

Research on a Marine Animal Behavior Recording Tag System Based on Combined Positioning and Recovery

 ,
,
Abstract
:1. Introduction
2. Architecture Design
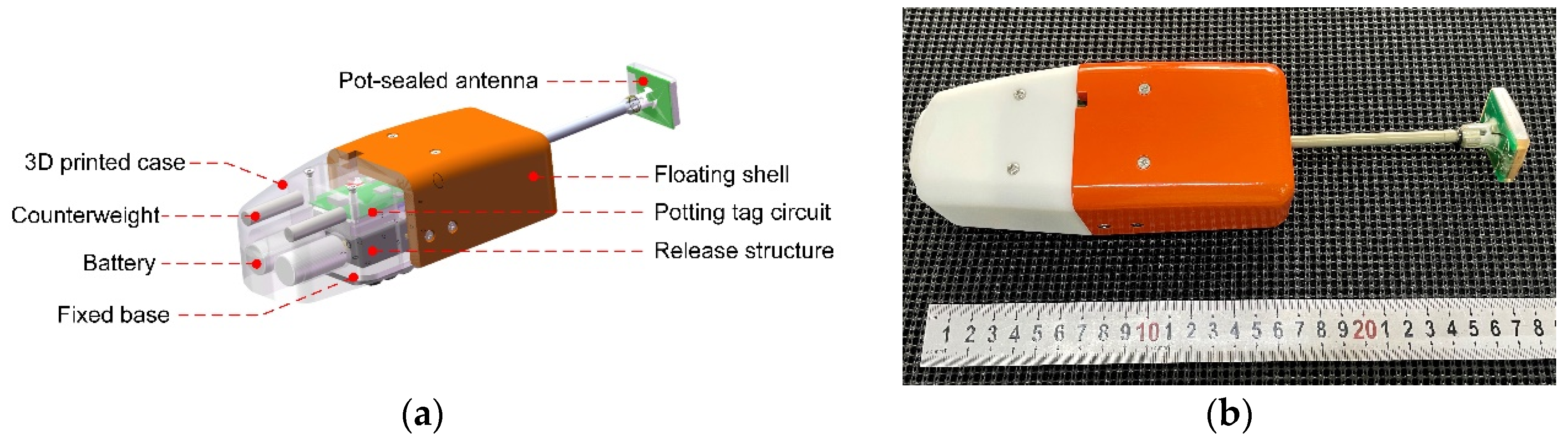
2.1. Tag Structure Design
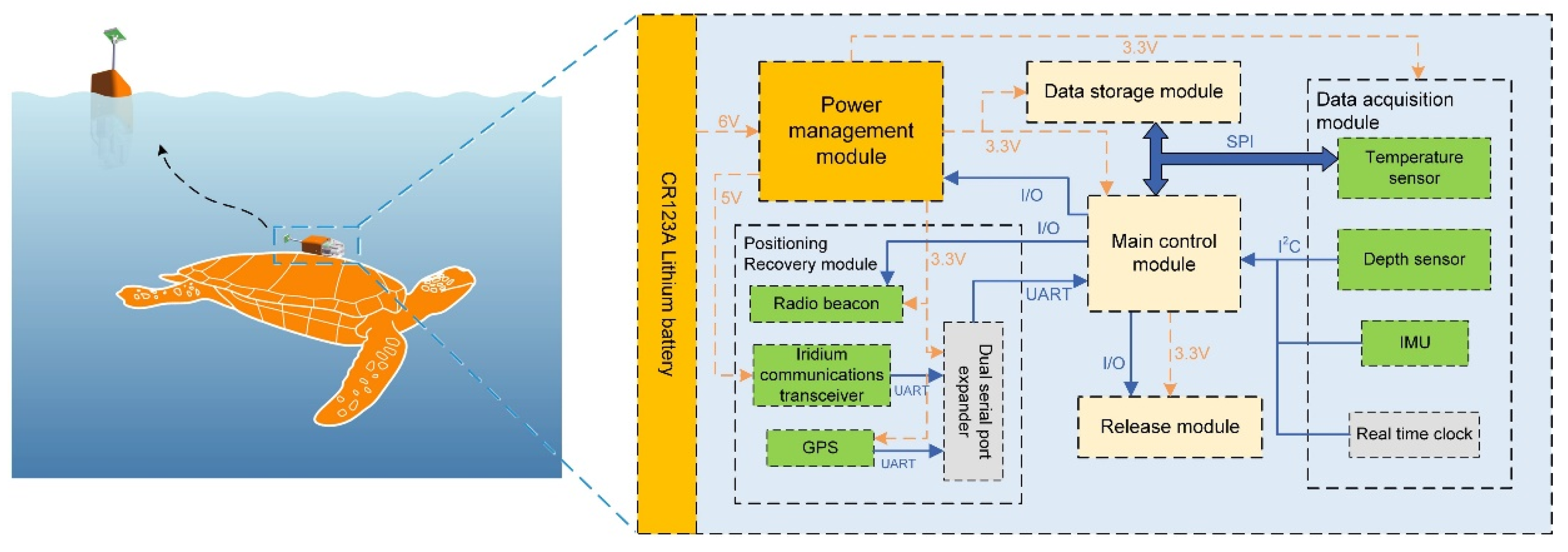
2.2. System Function Design
2.2.1. Power Management Module
2.2.2. Main Control Module and Data Storage Module
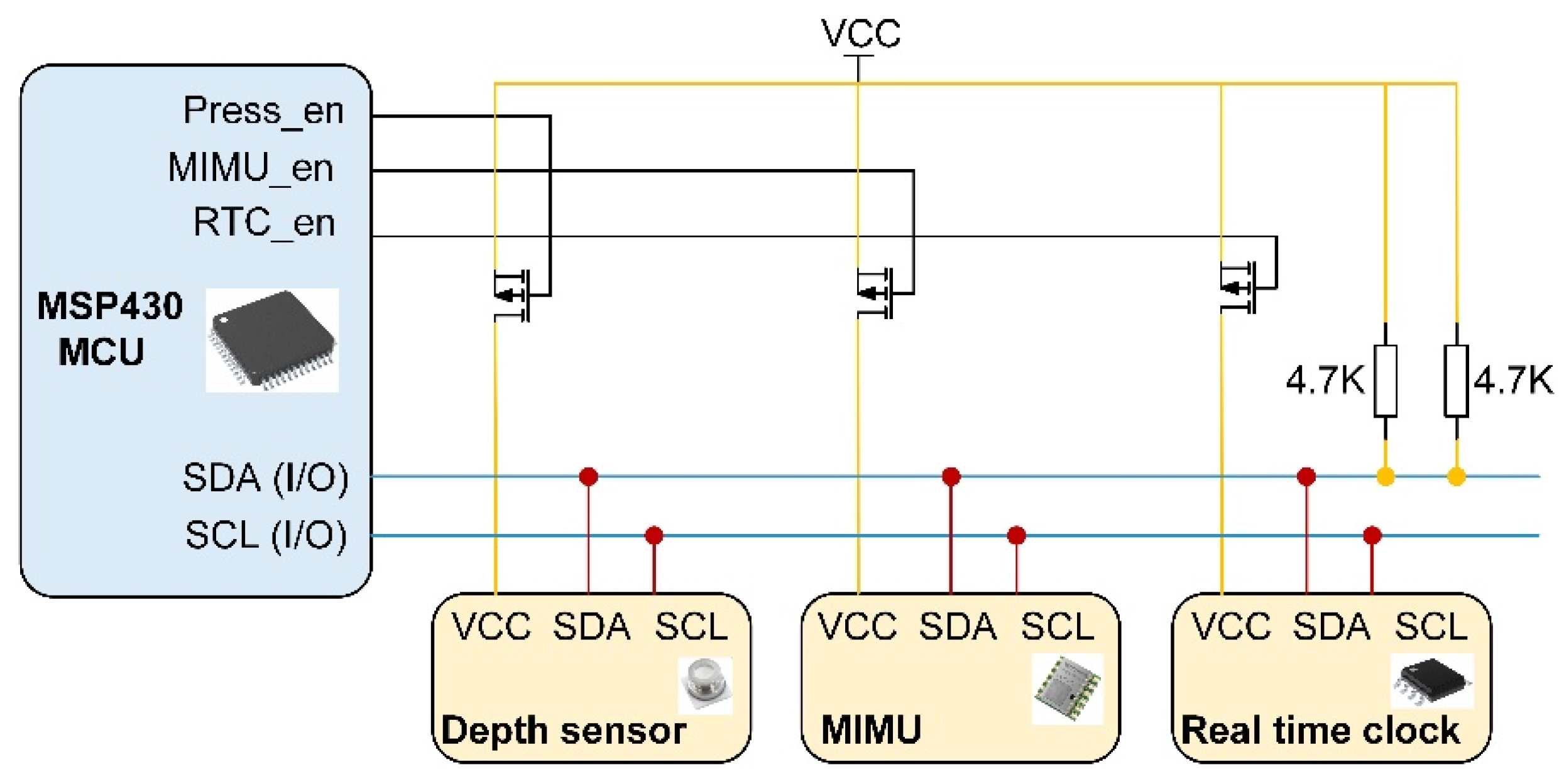
2.2.3. Data Collection Module
2.2.4. Release Module and Positioning Recovery Module
2.3. Embedded Software Design
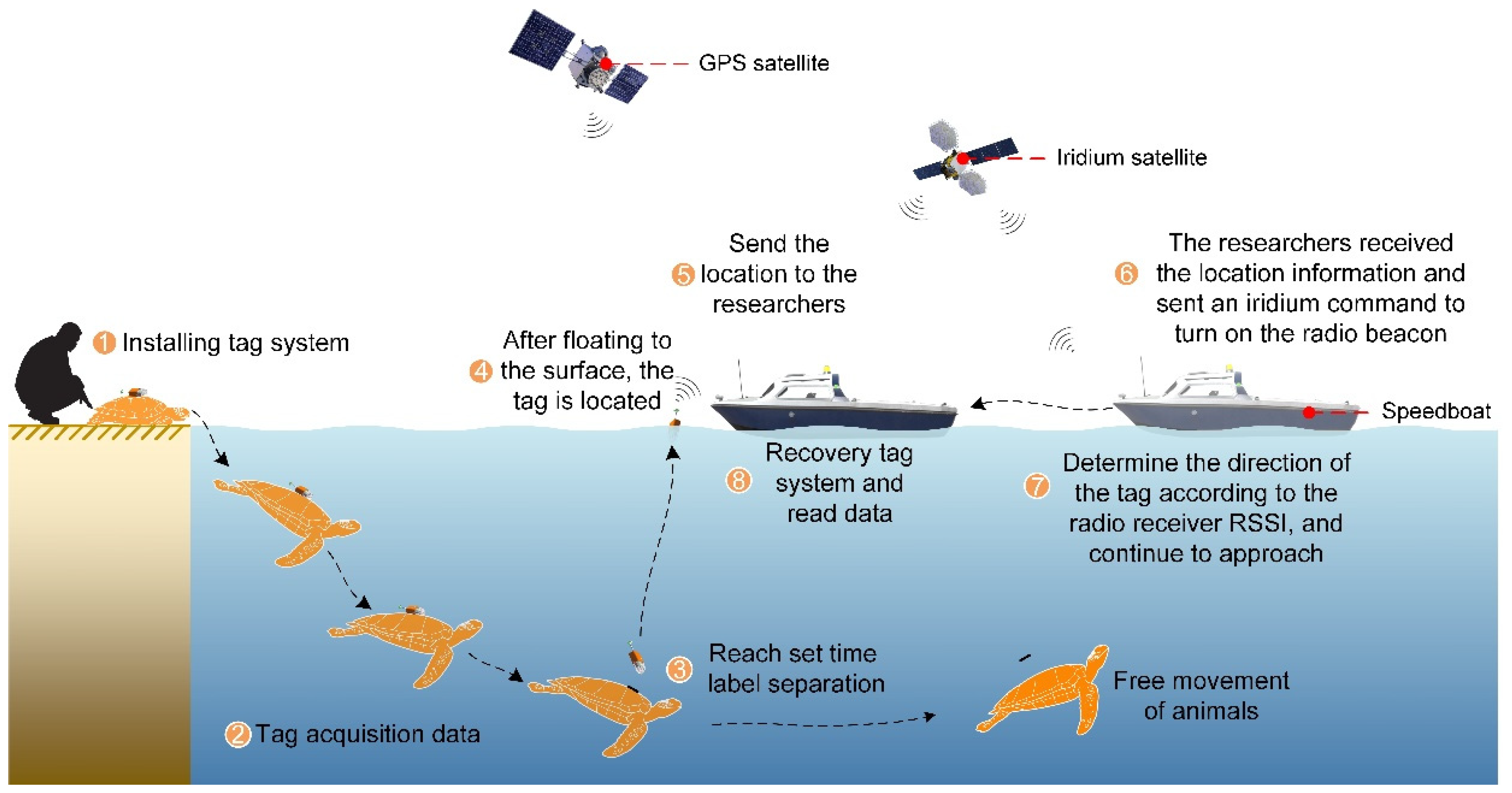
2.4. Workflow Design
3. Combined Positioning and Recovery Scheme
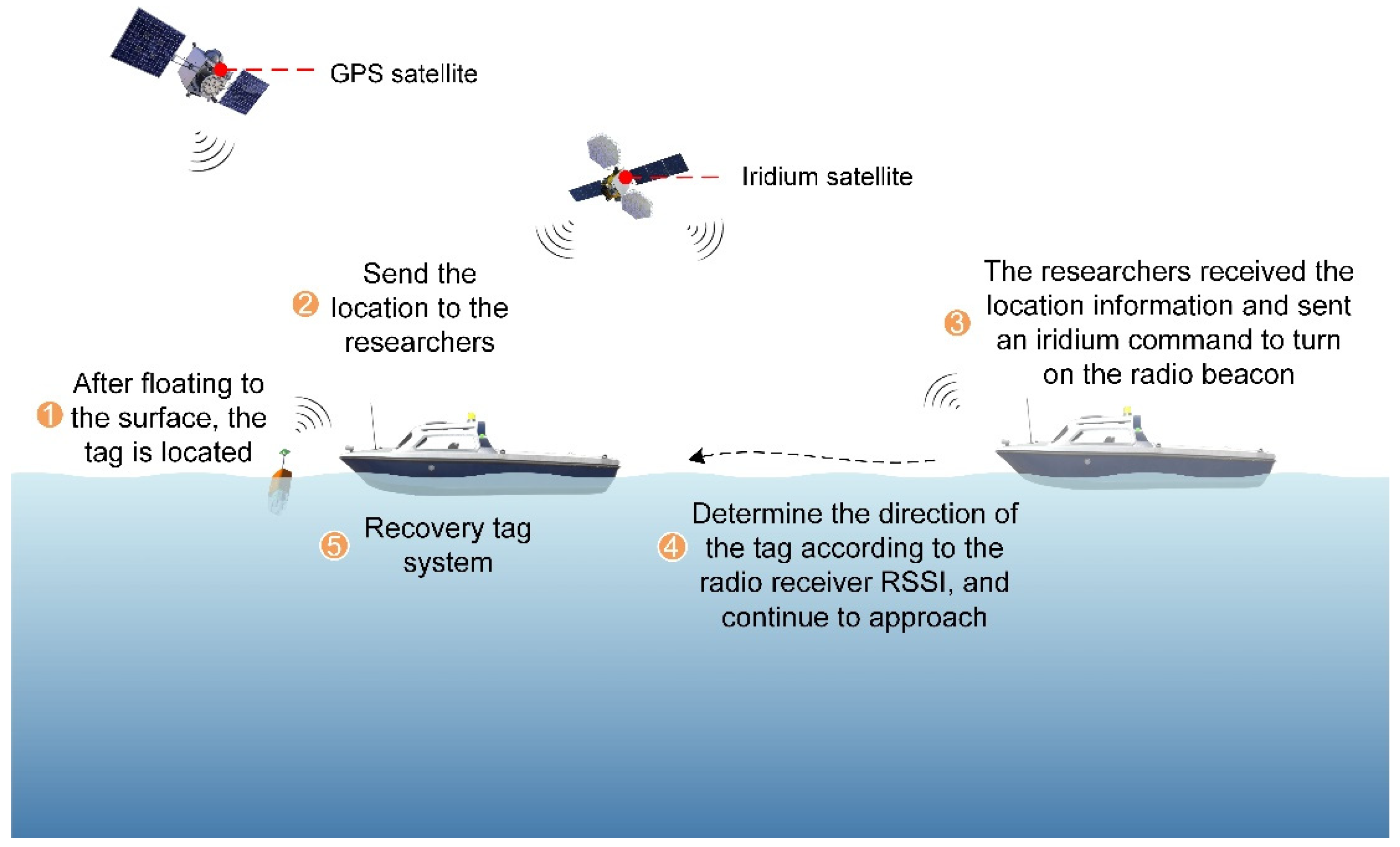
3.1. Scheme Design
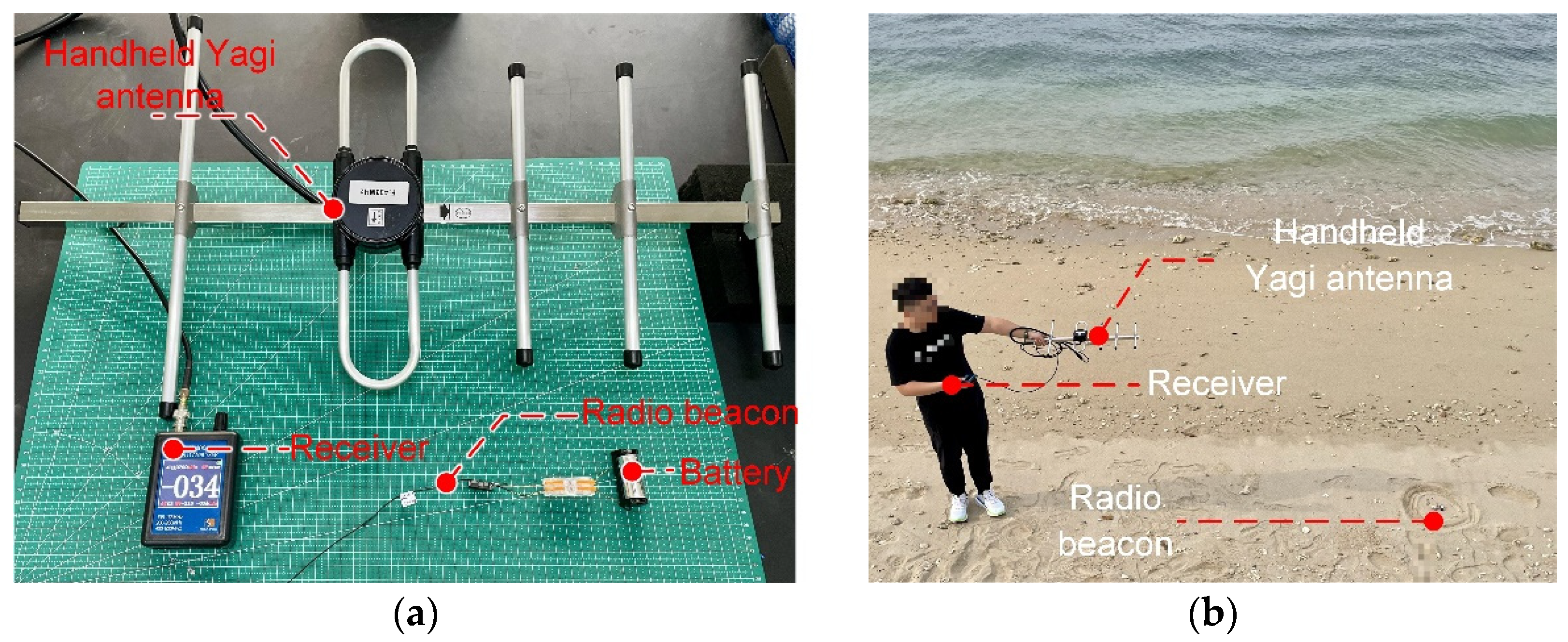
3.2. Hardware Design
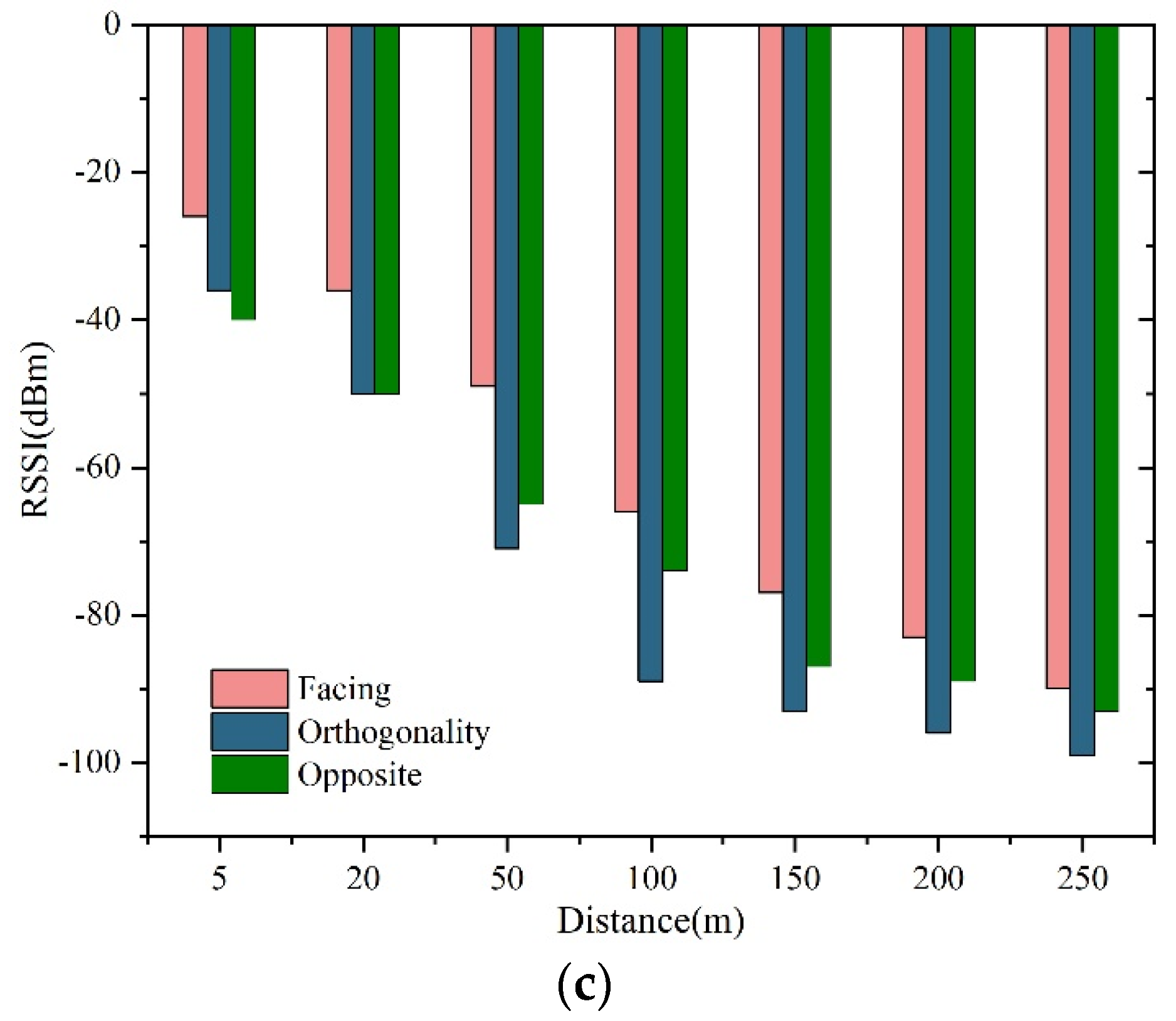
3.3. Testing and Evaluation
4. Experiment
4.1. Tag System Construction
4.2. System Performance Test
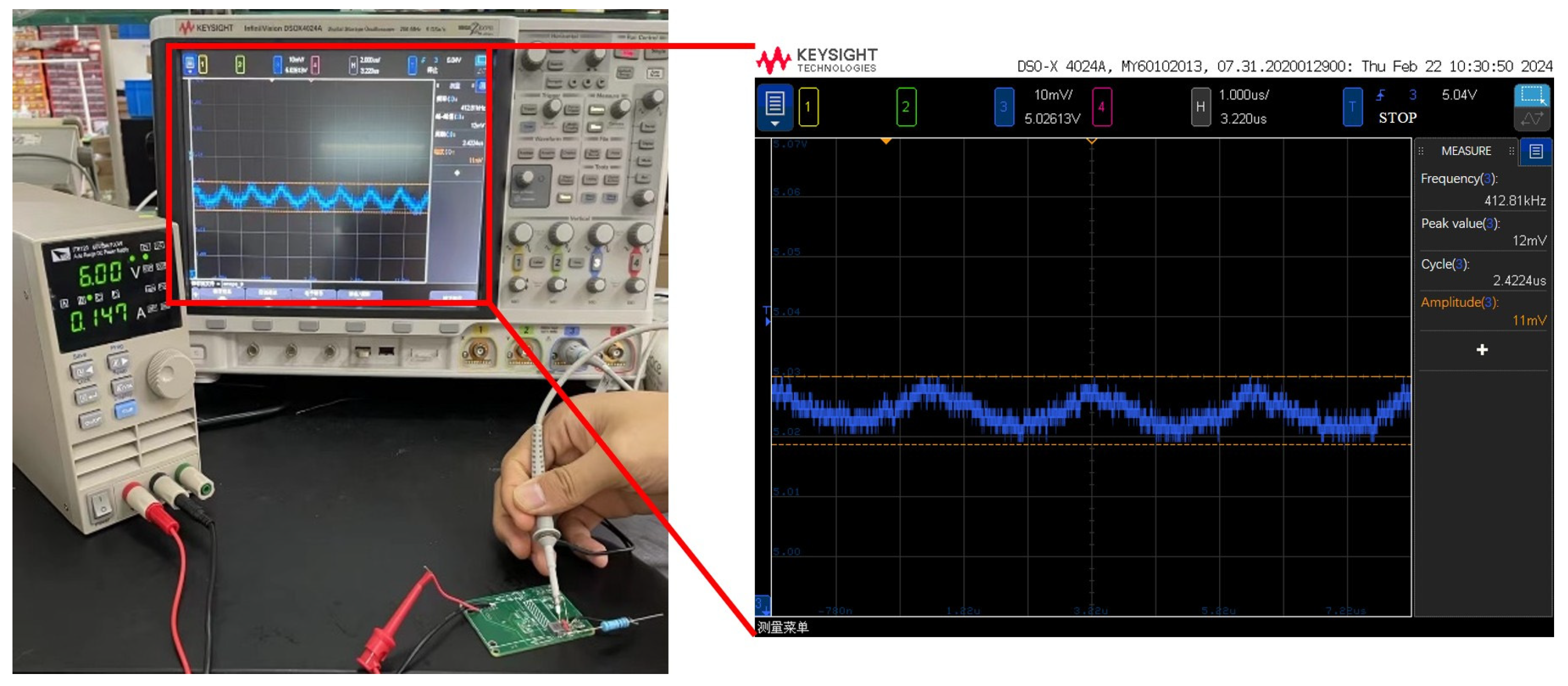
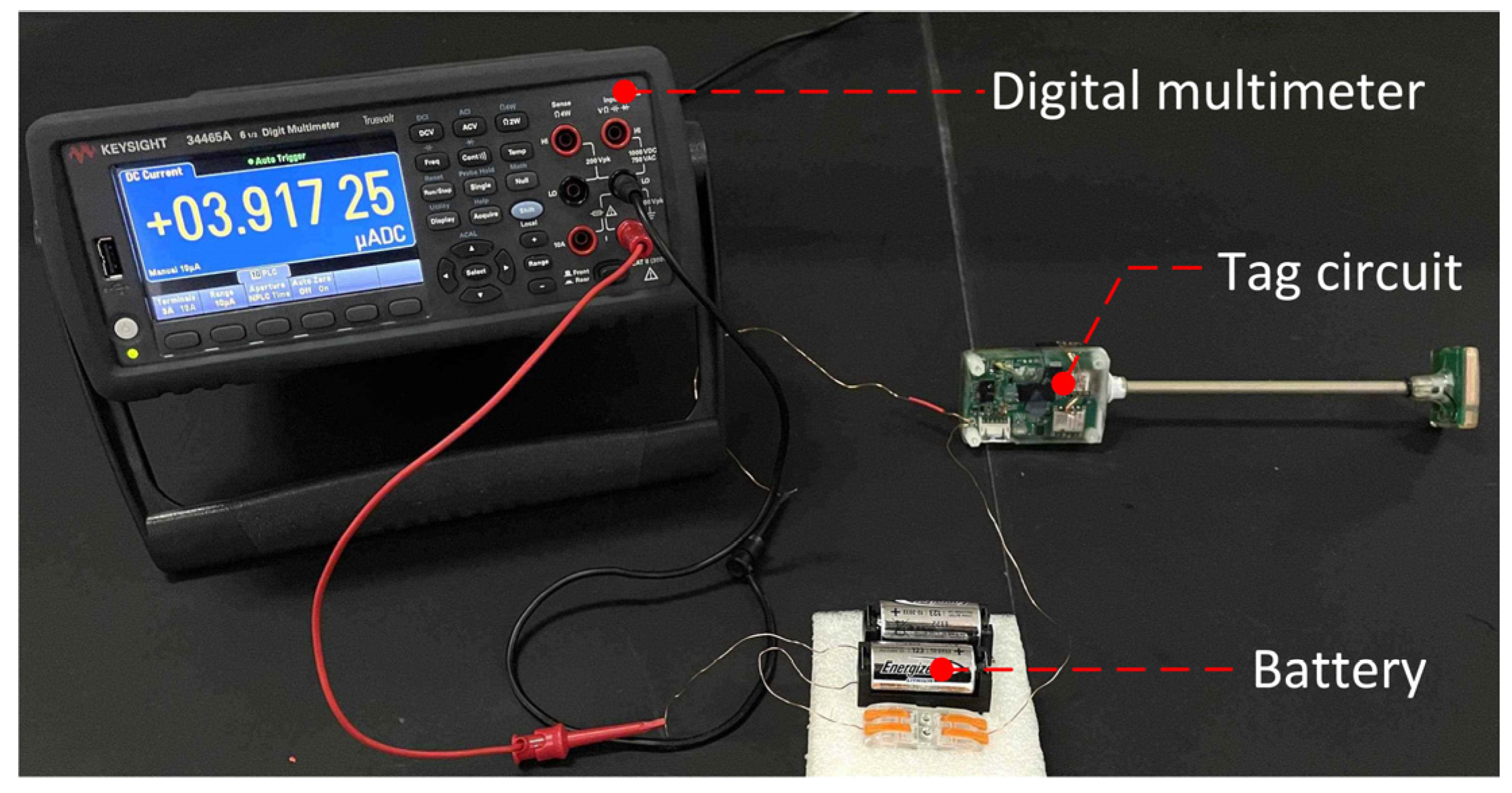
4.2.1. Power Consumption Test
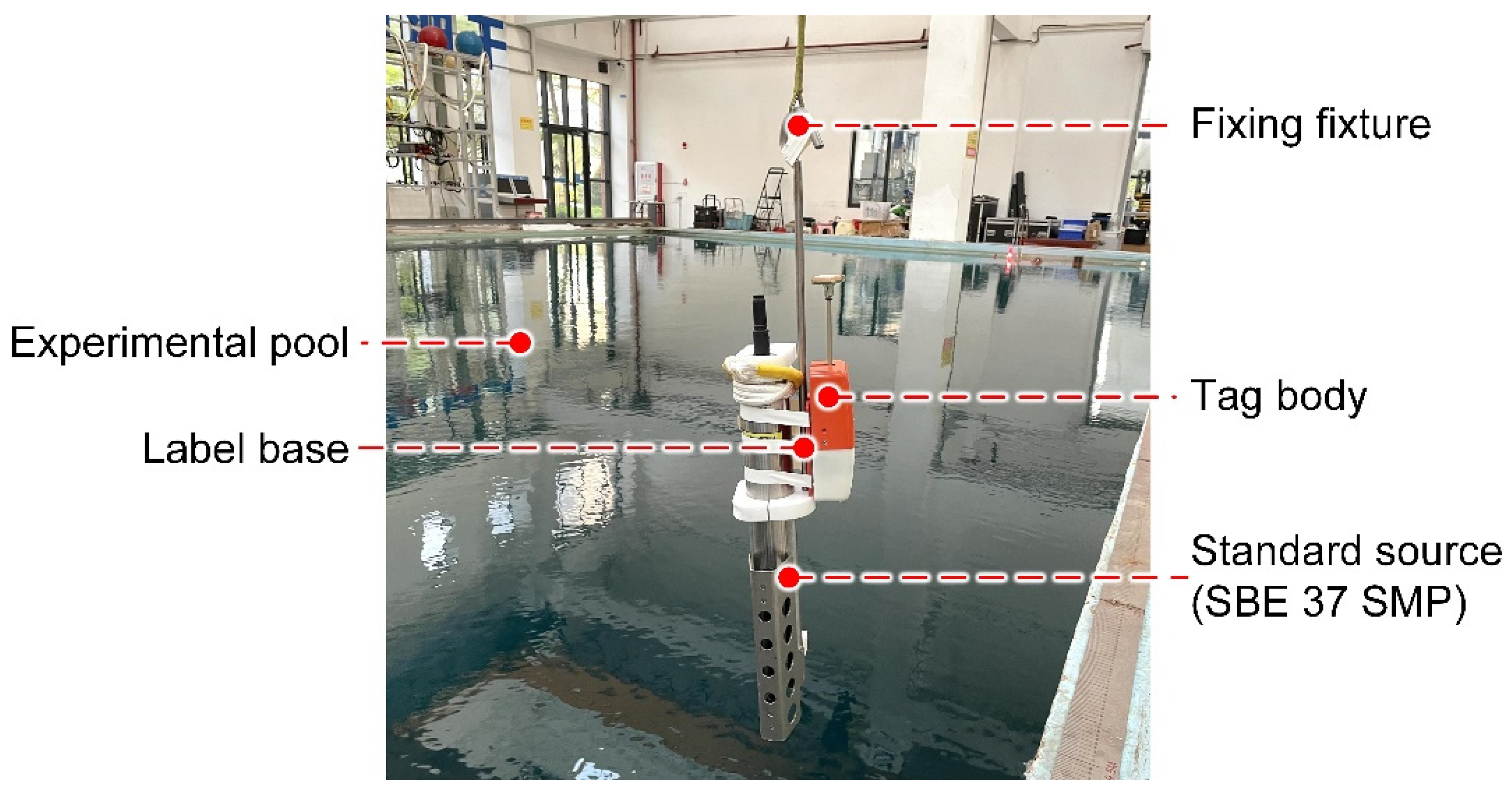
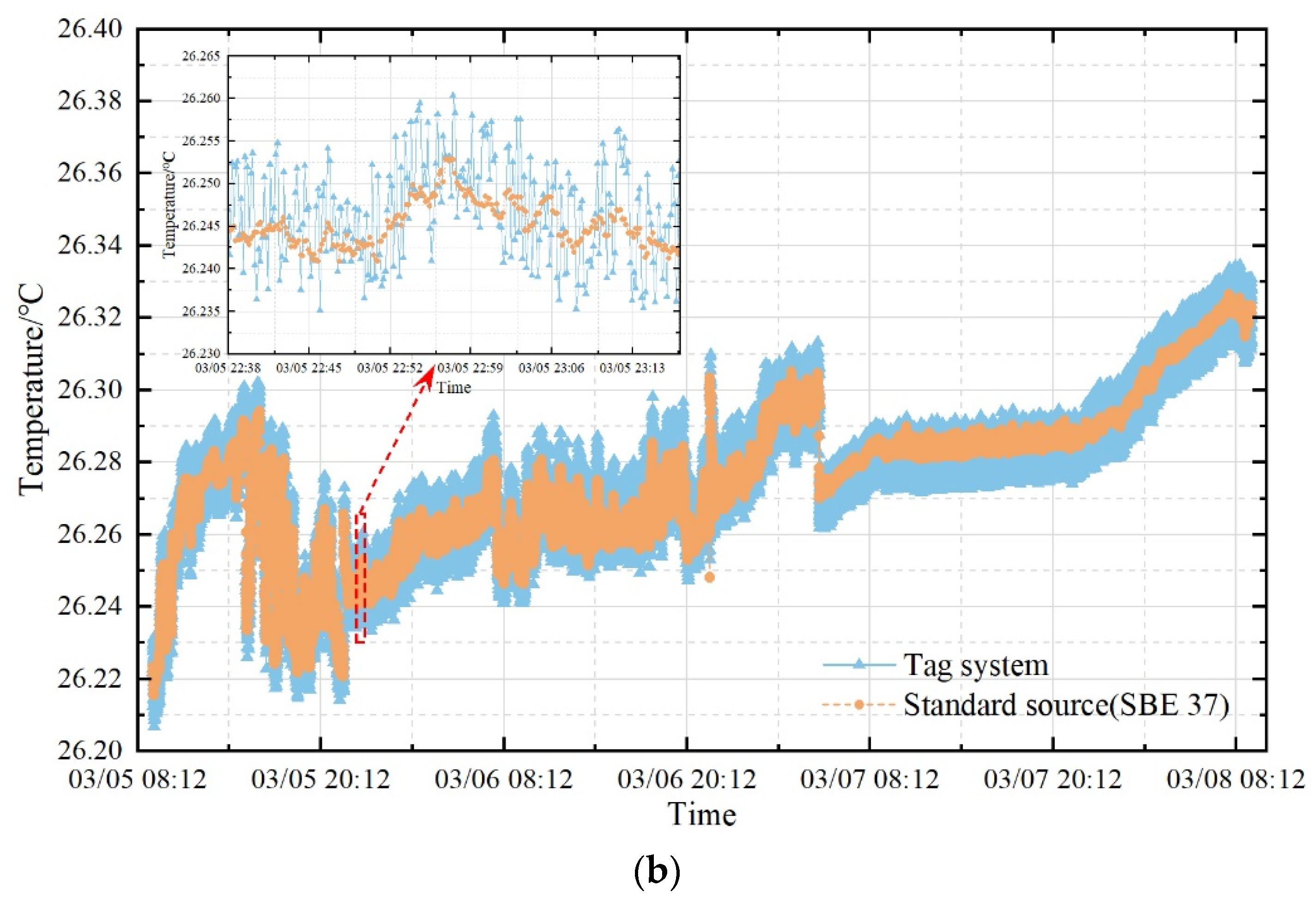
4.2.2. Temperature Performance Test
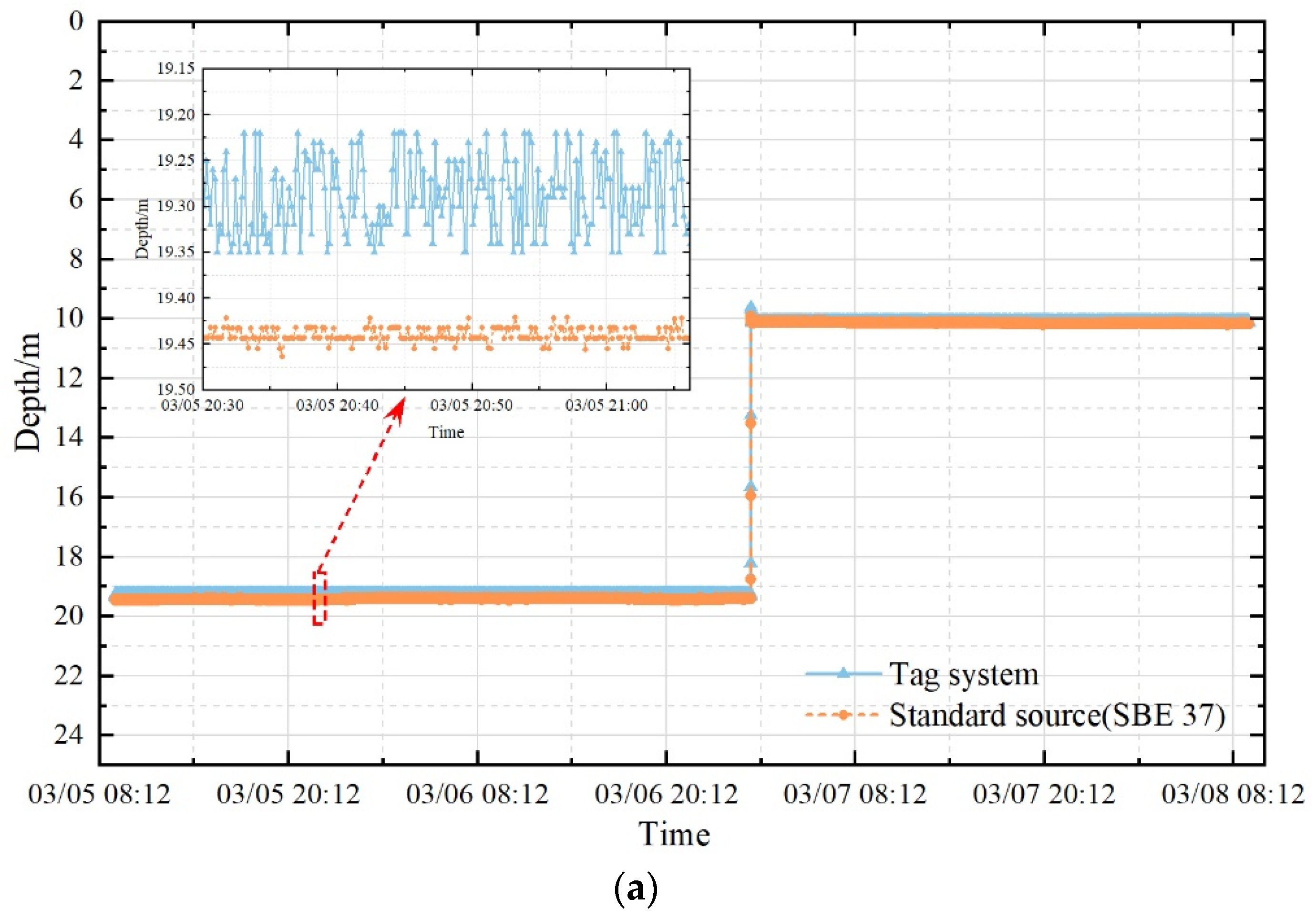
4.2.3. Pressure Performance Test
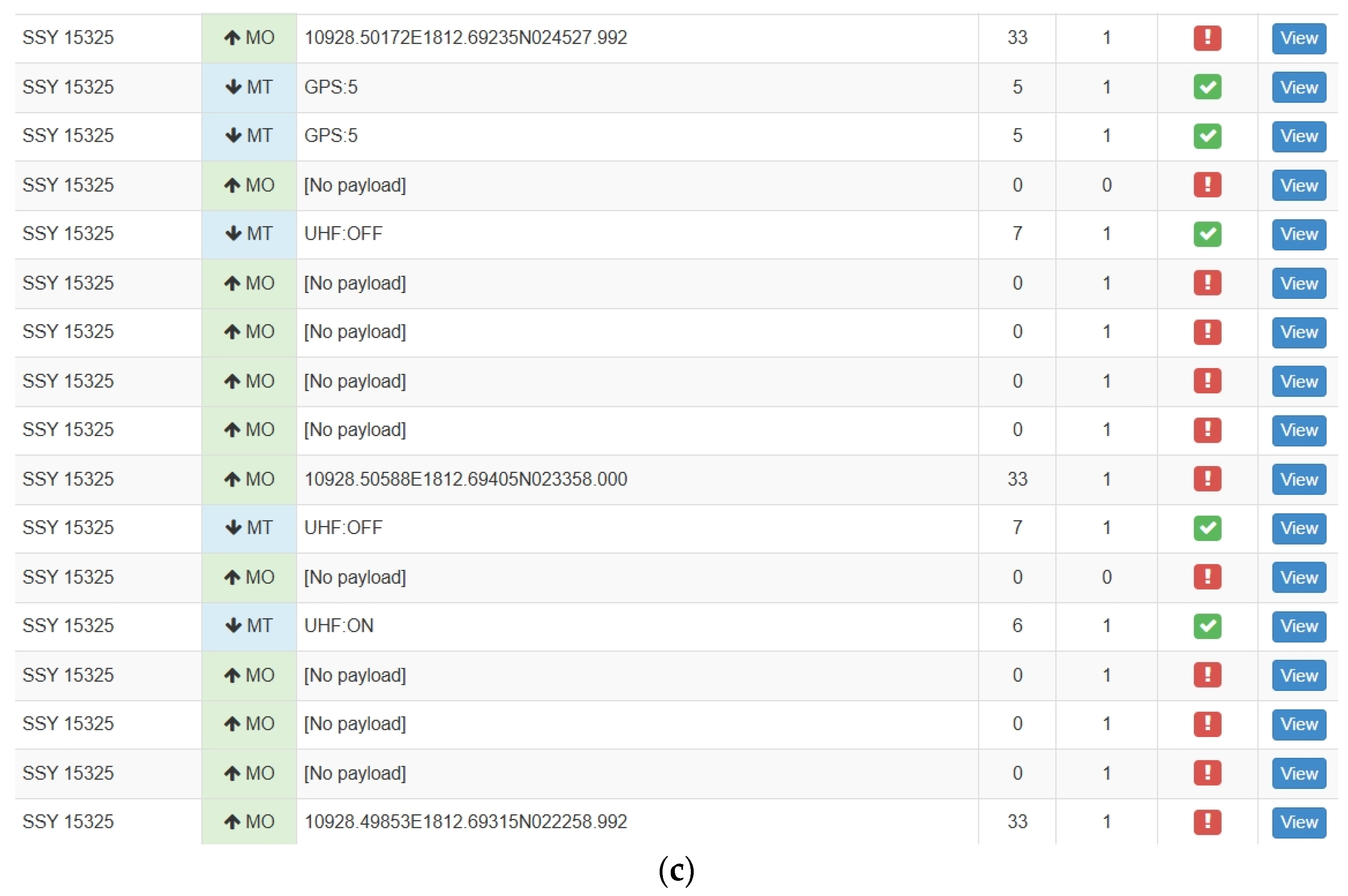
4.2.4. Iridium Communication Test
4.3. Submersion Trajectory Reconstruction Testing
4.4. Pool and Nearshore Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shillinger, G.L.; Bailey, H.; Bograd, S.J.; Hazen, E.L.; Hamann, M.; Gaspar, P.; Godley, B.J.; Wilson, R.P.; Spotila, J.R. Tagging through the stages: Technical and ecological challenges in observing life histories through biologging. Mar. Ecol. Prog. Ser. 2012, 457, 165–170. [Google Scholar] [CrossRef]
- Chung, H.; Lee, J.; Lee, W.Y. A Review: Marine Bio-logging of Animal Behaviour and Ocean Environments. Ocean. Sci J 2021, 56, 117–131. [Google Scholar] [CrossRef]
- Lennox, R.J.; Engler-Palma, C.; Kowarski, K.; Filous, A.; Whitlock, R.; Cooke, S.J.; Auger-Méthé, M. Optimizing marine spatial plans with animal tracking data. Can. J. Fish. Aquat. Sci. 2019, 76, 497–509. [Google Scholar] [CrossRef]
- Dong, L.; Liu, M.; Lin, W.; Li, S. First Suction Cup Tagging on a Small and Coastal Form Bryde’s Whale (Balaenoptera edeni edeni) in China to Investigate Its Dive Profiles and Foraging Behaviours. J. Mar. Sci. Eng. 2022, 10, 1422. [Google Scholar] [CrossRef]
- Rutz, C.; Hays, G.C. New frontiers in biologging science. Biol. Lett. 2009, 5, 289–292. [Google Scholar] [CrossRef] [PubMed]
- Wiley, D.N.; Zadra, C.J.; Friedlaender, A.S.; Parks, S.E.; Pensarosa, A.; Rogan, A.; Shorter, K.A.; Urbán, J.; Kerr, I. Deployment of biologging tags on free swimming large whales using uncrewed aerial systems. R. Soc. Open Sci. 2023, 10, 221376. [Google Scholar] [CrossRef]
- Martínez-Ramírez, L.; Bentes, L.; Dias, A.; Erzini, K.; Gandra, M.; Kraft, S.; Winkler, A.C.; Abecasis, D. Tagging mortality in acoustic telemetry studies: Insights from a multispecies analysis. J. Fish Biol. 2024, 1, 11. [Google Scholar] [CrossRef] [PubMed]
- Jackson, G.D.; O’Dor, R.K.; Andrade, Y. First tests of hybrid acoustic/archival tags on squid and cuttlefish. Mar. Freshw. Res. 2005, 56, 425–430. [Google Scholar] [CrossRef]
- MacGregor, K.A.; Lavoie, M.-F.; Robinson, S.M.C.; Simard, E.; McKindsey, C.W. Lab and field evaluation of tagging methods for the use of acoustic telemetry to observe sea urchin movement behaviour at ecologically relevant spatio-temporal scales. Anim. Biotelemetry 2023, 11, 3. [Google Scholar] [CrossRef]
- Goldbogen, J.A.; Cade, D.E.; Boersma, A.T.; Calambokidis, J.; Kahane-Rapport, S.R.; Segre, P.S.; Stimpert, A.K.; Friedlaender, A.S. Using Digital Tags with Integrated Video and Inertial Sensors to Study Moving Morphology and Associated Function in Large Aquatic Vertebrates. Anat. Rec.-Adv. Integr. Anat. Evol. Biol. 2017, 300, 1935–1941. [Google Scholar] [CrossRef]
- Boehme, L.; Lovell, P.; Biuw, M.; Roquet, F.; Nicholson, J.; Thorpe, S.E.; Meredith, M.P.; Fedak, M. Technical Note: Animal-borne CTD-Satellite Relay Data Loggers for real-time oceanographic data collection. Ocean. Sci. 2009, 5, 685–695. [Google Scholar] [CrossRef]
- Fedak, M.A. The impact of animal platforms on polar ocean observation. Deep.-Sea Res. Part Ii-Top. Stud. Oceanogr. 2013, 88–89, 7–13. [Google Scholar] [CrossRef]
- Deng, Z.D.; Carlson, T.J.; Li, H.; Xiao, J.; Myjak, M.J.; Lu, J.; Martinez, J.J.; Woodley, C.M.; Weiland, M.A.; Eppard, M.B. An injectable acoustic transmitter for juvenile salmon. Sci. Rep. 2015, 5, 8111. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Dai, Y.; Yang, S.; Wang, X.; Liu, G.; Chen, X. Vertical movement characteristics of tuna (Thunnus albacares) in Pacific Ocean determined using pop-up satellite archival tags. Trans. Chin. Soc. Agric. Eng. 2014, 30, 196–203. [Google Scholar]
- Geng, Z.; Feng, G.-P.; Zhao, F.; Zhang, T.; Yang, G.; Zhuang, P. The application of ultrasonic telemetry in the study of spawning ground of Eriocheir sinensis. Chin. J. Ecol. 2018, 37, 3795–3801. [Google Scholar]
- Liu, M.; Lin, W.; Lin, M.; Liu, B.; Dong, L.; Zhang, P.; Yang, Z.; Wang, K.; Dai, L.; Li, S. The First Attempt of Satellite Tracking on Occurrence and Migration of Bryde’s Whale (Balaenoptera edeni) in the Beibu Gulf. J. Mar. Sci. Eng. 2021, 9, 796. [Google Scholar] [CrossRef]
- O’Sullivan, J.; Lowe, C.G.; Sosa-Nishizaki, O.; Jorgensen, S.J.; Anderson, J.M.; Farrugia, T.J.; García-Rodríguez, E.; Lyons, K.; McKinzie, M.K.; Oñate-González, E.C.; et al. A biologging database of juvenile white sharks from the northeast Pacific. Sci. Data 2022, 9, 142. [Google Scholar] [CrossRef] [PubMed]
- Skubel, R.A.; Wilson, K.; Papastamatiou, Y.P.; Verkamp, H.J.; Sulikowski, J.A.; Benetti, D.; Hammerschlag, N. A scalable, satellite-transmitted data product for monitoring high-activity events in mobile aquatic animals. Anim. Biotelemetry 2020, 8, 34. [Google Scholar] [CrossRef]
- Goossens, J.; Woillez, M.; LeBris, A.; Verhelst, P.; Moens, T.; Torreele, E.; Reubens, J. Acoustic and archival technologies join forces: A combination tag. Methods Ecol. Evol. 2023, 14, 860–866. [Google Scholar] [CrossRef]
- McKenna, J.E.; Sethi, S.A.; Scholten, G.M.; Kraus, J.; Chalupnicki, M. Acoustic tag retention and tagging mortality of juvenile cisco Coregonus artedi. J. Great Lakes Res. 2021, 47, 937–942. [Google Scholar] [CrossRef]
- Kume, M.; Takagi, J.; Dantsuji, Y.; Ito, T.; Yamashita, Y.; Mitamura, H.; Wada, T. Tagging of age-0 flatfish with acoustic transmitters: Comparison of internal implantation versus external attachment. Environ. Biol. Fishes 2023, 106, 2011–2019. [Google Scholar] [CrossRef]
- Ma, F.; Lu, T.; Zhang, H. Design of Beidou and Iridium dual-mode communication system for smart float. Transducer Microsyst. Technol. 2021, 40, 107–110. [Google Scholar]
- Kennedy, D.; Cullen, E.; McNulty, R.; Gaffney, M.; Walsh, M.; O’Flynn, B. Marine Inertial Measurement Units: Communication, Capabilities, and Challenges. Mar. Technol. Soc. J. 2015, 49, 56–63. [Google Scholar] [CrossRef]
- Hao, X.; Tanaka, S.; Masuda, A.; Nakamura, J.; Sudoh, K.; Maenaka, K.; Takao, H.; Higuchi, K. Application of Silicon on Nothing Structure for Developing a Novel Capacitive Absolute Pressure Sensor. IEEE Sens. J. 2014, 14, 808–815. [Google Scholar] [CrossRef]
- Weaver, S.J.; Westphal, M.F.; Taylor, E.N. Technology wish lists and the significance of temperature-sensing wildlife telemetry. Anim. Biotelemetry 2021, 9, 29. [Google Scholar] [CrossRef]
- Gaspar, P.; Georges, J.-Y.; Fossette, S.; Lenoble, A.; Ferraroli, S.; Le Maho, Y. Marine animal behaviour: Neglecting ocean currents can lead us up the wrong track. Proc. R. Soc. B-Biol. Sci. 2006, 273, 2697–2702. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Tan, N.; Xiao, X.; Xia, J.; Hu, W.; Ding, Y. Design and UVM Verification of an RTC Subsystem with Temperature Compensation. In Proceedings of the 2021 6th International Conference on Integrated Circuits and Microsystems (Icicm 2021), Nanjing, China, 22–24 October 2021; IEEE: Picsataway, NJ, USA, 2021; pp. 384–389. [Google Scholar] [CrossRef]
- Chi, Y.; Zheng, Z. A Design of Real-Time Clock for Wireless Communication SoC in Smart Grid. In Proceedings of the 14th International Conference on Wireless Communications, Networking and Mobile Computing (Wicom 2018), Chongqing, China, 18–20 September 2018; Destech Publications Inc.: Lancaster, PA, USA, 2018; 306, pp. 331–340. [Google Scholar]
- Meynecke, J.-O.; Liebsch, N. Asset Tracking Whales-First Deployment of a Custom-Made GPS/GSM Suction Cup Tag on Migrating Humpback Whales. J. Mar. Sci. Eng. 2021, 9, 597. [Google Scholar] [CrossRef]
- Wu, Z.; Mao, M.; Xiong, J.; Zhao, Z.; Yuan, K. Dynamic Phase Comparison Planar Direction-Finding Algorithm on Satellite Radio Receiver. Appl. Sci. -Basel 2024, 14, 3400. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Module Number | Maximum Error (m) | Mean Error (m) |
|---|---|---|---|
| A | GPS-001 | 20.7 | 7.8 |
| GPS-002 | 38.1 | 6.5 | |
| GPS-003 | 14.6 | 4.6 | |
| B | GPS-003 | 14.6 | 4.6 |
| GPS-003 | 14.6 | 4.6 | |
| GPS-003 | 14.6 | 4.6 | |
| C | GPS-001 | 15.8 | 6.5 |
| GPS-002 | 14.5 | 6.7 | |
| GPS-003 | 8.3 | 4.9 | |
| D | GPS-001 | 21.5 | 6.3 |
| GPS-002 | 9.4 | 4.5 | |
| GPS-003 | 21.0 | 6.4 | |
| E | GPS-001 | 25.7 | 7.8 |
| GPS-002 | 12.7 | 6.3 | |
| GPS-003 | 31.5 | 7.8 |
| Sleep | Standby | Data Acquisition Storage | Release Capacitance Charging | GPS | Iridium Communication | Radiolocation | Total | |
|---|---|---|---|---|---|---|---|---|
| Working current | 3.9 μA | 393.3 μA | 12.7 mA | 66 mA | 29.5 mA | 38.2 mA | 45 mA | — |
| Total duration | 168 h | 24 h | 72 h | 0.011 h | 0.5 h | 6.67 h | 0.643 h | — |
| Total power consumption | 0.7 mAh | 9.4 mAh | 914.4 mAh | 0.7 mAh | 14.8 mAh | 254.8 mAh | 28.9 mAh | 1223.7 mAh |
| Standard Source (°C) | System Temperature (°C) | Indication Error (°C) |
|---|---|---|
| 35.0023 | 35.0052 | 0.0029 |
| 30.0042 | 29.9956 | −0.0086 |
| 25.0002 | 24.9961 | −0.0041 |
| 19.9963 | 20.0036 | 0.0073 |
| 14.9978 | 14.9918 | −0.0060 |
| 9.9968 | 10.0039 | 0.0071 |
| 1.0018 | 1.0068 | 0.0050 |
| Standard Pressure Value (mbar) | Sensor Probe Pressure Value (mbar) | Indication Error (mbar) | Percentage Error (%) |
|---|---|---|---|
| 491 | 527 | 36 | 0.12 |
| 5037 | 5056 | 19 | 0.06 |
| 11,686 | 11,656 | 30 | 0.10 |
| 15,123 | 15,163 | 40 | −0.13 |
| 20,095 | 20,019 | 76 | −0.25 |
| 25,223 | 25,298 | 75 | −0.25 |
| 30,111 | 30,237 | 126 | 0.42 |
| Test Content | Data Index |
|---|---|
| Iridium send times | 261 |
| Number of successful sends | 222 |
| Iridium communication success rate | 85.1% |
| GPS acquisition times | 37 |
| Charge floating range | 5.9–5.2 V |
| Source | Sensor type and Measurement Accuracy | Body Size (mm) | Recovery Mode |
|---|---|---|---|
| MiniPAT (Wildlife Computers Inc. Redmond, WA, USA) | temperature (±0.1 °C), pressure (±1% FS), light intensity (<5 × 10−2 W·cm−2), acceleration (±0.15 g) | 118 × 38 × 38 | Argos + radio beacon |
| SPLASH-F (Wildlife Computers Inc.) | temperature (±0.1 °C), pressure (±1.25% FS), dry and wet sensors, Fastloc GPS | - | Unrecyclable |
| CATS (CATS Inc., Tokyo, Japan) | temperature, pressure, camera, MIMU, light intensity, Fastloc GPS | 245 × 90 × 50 | Argos + radio beacon |
| DTAG-3 (WHOI, Falmouth, MA, USA) | pressure, acceleration, magnetic field strength, hydrophone | 171 × 102 × 58 | Argos + radio beacon |
| This paper | temperature (±0.1 °C), pressure (±0.5% FS), MIMU | 160 × 70 × 53 | GPS + Iridium communication + radio beacon |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, C.; Shen, S.; Sun, Z.; Xu, D.; Luo, P.; Song, Y.; Wang, Z.; Wang, C.; Zhang, S.; Shen, C. Research on a Marine Animal Behavior Recording Tag System Based on Combined Positioning and Recovery. J. Mar. Sci. Eng. 2024, 12, 2292. https://doi.org/10.3390/jmse12122292
Tian C, Shen S, Sun Z, Xu D, Luo P, Song Y, Wang Z, Wang C, Zhang S, Shen C. Research on a Marine Animal Behavior Recording Tag System Based on Combined Positioning and Recovery. Journal of Marine Science and Engineering. 2024; 12(12):2292. https://doi.org/10.3390/jmse12122292
Chicago/Turabian StyleTian, Chuan, Shiyao Shen, Zejin Sun, Dazhen Xu, Peng Luo, Yuanjie Song, Zhentong Wang, Chen Wang, Shengzong Zhang, and Chong Shen. 2024. "Research on a Marine Animal Behavior Recording Tag System Based on Combined Positioning and Recovery" Journal of Marine Science and Engineering 12, no. 12: 2292. https://doi.org/10.3390/jmse12122292
APA StyleTian, C., Shen, S., Sun, Z., Xu, D., Luo, P., Song, Y., Wang, Z., Wang, C., Zhang, S., & Shen, C. (2024). Research on a Marine Animal Behavior Recording Tag System Based on Combined Positioning and Recovery. Journal of Marine Science and Engineering, 12(12), 2292. https://doi.org/10.3390/jmse12122292