3.1. Simulated Wave Surface Retrieval
The model proposed in this study is compared against the traditional Pix2Pix model and the CNNSA model. The Pix2Pix model serves as the baseline, representing the original, unenhanced version, while the CNNSA model, introduced by Zuo et al. [
23], provides an additional benchmark for evaluation.
An error analysis formula, derived from
Section 2.3, is applied to compute error statistics using the test set data, which is categorized by sea state. The retrieval errors for each model are summarized in
Table 5.
Based on the data presented in
Table 5, it is evident that under four different sea state conditions, the proposed Atten-Pix2Pix model achieves the lowest MSE values and the highest PSNR values. Additionally, the SSIM metric approaches its ideal value of 1, underscoring the model’s exceptional performance across these evaluation metrics. In contrast, the CNNSA model demonstrates inferior performance compared to both competing models in all three metrics, highlighting its limitations for retrieval tasks. These shortcomings are particularly pronounced under level 6 sea state conditions.
For further analysis, the two vertical components,
and
, of the wave number vector are derived using the Quadratic Fourier Transform of both the original wave surface and the wave surface reconstructed by the proposed model. To facilitate a comprehensive comparison of wave number spectra across sea states three to six, wave number spectrum images are generated by normalizing the two vertical components with respect to the input spectral peak wave number,
, as illustrated in
Figure 11.
Additionally, a pixel-wise difference analysis is conducted between the reconstructed and original images, focusing on the relative height discrepancies between the predicted values and the actual measurements. The results are obtained by first simulating an idealized 3D wave surface using the methodology described in
Section 2.1.1. Subsequently, modulated radar images are simulated using the principles in
Section 2.1.2 to represent X-band marine radar images. These modulated radar images are then used as input to the Atten-Pix2Pix model, which performs retrieval to reconstruct the 3D wave surface. Finally, the reconstructed wave surface is compared against the idealized 3D wave surface using quantitative metrics to evaluate the model’s performance and accuracy. The results of this pixel-wise difference analysis are depicted in
Figure 12.
In the wave number spectrum of level 3 sea states (
Figure 11a), the overall fitting performance of the reconstructed wave surface meets expectations, demonstrating a high level of accuracy. Notably, the fitting accuracy within the wave number concentration region is exceptionally high. Additionally, the fitting results in the scattered wave number regions are generally satisfactory, though occasional data gaps are observed.
Under level 3 sea state conditions (
Figure 12a), the relative height difference between the predicted wave surface and the original wave surface remains within a range of ±0.2 m. Near the radar center, this relative height difference approaches zero, while in regions farther from the radar center, both the frequency and magnitude of relative differences are minimal. A comprehensive analysis of elevation differences across all sea states indicates that the relative errors are smallest in sea state level 3, leading to enhanced prediction accuracy under these conditions.
In the wave number spectrum of the level 4 sea state (
Figure 11b), the generated data exhibit a high degree of correlation with the original dataset, particularly in regions with concentrated wave number energy. However, in areas with lower wave numbers and sparse energy, the fitting performance is less accurate, leading to some missing data points. Despite this limitation, the overall representation of the wave surface remains largely unaffected, and the fitting results are deemed satisfactory.
As shown in
Figure 12b, the relative height difference between the generated wave surface and the original wave surface is maintained within a range of ±0.3 m. Near the radar center, this difference is predominantly positive, while a mix of positive and negative differences is observed in regions farther from the radar center, resulting in slightly increased variation overall.
In the wave number spectrum of the level 5 sea state (
Figure 11c), the overall fitting performance of the wave surface meets expectations and demonstrates commendable accuracy. This is particularly evident in the concentrated wave number region, where the fitting results are highly effective.
At sea state level 5 (
Figure 12c), the relative error between the generated wave surface and the original wave surface is predominantly observed in regions farther from the radar center, with some pixel points exhibiting an error range within ±0.7 m. This phenomenon can be attributed to the increased complexity of the sea state conditions and the inherent randomness in data selection, both of which contribute to the observed variations.
In the wave number spectrum of the level 6 sea state (
Figure 11d), the overall predictive fitting of the wave surface demonstrates a relatively high degree of accuracy. In regions where wave number energy is concentrated, the generated image closely aligns with the original image, achieving a highly accurate fitting effect. Conversely, in areas with scattered wave numbers, the fitting performance is less satisfactory, with some discrepancies observed. However, these discrepancies are minimal compared to those in concentrated regions, resulting in an overall commendable fitting performance.
At sea state level 6 (
Figure 12d), the total wave height exhibits significant variation over a relatively wide range. Within the radar scan area, error distributions are observed, with the error range constrained to ±1.0 m. This variation can be attributed to two primary factors. First, the generation of linear waves involves inherent randomness, leading to individual data points that may not fully represent the overall characteristics of the dataset. Second, the higher effective wave height and increased complexity typical of level 6 sea states contribute to the observed discrepancies.
A longitudinal comparison of the wave number spectrum across different sea states reveals that the accuracy of the fit between the generated images and the original images progressively decreases with increasing sea state severity. This trend is observed in both regions of concentrated and sparse energy. Nonetheless, within each individual sea state, the model demonstrates commendable predictive capability, maintaining errors within an acceptable range.
Similarly, a longitudinal analysis of wave surface differences indicates that as the sea state intensifies, the discrepancies between the generated and original wave surfaces also increase. In other words, the fitting performance of the generated images deteriorates relative to the original images, consistent with the observations from the wave number spectrum analysis.
This phenomenon can be attributed to the increasing complexity associated with higher sea states. As sea conditions become more severe, nonlinear interactions and breaking waves exert a significant influence on the prediction results. Consequently, both the retrieval accuracy of the model and the fidelity of the measured wave surfaces are adversely affected.
3.2. Measured Wave Surface Retrieval
In this section, we conduct a 3D wave surface retrieval analysis using the proposed retrieval model described in
Section 2.2, applied to measured sea clutter data. The data are sourced from sea clutter files (*.POL) collected by the WAMOS II radar system (OceanWaveS GmbH, Lüneburg, Germiny). These files are accessible via the WinWaMoS software (version 3.03) platform through its menu-based interface.
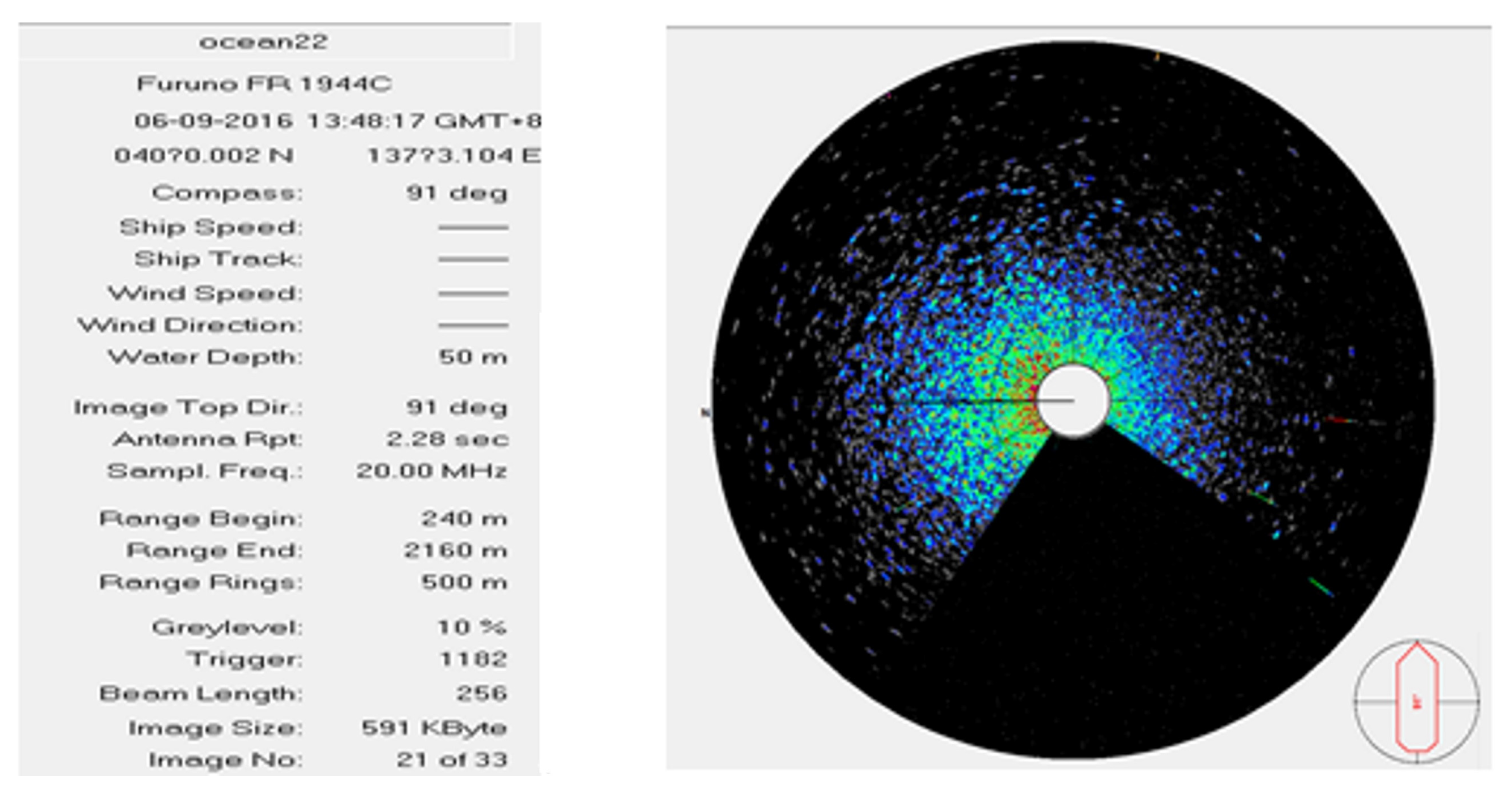
As shown in
Figure 13, the sample data are collected on 9 June 2016 at 13:48:17 local time. The geographical coordinates of the data collection site are latitude 40°02′ S and longitude 137°03′104″ E. The recorded compass angle is 91°, with a bow angle of 1°. The water depth at the location is approximately 50 m.
The acquisition system is configured with an antenna rotation period of 2.28 s, a signal transmission frequency of 20 MHz, and a polar radius acquisition range spanning approximately 240 to 2160 m. Additionally, the signal image resolution is set to 256 pixels, with a tolerance of ±10%. Within each acquisition cycle, 33 groups of data are sampled over a range of to .
The collected Polar Data (POL) file consists of two primary components: the header and the image. The header includes essential WaMos configuration parameters, while the image is stored as a binary-encoded file.
Since the image data are stored in a range-to-azimuth format, it is necessary to construct a 3D array for effective interpretation. The first dimension corresponds to the data volume within a single cycle, while the third dimension represents the distance associated with each image. The second dimension is computed to accurately represent the azimuthal extent of the images.
Following the analysis of the POL file, a coherent color scheme is applied to generate both the original WAMOS II image and its corresponding MATLAB reproduction using the same POL file, as illustrated in
Figure 14.
After processing and saving the sea clutter data in MATLAB, an angular range from 0 to
, centered on the ship’s heading, is selected. This selection enables the generation of a sequence diagram illustrating the sea clutter distribution relative to the ship’s heading, as depicted in
Figure 15.
To validate the proposed method, the approach from Reference [
28] is used as a benchmark to compare the retrieval accuracy of the three methods, as real-world tools for capturing full wave surfaces are currently unavailable. This benchmark predicts temporal and spatial wave evolution by calculating eigenvalues of the nonlinear Schrödinger (NLS) equation from measured wave height data using the inverse scattering transform of the third-order NLS equation.
First, a fixed point is selected from the reconstructed three-dimensional wave surface as the monitoring point. A 100 s wave height time-history dataset is extracted from this point, and its upper and lower envelopes are identified.
The initial data and corresponding envelopes are then input into the NLS equation, where the model computes the eigenvalues of the equation. Using these eigenvalues, the model predicts the subsequent 400 s of wave height envelopes.
The 400 s wave height sequences at the monitoring point are predicted using the proposed model, the traditional Pix2Pix model, and the CNNSA model. These predictions are compared with the benchmark wave height envelopes, as shown in
Figure 16. The Mean Square Error (MSE) between the predictions of each model and the benchmark is computed and summarized in
Table 6.
The analysis results indicate that the model proposed in this study demonstrates superior performance. As shown in
Figure 16, the wave height predictions generated by the Atten-Pix2Pix model exhibit the highest degree of consistency with the envelope results derived from the NLS equation. Compared to the retrieval results obtained using the Schrödinger equation model, the proposed model achieves a Mean Square Error (MSE) of 0.3215, which is notably lower than that of the other two models. This result highlights the effectiveness and superiority of the proposed method in this study.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}