
A Back–Forward Approach-Based Efficiency Performance Analysis Model for Hybrid Electric Propulsion Ships Using the Holtrop–Mennen Method

Abstract
:1. Introduction
2. Back–Forward Powertrain Model
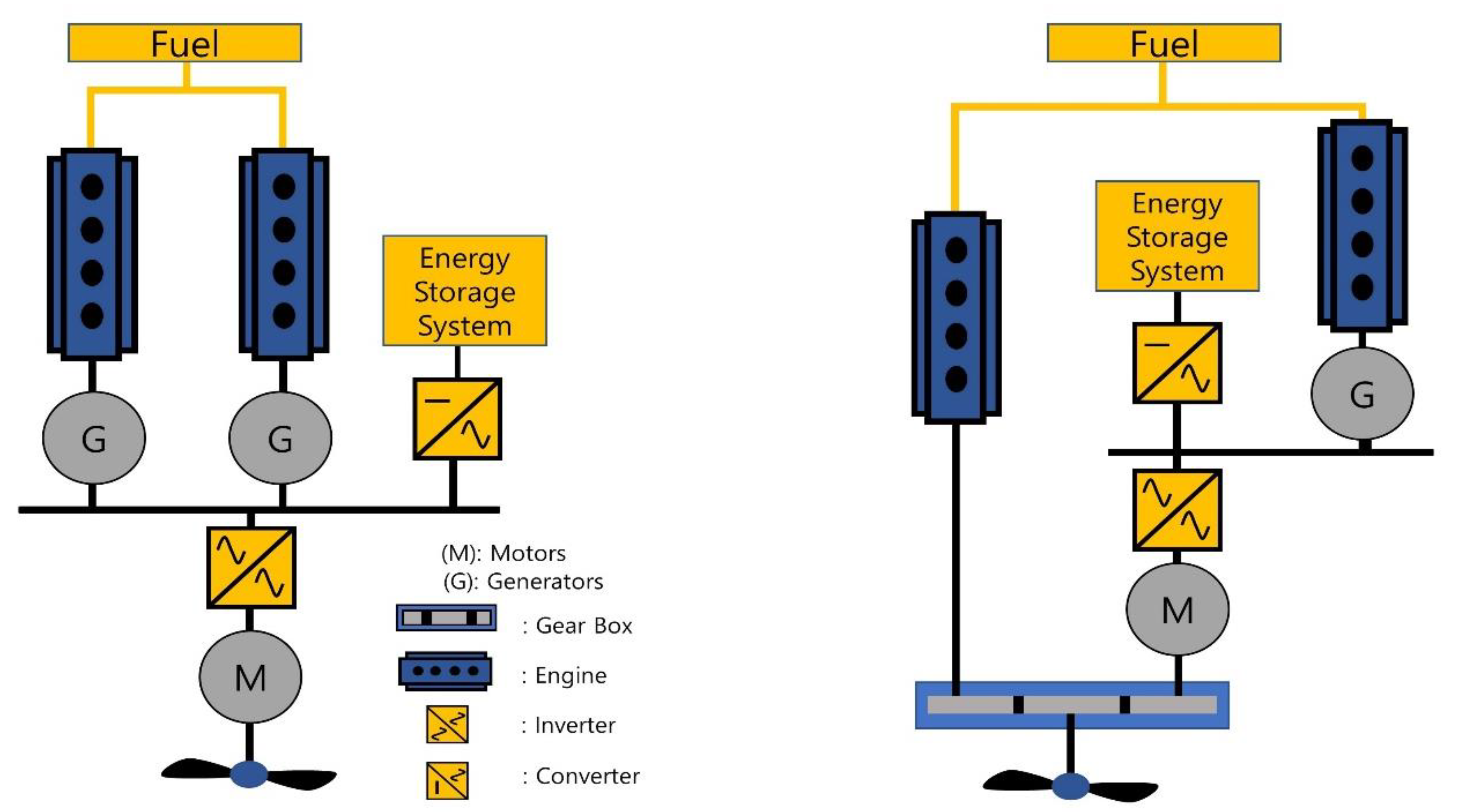
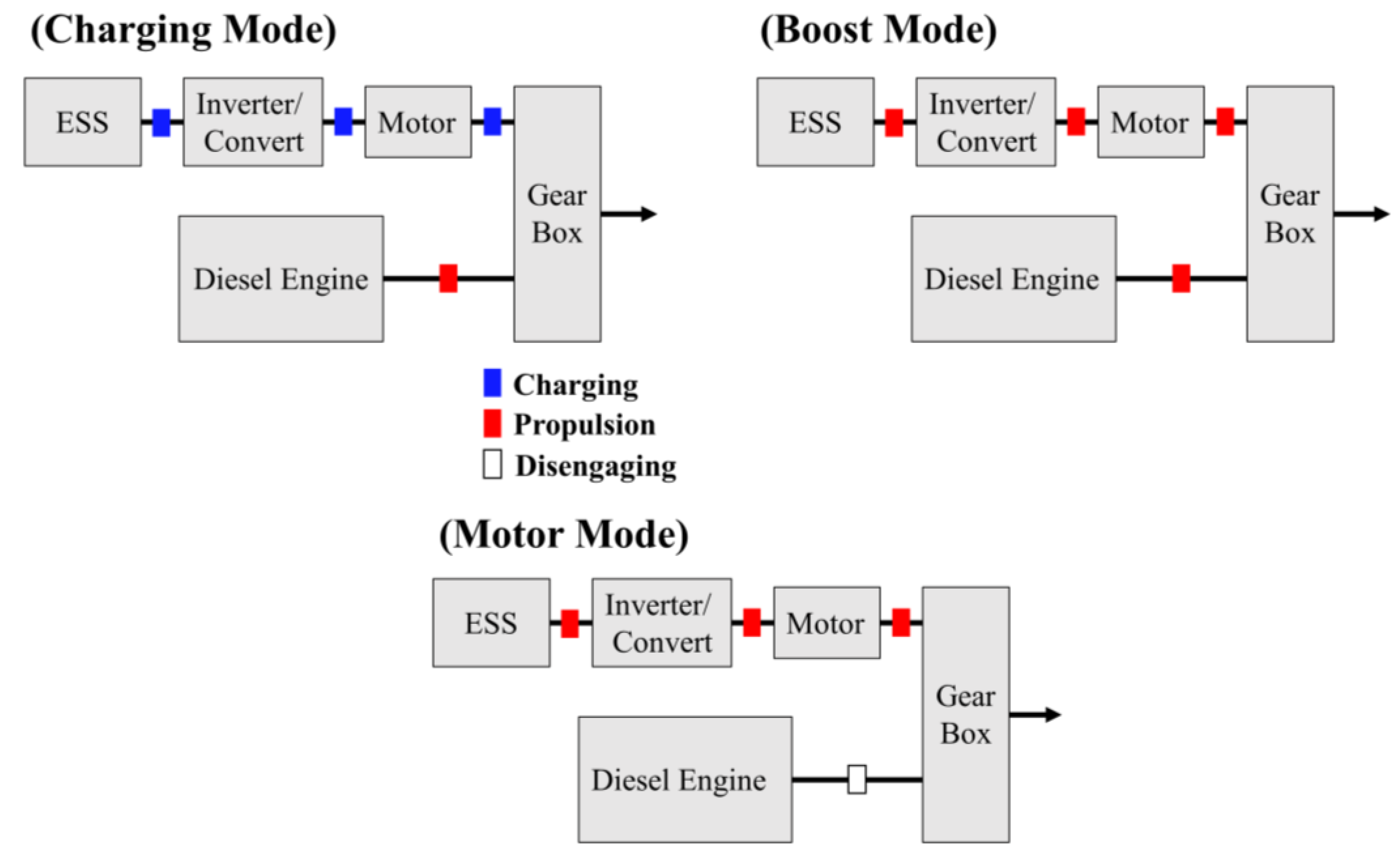
2.1. Types of Hybrid Electric Propulsion System
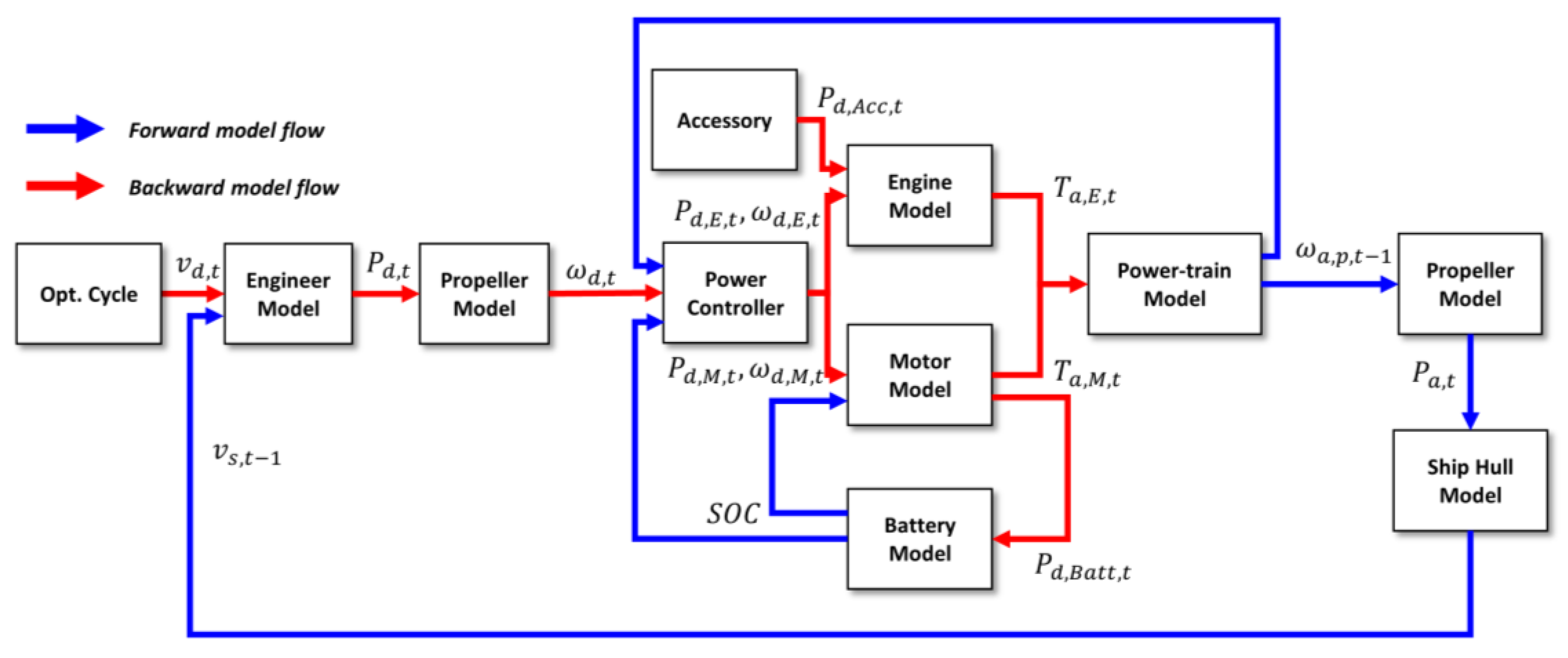
2.2. Back–Forward Approach-Based Model
2.3. Modeling Equations
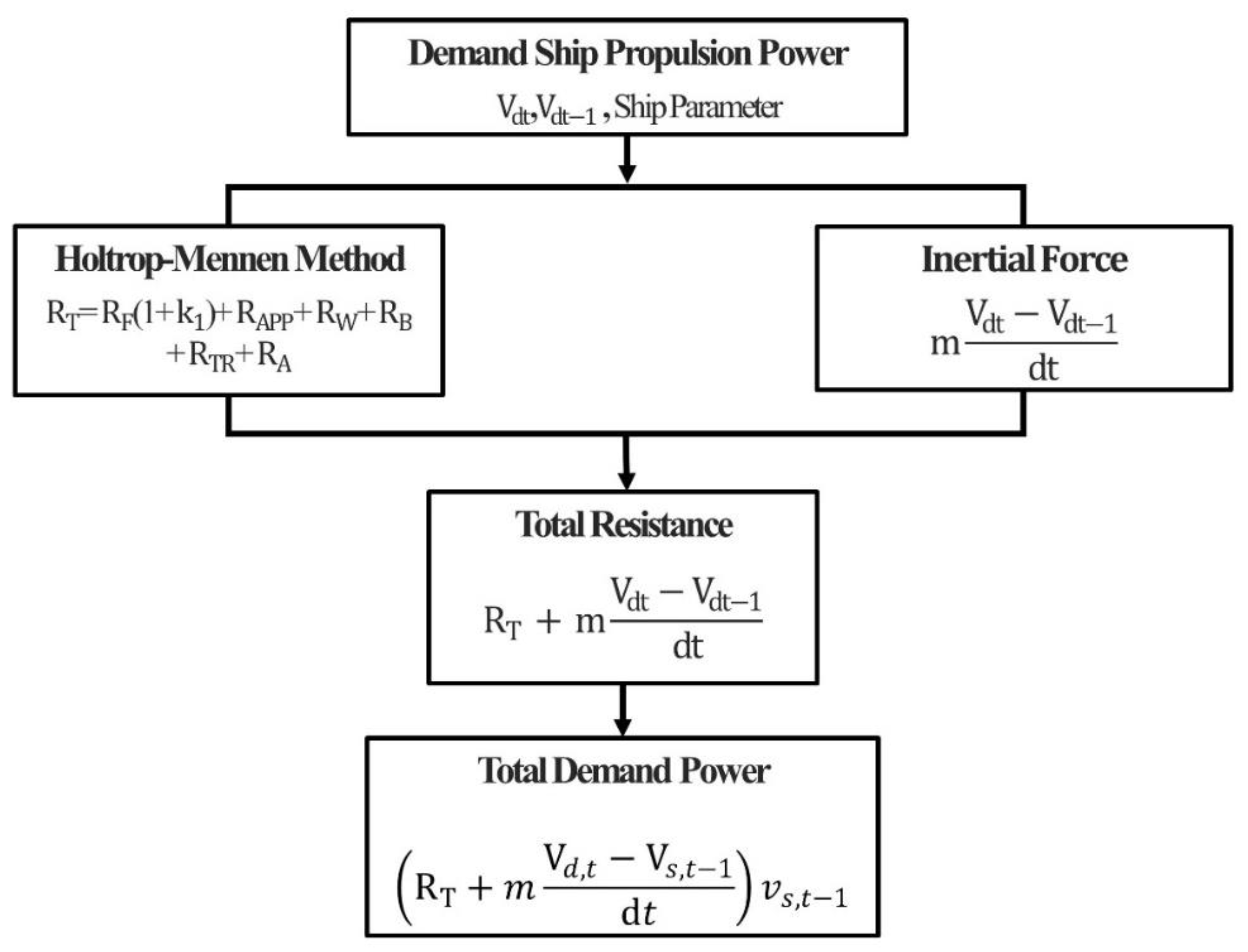
3. Power Demand from Holtrop–Mennen Resistance Model
4. Model for a Maritime Supply Ship
4.1. Ship Specifications
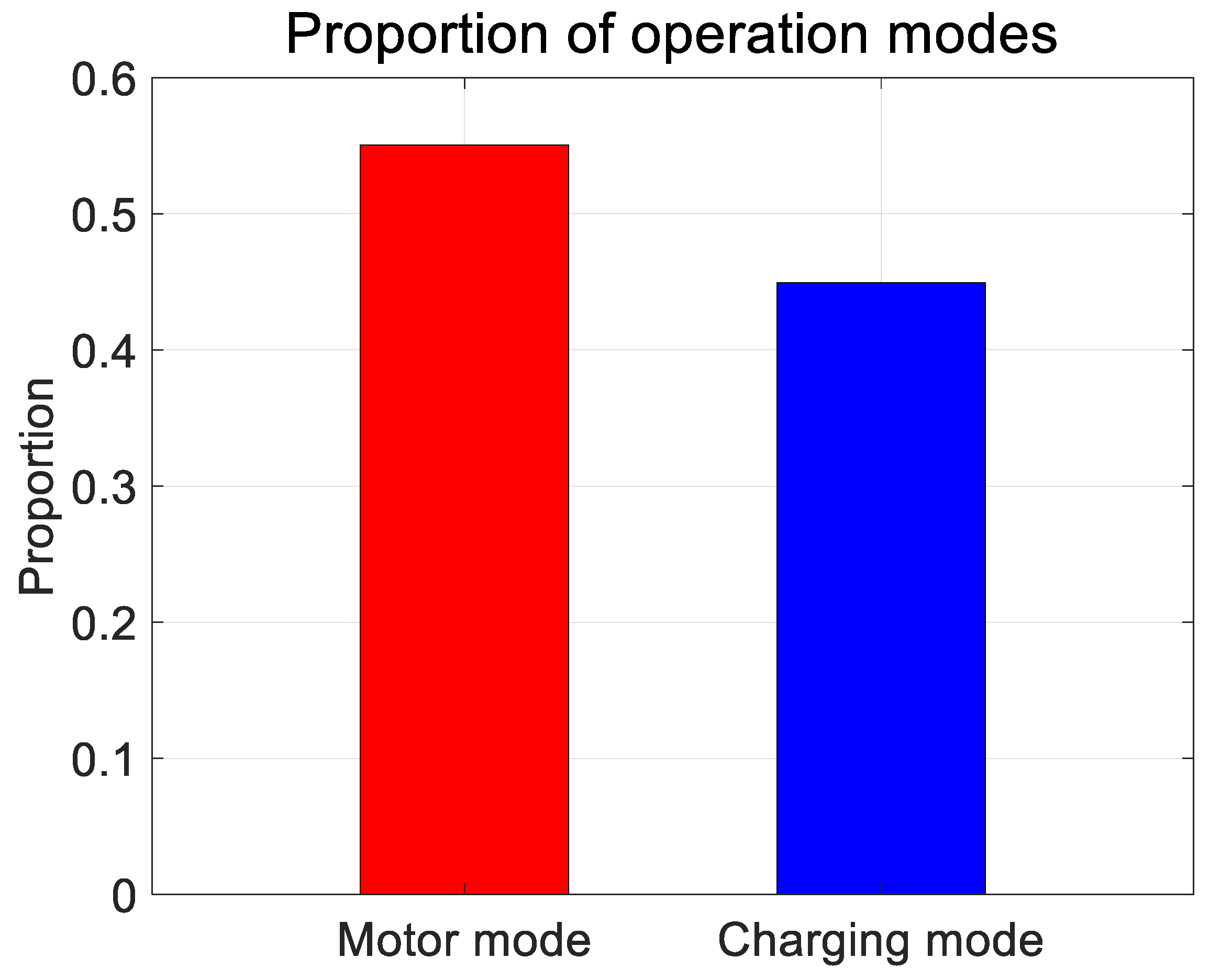
4.2. Propulsion Modes of the Hybrid System
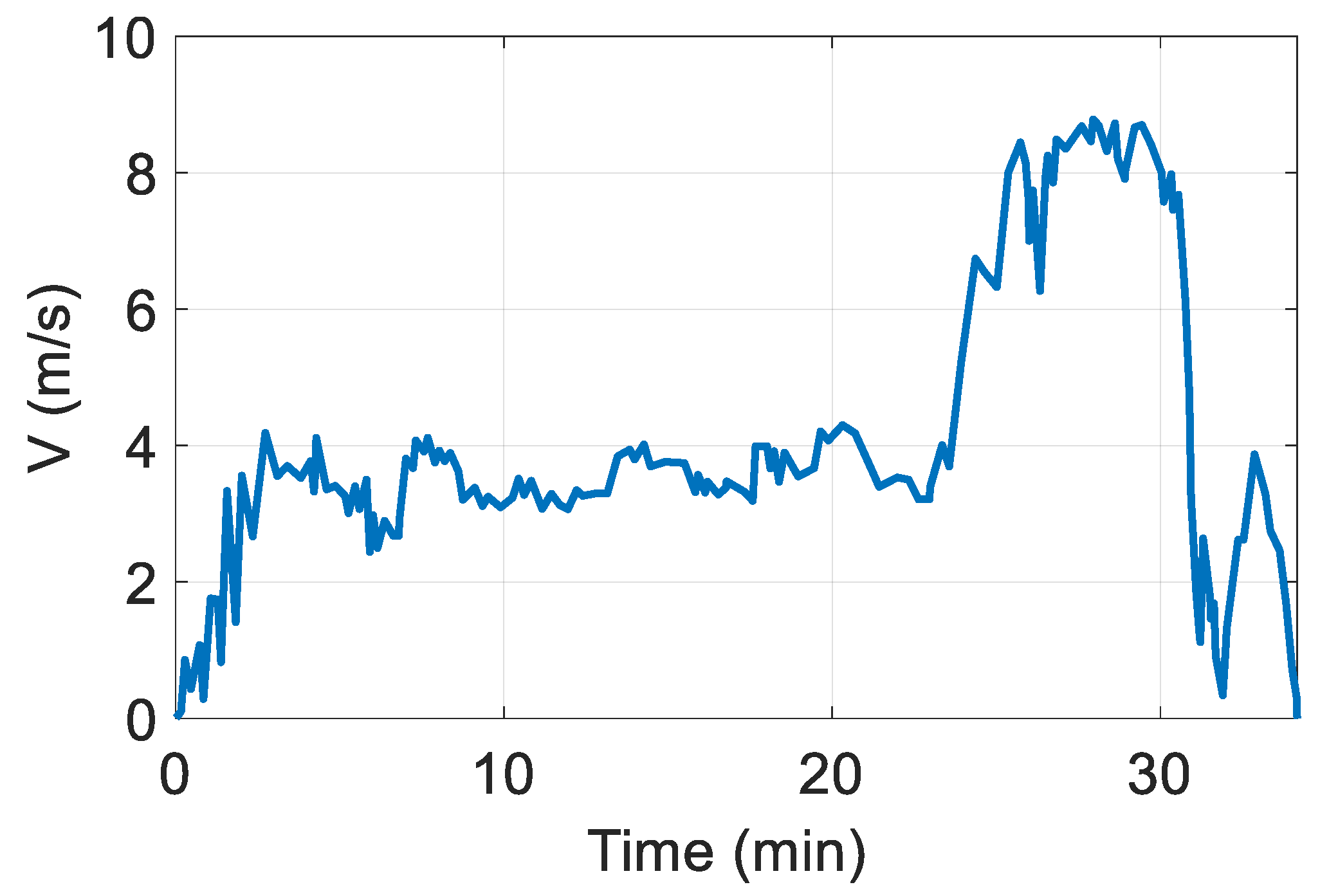
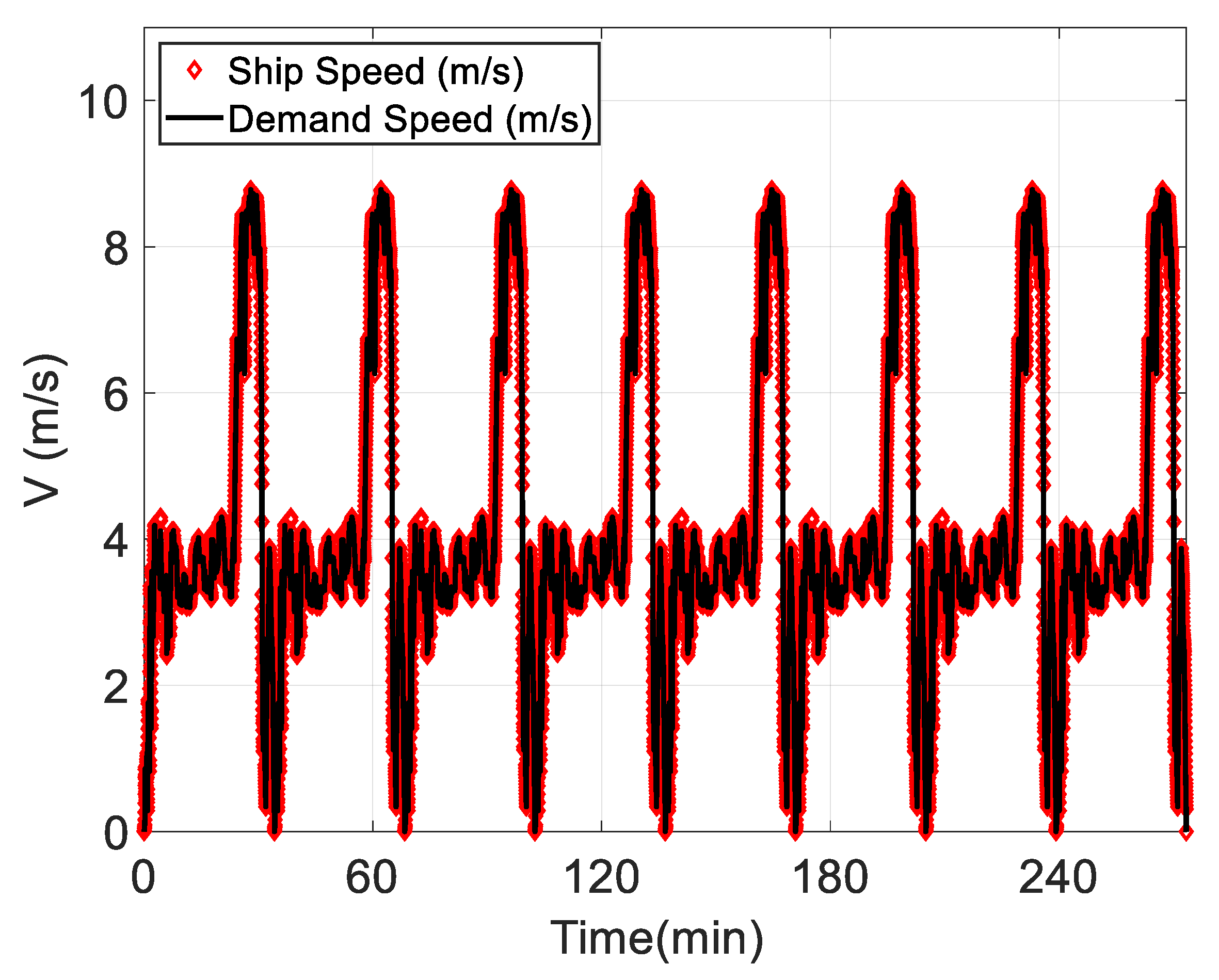
4.3. Operation Cycle
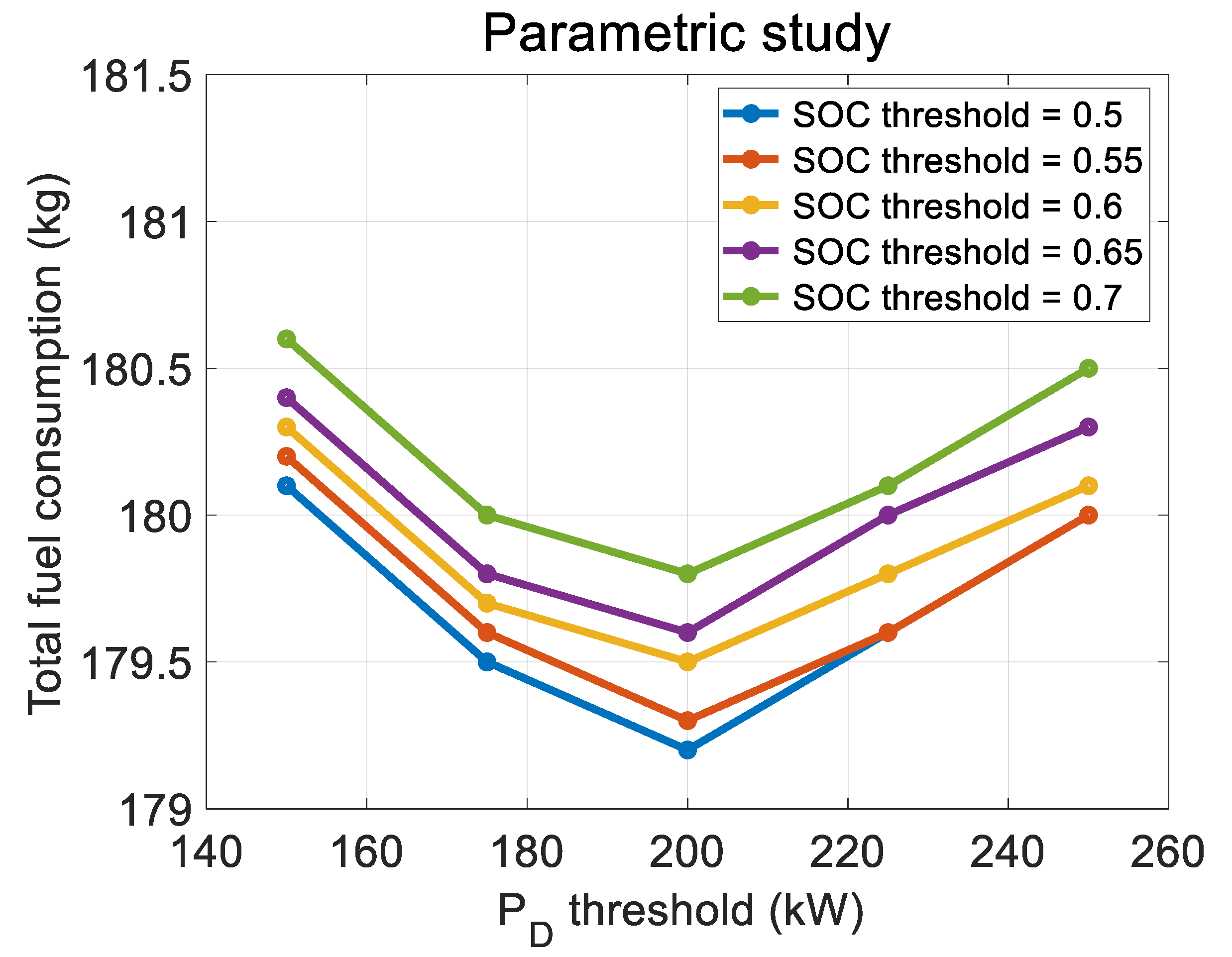
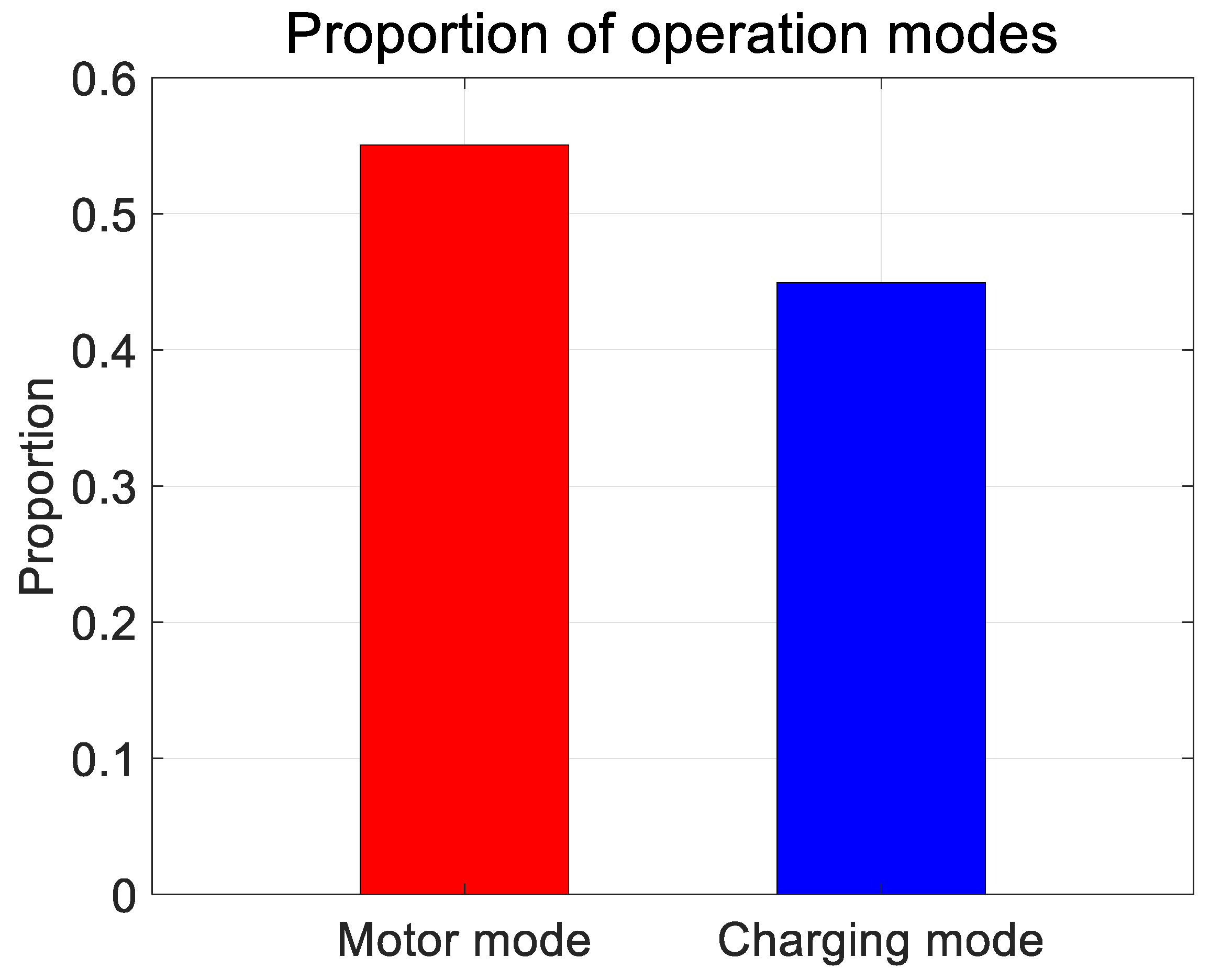
4.4. Rule-Based Power Control Strategy
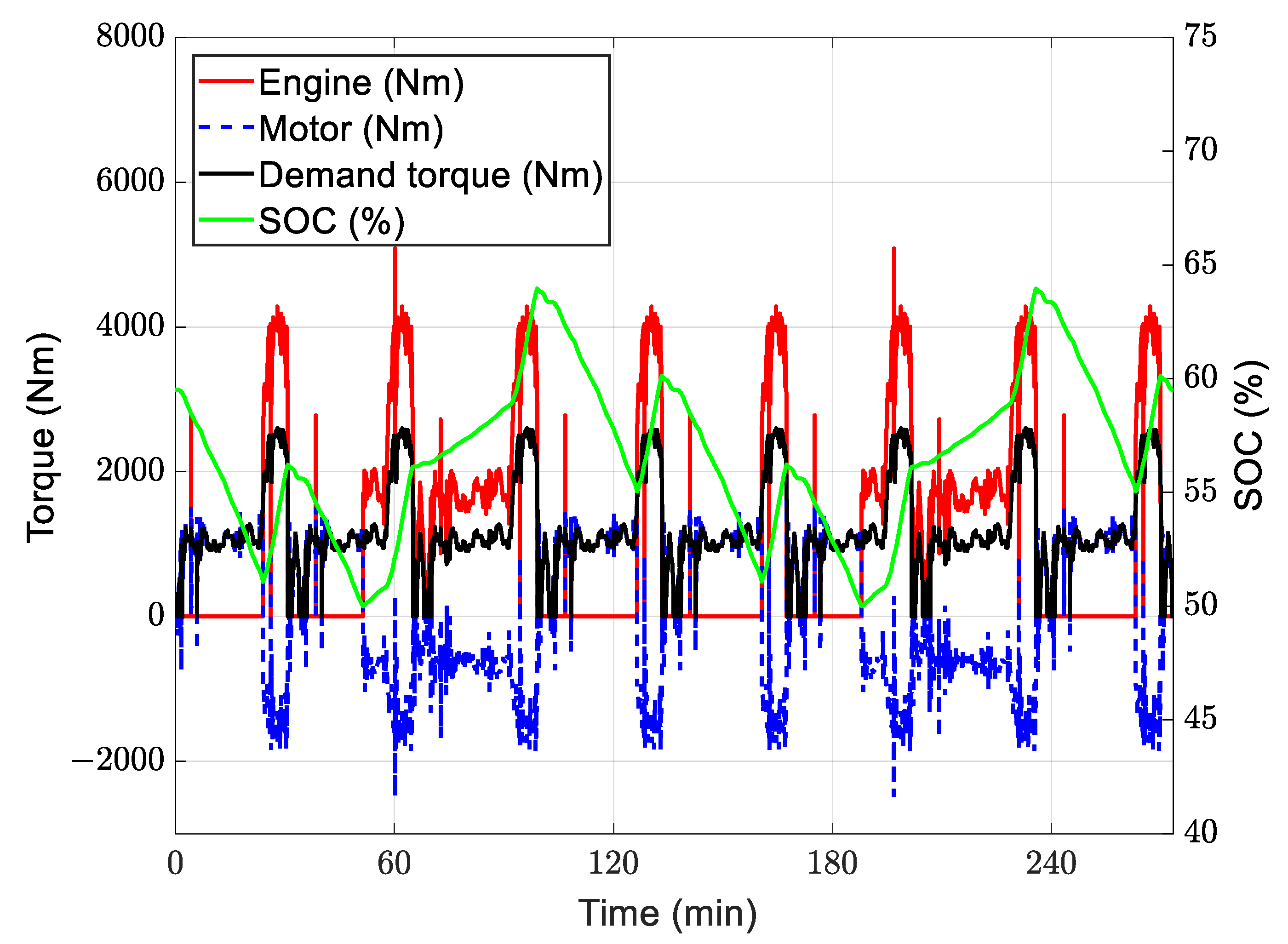
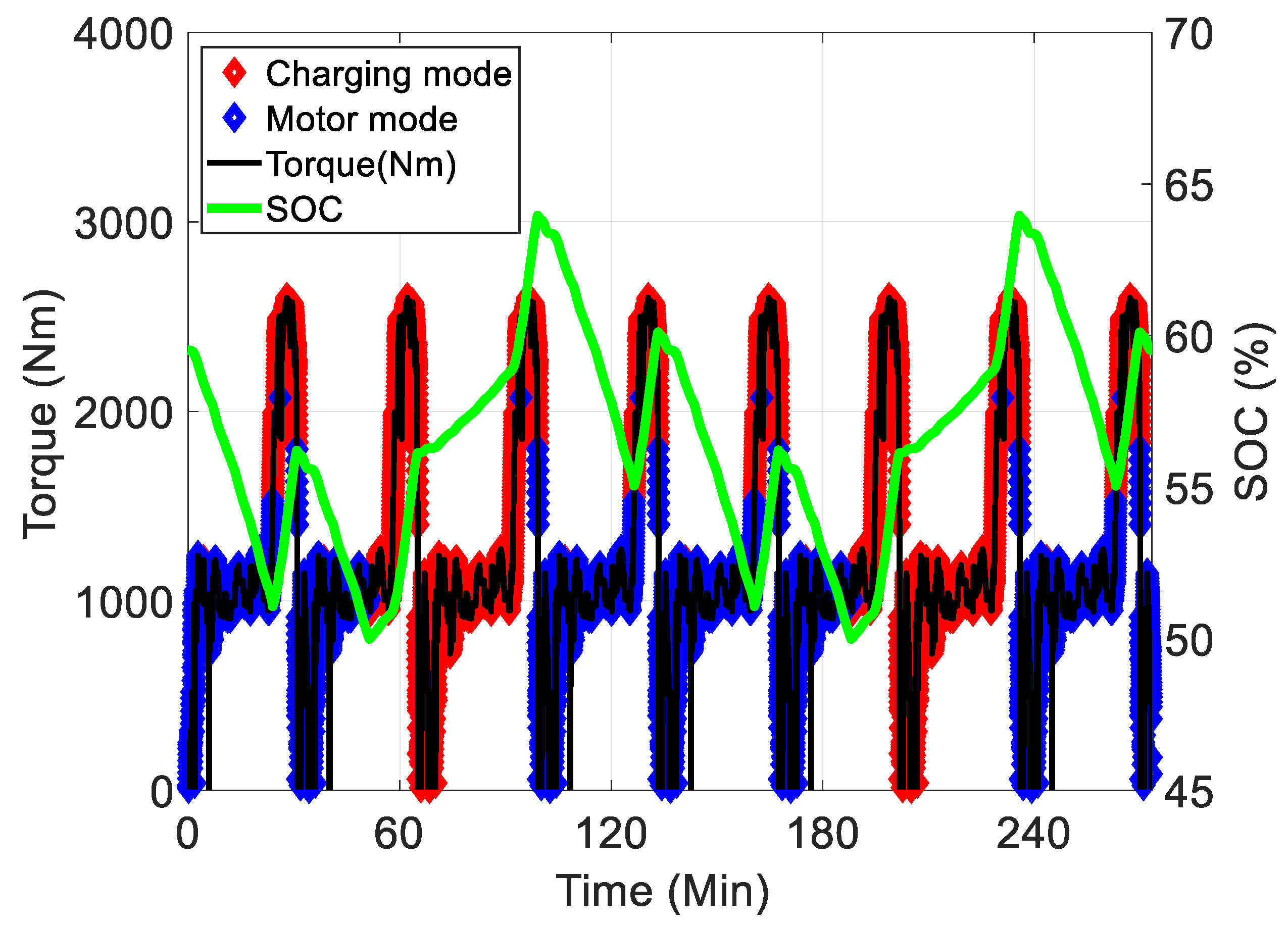
5. Simulation Results
5.1. Performance Analysis Result
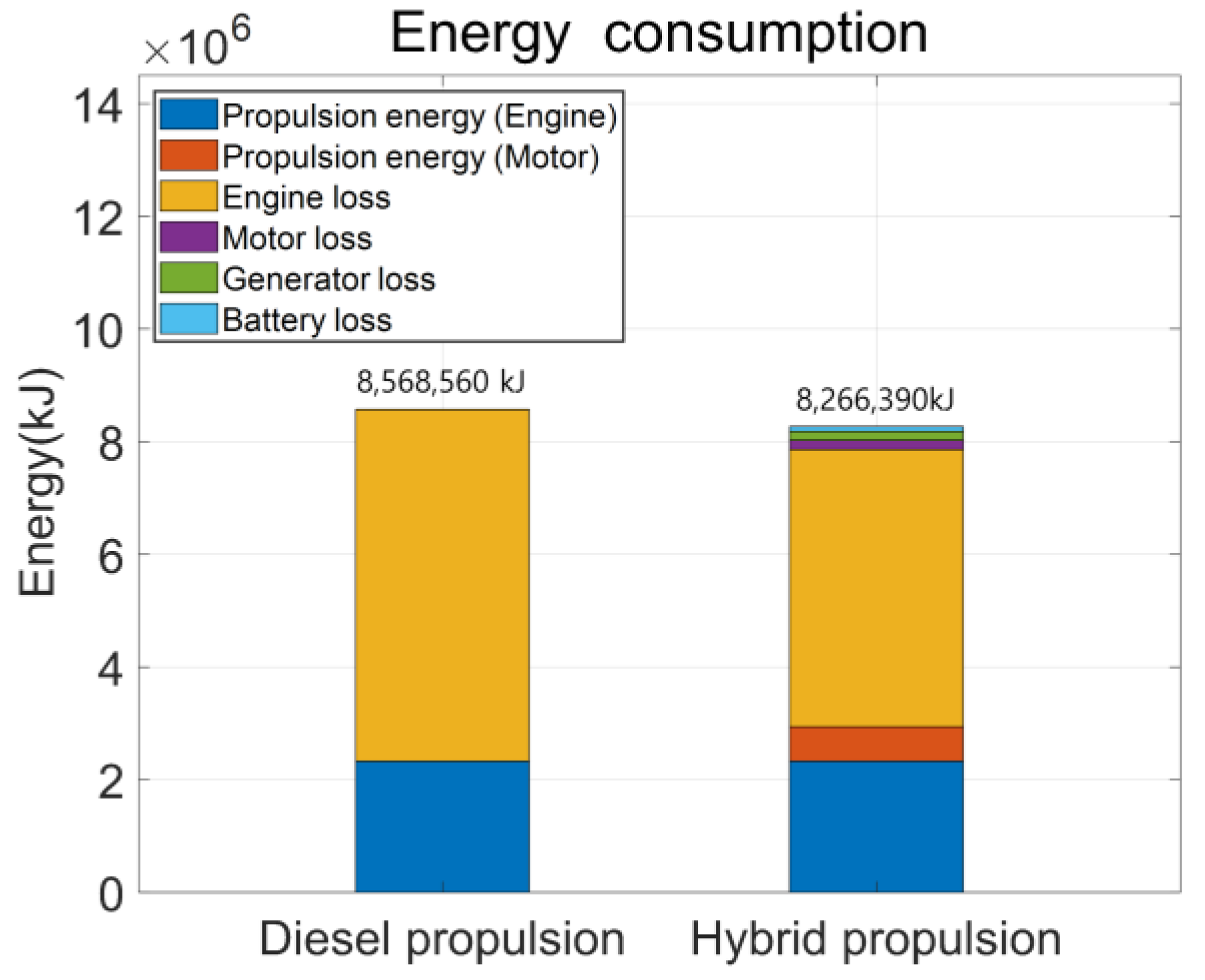
5.2. Comparison with the Diesel Propulsion Powertrain
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| 19.5 m | W.S.A | ||
| 19.5 m | |||
| 7.46 m | 0.785 | ||
| 1.7 m | 0.34 m | ||
| 1.7 m | |||
| 71 ton | 1.7 m | ||
| 0 m | |||
| 14 m | |||
| 0.95 | 2.8 | ||
| 0.746 |
References
- Faber, S.; Hanayama, S.; Zhang, S. Fourth IMO GHG Study 2020-Fianl Report; International Maritime Organization (IMO): London, UK, 2020. [Google Scholar]
- International Maritime Organization. Initial IMO Strategy on Reduction of GHG Emissions from Ships; International Maritime Organization: London, UK, 2018. [Google Scholar]
- Roskilly, A.P.; Palacin, R.; Yan, J. Novel technologies and strategies for clean transport systems. Appl. Energy 2015, 157, 563–566. [Google Scholar] [CrossRef]
- Inal, O.B.; Charpentier, J.-F.; Deniz, C. Hybrid power and propusion systems for ship: Current status and future challenges. Renew. Sustain. Energy Rev. 2022, 156, 111965. [Google Scholar] [CrossRef]
- Hou, J. Control and Optimization of Electric Ship Propulsion Systems with Hybrid Energy Storage. Ph.D. Dissertation, University of Michigan, Ann Arbor, MI, USA, 2017. [Google Scholar]
- Castles, G.; Bendre, A. Economic benefits of hybrid drive propulsion for naval ships. In Proceedings of the 2009 IEEE Electric Ship Technologies Symposium, Baltimore, MD, USA, 20–22 April 2009; pp. 515–520. [Google Scholar]
- Sulligoi, G.; Castellan, S.; Aizza, M.; Bosisch, D.; Piva, L.; Lipardi, G. Active front-end for shaft power generation and voltage control in FREMM frigates integrated power system: Modelling and validation. In Proceedings of the 21st International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 452–457. [Google Scholar]
- de Waard, D.S. Parameterization of ship propulsion drives and their fuel efficiency under different operational modes and configurations. In Proceedings of the Engine as a Weapon VI Conference, Bath, UK, 23 May 2015; pp. 44–57. [Google Scholar]
- Balestra, L. Modelling simulation of a zero-emission hybrid power plant for a domestic ferry. Int. J. Hydrogen Energy 2021, 46, 10924–10938. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach towards standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Sciarretta, A.; Serrao, L.; Dewangan, P.C.; Tona, P.; Bergshoeff, E.N.D.; Bordons, C.; Charmpa, L.; Elbert, P.; Eriksson, L.; Hofman, T.; et al. A control benchmark on the energy management of a plug-in hybrid electric vehicle. Control Eng. Pract. 2014, 29, 287–298. [Google Scholar] [CrossRef]
- Breijs, A.; Amam, E.E. Energy management—Adapt your engine to every mission. In Proceedings of the 13th International Naval Engineering Conference, Bristol, UK, 20–22 July 2016; pp. 1–8. [Google Scholar]
- Caledonian Maritime Assets Limited. Hybrid Ferries Project. Available online: http://www.cmassets.co.uk/project/hybrid-ferries-project/ (accessed on 16 December 2023).
- Wang, X.; Shipurkar, U.; Haseltalab, A.; Polinder, H.; Claeys, F.; Negenborn, R.R. Sizing and control of a hybrid ship propulsion system using multi-objective double-layer optimization. IEEE Access 2021, 9, 72587–72601. [Google Scholar] [CrossRef]
- Silvas, E.; Hofman, T.; Murgovski, N.; Etman, L.F.P.; Steinbuch, M. Review of optimization strategies for system-level design in hybrid electric vehicles. IEEE Trans. Veh. Technol. 2017, 66, 57–70. [Google Scholar] [CrossRef]
- Liu, J.; Peng, H. Modeling and control of a power-split hybrid vehicle. Trans. Control Syst. Technol. 2008, 16, 1242–1251. [Google Scholar]
- Zhang, W.; Maleki, A.; Birjandi, A.K.; Nazari, M.A.; Mohammadi, O. Discrete optimization algorithm for optimal design of a solar/wind/battery hybrid energy conversion scheme. Int. J. Low-Carbon. Technol. 2020, 115, 326–340. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Bui, T.M.N.; Marco, J.; Watts, C.; Yoon, J.I. Optimal energy management for hybrid electric dynamic positioning vessels. IFAC-PapersOnLine 2018, 54, 98–103. [Google Scholar] [CrossRef]
- Bui, T.M.N.; Dinh, T.Q.; Marco, J.; Watts, C. Development and Real-Time Performance Evaluation of Energy Management Strategy for a Dynamic Positioning Hybrid Electric Marine Vessel. Electronics 2021, 10, 1280. [Google Scholar] [CrossRef]
- Sajjad, M.; Shahariar, G.M.; Chu-Van, T.; Suara, K.A.; Zare, A.; Bodisco, T.; Brown, R. Developing a transient drive cycle representing ship acceleration with test-bed engine. In Proceedings of the 22nd Australasian Fluid Mechanics Conference AFMC2020, Brisbane, Australia, 6–10 December 2020; pp. 7–10. [Google Scholar]
- Markel, T.; Brooker, A.; Hendricks, T.; Johnson, V.; Kelly, K.; Kramer, B.; O’Keefe, M.; Sprik, S.; Wipke, K. ADVISOR: A systems analysis tool for advanced vehicle modeling. J. Power Sources 2002, 110, 255–266. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Miller, J.M. Hybrid electric vehicles: Architecture and motor drives. Proc. IEEE 2007, 95, 719–728. [Google Scholar] [CrossRef]
- Geertsma, R.D.; Negenborn, R.R.; Visser, K.; Hopman, J.J. Parallel control for hybrid propulsion of multifunction ships. IFAC-PapersOnLine 2017, 50, 2296–2303. [Google Scholar] [CrossRef]
- Momoh, O.D.; Omoigui, M.O. An overview of hybrid electric vehicle technology. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1286–1292. [Google Scholar]
- Ship Technology. MS Roald Amundsen Polar Cruise Ship. Available online: https://www.ship-technology.com/projects/ms-roald-amundsen-polar-cruise-ship/ (accessed on 16 December 2023).
- Power&Motoryacht. Mochi 23M Hybrid. Available online: https://www.powerandmotoryacht.com/boat-tests/mochi-23m-hybrid/ (accessed on 16 December 2023).
- Chen, D.; Li, X.; Chen, L.; Yang, L.; Tian, F.; Xu, D. Research on Simulation of the Hybrid Electric Vehicle Based on Software ADVISOR. Sens. Transducers 2014, 171, 68–78. [Google Scholar]
- Lewandowski, E.M. The Dynamics of Marine Craft, Maneuvering and Seakeeping; World Scientific: Washington, DC, USA, 2004. [Google Scholar]
- Korotkin, A.I. Added mass of ship structure. In Fluid Mechanics and Its Applications; Academic Press: Cambridge, MA, USA, 2009; Volume 88. [Google Scholar]
- Carlton, J. Marine Propellers and Propulsion; Butterworth-Heinemann: Oxford, UK, 1994. [Google Scholar]
- Nikolopoulos, L.; Boulougouris, E. A Study on the Statistical Calibration of the Holtrop and Mennen Approximate Power Prediction Method for Full Hull Form, Low Froude Number Vessels. J. Ship Prod. Des. 2019, 35, 41–68. [Google Scholar] [CrossRef]
- Holtrop, J.; Mennen, G. An Approximate Power Prediction Method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- Deng, R.; Hu, S.W.Y.; Wang, Y.; Wu, T. The Effect of Hull Form Parameters on the Hydrodynamic Performance of a Bulk Carrier. J. Mar. Sci. Eng. 2021, 9, 373. [Google Scholar] [CrossRef]
- Norbakyah, J.S.; Atiq, W.H.; Salisa, A.R. Power requirements for PHERB powertrain. IOP Conf. Ser. Mater. Sci. Eng. 2015, 100, 012035. [Google Scholar] [CrossRef]
- Ding, N.; Prasad, K.; Lie, T.T. Design of a hybrid energy management system using de-signed rule-based control strategy and genetic algorithm for the series-parallel plug-in hybrid electric vehicle. Energy Res. 2021, 45, 1627–1644. [Google Scholar] [CrossRef]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategy for a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]








| Symbol | Particular | Symbol | Particular |
|---|---|---|---|
| Waterline length | W.S.A | Wetted surface area | |
| Length between perpendiculars | Total wetted surface area | ||
| Molded breath | Prismatic coefficient | ||
| Draft | Height of the centroid | ||
| Volumetric displacement | Draft at the fore perpendiculars | ||
| Displacement | Draft at the after perpendiculars | ||
| Trim | Stem contour | ||
| Normal section shape | Ship speed | ||
| Midship section coefficient | Longitudunal center of buoyancy from after perpendiculars | ||
| Block coefficients | Appendage resistance factor | ||
| Form factor |
| Descriptions | Values |
|---|---|
| Type | Offshore Support |
| Overall length | 19.52 m |
| Width | 7.46 m |
| Draught | 1.70 m |
| Gross tonnage | 65.24 t |
| Diesel engine | 1440 kW |
| Electric motor | 450 kW |
| Battery | 450 kWh |
| 1126.4 V | |
| Maximum speed | 12 m/s |
| Cruising speed | 11 m/s |
| Diesel Propulsion | Hybrid Propulsion | ||
|---|---|---|---|
| Distance | 67.87 km | ||
| Engine efficiency | 0.271 | 0.303 | |
| Motor efficiency | Motoring | - | 0.78 |
| Generating | - | 0.798 | |
| Overall efficiency * | 0.271 | 0.303 | |
| Fuel consumption (kg) | 200.2 kg | 179.2 kg | |
| Improvement | 10.4% | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, S.H.; Kim, D.M.; Kim, S.J. A Back–Forward Approach-Based Efficiency Performance Analysis Model for Hybrid Electric Propulsion Ships Using the Holtrop–Mennen Method. J. Mar. Sci. Eng. 2024, 12, 9. https://doi.org/10.3390/jmse12010009
Hong SH, Kim DM, Kim SJ. A Back–Forward Approach-Based Efficiency Performance Analysis Model for Hybrid Electric Propulsion Ships Using the Holtrop–Mennen Method. Journal of Marine Science and Engineering. 2024; 12(1):9. https://doi.org/10.3390/jmse12010009
Chicago/Turabian StyleHong, Soon Ho, Dong Min Kim, and Sun Je Kim. 2024. "A Back–Forward Approach-Based Efficiency Performance Analysis Model for Hybrid Electric Propulsion Ships Using the Holtrop–Mennen Method" Journal of Marine Science and Engineering 12, no. 1: 9. https://doi.org/10.3390/jmse12010009
APA StyleHong, S. H., Kim, D. M., & Kim, S. J. (2024). A Back–Forward Approach-Based Efficiency Performance Analysis Model for Hybrid Electric Propulsion Ships Using the Holtrop–Mennen Method. Journal of Marine Science and Engineering, 12(1), 9. https://doi.org/10.3390/jmse12010009