
Reliable, Energy-Optimized, and Void-Aware (REOVA), Routing Protocol with Strategic Deployment in Mobile Underwater Acoustic Communications


Abstract
1. Introduction
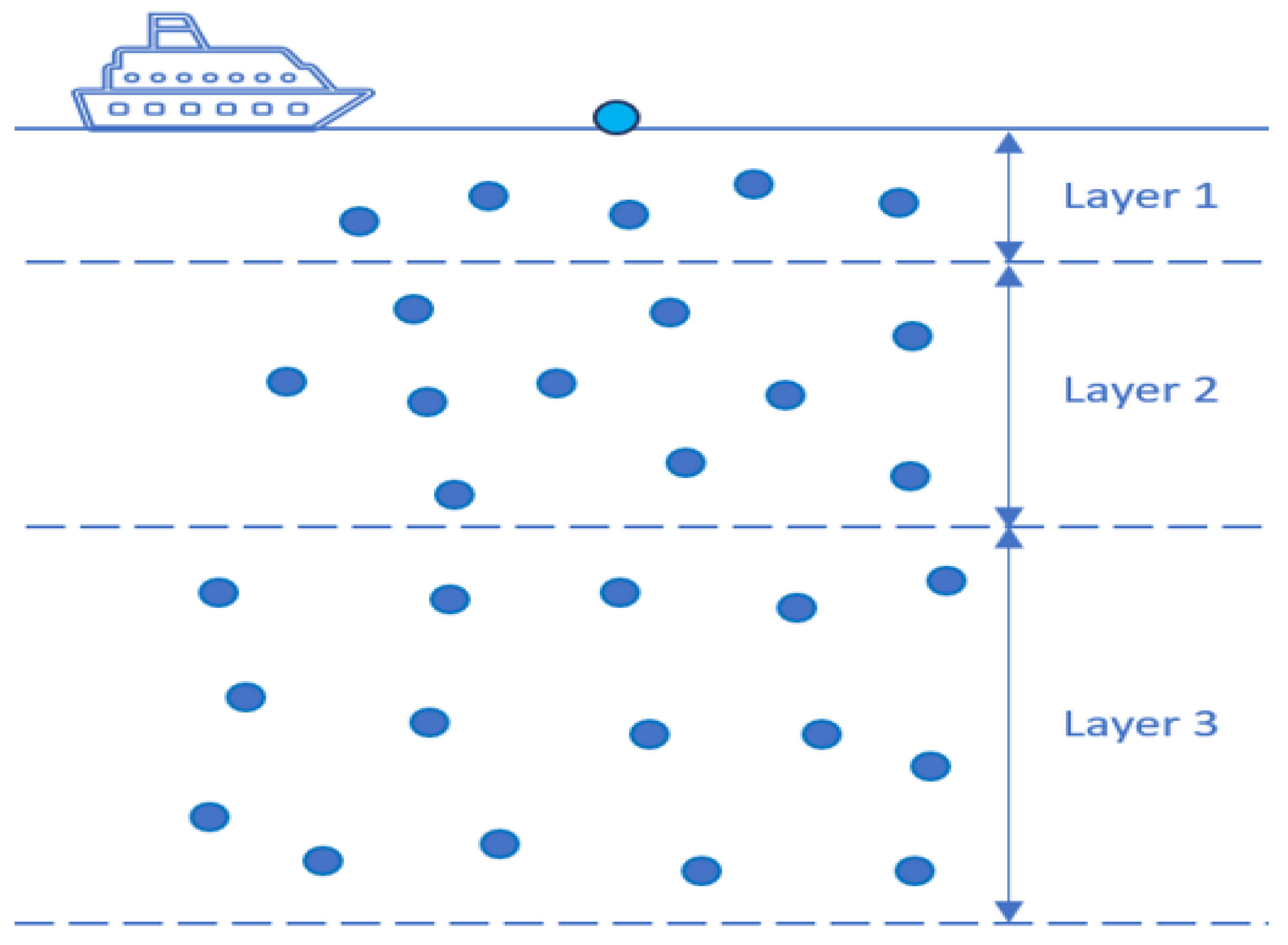
- A depth-aware strategic deployment technique is proposed which focuses on the even distribution nodes in the monitoring region in all depths. This deployment technique mitigates the need for an excessive number of sensor node deployments to cover a monitoring region and reduces the chance of void node issues.
- Introduces a clustering-based routing protocol that generates the energy optimal clusters to maximize the UASN life expectancy and avoid routing paths that involve void nodes.
- The proposed Reliable, Energy Optimized and Void-Aware (REOVA) protocol undergoes a thorough evaluation by performing extensive simulations to observe network performance comparing it to the state-of-the-art protocols and analyzing its performance.
2. Related Word
2.1. Localization-Based Routing Protocols
2.2. Localization Free Routing Protocols
3. Problem Statement
4. Existing Underwater System Models
4.1. Underwater Energy Utilization Models
4.2. Underwater Noise Estimation Model
5. Proposed Reliable, Energy Optimized and Void Aware Routing Protocol
5.1. Underwater Network Model Assumptions
5.2. Strategic Deployment of Sensor Nodes
5.3. Information Dissemination
5.4. Clustering Process
Optimal Sum of Clusters
| Algorithm 1: Optimal Cluster Formation |
| Input: 3 Dimensions of Underwater Networking Region and Transmission Range Output: Optimal Number of Clusters Formation |
|
| Algorithm 2: Cluster Head Selection |
| Input: Optimal Number of Clusters Formation Output: Cluster Head Selection |
|
5.5. Routing Path Discovery Process
| Algorithm 3: Reliable, Energy Optimized and Void Aware Route Discovery |
| Input: Cluster Heads, Source Node Output: Optimal Routing Path Discovery |
|
6. Simulation Environment
6.1. Simulation Parameters
6.2. Performance Metrics
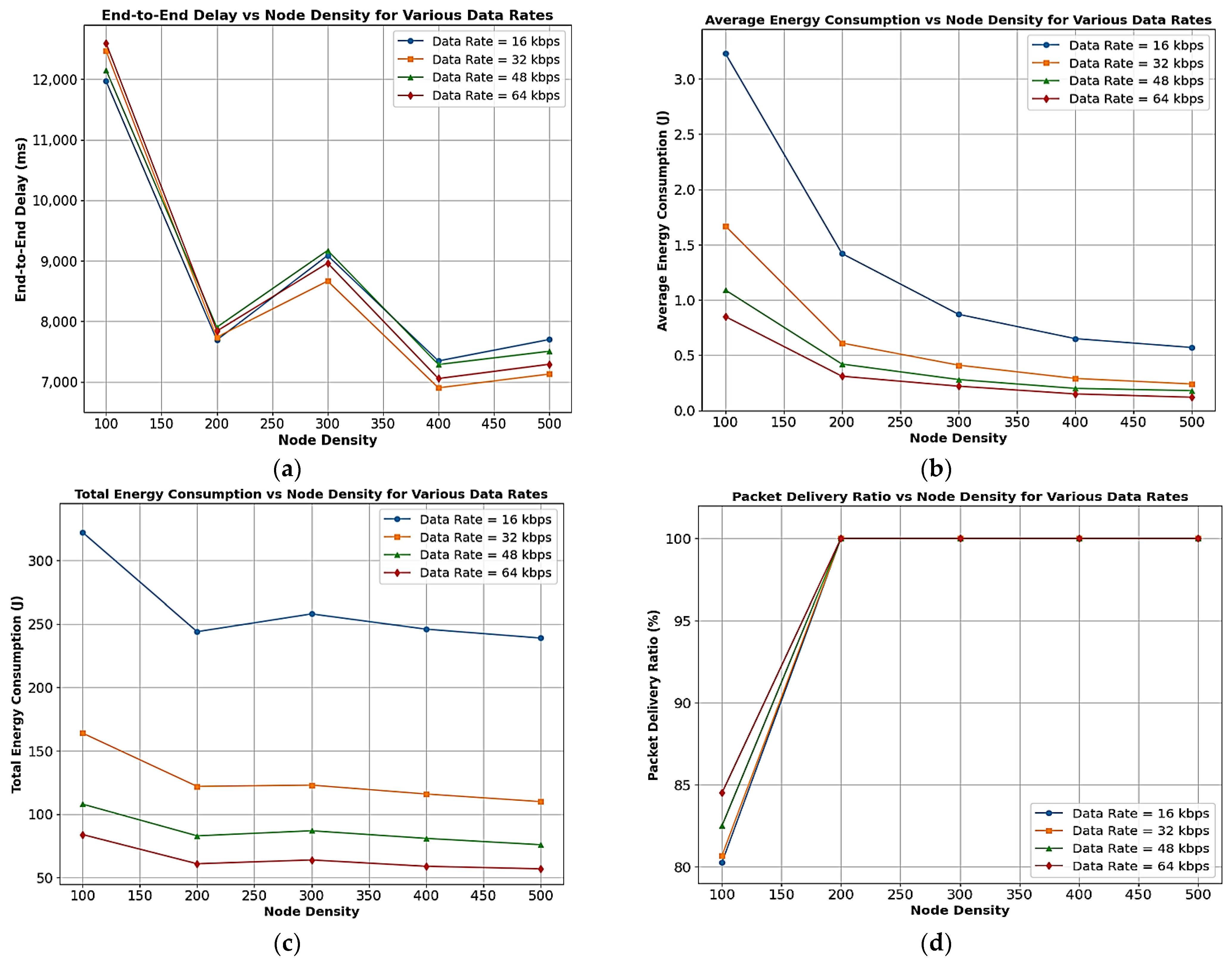
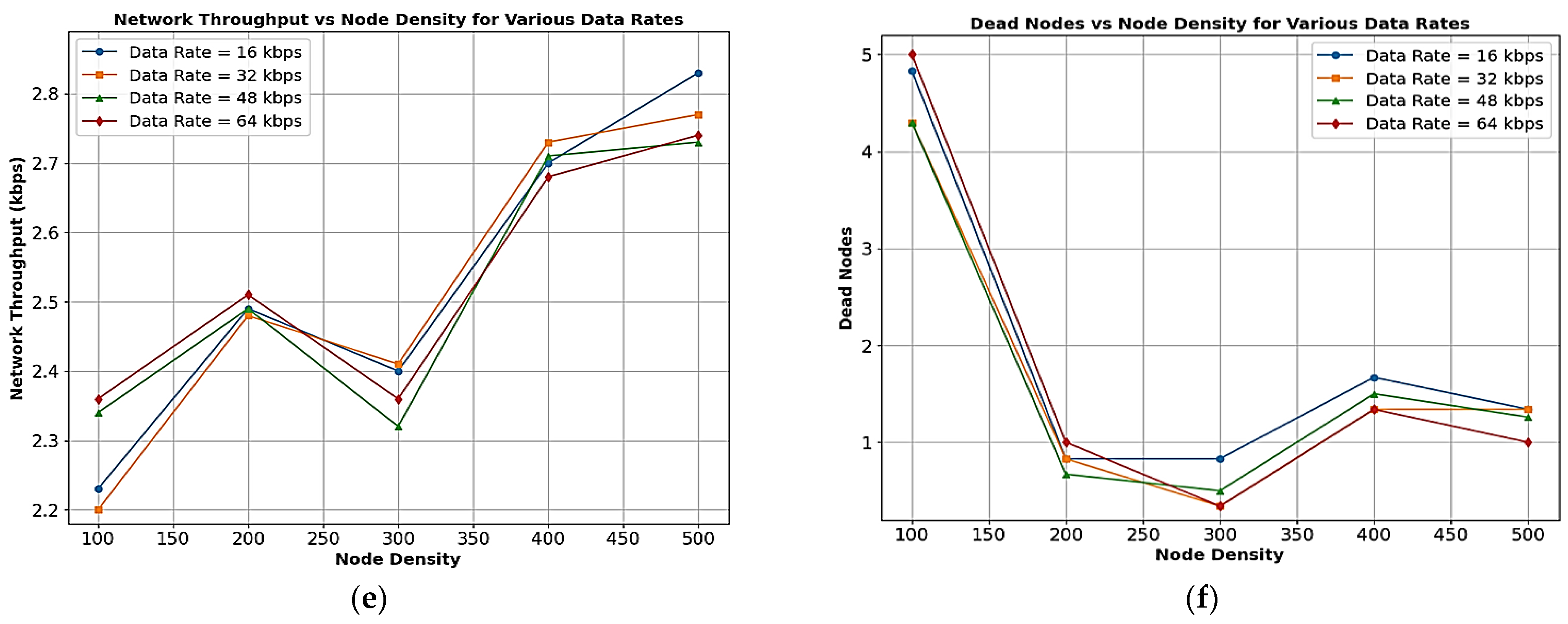
7. Results and Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shah, S.M.; Sun, Z.; Zaman, K.; Hussain, A.; Ullah, I.; Ghadi, Y.Y.; Khan, M.A.; Nasimov, R. Advancements in Neighboring-Based Energy-Efficient Routing Protocol (NBEER) for Underwater Wireless Sensor Networks. Sensors 2023, 23, 6025. [Google Scholar] [CrossRef] [PubMed]
- Shakila, R.; Paramasivan, B. An improvised optimization algorithm for submarine detection in underwater wireless sensor networks. Microsyst. Technol. 2024, 30, 185–196. [Google Scholar] [CrossRef]
- Khan, A.; Khan, M.; Ahmed, S.; Iqbal, N.; Abd Rahman, M.A.; Abdul Karim, M.K.; Mustafa, M.S.; Yaakob, Y. EH-IRSP: Energy Harvesting Based Intelligent Relay Selection Protocol. IEEE Access 2021, 9, 64189–64199. [Google Scholar] [CrossRef]
- Wibisono, A.; Piran, M.J.; Song, H.K.; Lee, B.M. A Survey on Unmanned Underwater Vehicles: Challenges, Enabling Technologies, and Future Research Directions. Sensors 2023, 23, 7321. [Google Scholar] [CrossRef]
- Wang, Z.; Han, G.; Qin, H.; Zhang, S.; Sui, Y. An Energy-Aware and Void-Avoidable Routing Protocol for Underwater Sensor Networks. IEEE Access 2018, 6, 7792–7801. [Google Scholar] [CrossRef]
- Khan, A.M.; Luque-Nieto, M.A.; Siddique, A.A. Underwater Efficient Data Routing: Clustering-Travel Salesman Protocol (CTSP). IEEE Access 2024, 12, 26428–26440. [Google Scholar] [CrossRef]
- Khasawneh, A.M.; Kaiwartya, O.; Lloret, J.; Abuaddous, H.Y.; Abualigah, L.; Al Shinwan, M.; Al-Khasawneh, M.A.; Mahmoud, M.; Kharel, R. Green communication for underwater wireless sensor networks: Triangle metric based multi-layered routing protocol. Sensors 2020, 20, 7278. [Google Scholar] [CrossRef]
- Gola, K.K. A Comprehensive Survey of Localization Schemes and Routing Protocols with Fault Tolerant Mechanism in UWSN- Recent Progress and Future Prospects; Springer: New York, NY, USA, 2024; ISBN 0123456789. [Google Scholar]
- Mhemed, R.; Comeau, F.; Phillips, W.; Aslam, N. Void avoidance opportunistic routing protocol for underwater wireless sensor networks. Sensors 2021, 21, 1942. [Google Scholar] [CrossRef]
- Tian, K.; Zhou, C.; Zhang, J. Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks. Sensors 2024, 24, 556. [Google Scholar] [CrossRef]
- Yu, W.; Chen, Y.; Wan, L.; Zhang, X.; Zhu, P.; Xu, X. An Energy Optimization Clustering Scheme for Multi-Hop Underwater Acoustic Cooperative Sensor Networks. IEEE Access 2020, 8, 89171–89184. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Le, T.T.T.; Nguyen, H.H.; Voznak, M. Energy-efficient clustering multi-hop routing protocol in a UWSN. Sensors 2021, 21, 627. [Google Scholar] [CrossRef]
- Latif, K.; Javaid, N.; Ullah, I.; Kaleem, Z.; Malik, Z.A.; Nguyen, L.D. Dieer: Delay-intolerant energy-efficient routing with sink mobility in underwater wireless sensor networks. Sensors 2020, 20, 3467. [Google Scholar] [CrossRef] [PubMed]
- Joshi, S.; Anithaashri, T.P.; Rastogi, R.; Choudhary, G.; Dragoni, N. IEDA-HGEO: Improved Energy Efficient with Clustering-Based Data Aggregation and Transmission Protocol for Underwater Wireless Sensor Networks. Energies 2023, 16, 353. [Google Scholar] [CrossRef]
- Xiao, X.; Huang, H. A clustering routing algorithm based on improved ant colony optimization algorithms for underwater wireless sensor networks. Algorithms 2020, 13, 250. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Wang, B.; Sun, W.; Du, H.; Zhao, Y. Energy-Efficient Data Transmission for Underwater Wireless Sensor Networks: A Novel Hierarchical Underwater Wireless Sensor Transmission Framework. Sensors 2023, 23, 5759. [Google Scholar] [CrossRef]
- Karim, S.; Shaikh, F.K.; Aurangzeb, K.; Chowdhry, B.S.; Alhussein, M. Anchor Nodes Assisted Cluster-Based Routing Protocol for Reliable Data Transfer in Underwater Wireless Sensor Networks. IEEE Access 2021, 9, 36730–36747. [Google Scholar] [CrossRef]
- Ganesh, N. Performance Evaluation of Depth Adjustment and Void Aware Pressure Routing (DA-VAPR) Protocol for Underwater Wireless Sensor Networks. Comput. J. 2020, 63, 193–202. [Google Scholar] [CrossRef]
- Zhu, R.; Jiang, Q.; Huang, X.; Li, D.; Yang, Q. A Reinforcement-Learning-Based Opportunistic Routing Protocol for Energy-Efficient and Void-Avoided UASNs. IEEE Sens. J. 2022, 22, 13589–13601. [Google Scholar] [CrossRef]
- Singh, B.; Gupta, B. An Energy Efficient Optimal Path Routing (EEOPR) for Void Avoidance in Underwater Acoustic Sensor Networks. Int. J. Comput. Netw. Inf. Secur. 2022, 14, 19–32. [Google Scholar] [CrossRef]
- Jin, Z.; Zhao, Q.; Luo, Y. Routing Void Prediction and Repairing in AUV-Assisted Underwater Acoustic Sensor Networks. IEEE Access 2020, 8, 54200–54212. [Google Scholar] [CrossRef]
- Yildiz, H.U. Joint Effects of Void Region Size and Sink Architecture on Underwater WSNs Lifetime. IEEE Sens. J. 2023, 23, 11046–11056. [Google Scholar] [CrossRef]
- Deng, X.; Shi, L.; Li, Y.; Luo, L.; Zheng, L. A Void-Avoidable and Reliability-Based Opportunistic Energy Efficiency Routing for Mobile Sparse Underwater Acoustic Sensor Network. In Proceedings of the 2021 IEEE/ACIS 20th International Fall Conference on Computer and Information Science (ICIS Fall), Xi’an, China, 13–15 October 2021; pp. 269–274. [Google Scholar] [CrossRef]
- Bouk, S.H.; Ahmed, S.H.; Park, K.J.; Eun, Y. EDOVE: Energy and depth variance-based opportunistic void avoidance scheme for underwater acoustic sensor networks. Sensors 2017, 17, 2212. [Google Scholar] [CrossRef]
- Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.H.; Aalsalem, M.Y.; Khan, W.Z. Void hole avoidance for reliable data delivery in IoT enabled underwater wireless sensor networks. Sensors 2018, 18, 3271. [Google Scholar] [CrossRef]
- Gola, K.K.; Gupta, B. Underwater Acoustic Sensor Networks: An Energy Efficient and Void Avoidance Routing Based on Grey Wolf Optimization Algorithm. Arab. J. Sci. Eng. 2021, 46, 3939–3954. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A.F. GEDAR: Geographic and opportunistic routing protocol with Depth Adjustment for mobile underwater sensor networks. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 251–256. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the 7th International IFIP-TC6 Networking Conference, Singapore, 5–9 May 2008; pp. 72–86. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Lee, S.; Wang, P.; Vieira, L.F.M.; Cui, J.H.; Gerla, M.; Kim, K. HydroCast: Pressure routing for underwater sensor networks. IEEE Trans. Veh. Technol. 2016, 65, 333–347. [Google Scholar] [CrossRef]
- Barbeau, M.; Blouin, S.; Cervera, G.; Garcia-alfaro, J.; Barbeau, M.; Blouin, S.; Cervera, G.; Garcia-alfaro, J.; Kranakis, E. Location-free link state routing for underwater acoustic sensor networks. To cite this version: HAL Id: Hal-01263407 Location-free Link State Routing for Underwater Acoustic Sensor Networks. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2016. [Google Scholar]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. An inherently void avoidance routing protocol for underwater sensor networks. In Proceedings of the 2015 International Symposium on Wireless Communication Systems (ISWCS), Brussels, Belgium, 25–28 August 2015; pp. 361–365. [Google Scholar] [CrossRef]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A Multi-Layer Cluster Based Energy Efficient Routing Scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Karim, S.; Shaikh, F.K.; Chowdhry, B.S. Void Handling in Routing Protocols for Underwater Wireless Sensor Networks: A Quantitative Analysis. In Proceedings of the 2021 IEEE 18th International Conference on Smart Communities: Improving Quality of Life Using ICT, IoT and AI (HONET), Karachi, Pakistan, 11–13 October 2021; pp. 137–142. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. CARP: A Channel-aware routing protocol for underwater acoustic wireless networks. Ad Hoc Netw. 2015, 34, 92–104. [Google Scholar] [CrossRef]
- Rahman, M.A.; Lee, Y.; Koo, I. EECOR: An Energy-Efficient Cooperative Opportunistic Routing Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2017, 5, 14119–14132. [Google Scholar] [CrossRef]
- Alasarpanahi, H.; Ayatollahitafti, V.; Gandomi, A. Energy-efficient void avoidance geographic routing protocol for underwater sensor networks. Int. J. Commun. Syst. 2020, 33, e4218. [Google Scholar] [CrossRef]
- Datta, A.; Dasgupta, M. Energy Efficient Layered Cluster Head Rotation Based Routing Protocol for Underwater Wireless Sensor Networks. Wirel. Pers. Commun. 2022, 125, 2497–2514. [Google Scholar] [CrossRef]
- Benson, B.; Kastner, R. Design of a low-cost underwater acoustic modem. In Optical, Acoustic, Magnetic, and Mechanical Sensor Technologies; Taylor & Francis: London, UK, 2017; pp. 175–209. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, Y.; Sun, X.; Wu, J.; Liu, Z.; Xu, X. ECRKQ: Machine Learning-Based Energy-Efficient Clustering and Cooperative Routing for Mobile Underwater Acoustic Sensor Networks. IEEE Access 2021, 9, 70843–70855. [Google Scholar] [CrossRef]
- Khan, M.U.; Aamir, M.; Shams, R.; Otero, P.; Jilani, U.; Saleem, F. Comparative Evaluation of Acoustic Channel Characteristics for Reliable Design of Underwater Acoustic Sensor Networks (UASN). In Proceedings of the 2023 Global Conference on Wireless and Optical Technologies (GCWOT), Malaga, Spain, 24–27 January 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Hong, Z.; Pan, X.; Chen, P.; Su, X.; Wang, N.; Lu, W. A topology control with energy balance in underwater wireless sensor networks for iot-based application. Sensors 2018, 18, 2306. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, G.; Zhao, X.; Fareed, M.M.S.; Fareed, M.Z. An energy-efficient redundant transmission control clustering approach for underwater acoustic networks. Sensors 2019, 19, 4241. [Google Scholar] [CrossRef]
- Mateen, A.; Awais, M.; Javaid, N.; Ishmanov, F.; Afzal, M.K.; Kazmi, S. Geographic and opportunistic recovery with depth and power transmission adjustment for energy-efficiency and void hole alleviation in UWSNs. Sensors 2018, 19, 709. [Google Scholar] [CrossRef]
- Khan, Z.A.; Awais, M.; Alghamdi, T.A.; Khalid, A.; Fatima, A.; Akbar, M.; Javaid, N. Region Aware Proactive Routing Approaches Exploiting Energy Efficient Paths for Void Hole Avoidance in Underwater WSNs. IEEE Access 2019, 7, 140703–140722. [Google Scholar] [CrossRef]
- Khan, M.U.; Otero, P.; Aamir, M. An Energy Efficient Clustering Routing Protocol based on Arithmetic Progression for Underwater Acoustic Sensor Networks. IEEE Sens. J. 2024, 24, 6964–6975. [Google Scholar] [CrossRef]
- Wahid, A.; Lee, S.; Jeong, H.; Kim, D. EEDBR: Energy-Efficient Depth-Based Routing Protocol for Underwater Wireless Sensor Networks. In Advanced Computer Science and Information Technology: Proceedings of the Third International Conference, AST 2011, Seoul, Republic of Korea, 27–29 September 2011; Proceedings; Springer: Berlin/Heidelberg, Germany, 2011; pp. 223–234. [Google Scholar]
- Li, L.; Qiu, Y.; Xu, J. A K-Means Clustered Routing Algorithm with Location and Energy Awareness for Underwater Wireless Sensor Networks. Photonics 2022, 9, 282. [Google Scholar] [CrossRef]
- Bai, Q.; Jin, C. A K -Means and Ant Colony Optimization-Based Routing in Underwater Sensor Networks. Mob. Inf. Syst. 2022, 2022, 12. [Google Scholar] [CrossRef]
- Omeke, K.G.; Mollel, M.S.; Ozturk, M.; Ansari, S.; Zhang, L.; Abbasi, Q.H.; Imran, M.A. DEKCS: A Dynamic Clustering Protocol to Prolong Underwater Sensor Networks. IEEE Sens. J. 2021, 21, 9457–9464. [Google Scholar] [CrossRef]
- Khan, S.; Singh, Y.V.; Yadav, P.S.; Sharma, V.; Lin, C.C.; Jung, K.H. An Intelligent Bio-Inspired Autonomous Surveillance System Using Underwater Sensor Networks. Sensors 2023, 23, 7839. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | Descriptions | Deployment Technique | Merits | Demerits |
|---|---|---|---|---|
| EECMR [12] | The duration of CH is considered as the selection parameters of CH. The nodes in between layers act as relays | Random and sparse deployment | Improved energy consumption | Random and sparse deployment increases the chances of void region |
| GEDAR [27] | Geo-opportunistic routing based on depth adjustment | Random deployment | Improved PDR | High energy consumption, increased E2ED |
| DBR [28] | Use a greedy strategy, to efficiently manage the dynamic network | Random deployment | Improved energy utilization and PDR | Not considered void handling, high E2ED, more energy consumption |
| HydroCast [29] | Pressure-based routing protocol | Random deployment | Efficiently handles void issues, Improved PDR | High energy consumption |
| LLSR [30] | Hop-based routing protocol, void nodes can be identified by the beaconing technique | Random deployment | Decreased E2ED | Increased energy consumption and communication overhead |
| IVAR [31] | Beacon containing hop count and depth value based on greedy forwarding approach | Random deployment | Decreased E2ED, high PDR | High energy consumption due to duplicate packet transmission |
| MLCEE [32] | In multiple layer-based network architecture, Bayesian probability is used for CH selection | Random deployment | Balanced energy consumption | Increased E2ED, no mechanism provided to handle the void issue |
| VH-ANCRP [33] | The clustering approach is based on anchor nodes to deal with void nodes | Random deployment | Effective void handling mechanism | The early death of anchored nodes can affect the execution |
| VAPR [34] | Geo-opportunistic routing with explicit beaconing technique to avoid void areas | Random deployment | Improved PDR | High energy consumption, increased E2ED |
| CARP [35] | Used link quality and hop count value to avoid void areas | Random deployment | Effectively bypass void areas | Increases E2ED |
| EECOR [36] | Used opportunistic routing for data forwarding. | Random deployment | Efficient energy consumption | Increases E2ED |
| EVAGR [37] | The weighted function is applied for the selection of the best forwarding node | Random deployment | Increased reliability and energy efficiency | Increased control packets and E2ED |
| EE-LCHR [38] | Layer-based clustering routing protocol with CH rotation | Random deployment | Increased reliability and energy efficiency | No mechanism to handle Void issues. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.U.; Aamir, M.; Otero, P. Reliable, Energy-Optimized, and Void-Aware (REOVA), Routing Protocol with Strategic Deployment in Mobile Underwater Acoustic Communications. J. Mar. Sci. Eng. 2024, 12, 2215. https://doi.org/10.3390/jmse12122215
Khan MU, Aamir M, Otero P. Reliable, Energy-Optimized, and Void-Aware (REOVA), Routing Protocol with Strategic Deployment in Mobile Underwater Acoustic Communications. Journal of Marine Science and Engineering. 2024; 12(12):2215. https://doi.org/10.3390/jmse12122215
Chicago/Turabian StyleKhan, Muhammad Umar, Muhammad Aamir, and Pablo Otero. 2024. "Reliable, Energy-Optimized, and Void-Aware (REOVA), Routing Protocol with Strategic Deployment in Mobile Underwater Acoustic Communications" Journal of Marine Science and Engineering 12, no. 12: 2215. https://doi.org/10.3390/jmse12122215
APA StyleKhan, M. U., Aamir, M., & Otero, P. (2024). Reliable, Energy-Optimized, and Void-Aware (REOVA), Routing Protocol with Strategic Deployment in Mobile Underwater Acoustic Communications. Journal of Marine Science and Engineering, 12(12), 2215. https://doi.org/10.3390/jmse12122215