1. Introduction
Over the past few decades, the challenges associated with designing manned vehicles, characterized by complex layouts, high costs, and low efficiency, have prompted a rapid and distinct development of unmanned vehicles. This evolution is particularly notable in the realms of unmanned aerial vehicles (UAVs) and unmanned underwater vehicles (UUVs) [
1,
2,
3]. To enhance the exploration and utilization of marine resources, as well as to meet military requirements, countries worldwide are consistently advancing diverse and innovative unmanned platforms [
4]. Traditional UAVs typically operate within a single medium, posing challenges in adapting to the progressively complex task requirements. This led to the emergence of an amphibious air–water cross-media vehicle capable of efficiently functioning in two distinct media conditions.
Proposing the military four-in-one safety concept encompassing sea, land, air, and space as the ultimate frontier of security underscores the paramount importance of UAV development. This is particularly significant, with a spotlight on the recently introduced cross-medium vehicle concept [
5,
6]. On the civilian front, traditional underwater robots and drones deployed on ships face limitations, especially in tasks like marine resource surveys. The emergence of transmedia vehicles, however, provides a positive direction in this area. Additionally, the UAAV, as a cross-medium vehicle, offers a distinct advantage over underwater vehicles. It can transition into the air to reduce drag when high-speed travel is necessary [
7]. Hence, maneuver control of cross-medium vehicle systems has evolved into a captivating subject, given its vast potential applications in missile launches, environmental monitoring, and submarine surfacing [
8,
9,
10].
In terms of motion control, the UAAV performs alternating maneuvers in both air and water, resulting in abrupt changes in propeller forces and rudder moments. In reference [
11], an aerodynamic and hydrodynamic model of angular motion was established for a transmedia vehicle featuring a quadrotor layout. Building upon this, a method was introduced for stabilizing water emergence control of a transmedia vehicle in the longitudinal plane. The study delves into the impacts of additional mass and inertial forces on the water emergence process during transmedia motion. Moreover, disturbances in the liquid and intricate collisions between the vehicle and the liquid can negatively impact the motion control of the UAAV, therefore compromising the stability and overall performance of the vehicle. During the execution of a water-exit maneuver, a trajectory tracking controller is established according to [
12] to meet the requirements for a large-angle water outlet.
The backstepping control method proves more effective in addressing the nonlinearity issue in motion control [
13,
14,
15]. Conversely, the adaptive control algorithm demonstrates a lesser sensitivity to changes in the model parameters of the controlled object. When combined with insights into control-method switching, the application of these methods to cross-medium vehicle control problems becomes profoundly significant for advancing research in cross-medium vehicle control.
The UAAV consistently contends with intricate external disturbances originating from wind, waves, and currents. Particularly at the water–air interface in oceans and lakes, it tends to be more susceptible to external environmental influences. Consequently, the maneuverability of the UAAV in such conditions is notably hampered by the coupling hydrodynamics. Throughout the water emergence process, the UAAV undergoes significant changes in fluid dynamics and is additionally influenced by external factors, notably wind and waves [
16]. The critical stage for the UAAV is the exit phase at the water surface and air juncture, where the external environment is exceptionally complex, leading to inevitable interference. Therefore, considering these external interferences, ensuring effective maneuver control of the vehicle becomes imperative.
To enhance the control capabilities, a disturbance observer was developed specifically for the disturbances caused by wind and waves [
17,
18,
19]. Building upon this, the environmental load associated with wind and waves in the subsequent moment was estimated and integrated into the vehicle’s controller, enabling the determination of the vehicle’s motion state. The interference observer not only assesses the external environmental load on the vehicle but also provides a level of compensation to enhance the controller’s resistance to interference. To align the control research of the vehicle with the real scenario during this stage, adjustments were made to the kinematics and dynamics models of the vehicle in the exit phase. The interference forces and torques acting on the vehicle were meticulously analyzed and modeled [
20]. This paper concentrates on the vehicle’s exit stage, where a trajectory tracking controller is designed. The interference estimation results are then compared with pre-designed interference to evaluate the interference estimator’s effectiveness. Finally, simulation verification of the motion control process is conducted.
Currently, there is a scarcity of studies addressing maneuver control issues for UAAVs that account for complex disturbances at the air–seawater interface. The primary challenge in this domain lies in the fact that the unknown and intricate environment can hinder the vehicle’s proper and smooth movement. Notably, the UAAV may experience thrill, leading to the unstable movement of the entire system. In response to these challenges, this article introduces an adaptive backstepping control algorithm integrated into a disturbance observer scheme for the UAAV system, considering the presence of coupling disturbances. In comparison to existing works, the innovations of this study can be summarized as follows:
(1) We will introduce an adaptive backstepping control scheme designed for the fixed-wing UAAV system. Unlike conventional backstepping approaches [
14,
15], our method dynamically accommodates changing system dynamics, enhancing its adaptability and performance in real-world applications. Moreover, the proposed control scheme exhibits remarkable robustness against complex coupling interferences, which holds significant importance in practical engineering applications. In contrast to PD control [
11], backstepping control is a nonlinear technique that systematically addresses complex and nonlinear system dynamics. It employs a recursive design approach, developing the control law step by step, with a focus on canceling out nonlinearities and ensuring system stability.
(2) The kinematic and dynamic models of the UAAV are formulated by altering the order of Euler transformations to account for the motion characteristics during the water-exit process. Subsequently, the considerable nonlinearities and robust coupling inherent in the out-of-water phase, along with time-varying parameters, are addressed. The stability of UAAV control during the out-of-water motion phase was then verified.
(3) The disturbance force and moment resulting from wind and wave loads on the vehicle are analyzed and modeled. Given that the roll angle and bow angle can be approximated as small quantities, the fixed-wing cross-medium vehicle can be simplified as a 4-DOF model. Subsequently, a disturbance observer is designed to estimate wind and wave disturbance loads, which are then used as inputs for the external force of the UAAV dynamic system. Building upon the designed disturbance observer and controller, a mathematical model for wind and wave disturbances is established to facilitate stability analysis.
The structure for the remaining sections of this article is outlined as follows.
Section 2 introduces the maneuvering model of the UAAV, encompassing both kinematic and kinetic models.
Section 3 establishes models for external environmental disturbances, including winds and waves. The core processes of the motion control algorithm are detailed in
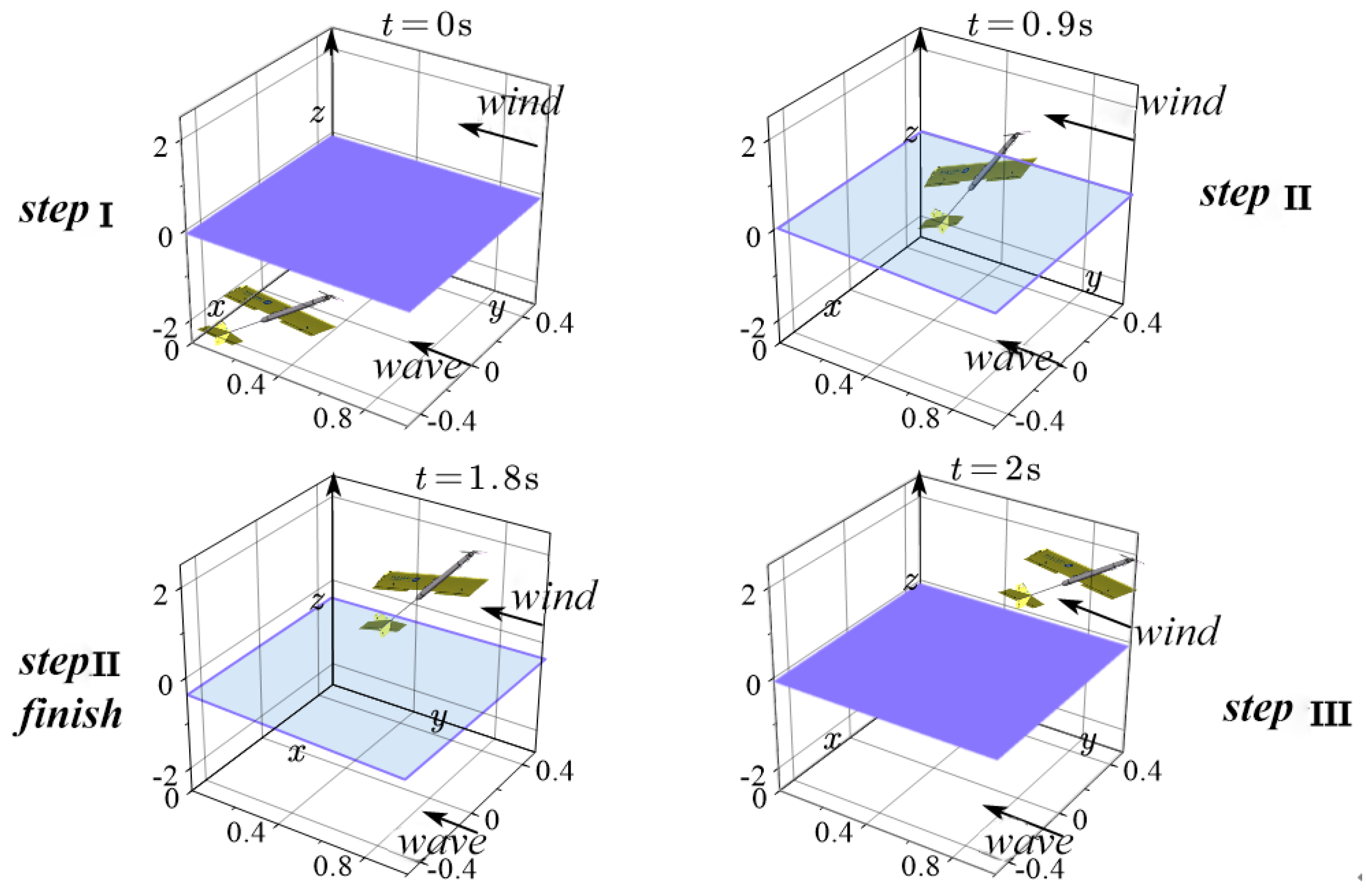
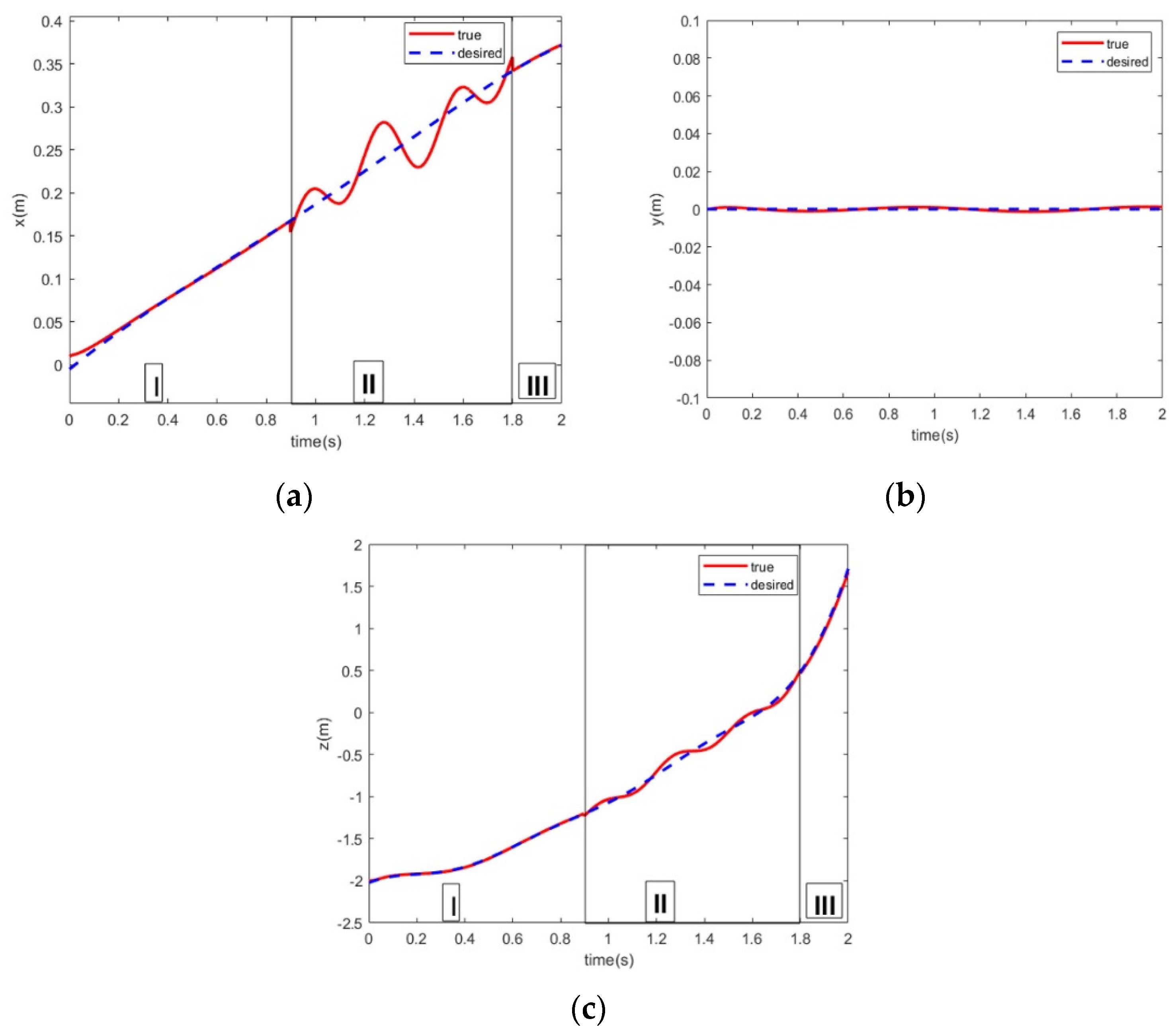
Section 4. The effectiveness of the proposed control protocol is demonstrated through numerical simulations in
Section 5. Finally,
Section 6 provides concluding remarks.
2. The Maneuvering Model of UAAV
In this section, we will address a foundational concern by first presenting the kinematics and dynamics model of the UAAV. The kinematics and dynamics models of cross-medium vehicles can be categorized into three types based on the medium in which they operate: the underwater movement stage, the air flight stage, and the cross-medium emergence stage. In particular, the cross-medium emergence stage holds significance for the entire maneuver mission, serving as a cornerstone for subsequent research on control methods for cross-medium vehicles.
2.1. The Kinematic Model of UAAV
This subsection primarily delves into the motion modeling of the cross-medium vehicle, emphasizing that a well-founded motion model serves as the bedrock for subsequent research on control methods. The UAAV represents a novel aircraft capable of navigating in both air and underwater environments. Moreover, the precision of the motion model establishment directly impacts the accuracy of subsequent issues such as attitude control, speed control, and trajectory tracking. The kinematics and dynamics models of cross-medium vehicles are categorized based on the medium in which they operate, including the underwater movement stage, the air flight stage, and the cross-medium exit stage.
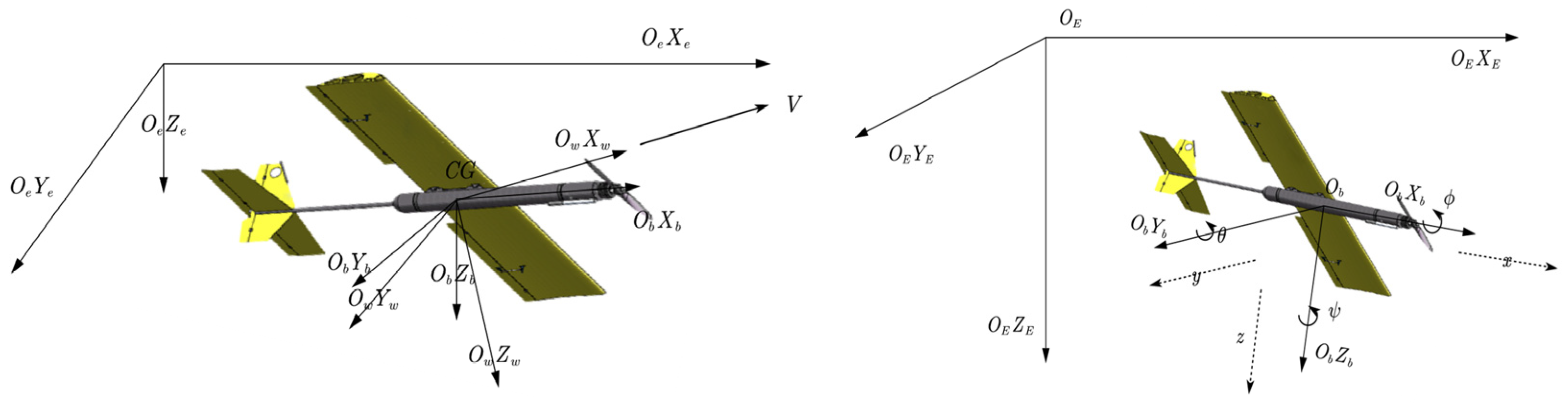
Modeling the UAAV system encompasses understanding both its dynamics and statics. Statics involves the equilibrium of the vehicle under uniform velocity or at a stationary position, while dynamics pertains to the accelerated motion of the vehicle. Kinematics focuses on the geometrical aspects of the vehicle’s motion, whereas kinetics addresses the forces responsible for the motion of the UAAV. Consequently, the motion of the UAAV in geodetic and body coordinate systems is illustrated in
Figure 1.
Where represents the body coordinate system, represents the geodetic coordinate system, represents the velocity coordinate system.
In the delineation of the aforementioned coordinate system, the six degrees of freedom of the vehicle are described, encompassing both translational and rotational motion. The underwater gliding of the vehicle and the description of its six degrees of freedom movement can be referenced using the symbol system of the International Towing Tank Conference (ITTC) and the Society of Naval Architecture and Marine Engineering (SNAME) [
21]. In particular, the motion model can be described as
where
stands for the rotation matrix between
and
, which is defined by:
is used to describe the position of the UAAV. denotes the velocity in the global coordinate system. stands for the linear velocity and represents the rate of change in the Euler Angle. denotes the velocity in the body coordinate system, stands for the linear velocity, and represents the rotating angular velocity. denote the , , , respectively. More specifically, express the linear displacement of surge, sway, and heave direction, respectively. show the rotation angle in the above three directions. express the corresponding angular spin rate.
2.2. The Dynamics Model of UAAV
Professor Fossen [
22] from Norway proposed a simplified version in vector form for the dynamic equation of six degrees of freedom for rigid bodies, which can be expressed as:
where
denotes the inertia matrix.
represents the Coriolis force and centripetal force matrix.
is the designed control force and moment, where
is the longitudinal force, the lateral force, and the vertical force of the vehicle, and
is the transverse moment, trim moment and yaw moment of the vehicle. Concretely, the inertia matrix can be expressed as follows:
where
satisfies the symmetric property and is a constant matrix, i.e.,
. Additionally, the Coriolis force matrix also can be shown as follows:
4. Control Algorithm Design
Given that the UAAV primarily focuses on positional quantities in the longitudinal plane during the water emergence process, the roll angle and bow angle can be approximated as small quantities, i.e.,
and
. The kinematics and dynamics model can be simplified from Equations (1) and (3) to a mathematical model of longitudinal in-plane plus transverse displacement, i.e., a mathematical model of 4-DOF. The specific form of the state space can be expressed as:
where
is the state variable of the system, i.e., linear and angular displacements in the longitudinal plane in the geodetic coordinate system;
are the first order state variables of the system, i.e., linear and angular velocities in the longitudinal plane of the body coordinate system;
is the output of the system that indicates the position and attitude state of the vehicle.
indicates the inputs to the control system, i.e., the inputs to the control forces and moments of the vehicle.
indicates the disturbance of the control system. In this paper, the three phases use a unified disturbance to avoid the critical point in each phase of the control force, which appears to jump to ensure that the response of the control system is continuous.
is the inverse of the quality matrix in the control system;
is the transformation matrix in the kinematic model equation in the case of 4-DOF, which is the transformation matrix of linear and angular velocities in the airframe coordinate system to the geodetic coordinate system position and attitude.
is the product of the inverse of the mass matrix in the control system and the forces and moments, including static forces: gravity and buoyancy, hydrodynamic forces: inertial and viscous forces [
26], in addition to the control forces and moments, as well as the slight disturbance forces designed in this paper, i.e.,
.
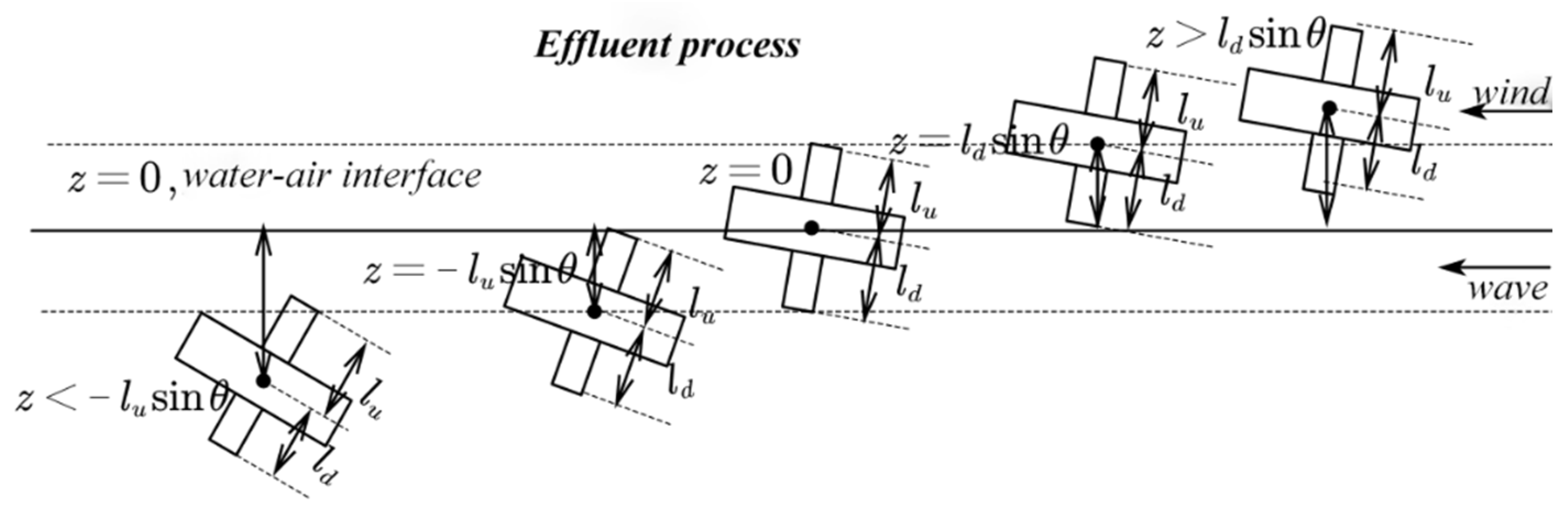
To facilitate a more effective analysis of the control laws during the out-of-water process, an equivalent approach is employed to conceptualize the navigator as comprising a cylindrical body and approximately rectangular wings. Define the distance from the center of mass to the upper and lower bottom surfaces as
and
, respectively.
is the height of the center of mass of the vehicle, defining
as the interface between water and air;
denotes air;
denotes water. The emergent state is partly in the water and partly in the air and is expressed as a range of
. The craft completely in the water is expressed as
, and completely in the air is expressed as
. Such situations are handled when the dynamics are written in a particular way, and a switched controller is designed [
27] to tackle such dynamics. A schematic diagram of UAAV exiting the water across the medium in the presence of wind and wave disturbances is shown in
Figure 2.
In what follows, the specific steps of the backstepping method of designing a control law will be stated.
Step 1: The error variable and Lyapunov function of the trajectory tracking controller are first defined as
where
denotes the desired exit trajectory of the navigator, for which the control system needs to guarantee a second-order continuously derivable;
denotes the Lyapunov energy function of subsystem 1 used to determine whether the designed controller is asymptotically stable. Subsystem 1 is defined as
where
is the virtual control law and can be designed as
where
is the designed control parameter and satisfy
.
Define the new error variable
, the derivative of the Lyapunov function of the system can be calculated as
The asymptotic stability of the controller requires that the Lyapunov function be negatively determined, so the new error variable must be zero, and the design of the controller subsystem 2.
Step 2: Define the new error variable
and the corresponding Lyapunov function as
On the premise of ignoring the disturbance force, the actual system will be established. In the subsequent nonlinear disturbance, the observer will give the disturbance on the UAAV:
Thus, the actual control law is designed as
where
is the designed control parameter and satisfy
and the dimensions of the column matrix are related to the system.
Substituting the above-proposed controller into the Lyapunov function
, yields
where
.
To proceed, the Lyapunov function of the actual system is satisfied to be negative definite, and the control law designed based on the backstepping method satisfies the asymptotic stabilization requirement of the closed-loop system.
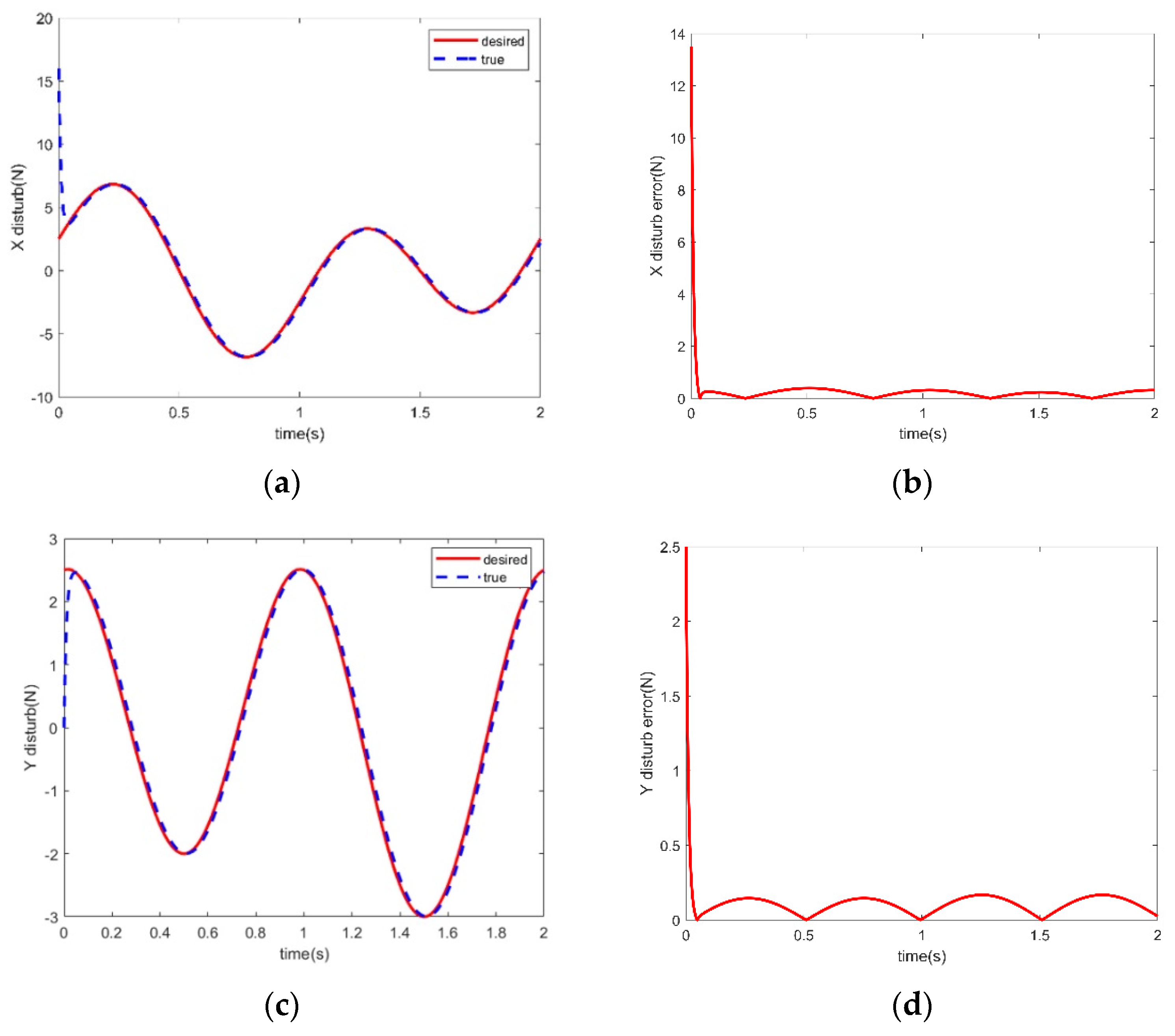
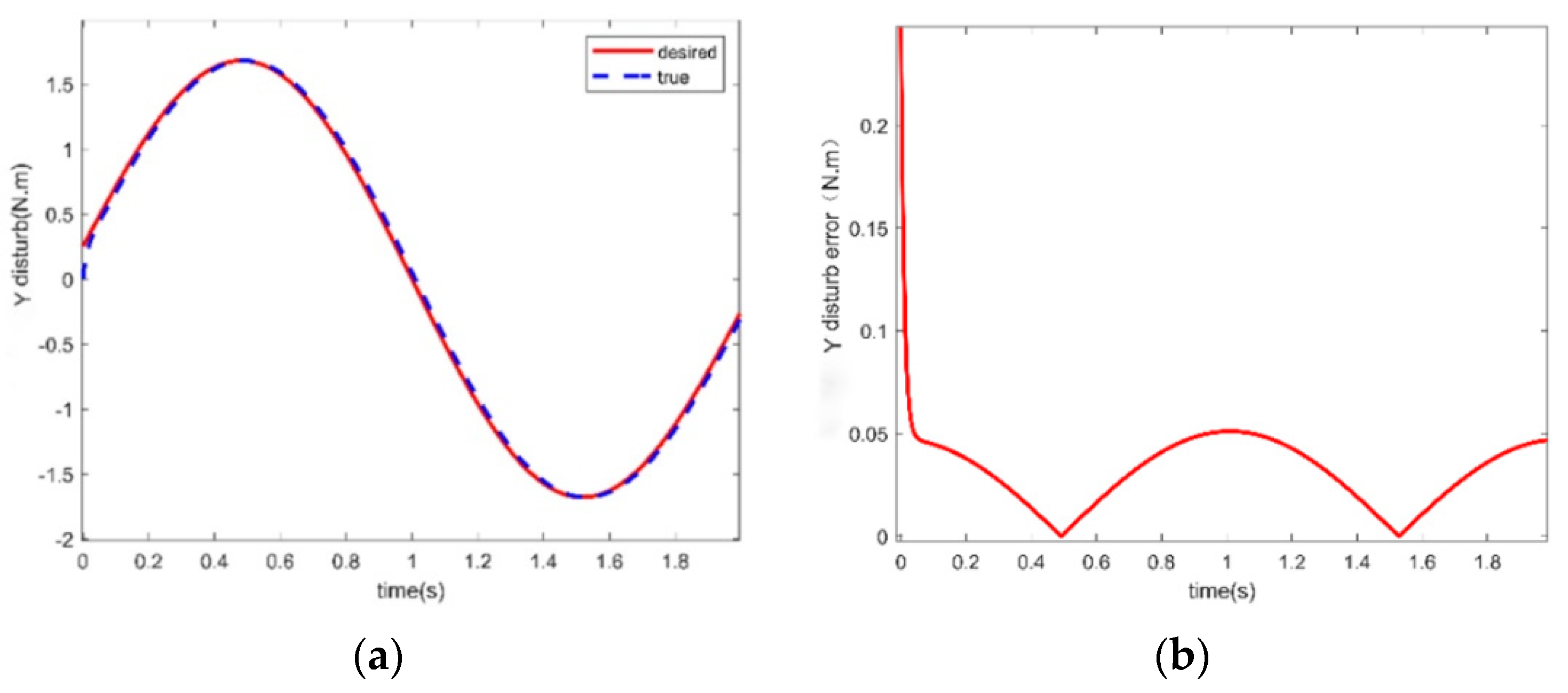
In what follows, the nonlinear disturbance observer will be established to estimate the interference forces and moments near the surface. Designing a nonlinear disturbance observer to estimate the effect of near-surface disturbances on the control system as follows:
with
in which
and
can be obtained by
where
denotes the observation of the system disturbance by the nonlinear disturbance observer;
is the nonlinear term;
is a large enough control parameter that can be adjusted by users.
and
satisfy
and
.
Please see [
28] for the convergence proof of the above observer.
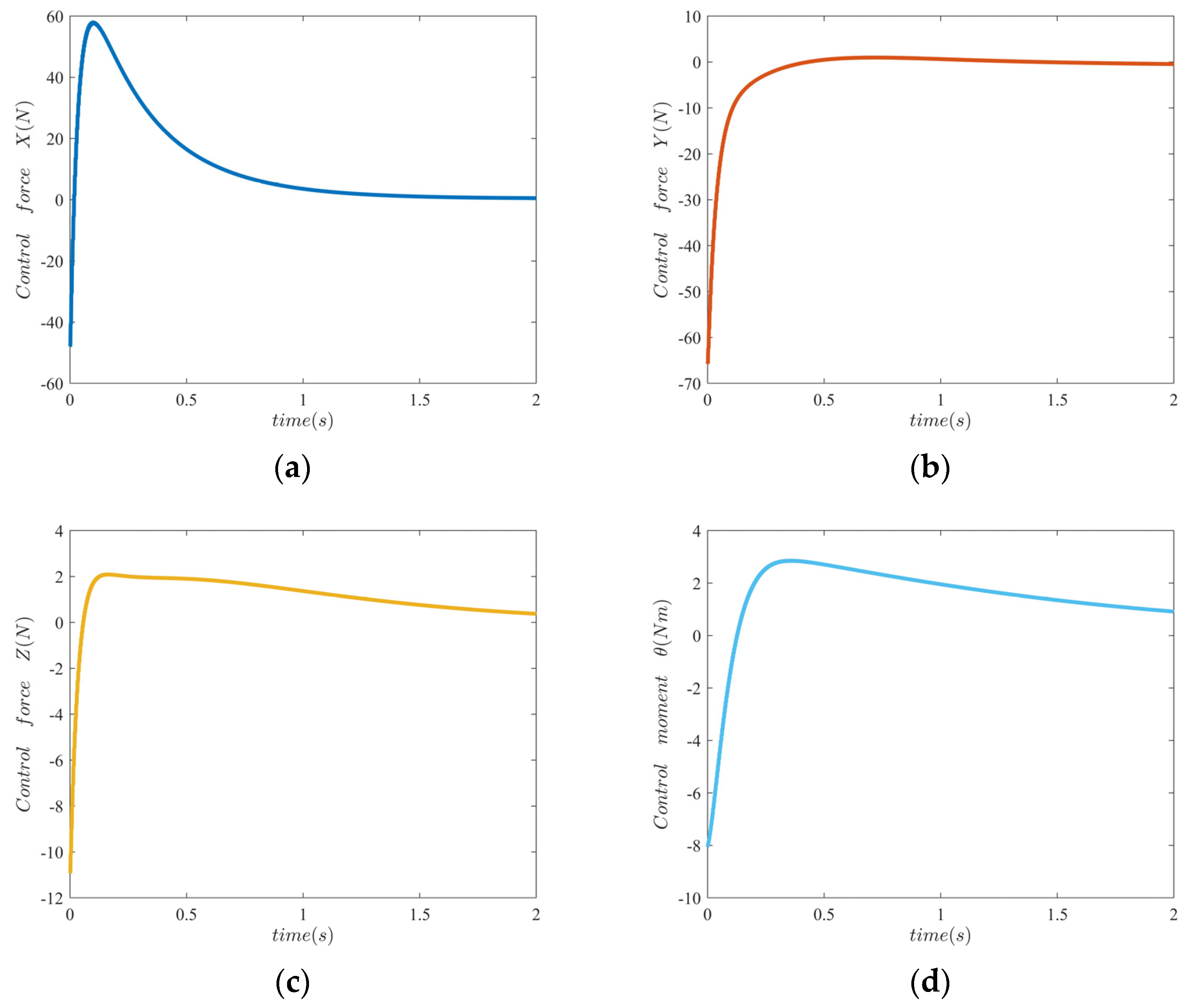
The controller is comprised of an inner loop for attitude control and an outer loop for position control. A nonlinear interferer is designed to estimate interference to the transmedia navigator, and the controller utilizes backstepping to achieve nonlinear control during the transmedia phase. Taking into account the coupling external handover interface disturbance, the final actual control law can be designed as follows:
where
and
are the control parameters of the control law. Those are positive user-defined constants.
and
are the defining tracking error;
is the derivative of the desired trajectory;
is the estimates of nonlinear interference observers;
and
are the compensated tracking error. The design of the controller and control law for the UAAV in the out-of-water stage has been completed, laying the foundation for the subsequent motion control simulation.
Remark 1. For the designed control algorithm, the rule in parameter selections can be summarized as follows. According to the above theoretical analysis and the subsequent simulation experience, increasing and can improve the control accuracy and speed up the convergence, but also increase the control torque. Therefore, it is necessary to weigh the control performance, power consumption, and other indicators of the control system comprehensively.
Taking the derivative of
and substituting the above-proposed controller into the Lyapunov function
, yields
where
,
is the error resulting from the observer. Thus, it can be concluded that the error variable is stable. It is worth mentioning that the error converges to zero as long as
.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}