2.1. Motion Responses
The potential flow theory has achieved satisfactory results in studying wave forces, and so has rapidly developed in ocean engineering. For the motion response of large-scale components, it will have a significant impact on incident waves in seawater, with the most significant effects being diffraction and reflection effects [
31].
- (1)
Basic assumption
The following assumptions are given: The fluid is an ideal fluid, being inviscid, uniform, and incompressible, with no rotation in motion; the incident wave adopts the linear small-amplitude wave theory, and the wave motion on the free surface and the motion of the structure are micro amplitude.
- (2)
Velocity potential
The water depth
remains constant, the
plane of the coordinate system
concurs with the static water surface, and the
axis is vertically upward; the free surface can be represented as follows:
where
is time,
are the 6DOF motion vectors, and
is the wavefront fluctuation. Under the assumed condition of the small-amplitude wave, the wavefront fluctuation
is a small quantity; this is used to linearize the kinematic and dynamic conditions of the free surface.
Using the velocity potential to depict the flow field, it satisfies the following conditions.
Laplace’s equation is satisfied in the basin:
Impermeability of the seabed:
Dynamic conditions of free surface:
Kinematics conditions of free surface:
Under the condition of the small-amplitude wave, the wavefront fluctuation
is small, and the velocity of fluid particles in the wave is also small, so the high-order small quantity containing
can be omitted. According to the conservation theorem of a continuous fluid line, the velocity of a point on the free surface is equal to that of the fluid particle on the free surface, and the pressure on the free surface must be equal to the pressure of the atmosphere above the free surface, so it satisfies the following equation:
Because the wave motion of the free surface and the motion of the floating body are small, the velocity potential of the flow field with a floating rigid body in the wave with harmonic propagation can be regarded as linear, so the velocity potential in the flow field can be expressed by the superposition of three parts:
where
is the incident potential of the wave disturbed by a floating body,
is the wave diffraction potential caused by the wave passing through the floating body, and
is the radiation potential, which is produced by the oscillating motion of the floating body.
If it is assumed that the structure oscillates slightly around the equilibrium position, the above velocity potential can be broken down into the product of the space velocity potential
and the time factor
:
Similarly, the incident potential, the diffraction potential and the radiation potential can be expressed as follows:
That is, after separating the time factor, the spatial velocity potential can be expressed as the linear superposition of the incident potential, diffraction potential and radiation potential, as follows:
Green’s function method can also be used to solve the Laplace equation under definite boundary conditions, as shown in Formulas (2)–(5) above. The free surface source potential is selected as the Green function, and the total velocity potential can be obtained by calculating the above boundary conditions using Green’s Theorem; then, the pressure distribution on the surface of the object can be obtained, and finally the wave force and moment acting on the object can be obtained, as follows:
And moment:
where
is the wet surface of the floating body and
is directed to the fluid load from inside the floating body.
and
are the radiation loads caused by the forced vibration of the floating body,
and
are the loads caused by the incident waves,
and
are the loads caused by the diffracted waves, and
and
are hydrostatic loads.
The dynamic equations of the culture platform under free movement in the frequency domain are as follows:
where
is the displacement of the floating body,
is the mass or inertia mass of the culture platform,
is the additional mass or inertia mass,
is the damping, and
is the restoration stiffness.
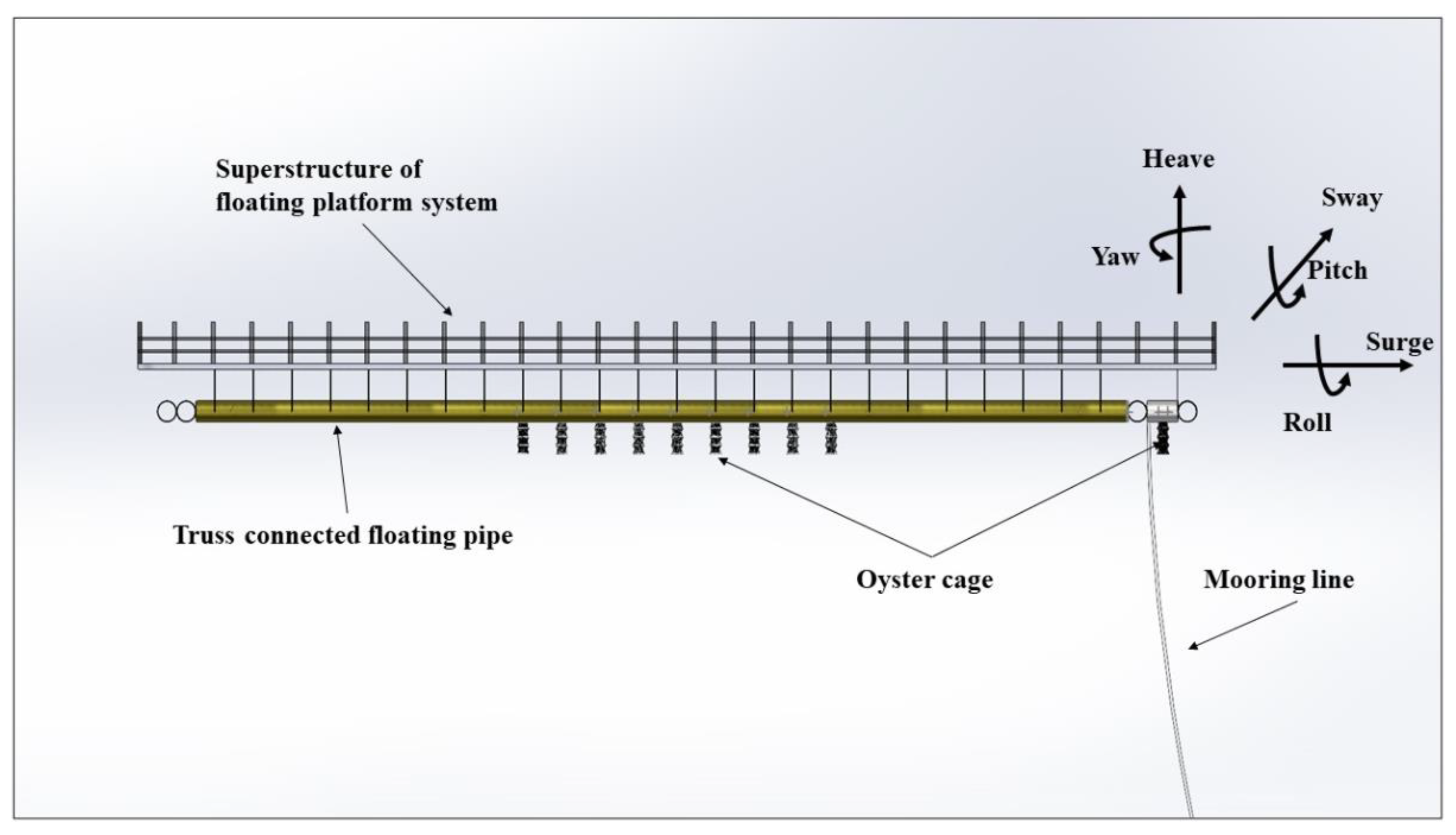
The floating platform motion response amplitude operator (RAO) refers to the rate of the displacement of the floating body in the direction of freedom degree to the wave amplitude, which represents the floating body’s motion response characteristics based on the action of linear waves. Mathematically, the formula is as follows:
where
is the displacement of the floating body (in length units for surge, sway, heave, in degrees for roll, pitch, yaw),
is the wave amplitude,
is the frequency,
is time,
is the response amplitude operator (RAO) amplitude and
is the RAO phase.
2.2. Environmental Loads
The wave-induced loads acting on the platform structure are caused by the pressure field generated by waves [
32,
33]. For the convenience of subsequent calculations, the wave-induced load is divided into three parts in this paper. For small-scale structures, the drag and inertia forces of waves are the main components. The wave loads on such structures can usually be calculated using the Morison equation, where the total wave force acting on a slender rigid body can be expressed as the sum of resistance
and inertia forces
, and the resistance term is taken as a function of velocity.
According to Marine Structural Design [
34] and Wu et al. [
35], the Bretschneider wave spectrum was used to display the random wave characteristics and analyze the response of flexible pipes in the marine environment. The Bretschnerder spectrum is a two-parameter spectrum composed of a period and wave height, and the two parameters can be specified, respectively. Its form is as follows:
where
, and
are the significant wave period and the peak period, respectively.
is the significant wave height.
For small-scale structures, the drag and inertia forces of waves are the main components. The wave loads on such structures can usually be calculated using the Morison equation [
30], where the total wave force acting on a slender rigid body can be expressed as the sum of resistance
and inertia forces
, and the resistance term is taken as a function of velocity.
Among them,
where
is the projected area of the object,
is the volume of the object,
is the density of the object,
is the velocity of the fluid, a dot
is the acceleration of the fluid,
is the resistance coefficient, and
is the coefficient of inertia.
Based on the assumption of the small-amplitude wave, the value of the second-order wave force is much smaller than that of the first-order wave force, so the effect of the second-order wave force is not considered in the subsequent calculation. The time domain motion equation of a floating body is as follows [
12,
36,
37]:
where
are the inferred mass matrix and additional mass matrix of the floating body, respectively;
is the delay function matrix of the system;
is the hydrostatic restoring force coefficient matrix of the floating body;
is the first-order wave force;
is the wind resistance;
is the current flow force;
is the second-order wave force; and
is the mooring force.
The effect is assumed to be linear superposition. Currently, the empirical formula for the wind force
calculation is as follows:
where
is the wind resistance;
is the air density;
is the upwind area;
is the relative velocity between the pipe section and the wind; and
is the wind resistance coefficient.
The formula for calculating the current flow force
is as follows:
where
is the current flow force;
is the sea water density;
is the area of the upstream;
is the relative velocity between the floating body and the current; and
is the water resistance coefficient.
Please refer to the book
OFFSHORE HYDROMECHANICS [
37] for detailed theoretical derivation.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}