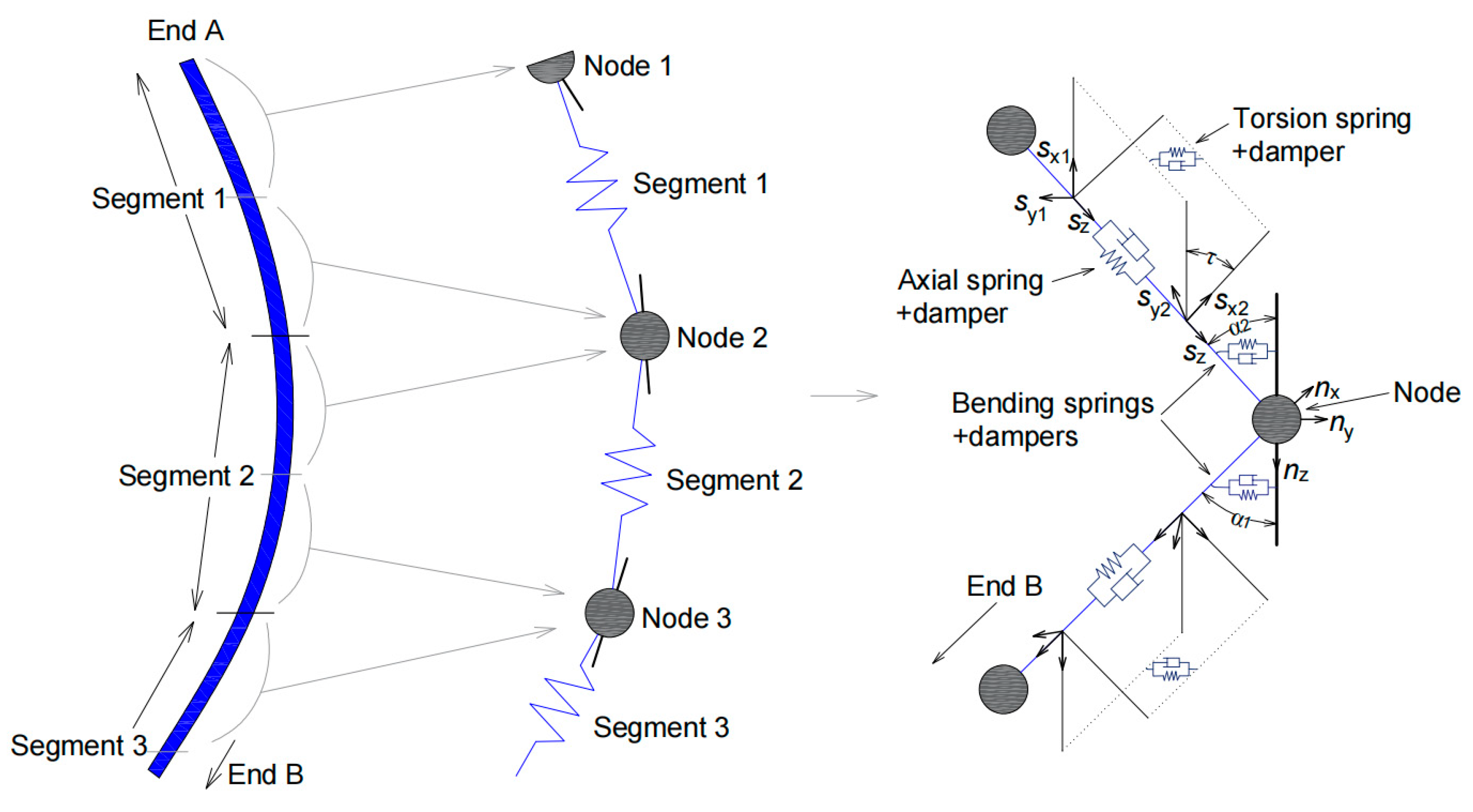
2.4. Modeling Method of the Mooring System
2.5. Time-Domain Motion Equation
3. Case Study
3.1. Description of the Platform
3.1.1. Design Concept and Main Parameters of the Platform
3.1.2. Hydrodynamic Model of the Main Structure
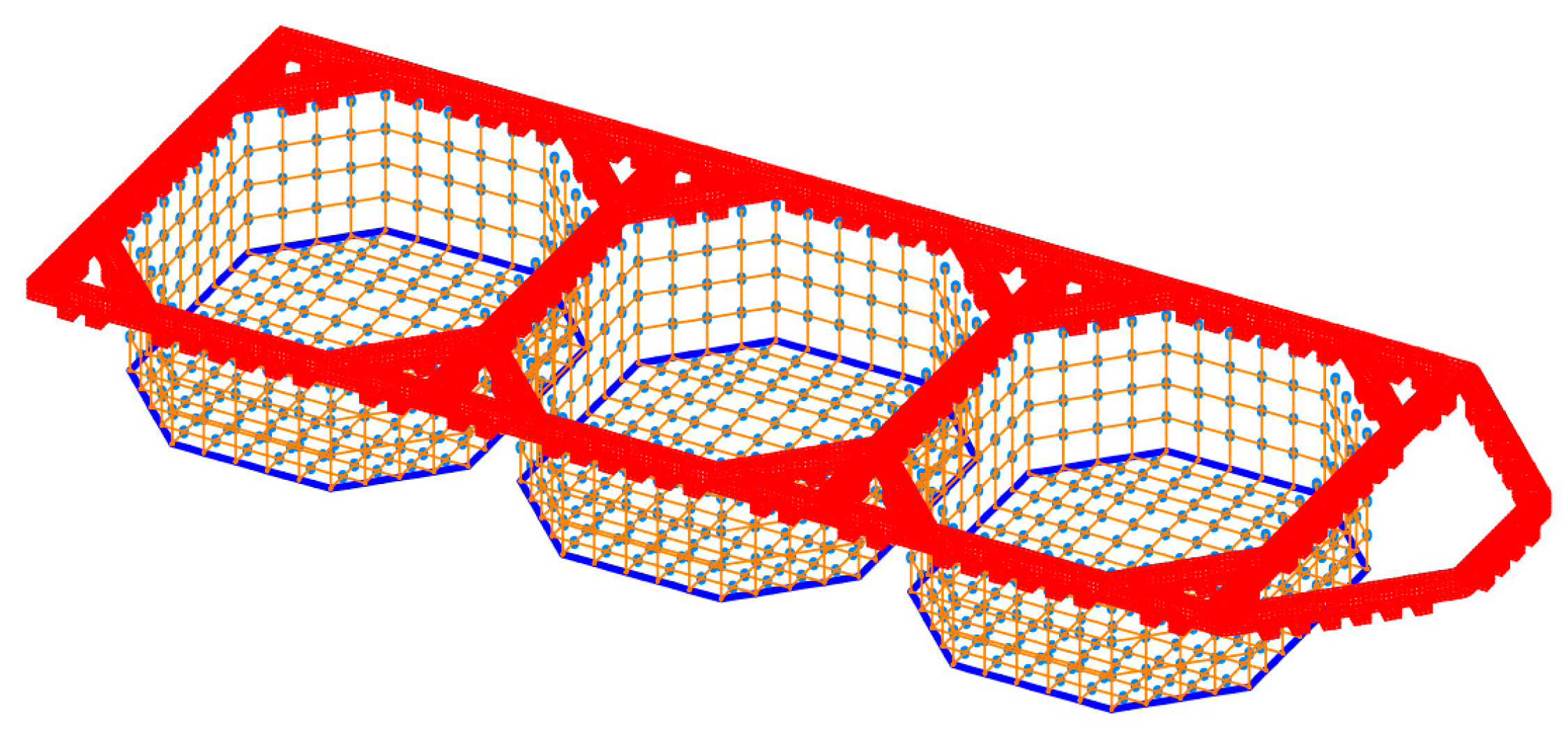
3.1.3. Numerical Model of the Platform
3.2. Mooring System Design and Optimization Scheme
3.2.1. Design Criteria
- (1)
- Given the importance of the safety of the platform structure and the stability of its internal environment, the displacement of the platform must be restricted to a reasonable range.
- (2)
- The mooring lines must be sufficiently strong. Taking safety factors into account, the maximum tension in the mooring lines must not exceed the allowable stress. While a comprehensive mooring design typically considers fatigue damage, this paper specifically focuses on limit states.
- (3)
- The mooring lines should be long enough to ensure that even when the platform reaches its maximum offset position, a portion of the mooring lines still remains in contact with the seabed, ensuring that the anchor structures only bear horizontal forces and not vertical forces.
3.2.2. Design Basis
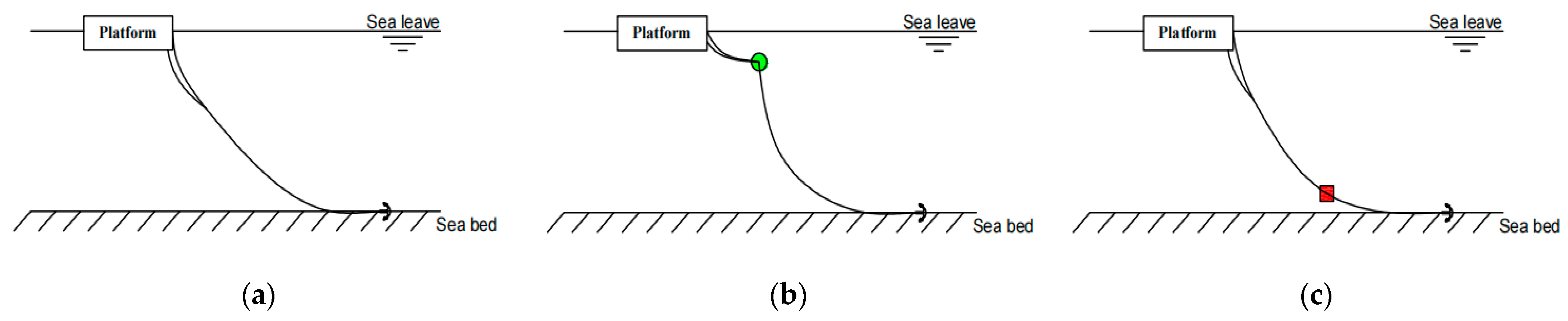
3.2.3. Mooring System Optimization Scheme
3.3. Environmental Conditions
4. Results and Discussion
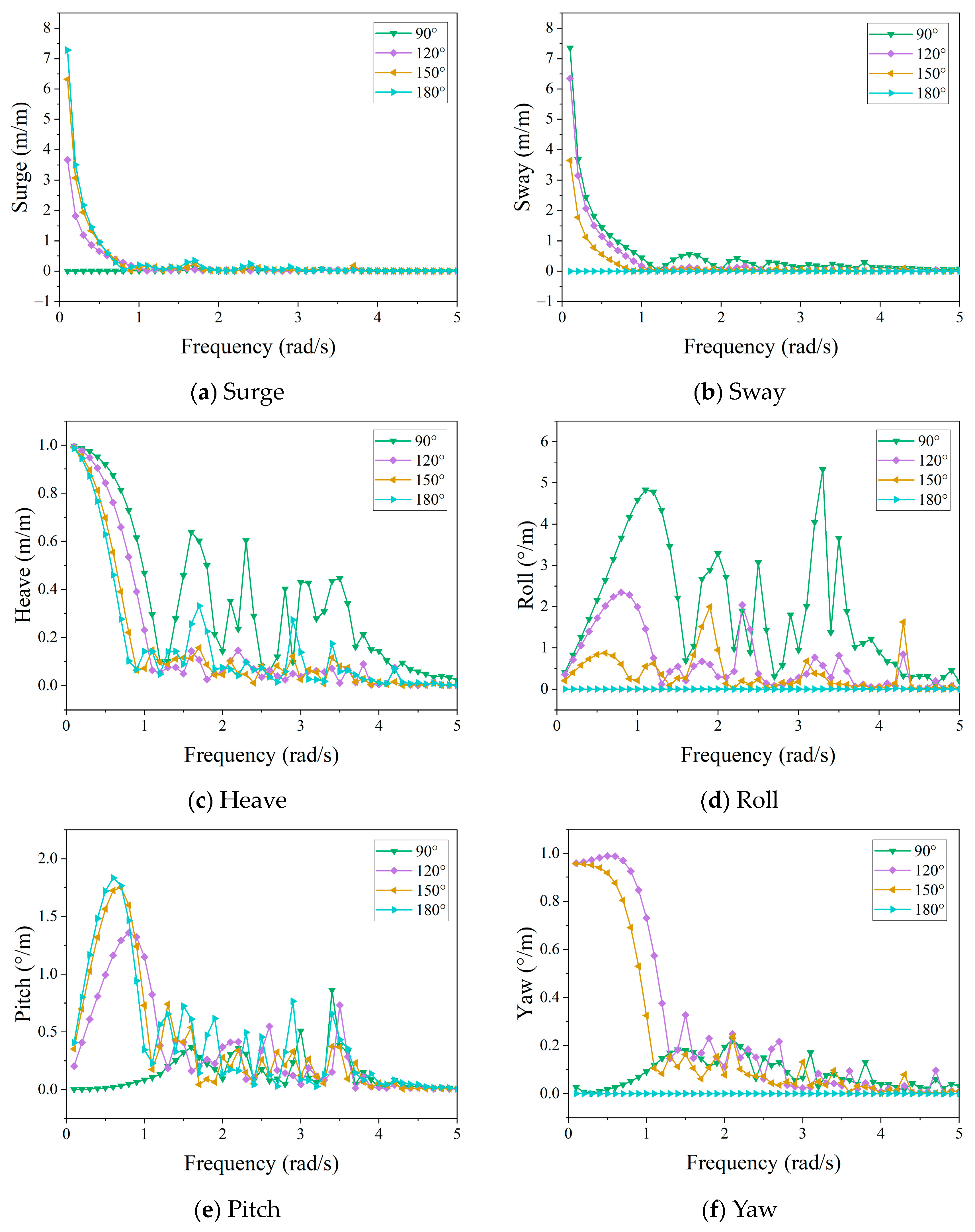
4.1. Response Amplitude Operators of the Main Structure
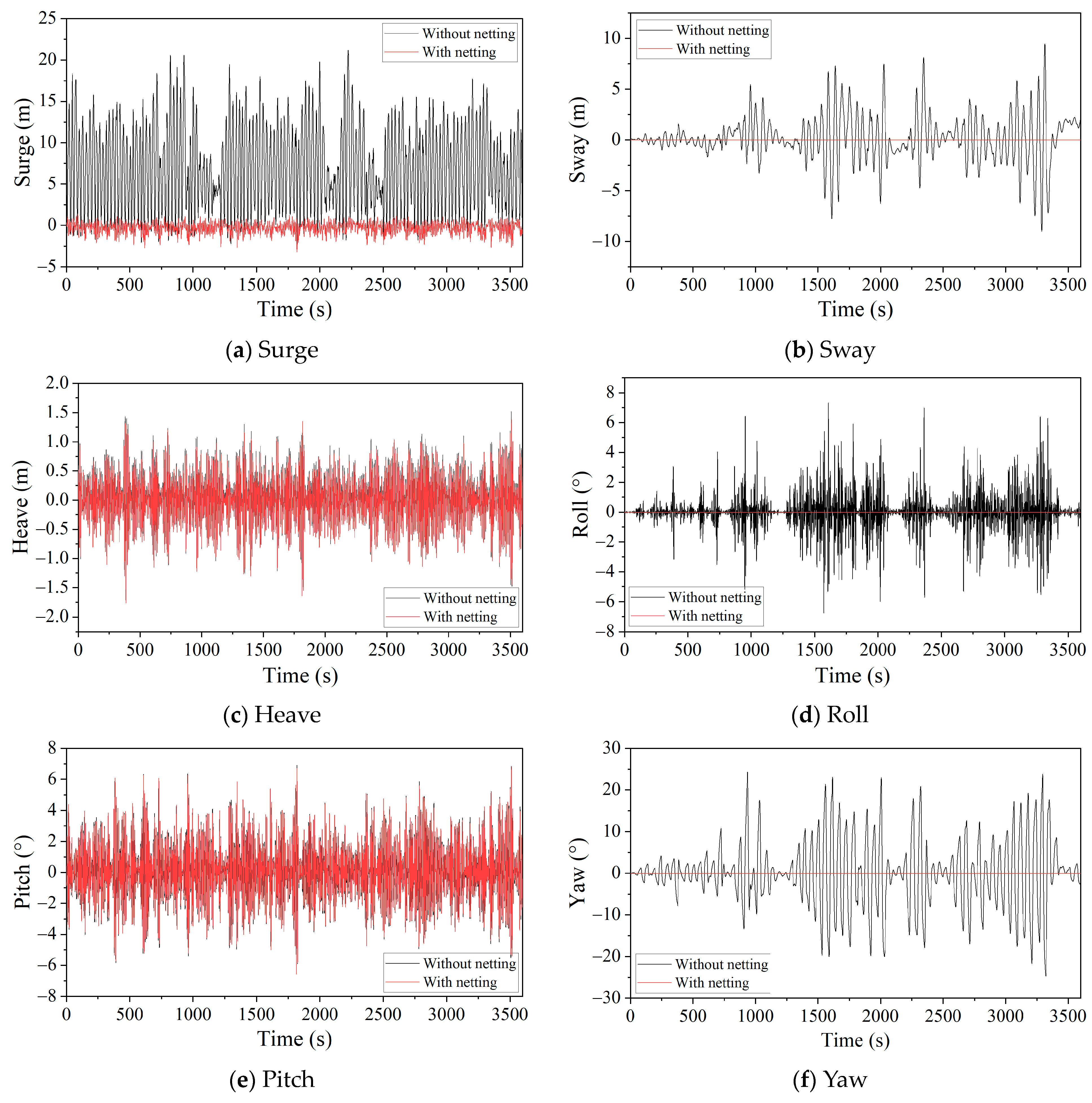
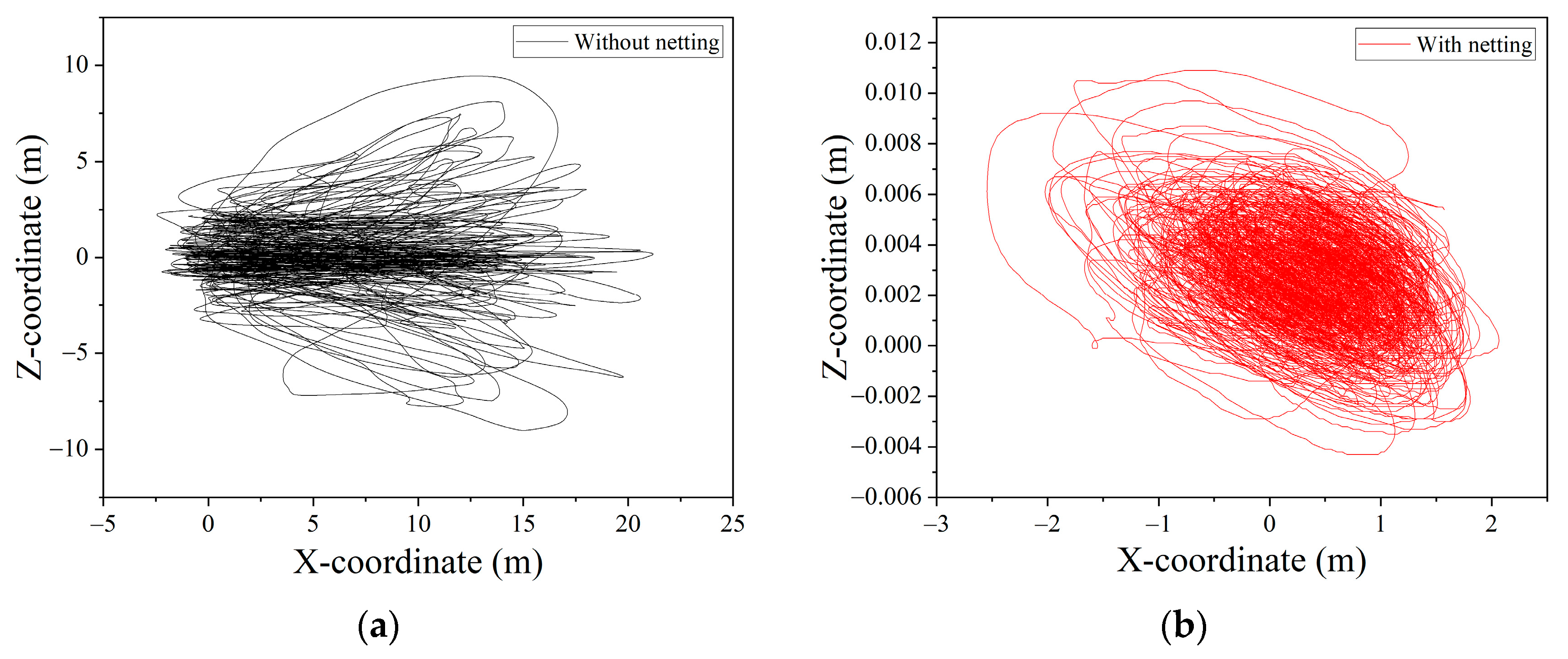
4.2. Influence of Netting System on Hydrodynamic Characteristics of the Platform
4.3. Static Analysis of the Optimization Scheme
4.3.1. Pre-Tension of the Mooring Line
4.3.2. Offset Characteristics of the Mooring System
4.4. Dynamic Analysis of the Optimization Scheme
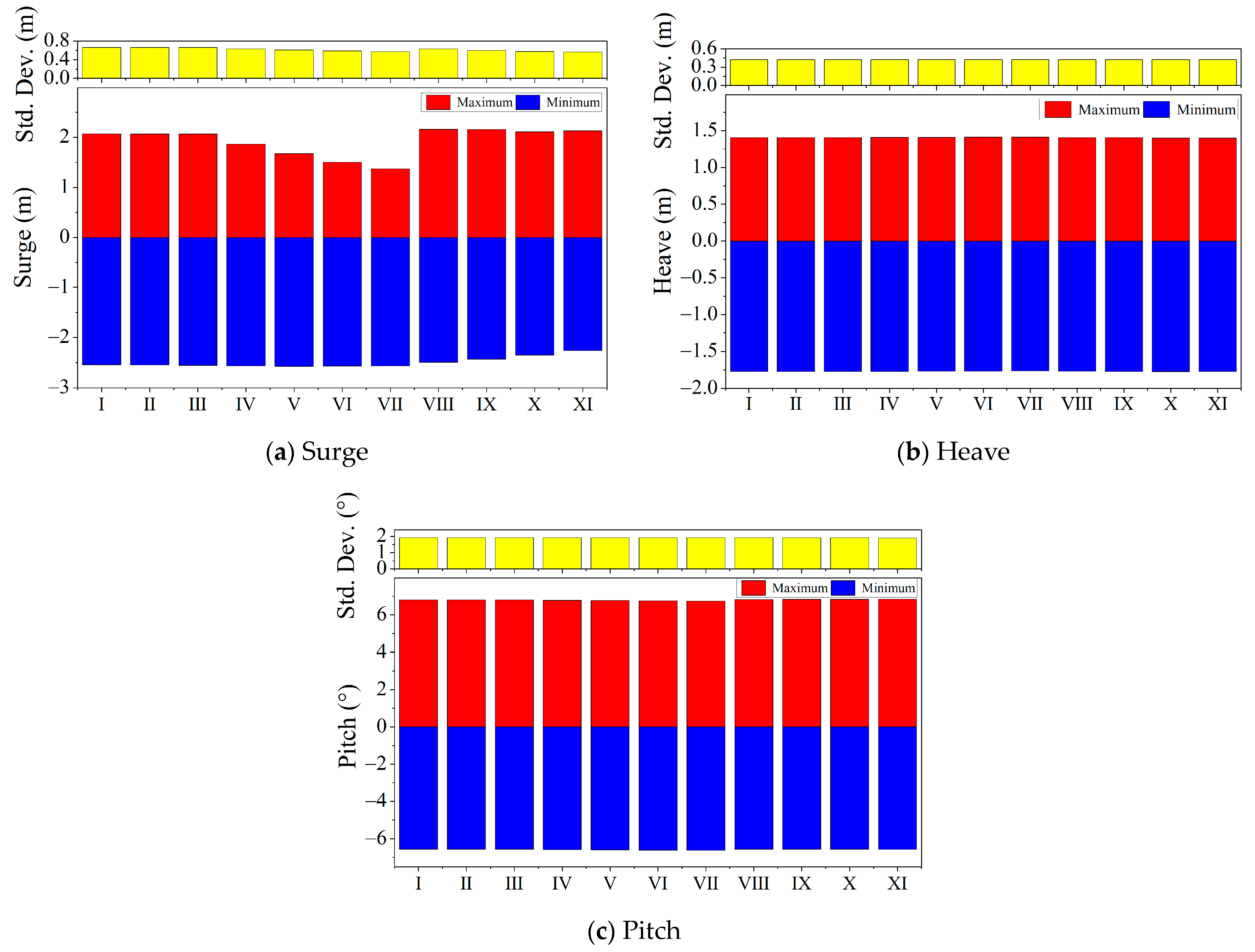
4.4.1. Motion Response of the Platform
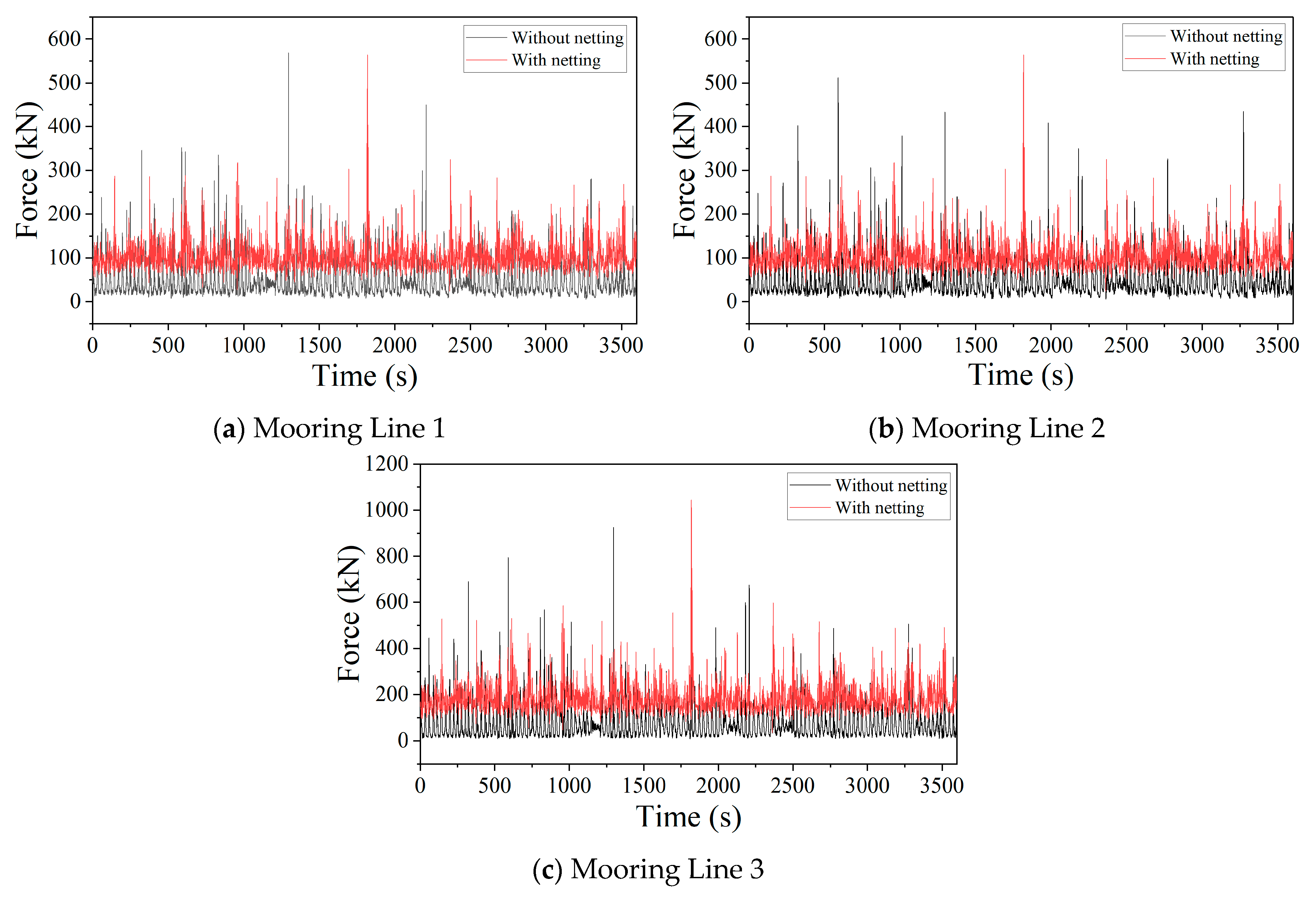
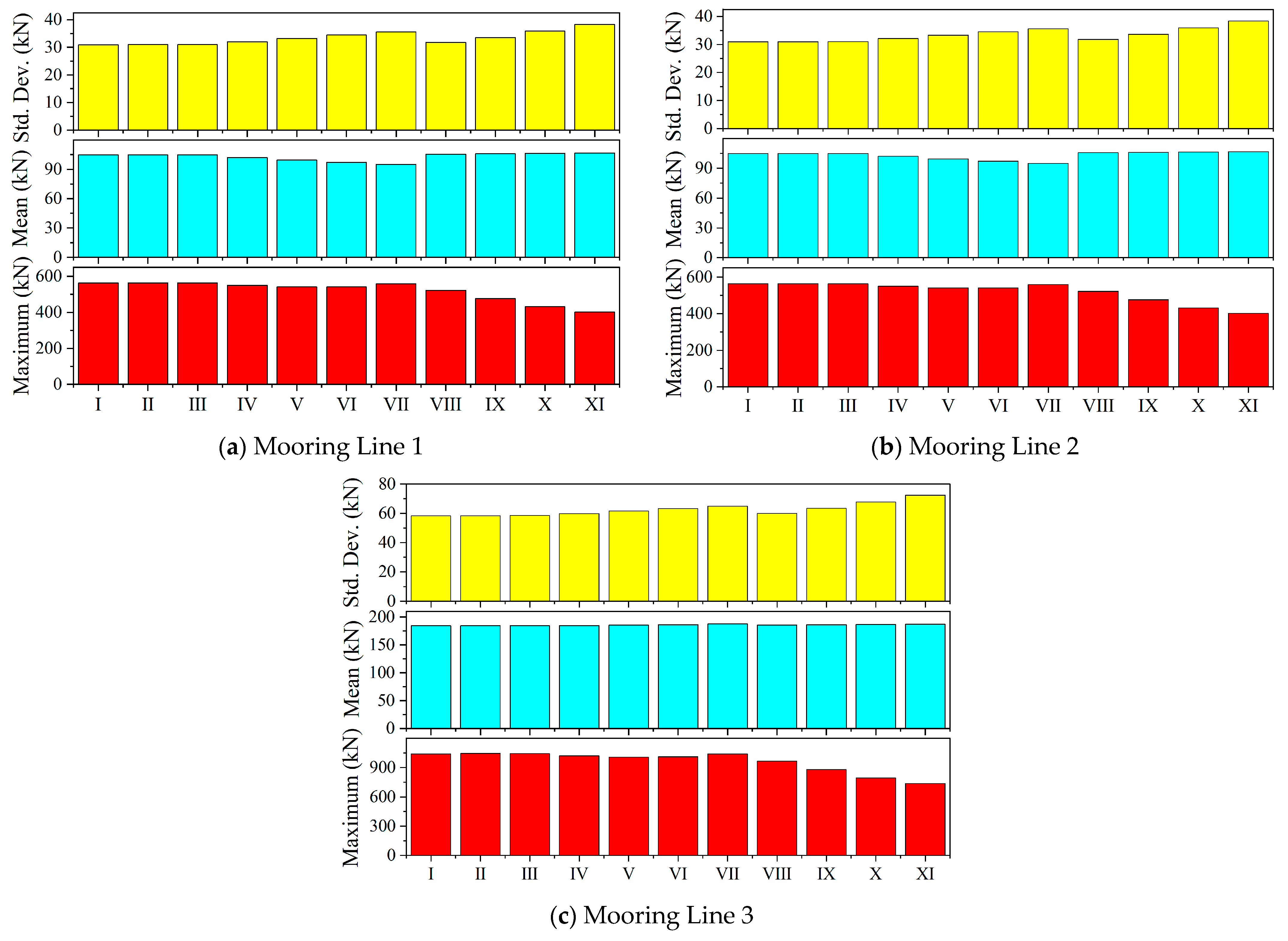
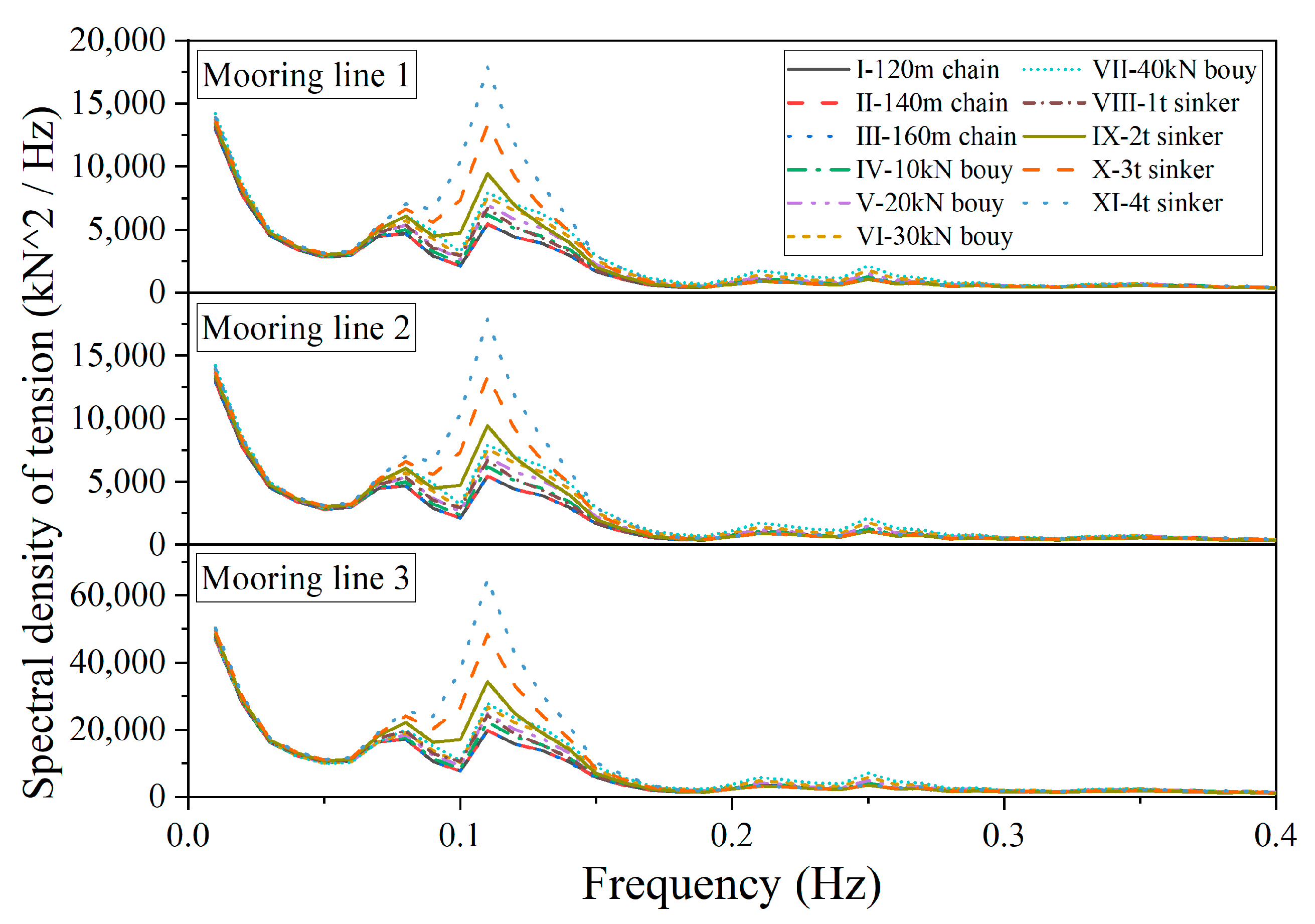
4.4.2. Mooring Line Tension
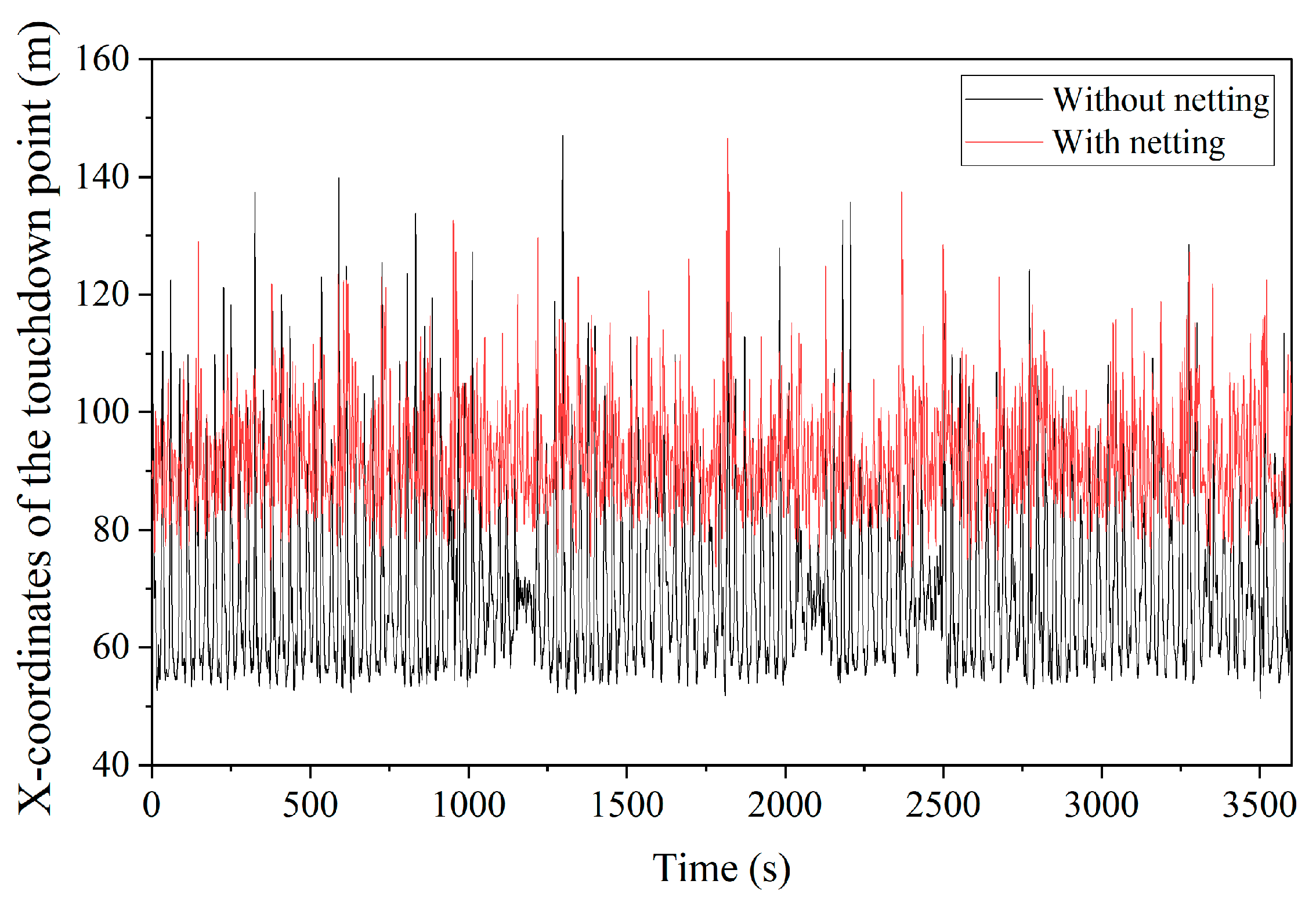
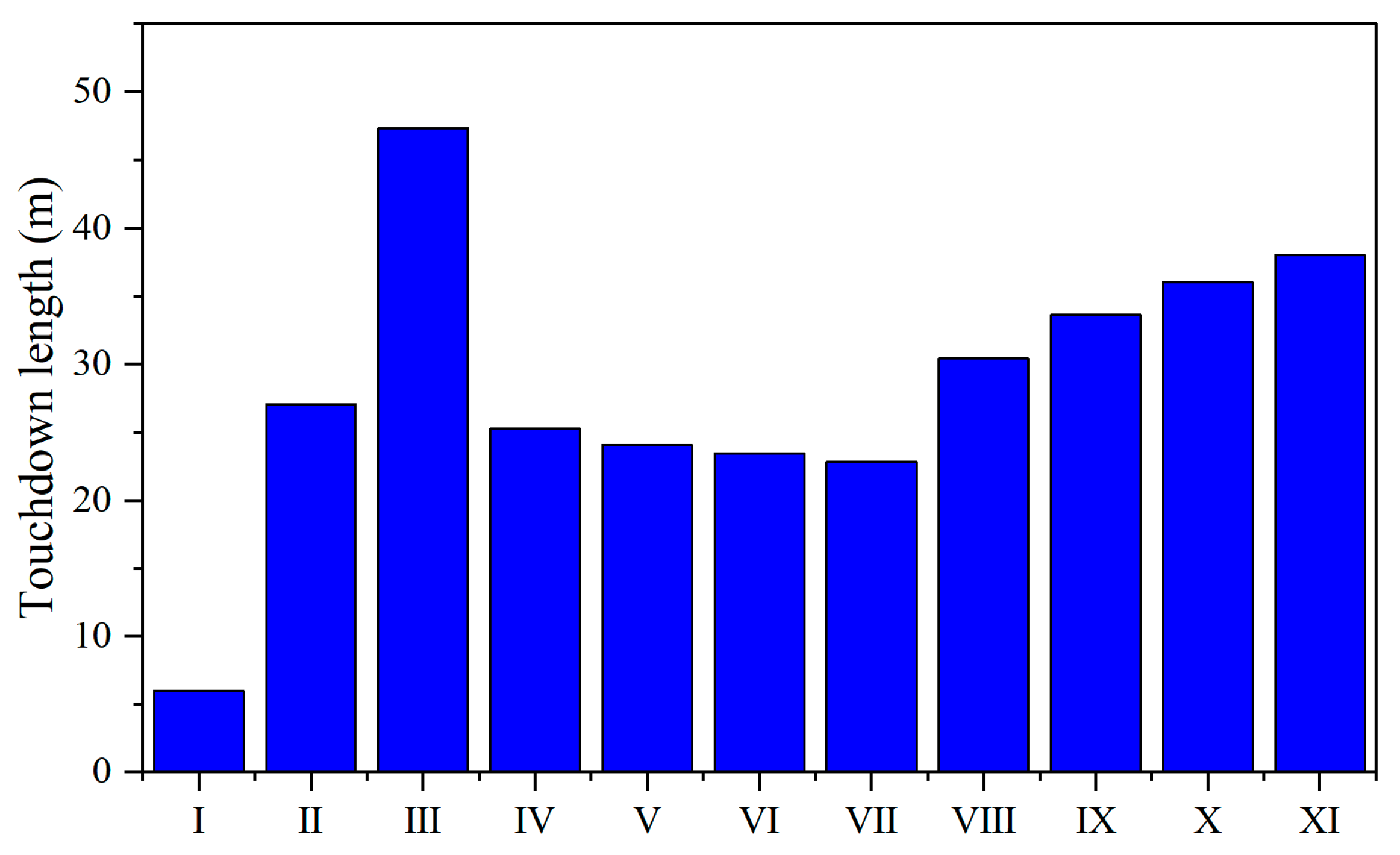
4.4.3. Minimum Touchdown Length of the Mooring Line
5. Conclusions
- (1)
- The motion response of the platform is significantly affected by the damping of the netting system. Compared to numerical models without netting, the addition of the netting substantially reduces fish-tailing movements of the platform, making the motion responses in sway, roll, and yaw negligible. As the overall resistance of the platform increases, providing higher recovery forces, the effective tension in the mooring lines also increases.
- (2)
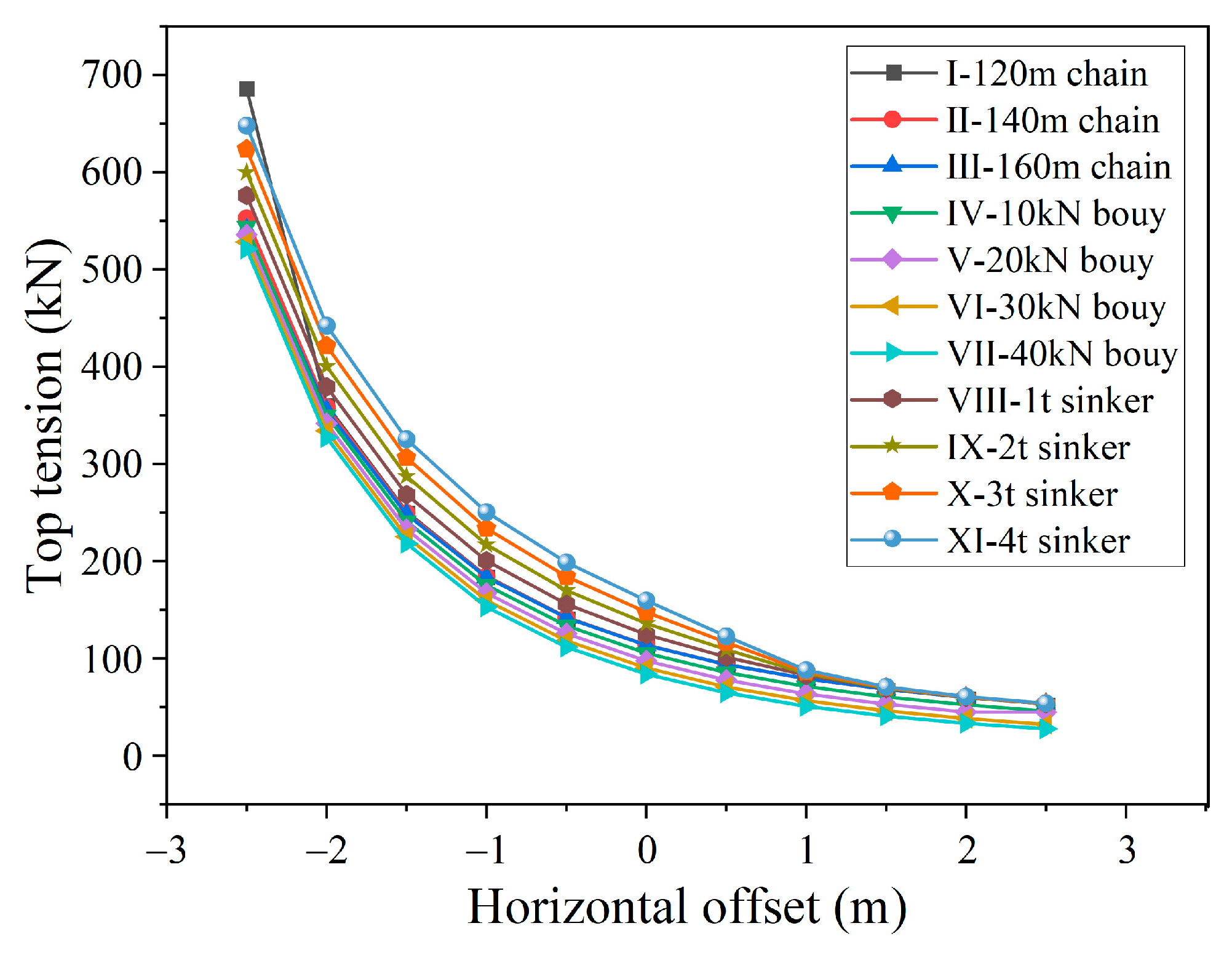
- The motion response of the platform and the tension in the mooring lines are not significantly affected by the length of the mooring lines. Adding appropriate buoys can reduce the motion response of the platform and the load on the mooring lines, but if the buoys are too large, their dynamic response may increase the environmental loads on the mooring lines. Adding sinkers to the mooring lines increases the damping of the system, thereby reducing the extreme values of the platform motion response and mooring line tension. Additionally, due to the gravitational effect of the sinkers, the minimum touchdown length of the mooring lines increases with the increase in the mass of the sinkers.
- (3)
- Considering the motion response of the platform, the tension in the mooring lines, and the minimum touchdown length of the mooring lines, adding sinkers to the mooring lines of the innovative deep-sea aquaculture platform system can effectively improve the overall stability and safety of the platform. When the weight of the sinkers is 4 tons, compared to the configuration without sinkers, the maximum tensions in Mooring Lines 1 and 3 decrease by 28.81% and 29.44%, respectively, while the minimum touchdown length increases by 40.51%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moe, H.; Fredheim, A.; Hopperstad, O.S. Structural analysis of aquaculture net cages in current. J. Fluids Struct. 2010, 26, 503–516. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M.H. Hydrodynamic response of a cage system under waves and currents using a morison-force model. Ocean Eng. 2017, 141, 283–294. [Google Scholar] [CrossRef]
- Huang, X.; Guo, G.; Tao, Q.; Hu, Y.; Liu, H.; Wang, S.; Hao, S. Dynamic deformation of the floating collar of a net cage under the combined effect of waves and current. Aquac. Eng. 2018, 83, 47–56. [Google Scholar] [CrossRef]
- Zhao, Y.; Bai, X.; Dong, G.; Bi, C. Deformation and stress distribution of floating collar of net cage in steady current. Ships Offshore Struct. 2019, 14, 371–383. [Google Scholar] [CrossRef]
- Chu, Y.; Wang, C.M.; Park, J.C.; Lader, P.F. Review of cage and containment tank designs for offshore fish farming. Aquaculture 2020, 519, 734928. [Google Scholar] [CrossRef]
- Fan, Z.; Liang, Y.; Zhao, Y. Review of the research on the hydrodynamics of fishing cage nets. Ocean Eng. 2023, 276, 114192. [Google Scholar] [CrossRef]
- Zhao, Y.; Guan, C.; Bi, C.; Liu, H.; Cui, Y. Experimental investigations on hydrodynamic responses of a semi-submersible offshore fish farm in waves. J. Mar. Sci. Eng. 2019, 7, 238. [Google Scholar] [CrossRef]
- Jin, J.; Su, B.; Dou, R.; Luan, C.; Li, L.; Nygaard, I.; Fonseca, N.; Gao, Z. Numerical modelling of hydrodynamic responses of ocean farm 1 in waves and current and validation against model test measurements. Mar. Struct. 2021, 78, 103017. [Google Scholar] [CrossRef]
- Martin, T.; Tsarau, A.; Bihs, H. A numerical framework for modelling the dynamics of open ocean aquaculture structures in viscous fluids. Appl. Ocean Res. 2021, 106, 102410. [Google Scholar] [CrossRef]
- Miao, Y.; Ding, J.; Tian, C.; Chen, X.; Fan, Y. Experimental and numerical study of a semi-submersible offshore fish farm under waves. Ocean Eng. 2021, 225, 108794. [Google Scholar] [CrossRef]
- Yu, S.; Qin, H.; Li, P.; Xu, Z. Nonlinear vertical accelerations and mooring loads of a semi-submersible offshore fish farm under extreme conditions. Aquac. Eng. 2021, 95, 102193. [Google Scholar] [CrossRef]
- Liu, H.; Liu, Y. Numerical investigation on the dynamic response of the semi-submersible aquaculture platform in regular waves. Ocean Eng. 2024, 294, 116718. [Google Scholar] [CrossRef]
- Colbourne, D.B.; Allen, J.H. Observations on motions and loads in aquaculture cages from full scale and model scale measurements. Aquac. Eng. 2001, 24, 129–148. [Google Scholar] [CrossRef]
- Xu, T.; Dong, G.; Zhao, Y.; Li, Y.; Gui, F. Numerical investigation of the hydrodynamic behaviors of multiple net cages in waves. Aquac. Eng. 2012, 48, 6–18. [Google Scholar] [CrossRef]
- Li, L.; Jiang, Z.; Ong, M.C.; Hu, W. Design optimization of mooring system: An application to a vessel-shaped offshore fish farm. Eng. Struct. 2019, 197, 109363. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.; Lee, C. Design evaluation of a fish cage mooring system with different bridle line connections using model experiments and simulations. Aquac. Eng. 2021, 94, 102177. [Google Scholar] [CrossRef]
- Yu, J.; Cheng, X.; Fan, Y.; Ni, X.; Chen, Y.; Ye, Y. Mooring design of offshore aquaculture platform and its dynamic performance. Ocean Eng. 2023, 275, 114146. [Google Scholar] [CrossRef]
- Goudey, C.A.; Loverich, G.; Kite-Powell, H.; Costa-Pierce, B.A. Mitigating the environmental effects of mariculture through single-point moorings (spms) and drifting cages. ICES J. Mar. Sci. 2001, 58, 497–503. [Google Scholar] [CrossRef]
- Huang, C.; Tang, H.; Pan, J. Numerical modeling of a single-point mooring cage with a frontal rigid frame. IEEE J. Ocean. Eng. 2009, 34, 113–122. [Google Scholar] [CrossRef]
- Huang, C.; Pan, J. Mooring line fatigue: A risk analysis for an spm cage system. Aquac. Eng. 2010, 42, 8–16. [Google Scholar] [CrossRef]
- Decew, J.; Tsukrov, I.; Risso, A.; Swift, M.R.; Celikkol, B. Modeling of dynamic behavior of a single-point moored submersible fish cage under currents. Aquac. Eng. 2010, 43, 38–45. [Google Scholar] [CrossRef]
- Shainee, M.; Decew, J.; Leira, B.J.; Ellingsen, H.; Fredheim, A. Numerical simulation of a self-submersible spm cage system in regular waves with following currents. Aquac. Eng. 2013, 54, 29–37. [Google Scholar] [CrossRef]
- Shainee, M.; Leira, B.J.; Ellingsen, H.; Fredheim, A. Investigation of a self-submersible spm cage system in random waves. Aquac. Eng. 2014, 58, 35–44. [Google Scholar] [CrossRef]
- Xu, T.; Dong, G.; Li, Y.; Guo, W. Numerical study of a self-submersible single-point mooring gravity cage in combined wave-current flow. Appl. Ocean Res. 2014, 48, 66–79. [Google Scholar] [CrossRef]
- Huang, X.; Liu, H.; Hu, Y.; Yuan, T.; Tao, Q.; Wang, S.; Liu, Z. Hydrodynamic performance of a semi-submersible offshore fish farm with a single point mooring system in pure waves and current. Aquac. Eng. 2020, 90, 102075. [Google Scholar] [CrossRef]
- Ma, C.; Zhao, Y.; Bi, C. Numerical study on hydrodynamic responses of a single-point moored vessel-shaped floating aquaculture platform in waves. Aquac. Eng. 2022, 96, 102216. [Google Scholar] [CrossRef]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Sarpkaya, T. Wave Forces on Offshore Structures; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- China Classification Society. Rules for Classification of Mobile Offshore Units; China Classification Society: Beijing, China, 2020. [Google Scholar]
- Wang, C.M.; Ma, M.; Chu, Y.; Jeng, D.; Zhang, H. Developments in modeling techniques for reliability design of aquaculture cages: A review. J. Mar. Sci. Eng. 2024, 12, 103. [Google Scholar] [CrossRef]
- Lader, P.; Jensen, A.; Sveen, J.K.; Fredheim, A.; Enerhaug, B.; Fredriksson, D. Experimental investigation of wave forces on net structures. Appl. Ocean Res. 2007, 29, 112–127. [Google Scholar] [CrossRef]
- Choo, Y.I.; Casarella, M.J. Hydrodynamic resistance of towed cables. Hydronaut 1971, 5, 126–131. [Google Scholar]
- Lader, P.F.; Enerhaug, B. Experimental investigation of forces and geometry of a net cage in uniform. IEEE J. Ocean. Eng. 2005, 30, 79–84. [Google Scholar] [CrossRef]
- Orcina Ltd. Orcaflex Manual, Version 11.1a; Orcina Ltd.: Cumbria, UK, 2021. [Google Scholar]
- DNV GL. Dnvgl-os-e301 Position Mooring; DNV GL: Oslo, Norway, 2015. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Experimental Model | Numerical Model | |
|---|---|---|---|
| Depth (m) | 2.7 | 2.7 | |
| Netting | Diameter (m) | 1.435 | 1.435 |
| Height (m) | 1.44 | 1.44 | |
| Horizontal netting lines | Diameter (mm) | 1.8 | 13.5 |
| Length (mm) | 16 | 14.088 | |
| Density (kg/m3) | 1130 | 1039.0 | |
| Young’s modulus (MPa) | 350 | 46.67 | |
| Vertical netting lines | Diameter (mm) | 1.8 | 15.85 |
| Length (mm) | 16 | 12.0 | |
| Density (kg/m3) | 1130 | 1036.92 | |
| Young’s modulus (MPa) | 350 | 39.75 |
| Parameters | Value |
|---|---|
| Length (m) | 77.5 |
| Breadth (m) | 27.5 |
| Depth (m) | 2.3 |
| Design draught (m) | 1.07 |
| Weight (t) | 328.084 |
| Center of gravity (m) | (−1.085, 0, 1.238) |
| Roll inertia (kg·m2) | 3.720 × 107 |
| Pitch inertia (kg·m2) | 1.759 × 108 |
| Yaw inertia (kg·m2) | 2.114 × 108 |
| Component | Parameters | Value |
|---|---|---|
| Netting system | Quantity | 3 |
| Length (m) | 22.8 | |
| Width (m) | 19.2 | |
| Height (m) | 8 | |
| Mesh size (mm) | 40 | |
| Twine diameter (mm) | 2.1 | |
| Density (kg/m3) | 953 | |
| Bottom ring | Weight (t) | 7 |
| Mooring Line | Material | Diameter (mm) | Dry Weight (kg/m) | Wet Weight (kg/m) | Axial Stiffness (kN) | Breaking Tension (kN) |
|---|---|---|---|---|---|---|
| 1 | Stud link | 70 | 107.3 | 93.2 | 4.95 × 105 | 3687.9 |
| 2 | Stud link | 70 | 107.3 | 93.2 | 4.95 × 105 | 3687.9 |
| 3 | Stud link | 100 | 219.0 | 190.2 | 1.01 × 106 | 7056.0 |
| Model | Length (m) | Buoy (kN) | Sinker (t) | ||
|---|---|---|---|---|---|
| Entirety | Mooring Line 1 and 2 | Mooring Line 3 | |||
| Without nets | 140 | 12 | 128 | - | - |
| I | 120 | 12 | 108 | - | - |
| II | 140 | 12 | 128 | - | - |
| III | 160 | 12 | 148 | - | - |
| IV | 140 | 12 | 128 | 10 | - |
| V | 140 | 12 | 128 | 20 | - |
| VI | 140 | 12 | 128 | 30 | - |
| VII | 140 | 12 | 128 | 40 | - |
| VIII | 140 | 12 | 128 | - | 1 |
| IX | 140 | 12 | 128 | - | 2 |
| X | 140 | 12 | 128 | - | 3 |
| XI | 140 | 12 | 128 | - | 4 |
| Model | Component | X-Coordinate (m) | Z-Coordinate (m) |
|---|---|---|---|
| IV~VII | Buoy | 47.95 | −5.94 |
| VIII~XI | Sinker | 81.58 | −18.32 |
| Environment | Parameters | Value |
|---|---|---|
| Depth (m) | 20 | |
| Wave | Spectrum | JONSWAP |
| Wave spectrum factor | 3.3 | |
| Significant wave height (m) | 5.0 | |
| Peak wave period (s) | 9.8 | |
| Direction (°) | 180 | |
| Current | Speed (m/s) | 0.8 |
| Direction (°) | 180 |
| Model | Statistical Results | Surge (m) | Sway (m) | Heave (m) | Roll (°) | Pitch (°) | Yaw (°) |
|---|---|---|---|---|---|---|---|
| Without netting | Amplitude | 11.820 | 9.233 | 1.635 | 7.033 | 6.685 | 24.523 |
| Std. Dev. | 4.903 | 2.199 | 0.429 | 1.226 | 1.916 | 7.874 | |
| With netting | Amplitude | 2.306 | 0.008 | 1.590 | 0.004 | 6.686 | 0.005 |
| Std. Dev. | 0.660 | 0.002 | 0.421 | 0.001 | 1.919 | 0.001 |
| Model | Statistical Results | Mooring Line 1 | Mooring Line 2 | Mooring Line 3 |
|---|---|---|---|---|
| Without netting | Maximum (kN) | 568.60 | 511.66 | 924.84 |
| Mean (kN) | 48.93 | 48.95 | 74.97 | |
| Std. Dev. (kN) | 41.96 | 41.83 | 73.41 | |
| With netting | Maximum (kN) | 563.94 | 564.07 | 1044.87 |
| Mean (kN) | 104.86 | 104.88 | 184.14 | |
| Std. Dev. (kN) | 30.95 | 30.97 | 58.31 |
| Model | I | II | III | IV | V | VI | VII | VIII | IX | X | XI |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pre-tension (kN) | 113.8 | 113.7 | 113.6 | 105.4 | 97.5 | 90.2 | 83.9 | 124.6 | 135.9 | 147.6 | 159.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Zhen, X.; Duan, Q.; Huang, Y.; Chen, C.; Li, Y. Hydrodynamic Characteristics Analysis and Mooring System Optimization of an Innovative Deep-Sea Aquaculture Platform. J. Mar. Sci. Eng. 2024, 12, 972. https://doi.org/10.3390/jmse12060972
Zhang L, Zhen X, Duan Q, Huang Y, Chen C, Li Y. Hydrodynamic Characteristics Analysis and Mooring System Optimization of an Innovative Deep-Sea Aquaculture Platform. Journal of Marine Science and Engineering. 2024; 12(6):972. https://doi.org/10.3390/jmse12060972
Chicago/Turabian StyleZhang, Lixin, Xingwei Zhen, Qiuyang Duan, Yi Huang, Chao Chen, and Yangyang Li. 2024. "Hydrodynamic Characteristics Analysis and Mooring System Optimization of an Innovative Deep-Sea Aquaculture Platform" Journal of Marine Science and Engineering 12, no. 6: 972. https://doi.org/10.3390/jmse12060972
APA StyleZhang, L., Zhen, X., Duan, Q., Huang, Y., Chen, C., & Li, Y. (2024). Hydrodynamic Characteristics Analysis and Mooring System Optimization of an Innovative Deep-Sea Aquaculture Platform. Journal of Marine Science and Engineering, 12(6), 972. https://doi.org/10.3390/jmse12060972