
A Joint Graph-Based Approach for Simultaneous Underwater Localization and Mapping for AUV Navigation Fusing Bathymetric and Magnetic-Beacon-Observation Data

 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A novel dual-stage bathymetric data-association method is introduced. The curvature feature vectors on different scales are used to make robust transformations in the first stage, and the GICP algorithm is taken to make fine registrations in the second stage.
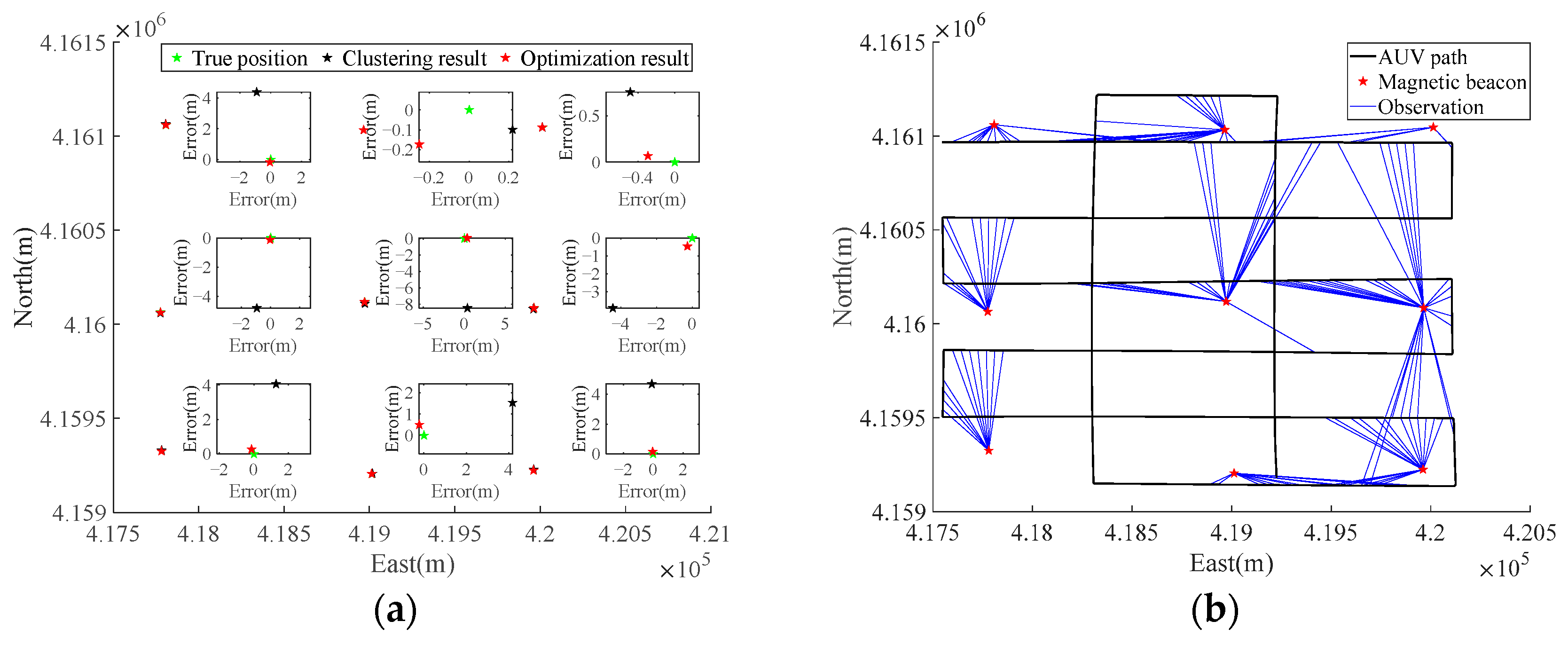
- Magnetic beacons are used to aid bathymetric data to give better SLAM performance. Also, a new approach that combines Euler-deconvolution and clustering methods is presented that can be used to locate the magnetic beacons accurately in real time.
- A false loop-closure-factor-diagnosis mechanism that considers positioning uncertainty, heading, and bathymetric consistency is designed and introduced to the novel back-end optimizer. The robustness of the SLAM system to bad data-association results is subsequently improved.
2. Dual-Stage Bathymetric Registration Using Curvature-Based Method and GICP
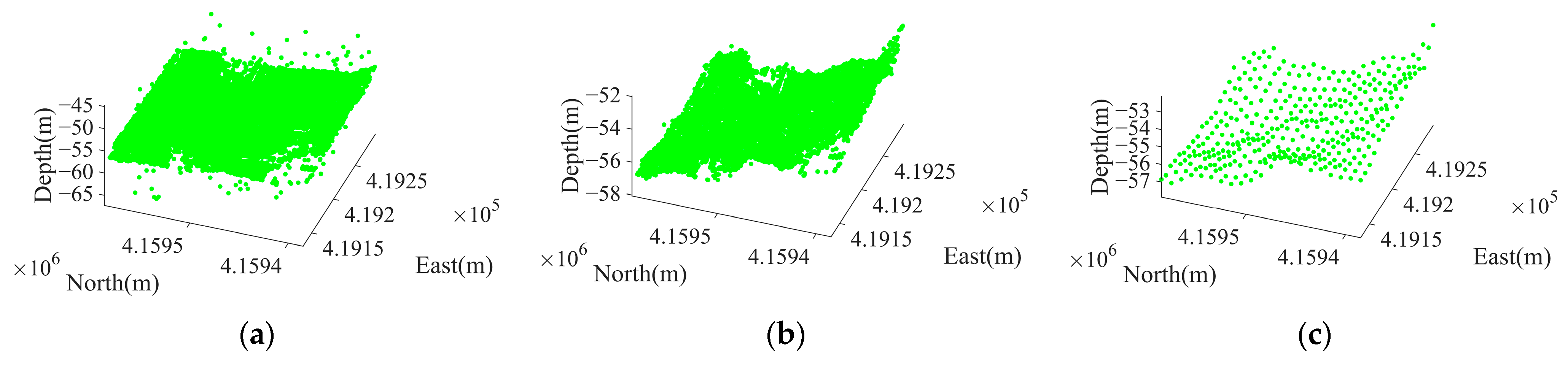
2.1. Denoising and Down-Sampling of Multibeam-Bathymetric Data
2.1.1. Denoising of Bathymetric Point Clouds
2.1.2. Bathymetric Down-Sampling Using Gaussian Process Regression
2.2. Dual-Stage Bathymetric Data Association
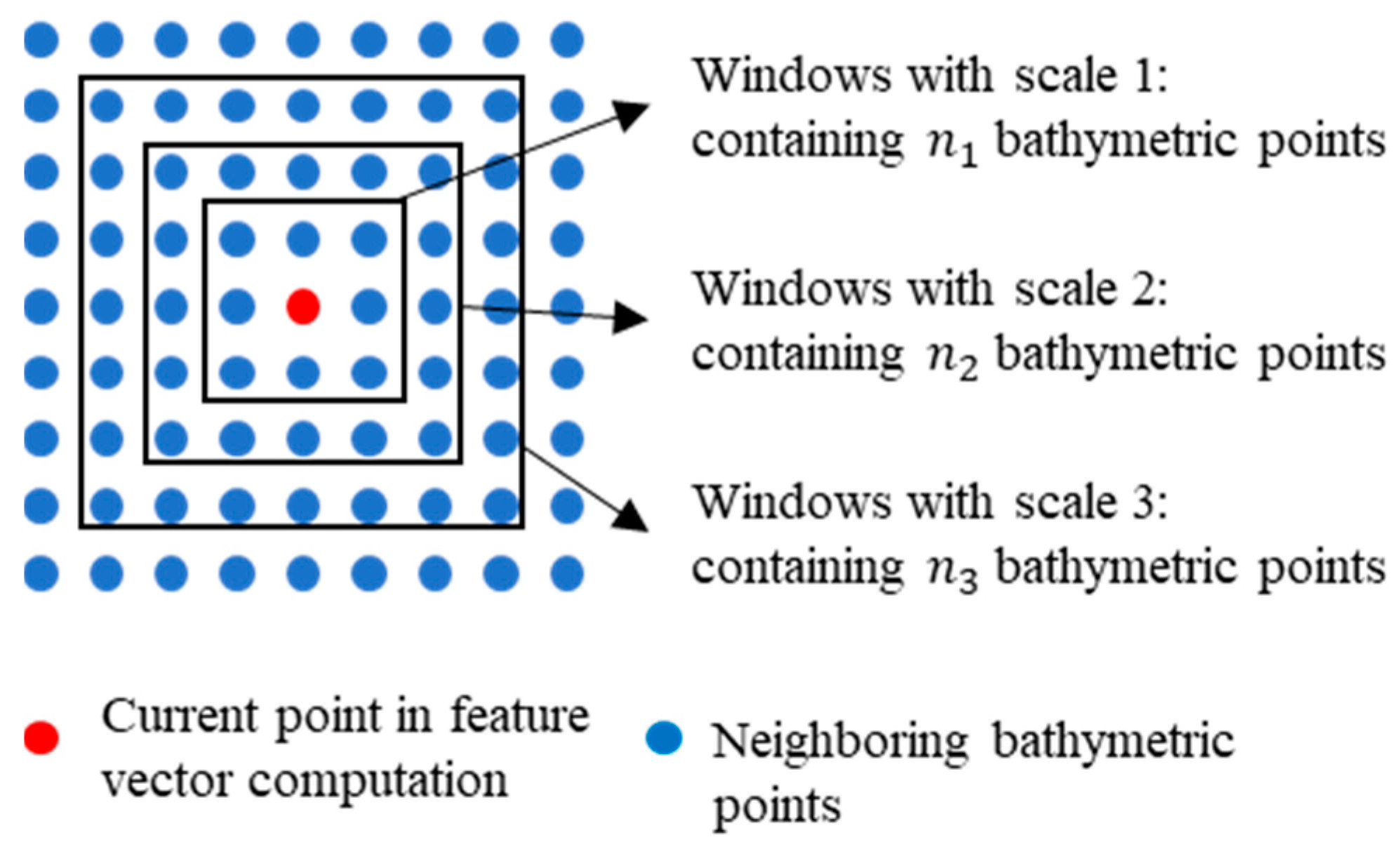
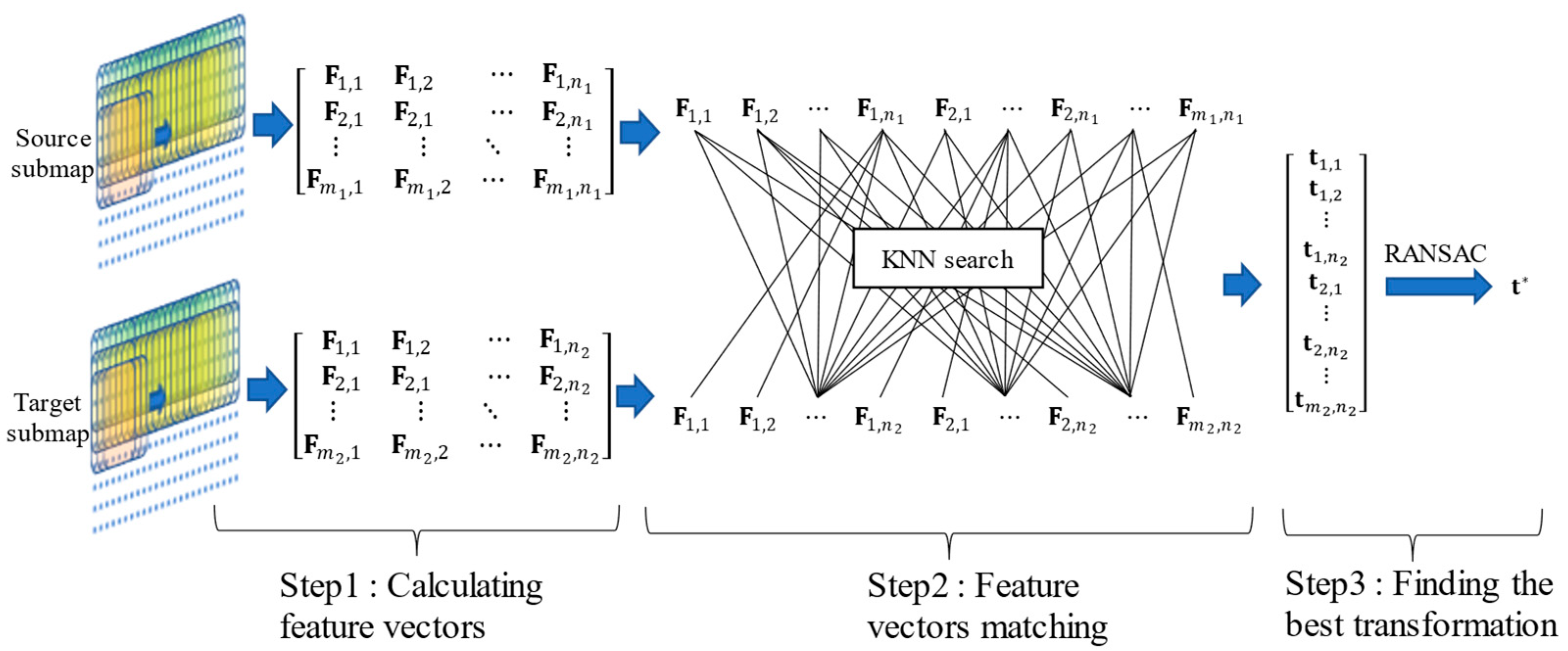
2.2.1. Coarse Registration Based on Multi-Scale Feature Vectors
- (1)
- Randomly select a translation between two matched points, between which the curvature feature vectors have the highest similarity.
- (2)
- Use to transform the source point clouds P.
- (3)
- Find the closest point pairs in between Q and P, and count the number of point pairs with bathymetric differences less than the consistency threshold .
- (4)
- Repeat steps (1)–(3) until enough iterations are performed. Then, the translation with the largest is selected as the final transformation.
2.2.2. Fine Registration Based on GICP
| Algorithm 1: Bathymetric point cloud registration |
| Input: Source bathymetric submap , target bathymetric submap Output: Transformation Step1: Denoising and down-sampling Step2: Establishing curvature feature vectors , Step3: Computing the similarity use cosine distance, and using KNN algorithm to select the best match Step4: Selecting the best transform with RANSAC Step5: Using GICP for fine registration |
3. Detection of Magnetic Beacons
| Algorithm 2: Optimization of magnetic-beacon positions |
| Input: AUV pose , Magnetometer observation Output: Magnetic beacon location =, Observation Step1: Calculating magnetic-field gradient, and setting observations interval are taken as for Step2: Locating the relative positions of the magnetic beacons and clustering the locations of magnetic beacons for end Step3: Multi-objective joint optimization Step4: Updating the set of magnetic beacons and logging magnetic-beacon observations for in if not in end =[;] end end |
3.1. Fast Identification Using Euler-Deconvolution and Clustering Methods
3.2. Fine Detection with Nonlinear Optimization
4. Joint-Factor-Graph Construction and Robust Optimization
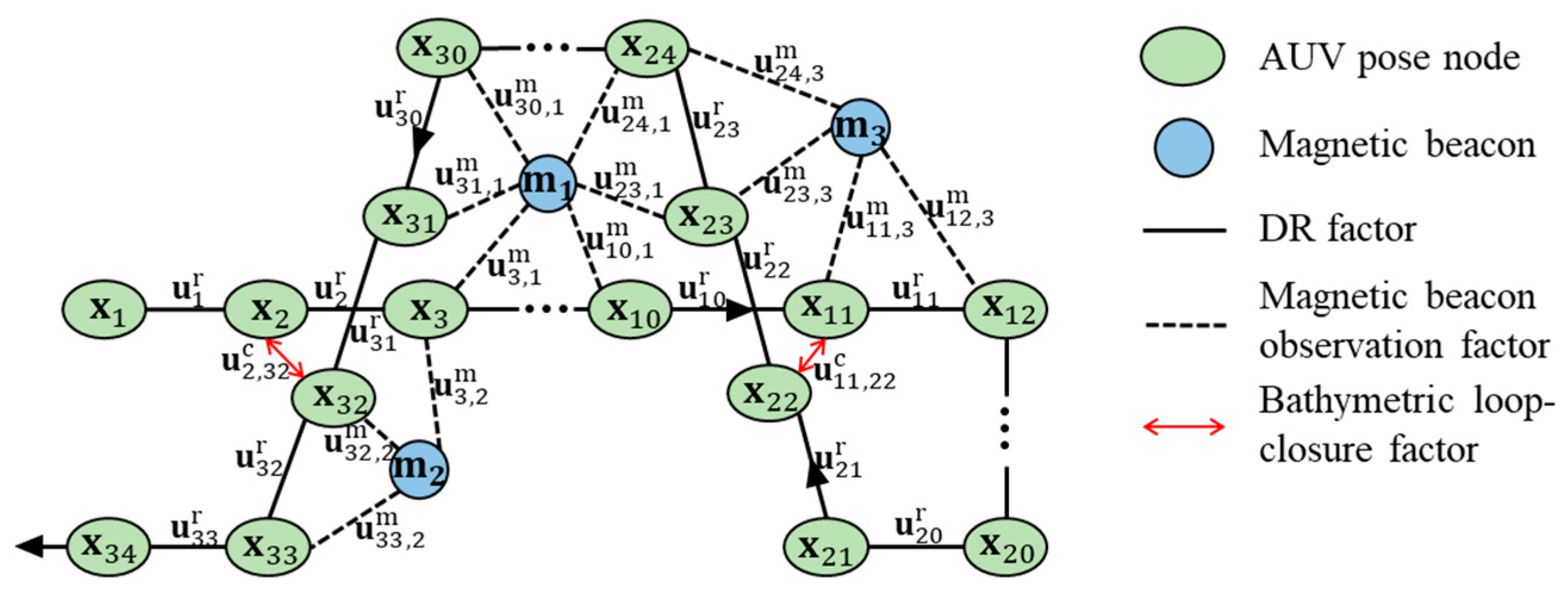
4.1. Joint-Factor-Graph Construction
4.2. Robust Back-End Optimizer
5. Experiment and Analysis
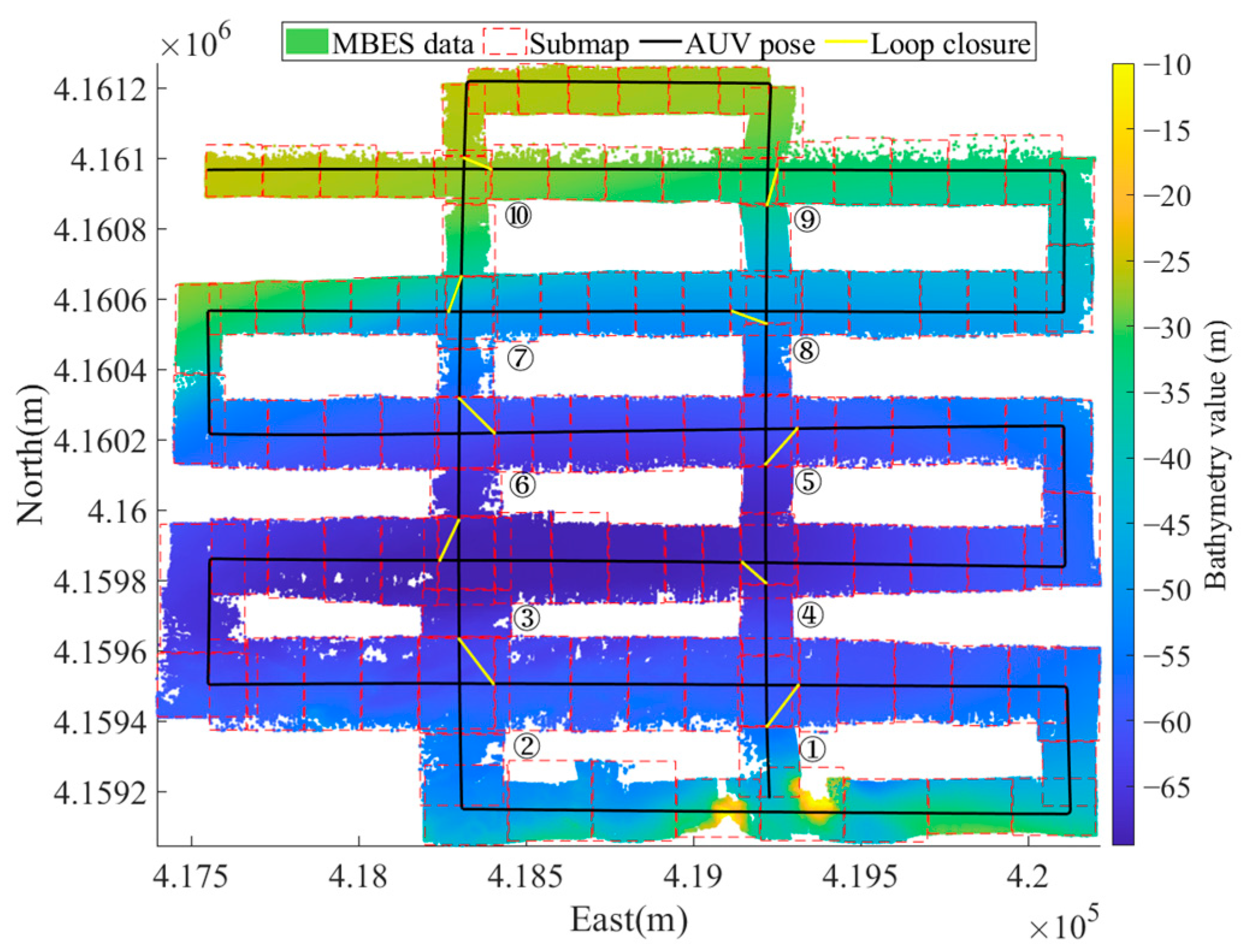
5.1. Joint-Factor-Graph Construction
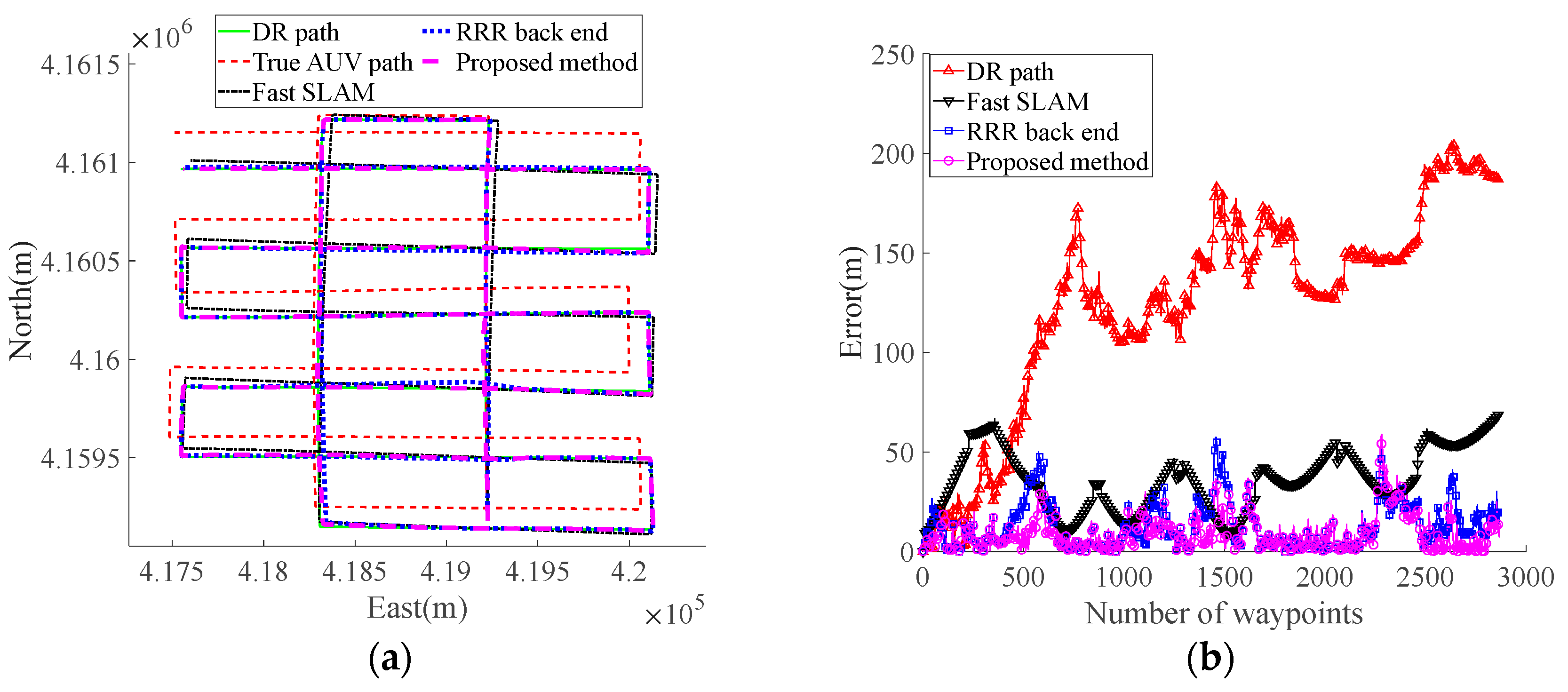
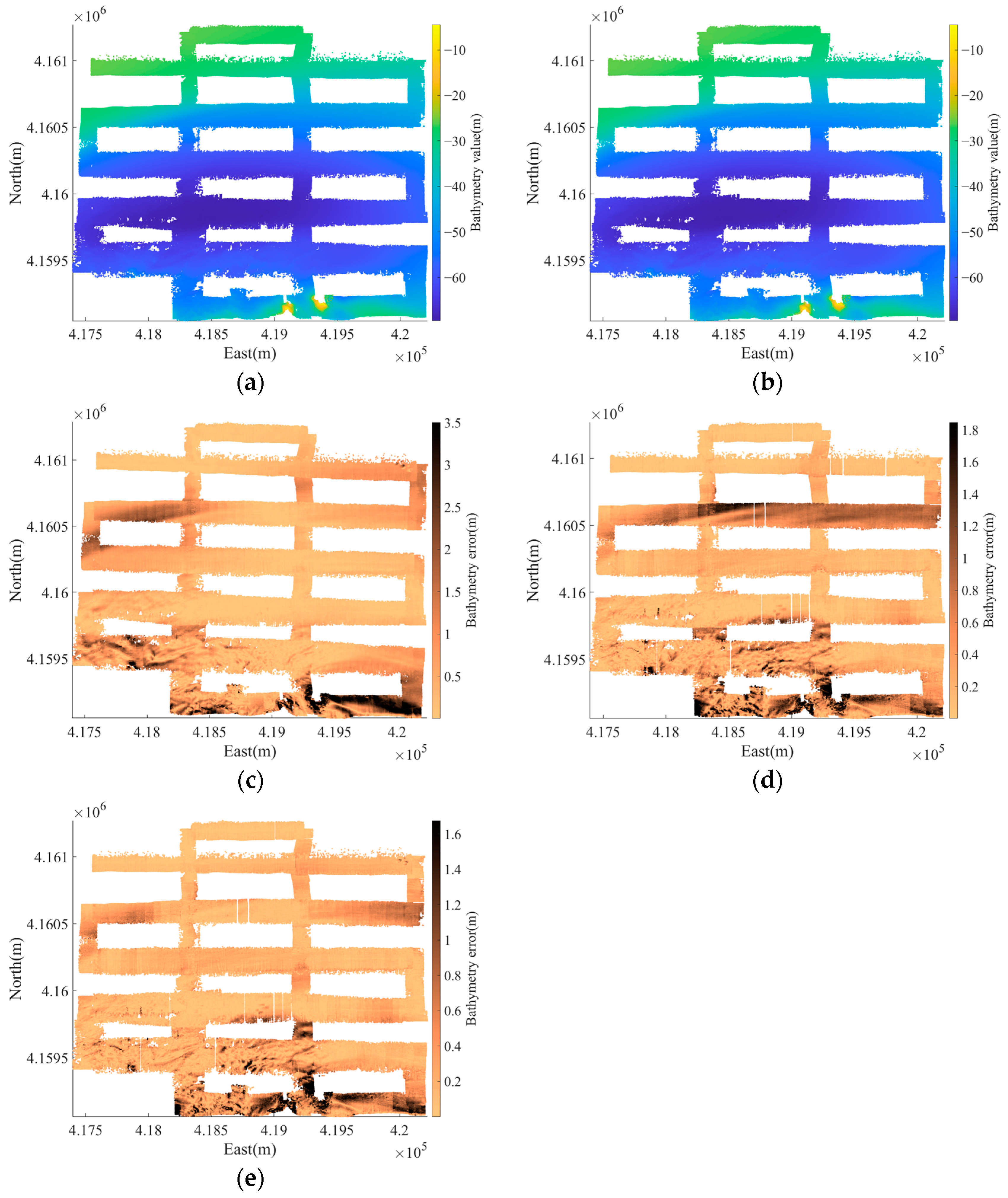
5.2. Back-End Optimization Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chutia, S.; Kakoty, N.M.; Deka, D. A Review of Underwater Robotics, Navigation, Sensing Techniques and Applications. In Advances in Robotics; Association for Computing Machinery: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Sun, K.; Cui, W.; Chen, C. Review of Underwater Sensing Technologies and Applications. Sensors 2021, 21, 7849. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle Navigation: A Review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Deng, Z.; Ge, Y.; Guan, W.; Han, K. Underwater Map-Matching Aided Inertial Navigation System Based on Multi-Geophysical Information. Front. Electr. Electron. Eng. China 2010, 5, 496–500. [Google Scholar] [CrossRef]
- Chen, P.; Li, Y.; Su, Y.; Chen, X.; Jiang, Y. Review of AUV Underwater Terrain Matching Navigation. J. Navig. 2015, 68, 1155–1172. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, N.; Xu, L.; Lin, P.; Liu, Y.; Li, X. Summary of Research on Geomagnetic Navigation Technology. IOP Conf. Ser. Earth Environ. Sci. 2021, 769, 032031. [Google Scholar] [CrossRef]
- Ånonsen, K.B.; Hagen, O.K. An Analysis of Real-Time Terrain Aided Navigation Results from a HUGIN AUV. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–9. [Google Scholar]
- Anonsen, K.B.; Hallingstad, O.; Hagen, O.K. Bayesian Terrain-Based Underwater Navigation Using an Improved State-Space Model. In Proceedings of the 2007 Symposium on Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; pp. 499–505. [Google Scholar]
- Hagen, O.K.; Ånonsen, K.B. Using Terrain Navigation to Improve Marine Vessel Navigation Systems. Mar. Technol. Soc. J. 2014, 48, 45–58. [Google Scholar] [CrossRef]
- Meduna, D.K.; Rock, S.M.; McEwen, R. Low-Cost Terrain Relative Navigation for Long-Range AUVs. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Meduna, D.K.; Rock, S.M.; McEwen, R.S. Closed-Loop Terrain Relative Navigation for AUVs with Non-Inertial Grade Navigation Sensors. In Proceedings of the 2010 IEEE/OES Autonomous Underwater Vehicles, Monterey, CA, USA, 1–3 September 2010; pp. 1–8. [Google Scholar]
- Roman, C.; Singh, H. Improved Vehicle Based Multibeam Bathymetry Using Sub-Maps and SLAM. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3662–3669. [Google Scholar]
- Roman, C.; Singh, H. A Self-Consistent Bathymetric Mapping Algorithm. J. Field Robot. 2007, 24, 23–50. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, L.-H.; Sun, F. Underwater Continuous Localization Based on Magnetic Dipole Target Using Magnetic Gradient Tensor and Draft Depth. IEEE Geosci. Remote Sens. Lett. 2014, 11, 178–180. [Google Scholar] [CrossRef]
- Alimi, R.; Fisher, E.; Nahir, K. In Situ Underwater Localization of Magnetic Sensors Using Natural Computing Algorithms. Sensors 2023, 23, 1797. [Google Scholar] [CrossRef]
- Chang, S.; Lin, Y.; Fu, X.; Wan, C. A Simultaneous Localization and Mapping Approach Based on Detection of Magnetic Beacons. IEEE Magn. Lett. 2021, 12, 1–5. [Google Scholar] [CrossRef]
- Chang, S.; Wan, C.; Zhang, D.; Li, H.; Lin, Y. An Underwater SLAM Approach Using Regularly Distributed Magnetic Beacons. In Advances in Guidance, Navigation and Control; Yan, L., Duan, H., Deng, Y., Eds.; Springer Nature: Singapore, 2023; pp. 300–308. [Google Scholar]
- Du, C.P.; Xia, M.Y.; Huang, S.X.; Xu, Z.H.; Peng, X.; Guo, H. Detection of a Moving Magnetic Dipole Target Using Multiple Scalar Magnetometers. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1166–1170. [Google Scholar] [CrossRef]
- Wu, M.; Yao, J. Adaptive UKF-SLAM Based on Magnetic Gradient Inversion Method for Underwater Navigation. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 839–843. [Google Scholar]
- Zhao, W.; He, T.; Sani, A.Y.M.; Yao, T. Review of SLAM Techniques for Autonomous Underwater Vehicles. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, New York, NY, USA, 20 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 384–389. [Google Scholar]
- Hidalgo, F.; Bräunl, T. Review of Underwater SLAM Techniques. In Proceedings of the 2015 6th International Conference on Automation, Robotics and Applications (ICARA), Queenstown, New Zealand, 17–19 February 2015; pp. 306–311. [Google Scholar]
- Lee, K.-M.; Li, M. Magnetic Tensor Sensor for Gradient-Based Localization of Ferrous Object in Geomagnetic Field. IEEE Trans. Magn. 2016, 52, 4002610. [Google Scholar] [CrossRef]
- Palomer, A.; Ridao, P.; Ribas, D.; Mallios, A.; Gracias, N.; Vallicrosa, G. Bathymetry-Based SLAM with Difference of Normals Point-Cloud Subsampling and Probabilistic ICP Registration. In Proceedings of the 2013 MTS/IEEE OCEANS—Bergen, Bergen, Norway, 10–13 June 2013; pp. 1–8. [Google Scholar]
- Palomer, A.; Ridao, P.; Ribas, D. Multibeam 3D Underwater SLAM with Probabilistic Registration. Sensors 2016, 16, 560. [Google Scholar] [CrossRef]
- Jung, J.; Park, J.; Choi, J.; Choi, H.-T. Bathymetric Pose Graph Optimization With Regularized Submap Matching. IEEE Access 2022, 10, 31155–31164. [Google Scholar] [CrossRef]
- Bichucher, V.; Walls, J.M.; Ozog, P.; Skinner, K.A.; Eustice, R.M. Bathymetric Factor Graph SLAM with Sparse Point Cloud Alignment. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–7. [Google Scholar]
- Kim, J.; Jung, H.S. An Approach towards Online Bathymetric SLAM. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–6. [Google Scholar]
- Barkby, S.; Williams, S.B.; Pizarro, O.; Jakuba, M.V. A Featureless Approach to Efficient Bathymetric SLAM Using Distributed Particle Mapping. J. Field Robot. 2011, 28, 19–39. [Google Scholar] [CrossRef]
- Callmer, J.; Skoglund, M.; Gustafsson, F. Silent Localization of Underwater Sensors Using Magnetometers. Eurasip J. Adv. Signal Process. 2010, 2010, 1–8. [Google Scholar] [CrossRef]
- Torroba, I.; Cella, M.; Terán, A.; Rolleberg, N.; Folkesson, J. Online Stochastic Variational Gaussian Process Mapping for Large-Scale Bathymetric SLAM in Real Time. IEEE Robot. Autom. Lett. 2023, 8, 3150–3157. [Google Scholar] [CrossRef]
- He, B.; Ying, L.; Zhang, S.; Feng, X.; Yan, T.; Nian, R.; Shen, Y. Autonomous Navigation Based on Unscented-FastSLAM Using Particle Swarm Optimization for Autonomous Underwater Vehicles. Measurement 2015, 71, 89–101. [Google Scholar] [CrossRef]
- Barkby, S.; Williams, S.B.; Pizarro, O.; Jakuba, M.V. Bathymetric Particle Filter SLAM Using Trajectory Maps. Int. J. Robot. Res. 2012, 31, 1409–1430. [Google Scholar] [CrossRef]
- Ling, Y.; Li, Y.; Ma, T.; Cong, Z.; Xu, S.; Li, Z. Active Bathymetric SLAM for Autonomous Underwater Exploration. Appl. Ocean Res. 2023, 130, 103439. [Google Scholar] [CrossRef]
- Sünderhauf, N.; Protzel, P. Switchable Constraints for Robust Pose Graph SLAM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 1879–1884. [Google Scholar]
- Latif, Y.; Cadena, C.; Neira, J. Realizing, Reversing, Recovering: Incremental Robust Loop Closing over Time Using the iRRR Algorithm. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 4211–4217. [Google Scholar]
- Hitchcox, T.; Forbes, J.R. A Point Cloud Registration Pipeline Using Gaussian Process Regression for Bathymetric SLAM. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020; pp. 4615–4622. [Google Scholar]
- Donoso, F.A.; Austin, K.J.; McAree, P.R. How Do ICP Variants Perform When Used for Scan Matching Terrain Point Clouds? Robot. Auton. Syst. 2017, 87, 147–161. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Segal, A.; Hhnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotics: Science and Systems V, University of Washington, Seattle, WA, USA, 28 June–1 July 2009. [Google Scholar]
- Ren, Y.; Hu, C.; Xiang, S.; Feng, Z. Magnetic Dipole Model in the Near-Field. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 1085–1089. [Google Scholar]
- Teixeira, F.C.; Pascoal, A. Magnetic Navigation and Tracking of Underwater Vehicles. IFAC Proc. Vol. 2013, 46, 239–244. [Google Scholar] [CrossRef]
- Tran, T.N.; Drab, K.; Daszykowski, M. Revised DBSCAN Algorithm to Cluster Data with Dense Adjacent Clusters. Chemom. Intell. Lab. Syst. 2013, 120, 92–96. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S.; Koller, D.; Wegbreit, B. FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem. In Proceedings of the Eighteenth National Conference on Artificial Intelligence, Edmonton, AB, Canada, 28 July–1 August 2002; pp. 593–598. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, S.; Zhang, D.; Zhang, L.; Zou, G.; Wan, C.; Ma, W.; Zhou, Q. A Joint Graph-Based Approach for Simultaneous Underwater Localization and Mapping for AUV Navigation Fusing Bathymetric and Magnetic-Beacon-Observation Data. J. Mar. Sci. Eng. 2024, 12, 954. https://doi.org/10.3390/jmse12060954
Chang S, Zhang D, Zhang L, Zou G, Wan C, Ma W, Zhou Q. A Joint Graph-Based Approach for Simultaneous Underwater Localization and Mapping for AUV Navigation Fusing Bathymetric and Magnetic-Beacon-Observation Data. Journal of Marine Science and Engineering. 2024; 12(6):954. https://doi.org/10.3390/jmse12060954
Chicago/Turabian StyleChang, Shuai, Dalong Zhang, Linfeng Zhang, Guoji Zou, Chengcheng Wan, Wencong Ma, and Qingji Zhou. 2024. "A Joint Graph-Based Approach for Simultaneous Underwater Localization and Mapping for AUV Navigation Fusing Bathymetric and Magnetic-Beacon-Observation Data" Journal of Marine Science and Engineering 12, no. 6: 954. https://doi.org/10.3390/jmse12060954
APA StyleChang, S., Zhang, D., Zhang, L., Zou, G., Wan, C., Ma, W., & Zhou, Q. (2024). A Joint Graph-Based Approach for Simultaneous Underwater Localization and Mapping for AUV Navigation Fusing Bathymetric and Magnetic-Beacon-Observation Data. Journal of Marine Science and Engineering, 12(6), 954. https://doi.org/10.3390/jmse12060954