
ICEEMDAN/LOESS: An Improved Vibration-Signal Analysis Method for Marine Atomic Interferometric Gravimetry


Abstract
1. Introduction
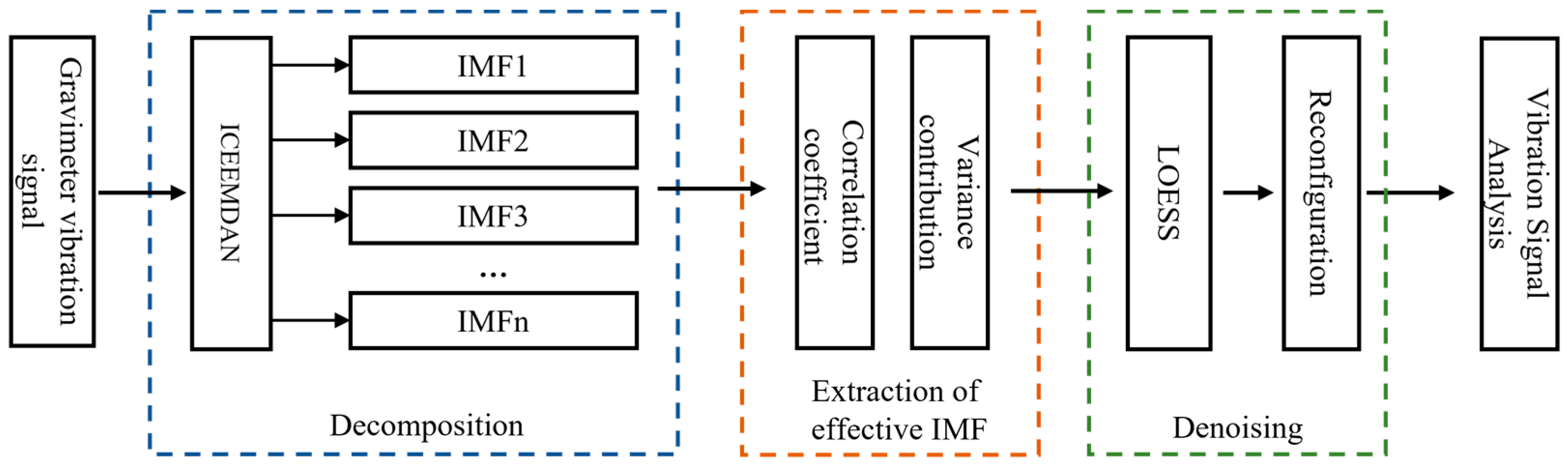
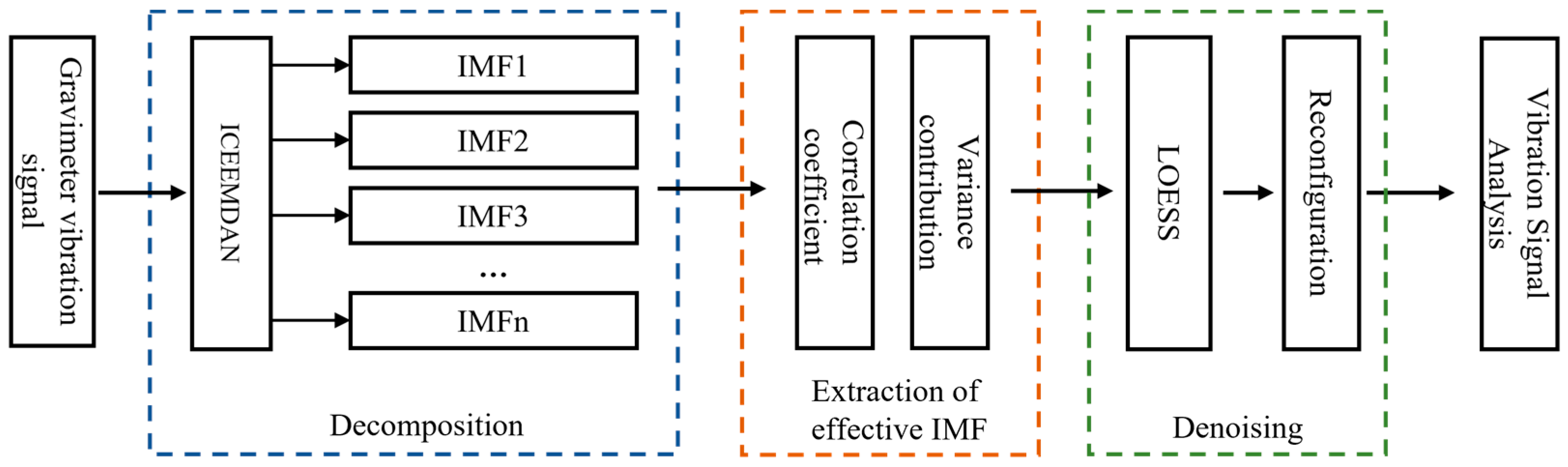
2. Materials and Methods
2.1. Improved Complete Ensemble EMD
- Step 1:
- Define as the signal to be decomposed and as a constant coefficient. Let be a realization of white Gaussian noise with zero and unit variance.
- Step 2:
- Add group I white noise to the original signal, construct the sequence , and obtain the first set of residuals .
- Step 3:
- Calculate the first modal component .
- Step 4:
- Continue adding white noise, calculate the second set of residuals using local mean decomposition, and define the second modal component , .
- Step 5:
- Calculate the Kth residual and the modal component .
- Step 6:
- Until the end of the computational decomposition, all modalities and residual numbers are obtained.
2.2. Determination of the Effective IMF Component
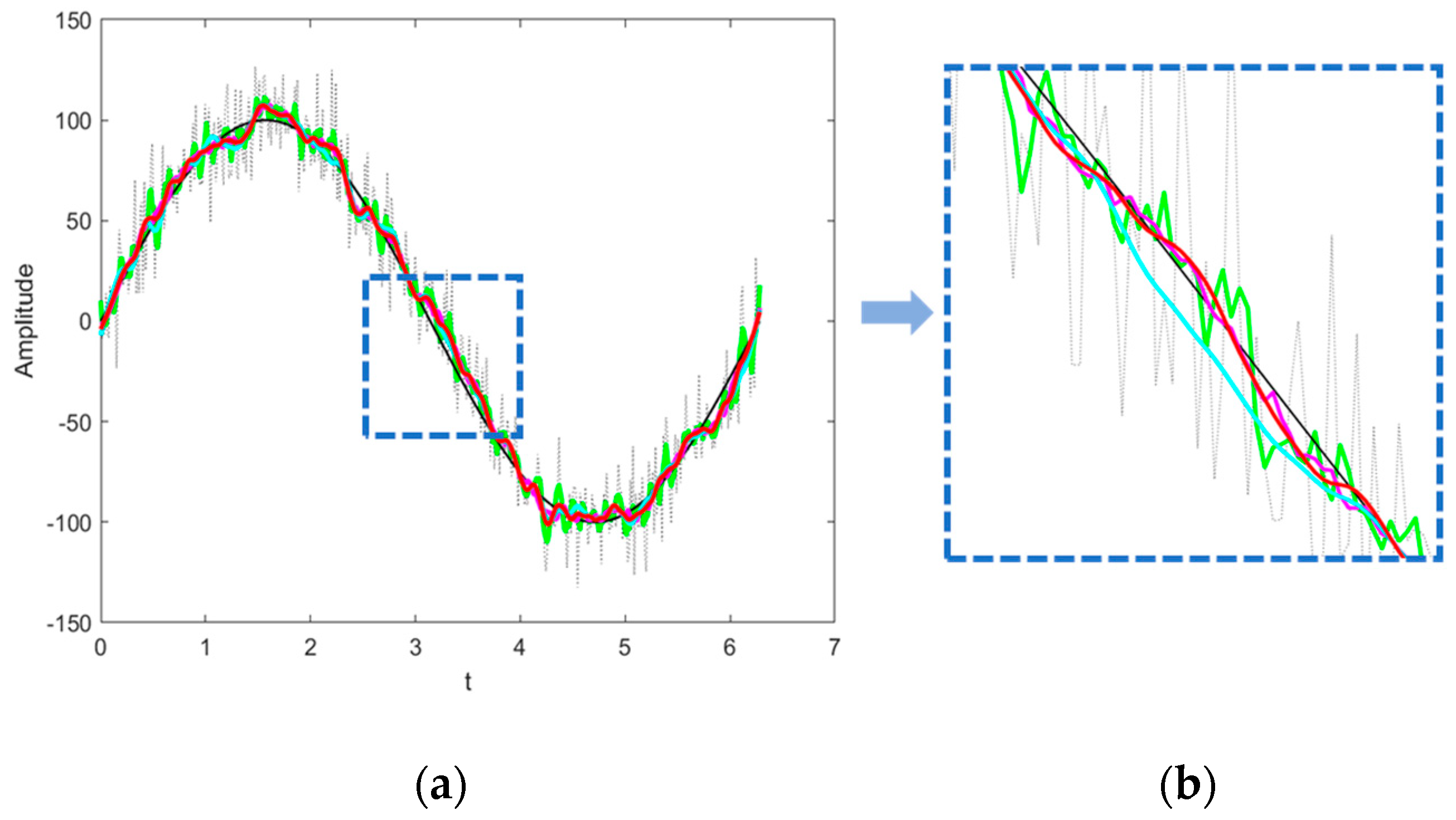
2.3. Noise Signal Filtering
3. Simulation Experiments and Results
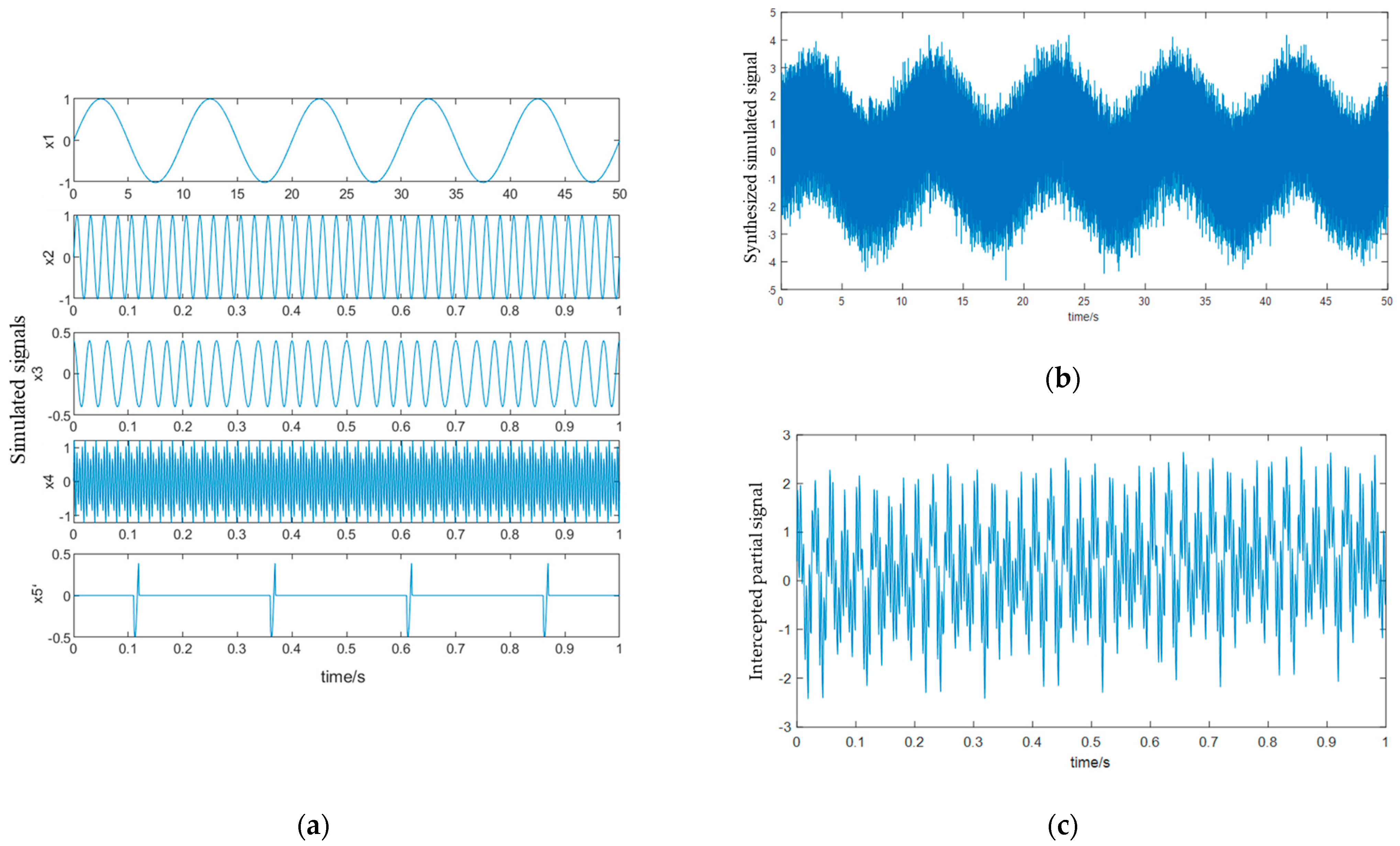
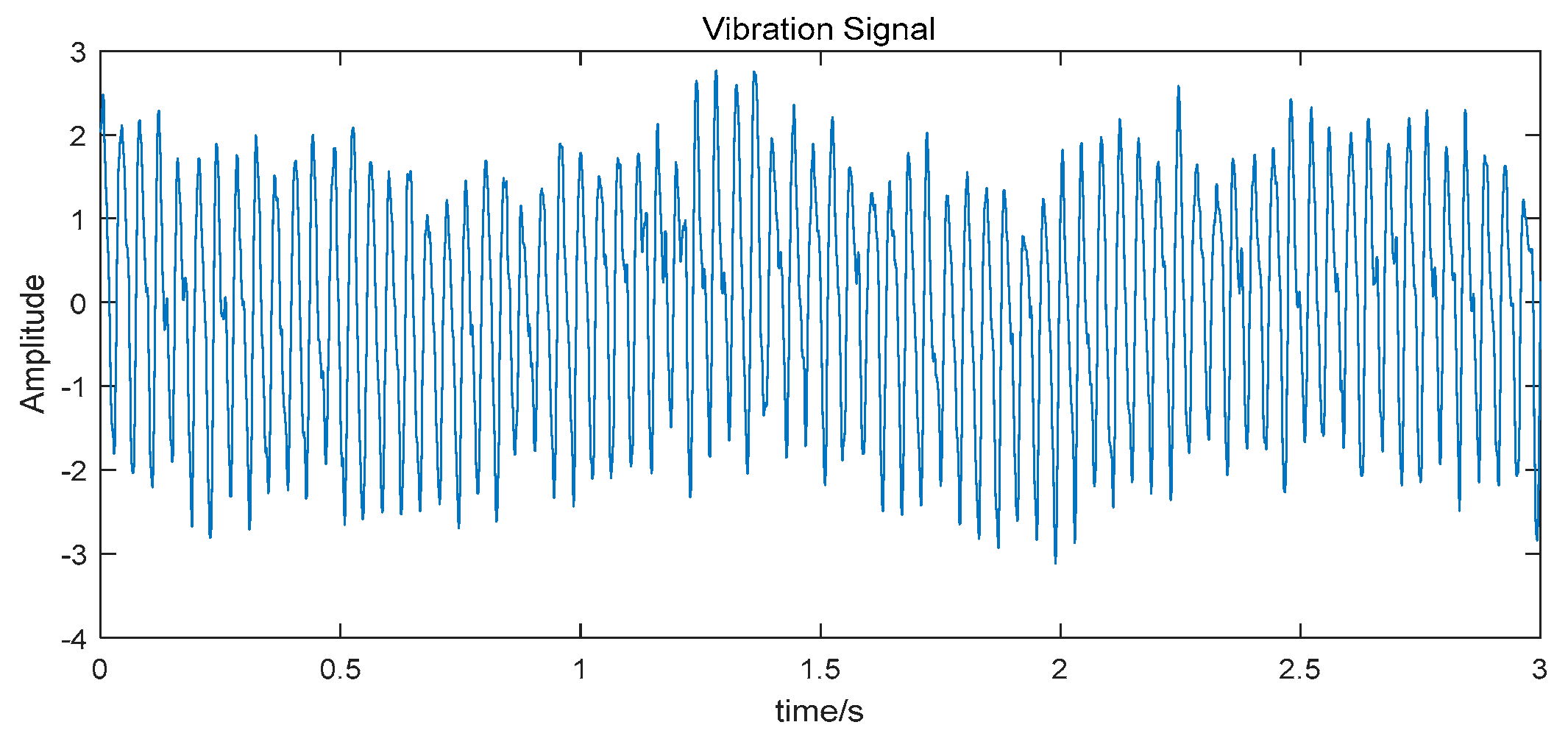
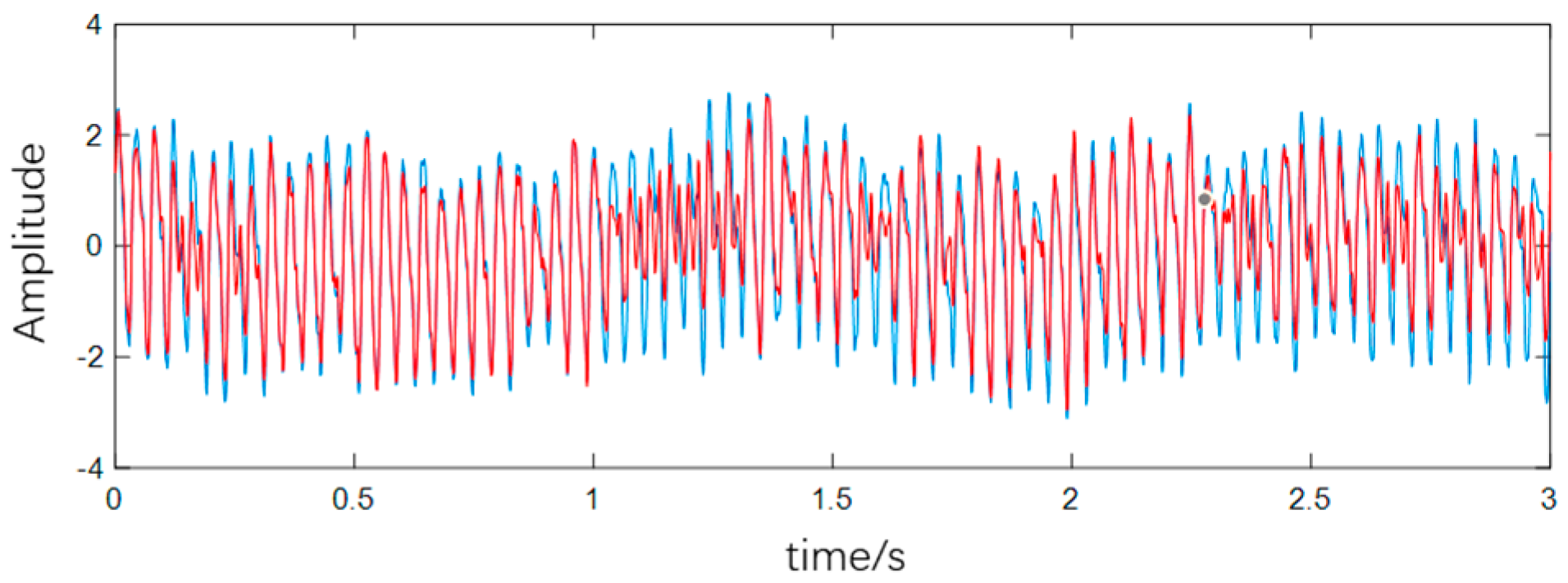
3.1. Artificial Signals
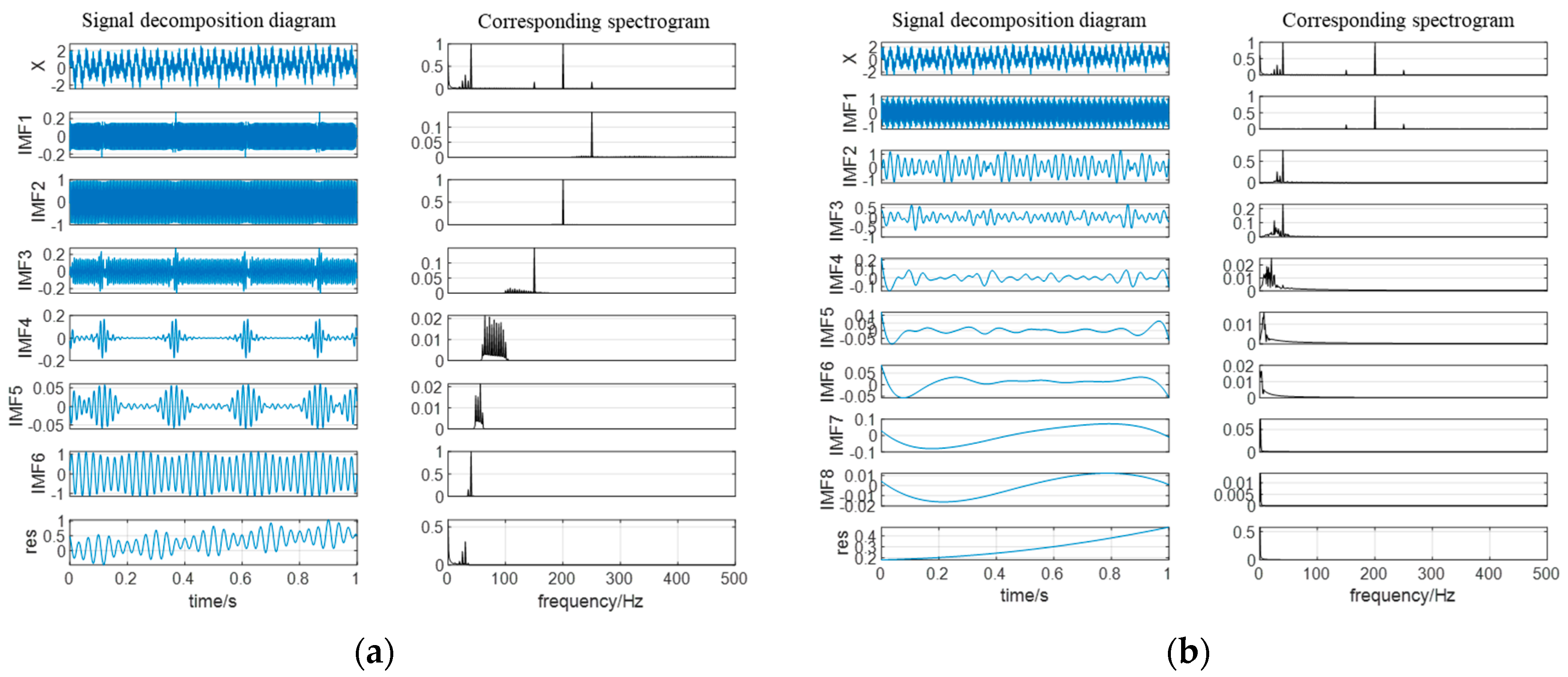
3.2. ICEEMDAN Decomposition Signal Analysis
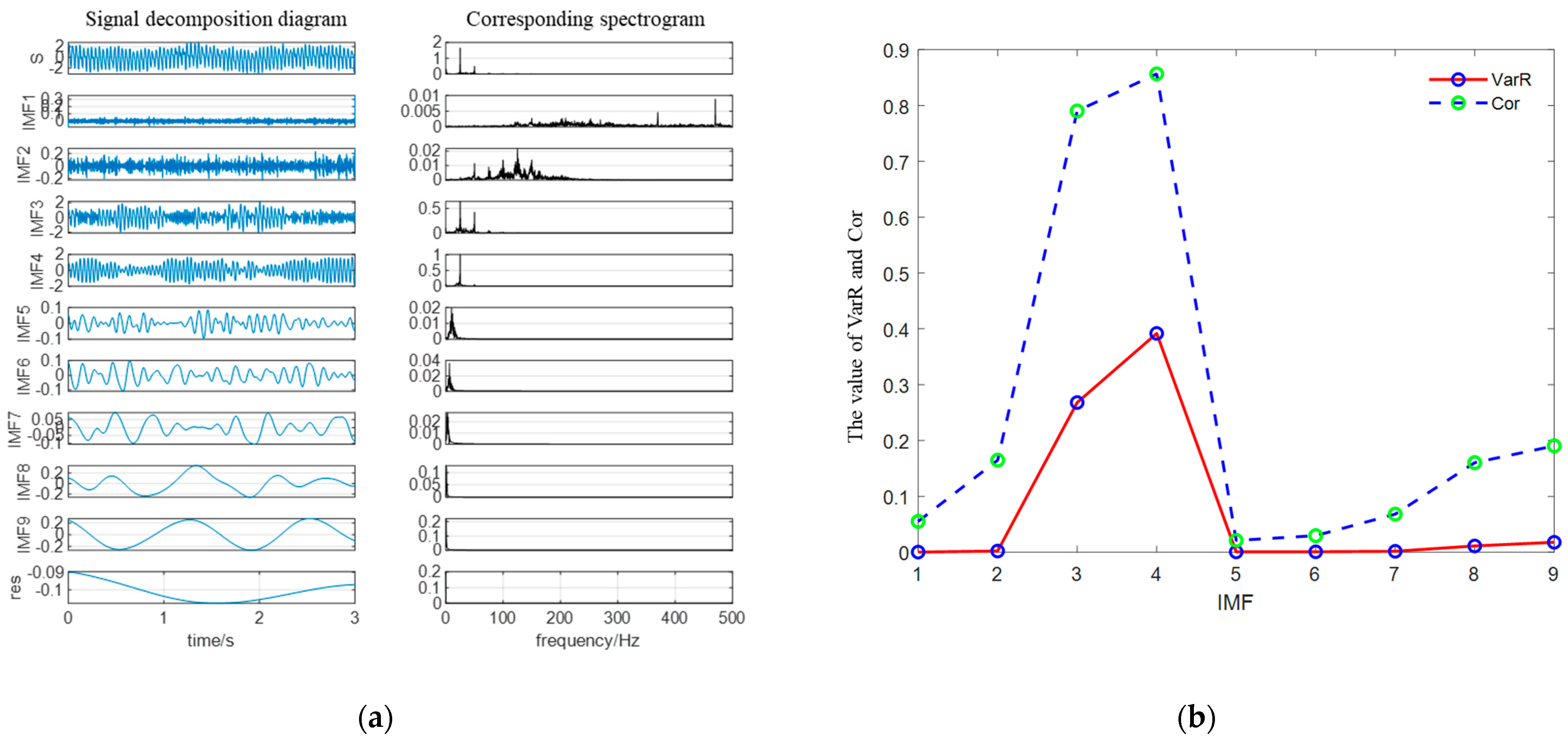
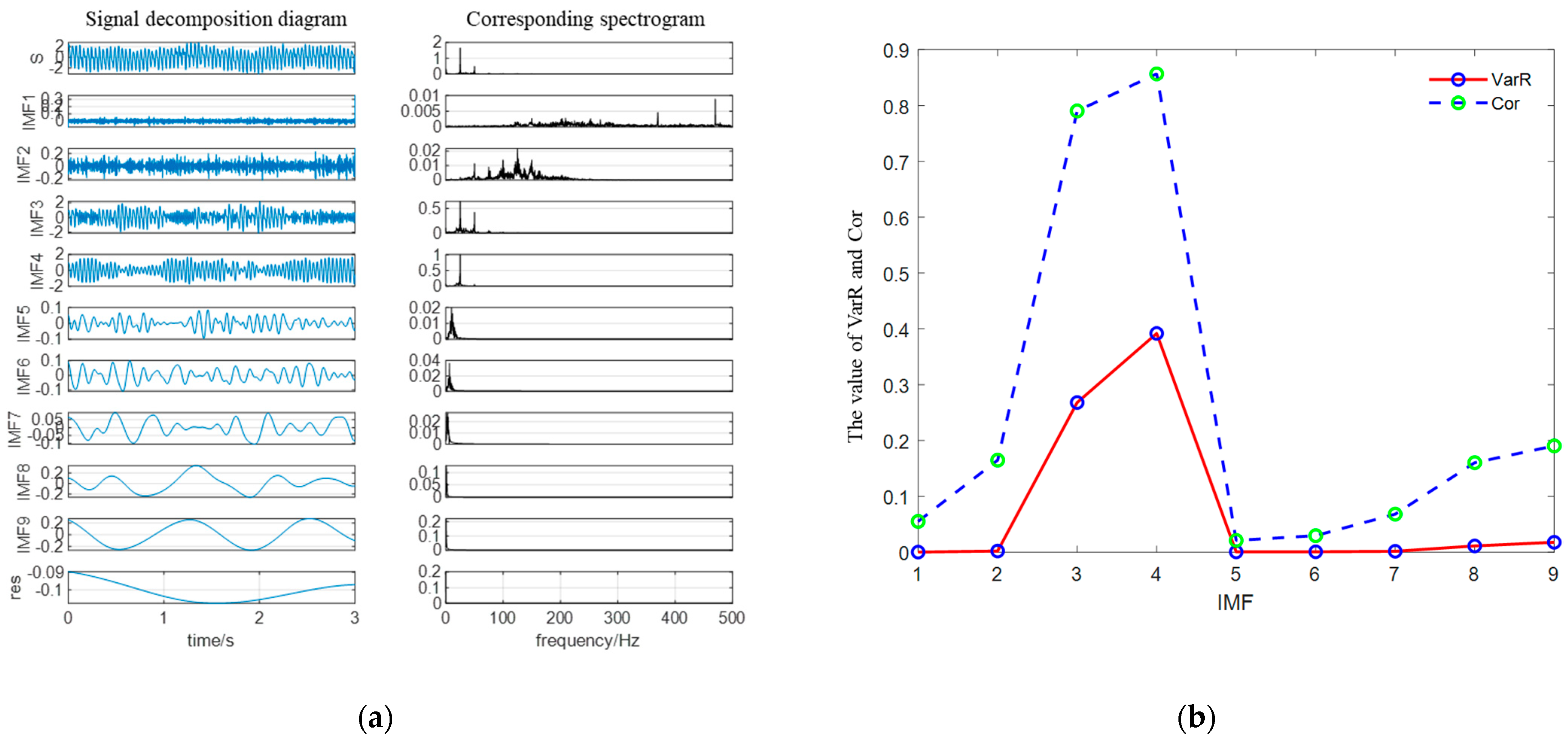
- Comparison of decomposition results. The time-domain and frequency-domain results of each IMF component and residual component (res) obtained using the four decomposition methods are shown in Figure 3. Comparing the decomposition results in Figure 3, we can see that EWT needs to set its maximum decomposition order based on a priori knowledge, and the other three types of EMD methods are all adaptive decomposition, which reduces the subjectivity of human experience. However, there is serious modal confounding between the components obtained by EEMD, while the improved adaptive noise-assisted ICEEMDAN attenuates this modal confounding phenomenon. Meanwhile, EEMD and CEEMDAN decompose more than eight IMF components: EEMD decomposition starts from IMF6, and CEEMDAN decomposition starts from IMF8, and the signal components have very small energy, and these components may be spurious components appearing in the decomposition and do not represent the information of the original signal. In contrast, in the improved adaptive noise-assisted ICEEMDAN decomposition, not only the main frequency components are decomposed, but also only a smaller number of IMF components are decomposed. This is due to its strict adherence to the global stopping criterion of EMD decomposition, in which the decomposition ends once the conditions for stopping the decomposition are met and the entire cycle is stopped.
- 2.
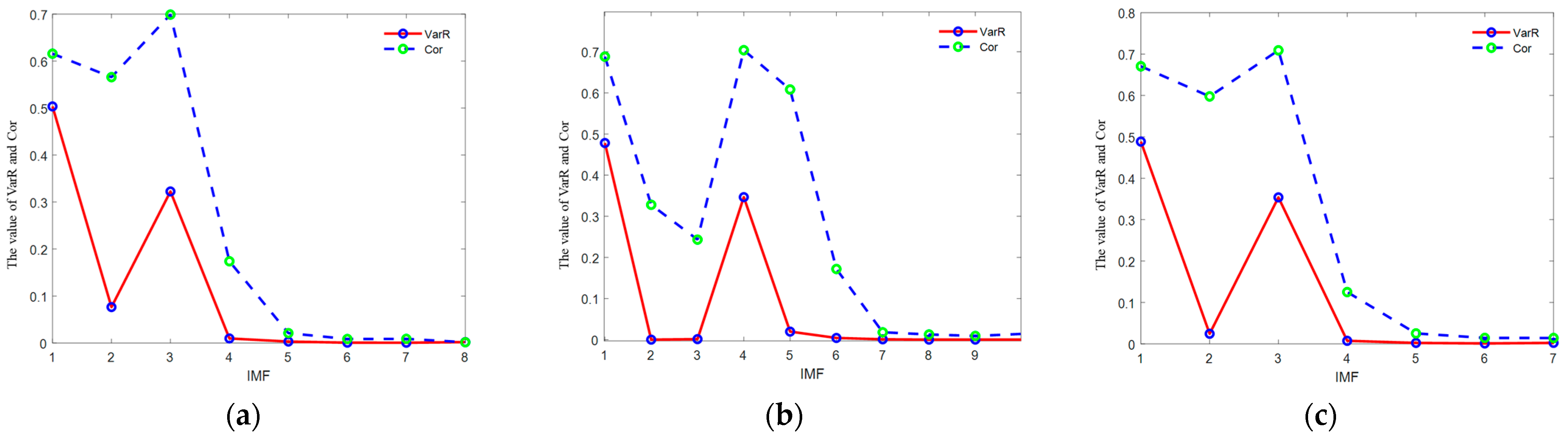
- Analysis of the effective IMF component. The signal is decomposed by the above three methods to obtain a set of IMF components that portray different frequency information of the signal respectively, and the frequency distribution information within each IMF component is different, and the variance contribution rate and correlation coefficient of the IMF components obtained by combining the three methods of decomposition in Section 2.2 are calculated as shown in Figure 4, and the validity of the IMF components is analyzed.
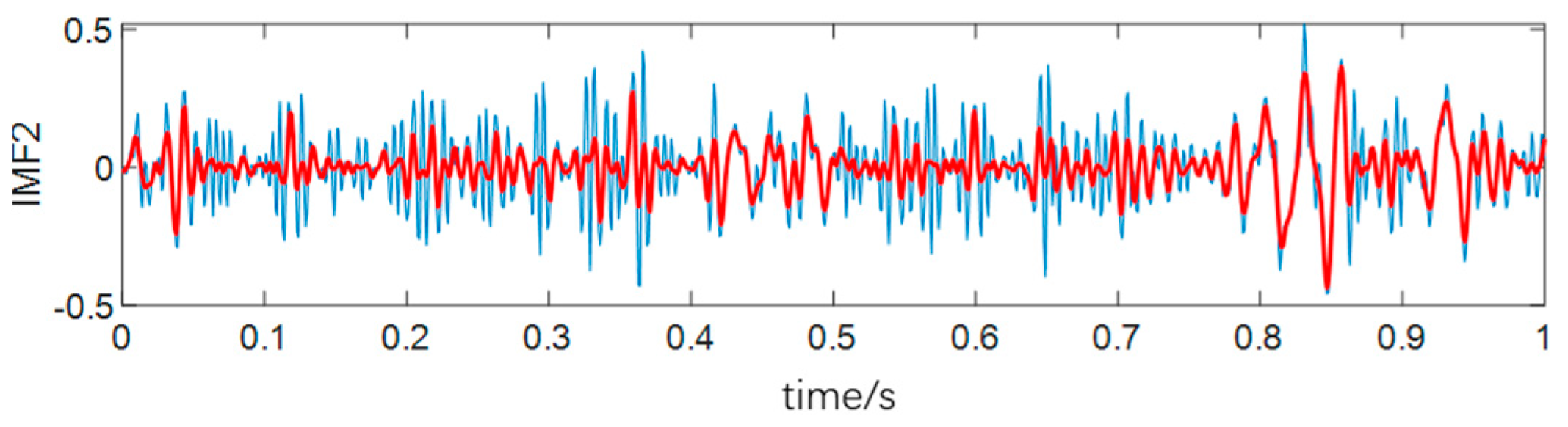
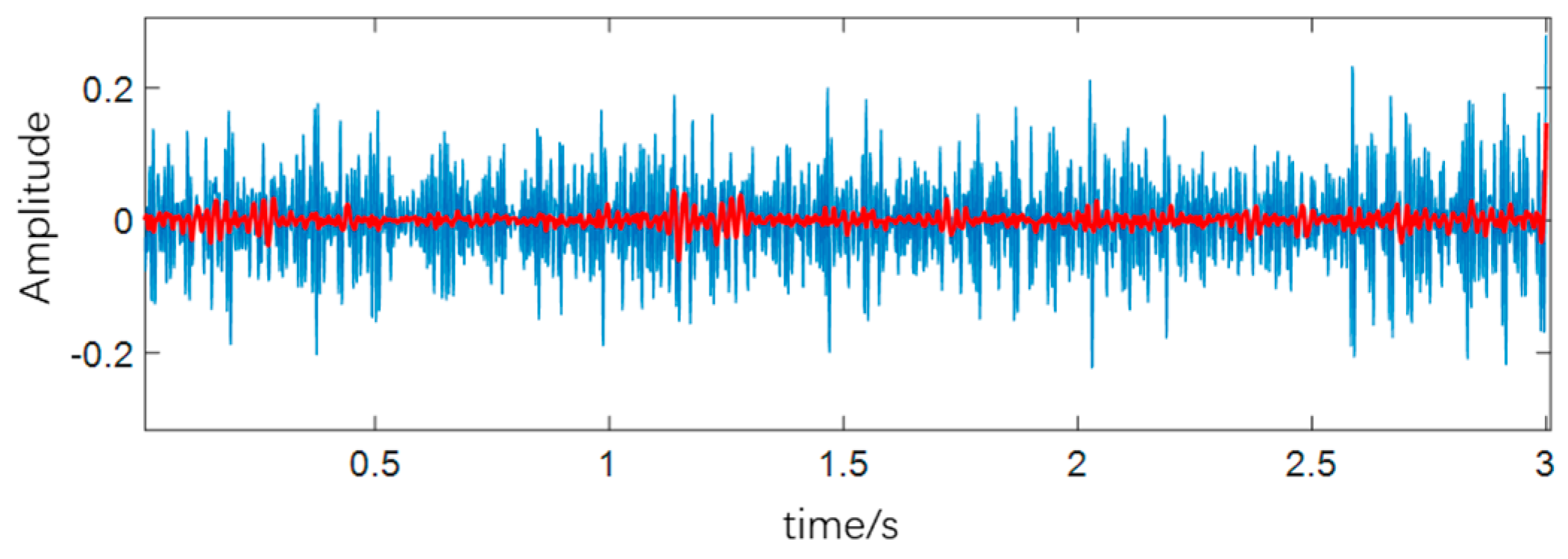
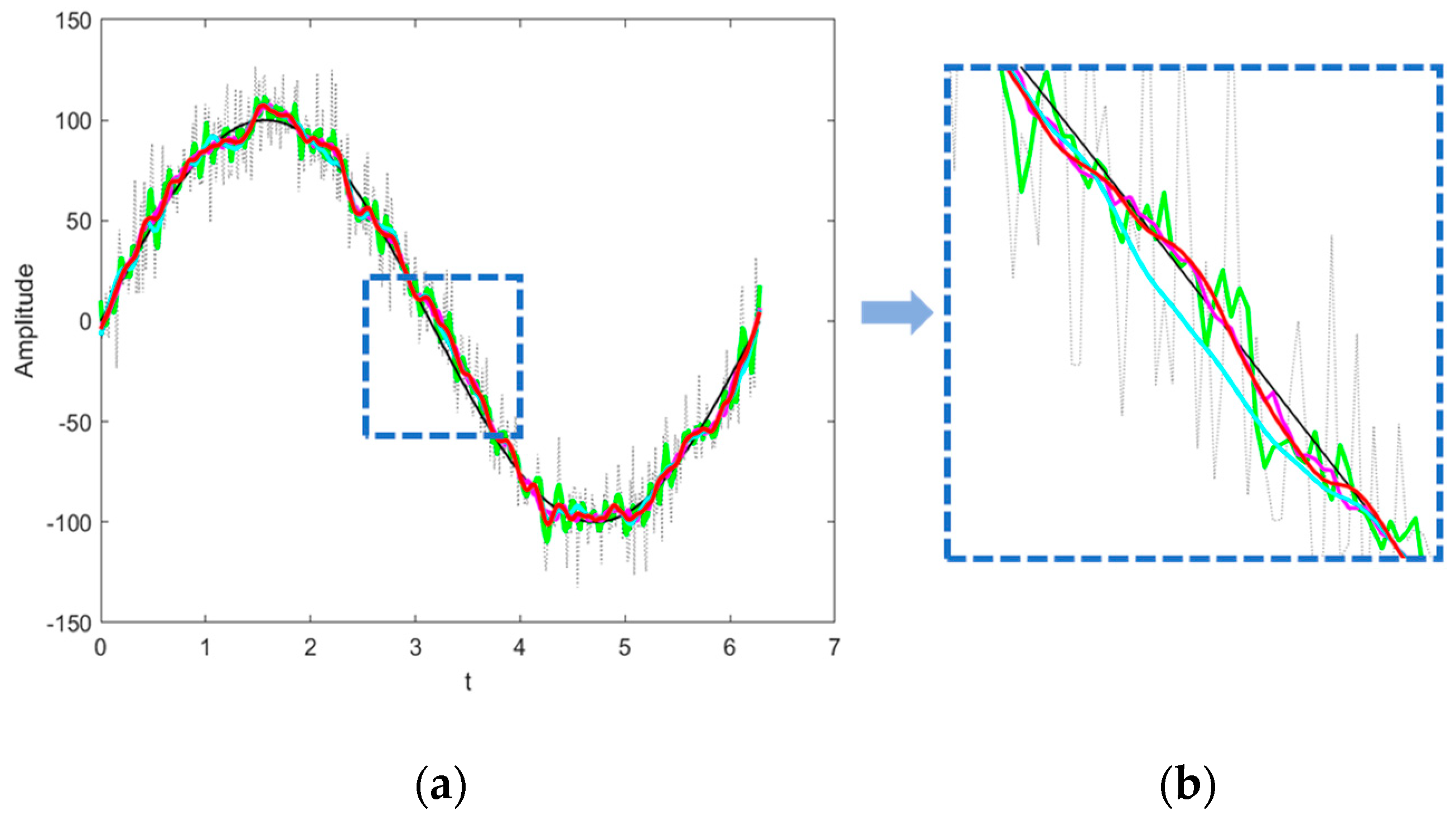
3.3. IMF Component Filtering Analysis
3.4. Evaluation of Results
4. Vibration Measurement Signal Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kasevich, M.; Chu, S. Atomic interferometry using stimulated Raman transitions. Phys. Rev. Lett. 1991, 67, 181–184. [Google Scholar] [CrossRef]
- Peters, A.; Chung, K.Y.; Chu, S. Measurement of gravitational acceleration by dropping atoms. Nature 1999, 400, 849–852. [Google Scholar] [CrossRef]
- Tino, G.M. Testing gravity with cold atom interferometry: Results and prospects. Quantum Sci. Technol. 2021, 6, 024014. [Google Scholar] [CrossRef]
- Taylor, R.G.; Scanlon, B.; Döll, P.; Rodell, M.; Van Beek, R.; Wada, Y.; Longuevergne, L.; Leblanc, M.; Famiglietti, J.S.; Edmunds, M.; et al. Groundwater and climate change. Nat. Clim. Chang. 2013, 3, 322–329. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE Measurements of Mass Variability in the Earth System. Science 2004, 305, 503–505. [Google Scholar] [CrossRef]
- Van Camp, M.; de Viron, O.; Watlet, A.; Meurers, B.; Francis, O.; Caudron, C. Geophysics From Terrestrial Time-Variable Gravity Measurements. Rev. Geophys. 2017, 55, 938–992. [Google Scholar] [CrossRef]
- Huang, P.W.; Tang, B.; Chen, X.; Zhong, J.Q.; Xiong, Z.Y.; Zhou, L.; Wang, J.; Zhan, M.S. Accuracy and stability evaluation of the 85Rb atom gravimeter WAG-H5-1 at the 2017 International Comparison of Absolute Gravimeters. Metrologia 2019, 56, 045012. [Google Scholar] [CrossRef]
- Yang, R.; Song, Z.; Chen, L.; Gu, Y.; Xi, X. Assisted cold start method for GPS receiver with artificial neural network-based satellite orbit prediction. Meas. Sci. Technol. 2020, 32, 015101. [Google Scholar] [CrossRef]
- Bajpai, R.; Tomaru, T.; Yamamoto, K.; Ushiba, T.; Kimura, N.; Suzuki, T.; Yamada, T.; Honda, T. A laser interferometer accelerometer for vibration sensitive cryogenic experiments. Meas. Sci. Technol. 2022, 33, 085902. [Google Scholar] [CrossRef]
- Hinton, A.; Perea-Ortiz, M.; Winch, J.; Briggs, J.; Freer, S.; Moustoukas, D.; Powell-Gill, S.; Squire, C.; Lamb, A.; Rammeloo, C.; et al. A portable magneto-optical trap with prospects for atom interferometry in civil engineering. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2017, 375, 20160238. [Google Scholar] [CrossRef] [PubMed]
- Gabor, D. Theory of communication. Part 1: The analysis of information. Electrical Engineers Part III Radio & Communication. Eng. J. Inst. 1946, 93, 429–441. [Google Scholar]
- Mallat, S.A. Theory for multi-resolution signal decomposition wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Tang, B.P.; Jiang, Y.H.; Zhang, X. Feature extraction method of rolling bearing fault based on singular value decomposition-morphology filter and empirical mode decomposition. J. Mech. Eng. 2010, 46, 37–42. [Google Scholar] [CrossRef]
- Zhang, J.; Sang, H.; Zhao, S. EMD-based time–frequency denoising algorithm for the self-sensing of vibration signals in ultrasonic-assisted grinding. Meas. Sci. Technol. 2022, 33, 104004. [Google Scholar] [CrossRef]
- Zhong, C.; Wang, J.S.; Sun, W.Z. Fault diagnosis method of rotating bearing based on improved ensemble empirical mode decomposition and deep belief network. Meas. Sci. Technol. 2022, 33, 085109. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Ji, Z.; Wang, F.W. Short-term ship traffic flow prediction based on EEMD-PE-LSTM and visualization of channel traffic state. J. Dalian Marit. Univ. 2023, 49, 58–68. [Google Scholar]
- Yang, Z.Z.; Lin, J.Z.; Wang, K. De-noising of concrete acoustic emission signals based on CEEMD-wavelet packet adaptive threshold. J. Vib. Shock 2023, 42, 139–149. [Google Scholar]
- Lo, A.W.; MacKinlay, C. The size and power of the variance ratio test in finite samples. J. Econ. 1989, 40, 203–238. [Google Scholar] [CrossRef]
- Fisher, R.A.S.; Bennett, J.H. Statistical Methods, Experimental Design, and Scientific Inference; Oxford University Press: Oxford, UK, 1990. [Google Scholar]
- Fisher, R. On the ‘probable error’ of a coefficient of correlation deduced from a small sample. Metron 1920, 1, 3–32. [Google Scholar]
- Cui, C.R. A study on the parameterization of mesoscale wind stress induced feedback effect and its role in reducing the simulated SST warm bias in the western coast of South America. Inst. Oceanol. Chin. Acad. Sci. Univ. Chin. Acad. Sci. 2021, 39, 785–799. [Google Scholar]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Gilles, J. Empirical wavelet transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Trevor, H.; Robert, T.; Jerome, F. The Elements of Statistical Learning; Springer Press: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Yao, J.M.; Wu, K.; Guo, M.Y. An Ultralow-frequency active vertical vibration isolator with geometric anti-spring structure for absolute gravimetry. IEEE Trans. Instrum. Meas. 2020, 69, 2670–2677. [Google Scholar] [CrossRef]
- Hu, R.; Wu, S.Q.; Mou, Z.L.; Feng, J.Y.; Niu, X.B. Vibration characteristics of absolute gravimeter. J. Vib. Meas. Diagn. 2022, 42, 220–226+403. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ICEEMDAN +LOESS | CEEMDAN +LOESS | EEMD +LOESS | |
|---|---|---|---|
| SNR | 12.64 | 7.73 | 7.10 |
| RMSE | 0.28 | 0.43 | 0.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Li, A.; Qin, F.; Gong, W.; Che, H. ICEEMDAN/LOESS: An Improved Vibration-Signal Analysis Method for Marine Atomic Interferometric Gravimetry. J. Mar. Sci. Eng. 2024, 12, 302. https://doi.org/10.3390/jmse12020302
Ma J, Li A, Qin F, Gong W, Che H. ICEEMDAN/LOESS: An Improved Vibration-Signal Analysis Method for Marine Atomic Interferometric Gravimetry. Journal of Marine Science and Engineering. 2024; 12(2):302. https://doi.org/10.3390/jmse12020302
Chicago/Turabian StyleMa, Jinxiu, An Li, Fangjun Qin, Wenbin Gong, and Hao Che. 2024. "ICEEMDAN/LOESS: An Improved Vibration-Signal Analysis Method for Marine Atomic Interferometric Gravimetry" Journal of Marine Science and Engineering 12, no. 2: 302. https://doi.org/10.3390/jmse12020302
APA StyleMa, J., Li, A., Qin, F., Gong, W., & Che, H. (2024). ICEEMDAN/LOESS: An Improved Vibration-Signal Analysis Method for Marine Atomic Interferometric Gravimetry. Journal of Marine Science and Engineering, 12(2), 302. https://doi.org/10.3390/jmse12020302