1. Introduction
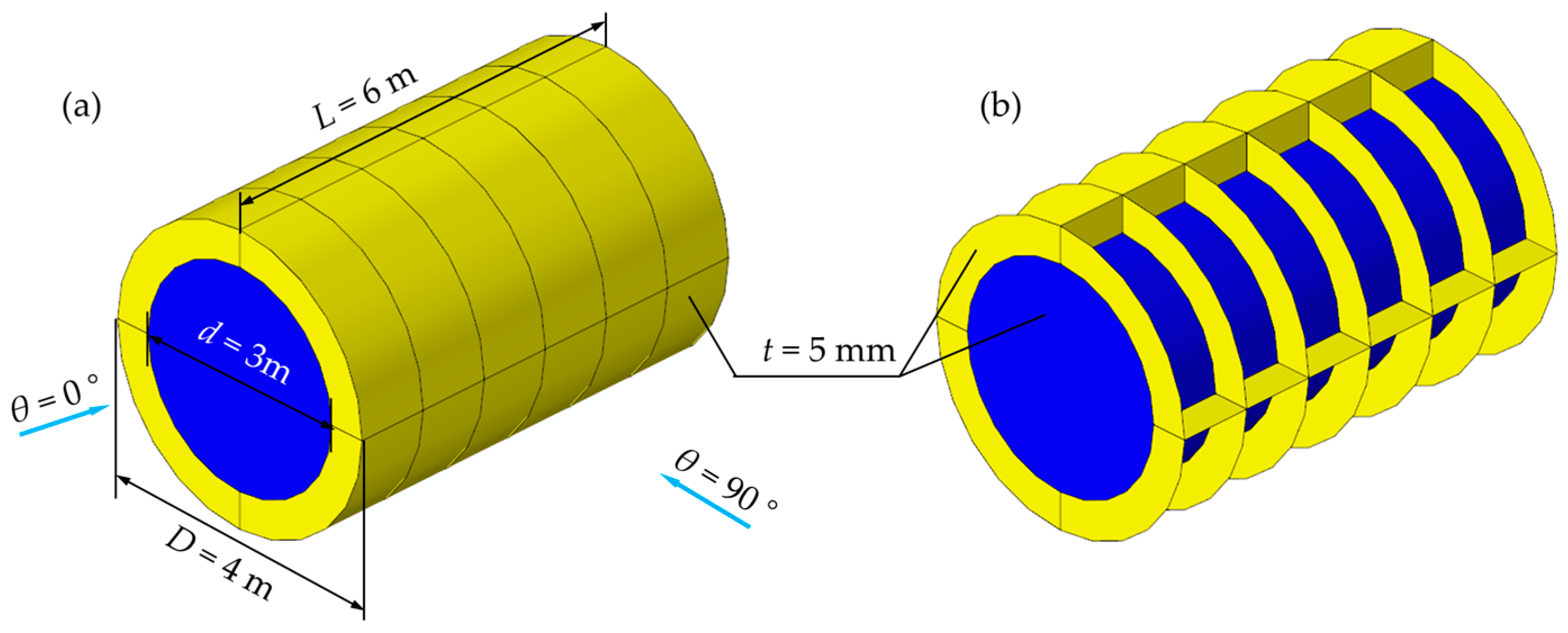
Underwater vehicles are extensively utilized devices in ocean resource exploration and marine defense technology. Due to sonar detection and acoustic stealth demand, acoustic backscattering issues of both underwater vehicles and detecting targets are always drawing concerns from researchers in this field. In this work, the ribbed double cylindrical shell, which is a commonly used structure in underwater vehicles, is chosen as the target to discuss the acoustic backscattering of structures with multiple-layered shells, the outer surfaces of which incident acoustic waves can penetrate through and the existence of inner structures can make contributions to total backscattering.
The research on acoustic backscattering dates back to the works of Rayleigh [
1]. He initiatively gave a mathematical expression of the scattering of sound. Due to the limitation of the complexity of the expressions, he only considered some simple cases in which the size of the scatterer was relatively small compared to the incident wavelength. Based on Rayleigh’s work, considering the limitation on scatterer size, Morse [
2,
3] applied partial wave series (PWS) to separate the complicatedly dependent variables in the Helmholtz equation and the acoustic scattering solution of some simple scatterers like a rigid sphere and an infinite cylinder in a liquid medium was acquired. Following Morse’s works, Faran [
4] and Junger [
5] extended the PWS into the backscattering prediction of elastic scatterers like isotropic cylinders/sphere solids and shells. They found that for scatterers whose density is greater than the liquid external medium, if the incident wave frequency is higher than the first-order free-vibration mode of the scatterer, the scattering pattern of the elastic scatterer no longer fit with the rigid counterpart and the scattering pattern of the elastic scatterer changed drastically when a small change in frequency occurred in the vicinity of the scatterer’s free-vibrating modes.
Due to the limitation of analytical methods imposed on the scatterer’s geometry, some numerical and semi-numerical methods were developed. Stanton [
6,
7,
8] proposed the deformed cylinder method (DCM). This method can cope with the scattering of deformed cylinders of finite length and, thus, most ocean objects such as marine organisms, sand ripples, and ice keels can be considered by this method as they can be approximated as elongated objects. Another frequently applied semi-numerical method is the Transition matrix (T-matrix) method proposed by Waterman [
9,
10] to cope with the backscattering of rigid and elastic scatterers. Recently, Gong proposed applications of this method to the backscattering issues of spheroid and capsule-shaped structures [
11,
12]. Although great efforts have been made by these semi-numerical methods, the shape of the considered scatterers is still limited in variety. With the rapid development of the finite element (FEM) and boundary element methods (BEM), these two methods were introduced to the acoustic field and vastly applied in studying backscattering problems of all kinds of objects [
13,
14,
15,
16,
17,
18]. Benefiting from the fruitful theoretical foundations of these methods, the backscattering of complex scattering in complex conditions can be determined easily. Recently, some extended methods like the smooth finite element method (SFEM) and meshfree method have been applied [
19,
20,
21,
22,
23,
24,
25,
26,
27]. Although the flexibility of these methods can never be worried about, there is a common disadvantage of these rigorous numerical methods in that the efficiency of these methods plunges sharply with an increase in frequency due to the fact that refined meshed is necessary for high-frequency models.
Considering the efficiency of high-frequency and large-scale models, an asymptotic method called the Kirchhoff approximation (KA), also known as physical acoustics (PA), is introduced. The KA regards the backscattering of the scatterer as the Helmholtz integration of the illuminated regions. Urick [
28] referenced Kerr’s [
29] work on the radar cross section and gave the backscattering target the strength of some rigid simple structures using the KA. Later, Gordon [
30] worked out the explicit expression of the Helmholtz integration of a flat polygonal element, and his contribution made it possible to approximate the total backscattering of an arbitrary surface as the sum of a series of planar elements. Fan [
31,
32] solved the discretized KA models with Gordon’s integration, and the planar element method (PEM) was formed to efficiently cope with the backscattering of large-scale and high-frequency models. Since the expression of Gordon’s integrations is independent between elements, the integration procedure of the discretized KA can be easily processed through a parallel program. In the electromagnetic field, the computer 3D graphical rendering technique is introduced to parallelly consider electromagnetic scattering [
33,
34]. Likewise, this thought is introduced to the acoustic field to form the graphical acoustic computing (GRACO) method [
35,
36]. Aided by the efficient and reliable graphical rendering technique, the time cost of KA is shortened to a striking degree.
In the current work, GRACO is applied to study the backscattering issues of multiple-layered structures. The ribbed double shell is taken as an example. In many previous works of research on KA-based backscattering issues, the scatterer is regarded as a rigid or impedance surface. The acoustics cannot penetrate through the outer surface of the scatterer. Thus, the contribution of the inner structure is usually abruptly overlooked. In this paper, the depth peeling (DP) technique [
37], which is usually used to cope with the rendering of semi-transparent objects, is combined with the traditional GRACO method to deal with the backscattering of multiple-layered structures.
The remainder of this paper is organized as follows: In
Section 2, a brief introduction of the Kirchhoff approximation is given; additionally, the discretized scheme of the traditional KA as well as the GRACO method are introduced; moreover, the hidden surface elimination operations of the traditional routine and Z-buffer are compared; at last, the implementation of DP into GRACO is briefed. In
Section 3, the target strength of some examples such as a sphere, a benchmark, a pair of circular plates, and a ribbed double shell is considered with different methods, and the results of different methods are compared to narrate the advantages of GRACO–DP. In
Section 4, the conclusions are given.
2. Theories and Methods
2.1. The Integral Equation and the Kirchhoff Approximation
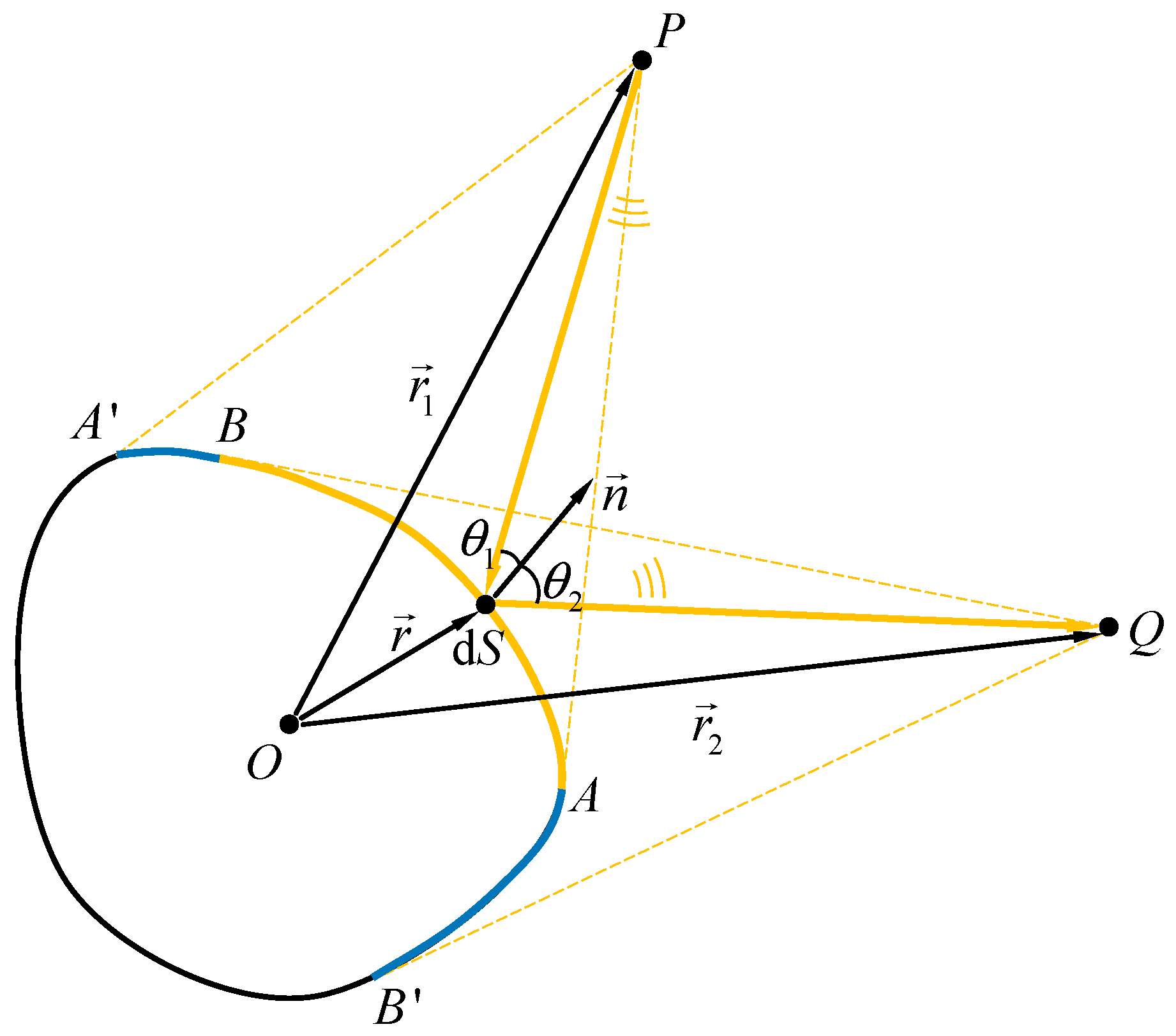
As shown in
Figure 1, an object with surface
S is insonified by a far-field point source
P. The incident velocity potential over the target surface is
where
k is the acoustic wave number in water. According to the Kirchhoff integral equation of acoustic scattering [
3], the scattering potential at observation point
Q is
There is usually no analytical solution for an object with a complex shape according to Equation (2). Thus, the Kirchhoff approximation (KA) is a frequently used method to cope with complex-shaped models. In the KA, there are two hypotheses included to simplify the acoustic scattering model: (1) only the scattering contribution of the illuminated region is considered; (2) the tangent plane approximation. Only considering the illuminated region means that the shadowed region
and the penumbra regions
and
are excluded from the integral area, and the total scattering integration can be approximated by integration over the illuminated region:
The tangent plane approximation suggests that the scattering character of the points on the scatterer surface is approximated to a cluster of planar elements with the properties of infinite tangent planes. Therefore, the scattering velocity potential on the target surface can be approximated by the reflecting model of an infinite plane insonified by the plane wave
where
is the reflection coefficient at the scattering point and
is the angle between the vector of the incident wave and the normal of the scattering point. Furthermore, the ratio of total acoustic pressure to total normal vibration velocity at the surface is equal to the acoustic impedance of an infinite plane:
where
ω and
ρ are angular frequency and water density, respectively, and
Zn is the acoustic impedance of the target surface. The relation between the acoustic impedance and the reflection coefficient can be expressed as
where
c is the water acoustic velocity. Substituting Equations (4)–(6) and Green’s function into Equation (3), the acoustical velocity potential of receiving point P can be expressed as
For the backscattering problem, the source point
P and the observation point
Q are at an identical position, and the variables related to
P and
Q can be combined together. That means,
and
. Therefore, the scattering velocity potential at the observation point can be expressed as
where
The backscattering velocity potential can be obtained with the integration of Equation (9). For a target surface of complex shape, the integration of Equation (9) cannot be obtained directly. Some discretization techniques can be applied to simplify the complex surface into a series of simple planar elements and the scattering potential integral can be acquired by summing up the integrations over each element. In an underwater sonar system, the target strength (TS) is a much more commonly used parameter to describe the stealth of the underwater target. It is defined as the log value of the ratio between the equivalent backscattering acoustic intensity at a position one unit of distance from the acoustic center and the incident acoustic intensity at the acoustic center:
where
is the acoustic intensity of the scattering field,
is the incident acoustic intensity,
is zero vector,
is the vector from the origin
O to the source (observation) point
P,
= 1 m is the unit length and is omitted here due to the SI used in the current study. For simple shapes, the integration of
I can be easily solved. However, when coping with complex surfaces, it is impossible to acquire the integration over these surfaces, and some discretization technique is needed to simplify this problem. What should be mentioned is that the
is not deleted in the integration of
I. This is because in the following discretization procedures, the reference point of different elements varies, and the
term generates a phase difference between different elements.
2.2. The Discretization Schemes for Kirchhoff Approximation
2.2.1. The Planar Element Method
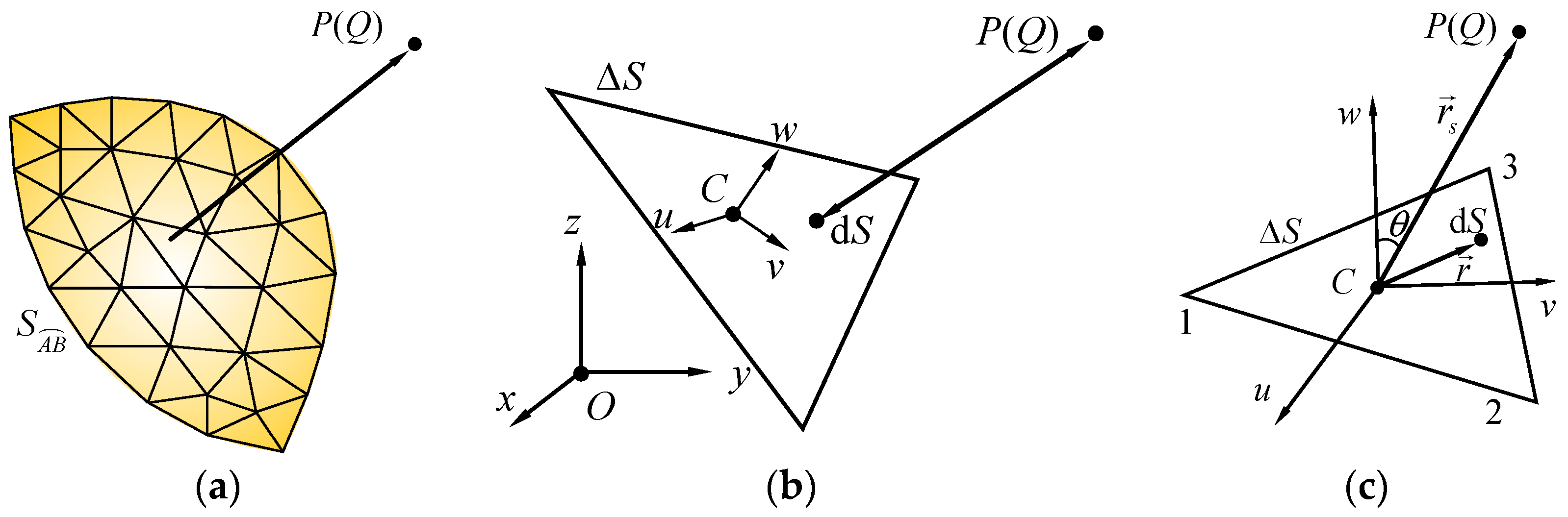
As shown in
Figure 2a, an arbitrarily shaped surface can be discretized by a series of elements, and in the following discussions, triangular elements are taken as an example to introduce the planar element method. Thus, the integral part
I can be equalized as the summation of integrals on every individual element:
where
where
is the vector from the reference center of each element, which is set at the barycenter of each element, to the observation (source) point. For each element, the integration can be considered in the local coordinate system individually, in which the element lies on the
u–C–v plane. In this local coordinate system,
,
, and the normal unit direction is
. Thus, the integration of each element can be reduced into
where
,
and
are slopes of Line: 1→2, Line: 2→3, and Line: 3→1, respectively, and
; (
xn,
yn) is the node coordinate of the element.
2.2.2. The Graphical Acoustic Computing Method
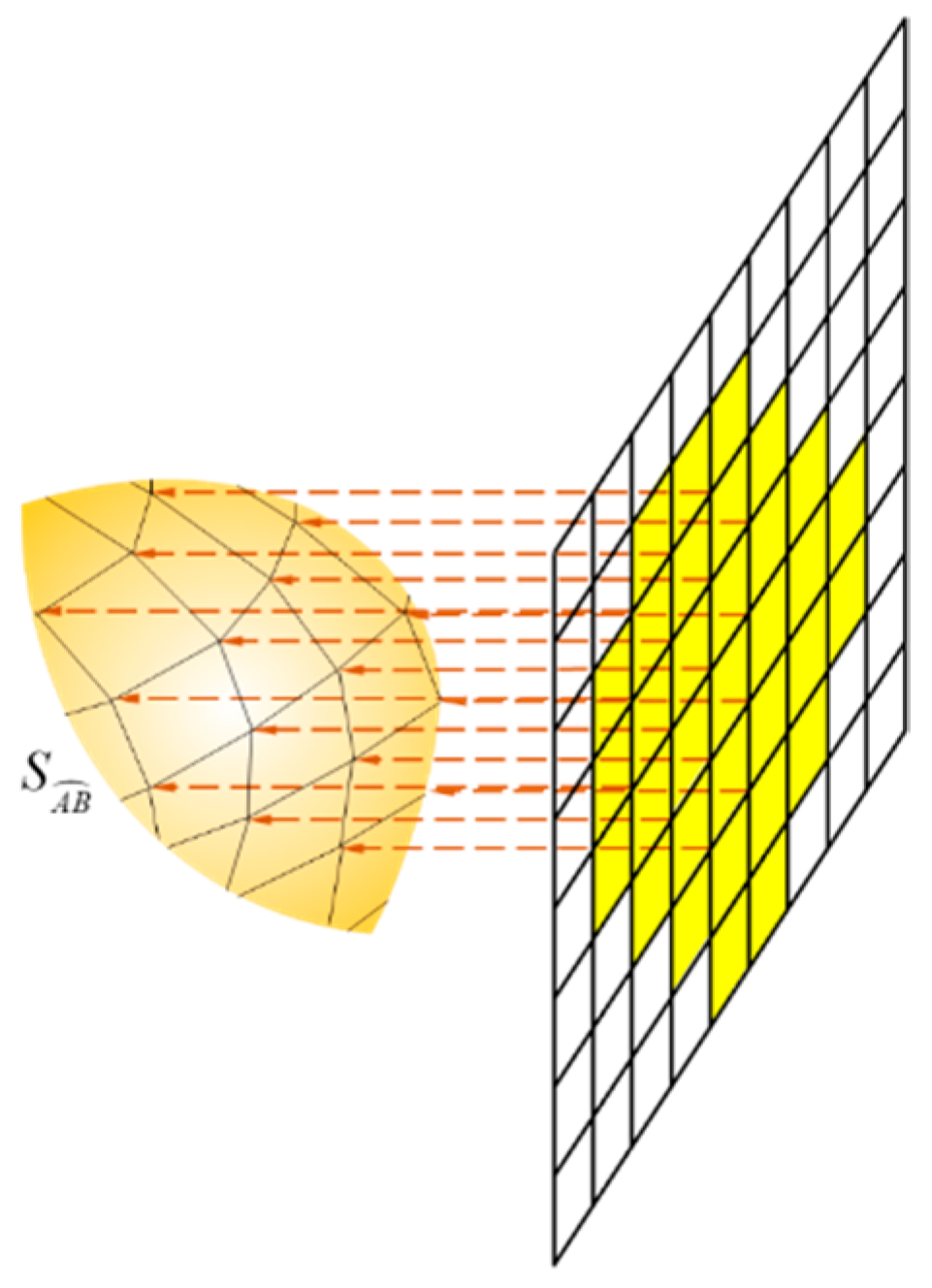
In the graphical rendering pipeline, the image of a 3D object can be projected onto a map with rectangle pixels containing the color information. Using the 3D graphical rendering technique, the target object can be discretized automatically as quadrilateral elements defined by each pixel as shown in
Figure 3, and the integrating processes of each element can be implemented in the GPU thread of each pixel parallelly. Thus, the time cost of solving the backscattering of a target surface is drastically reduced.
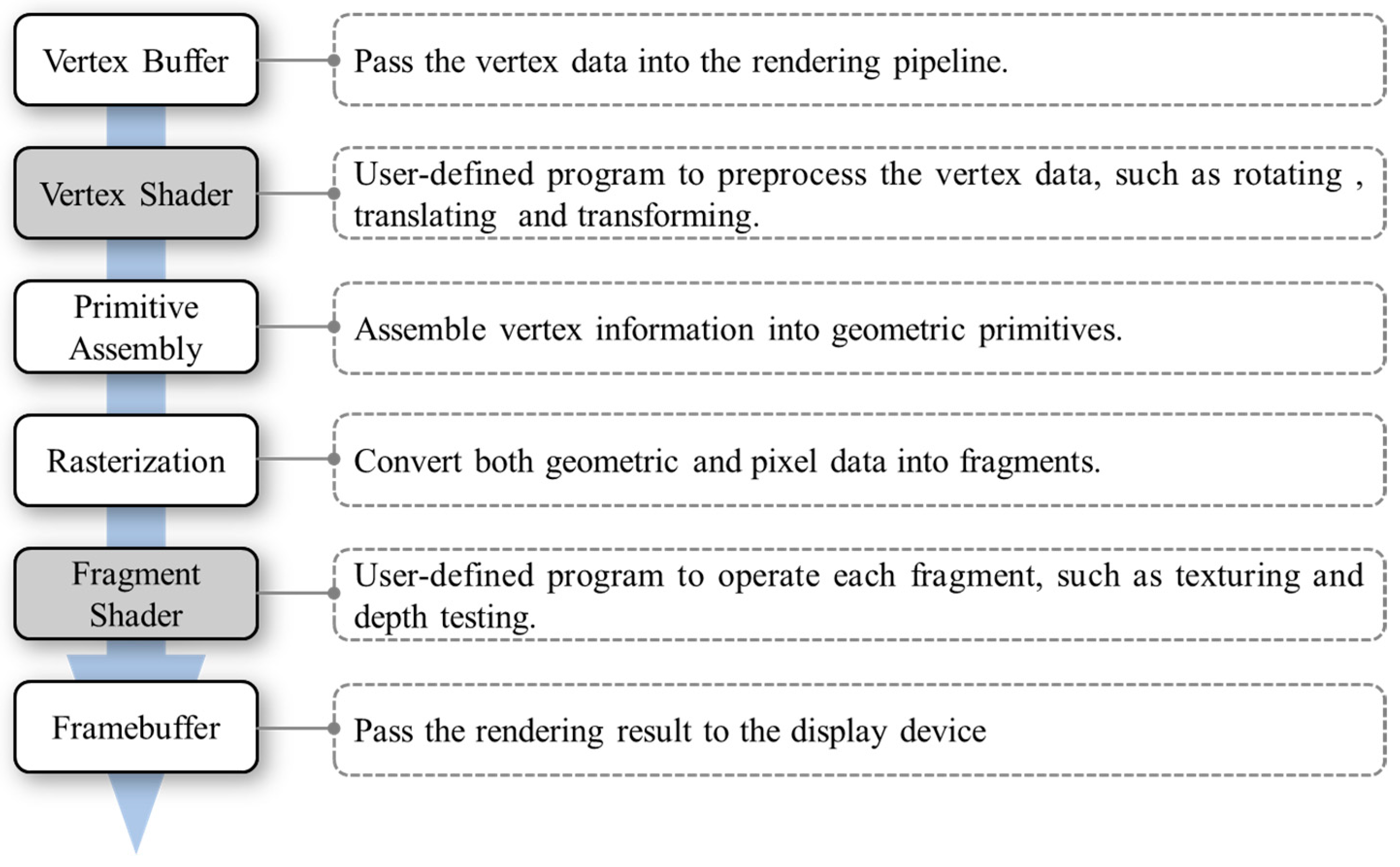
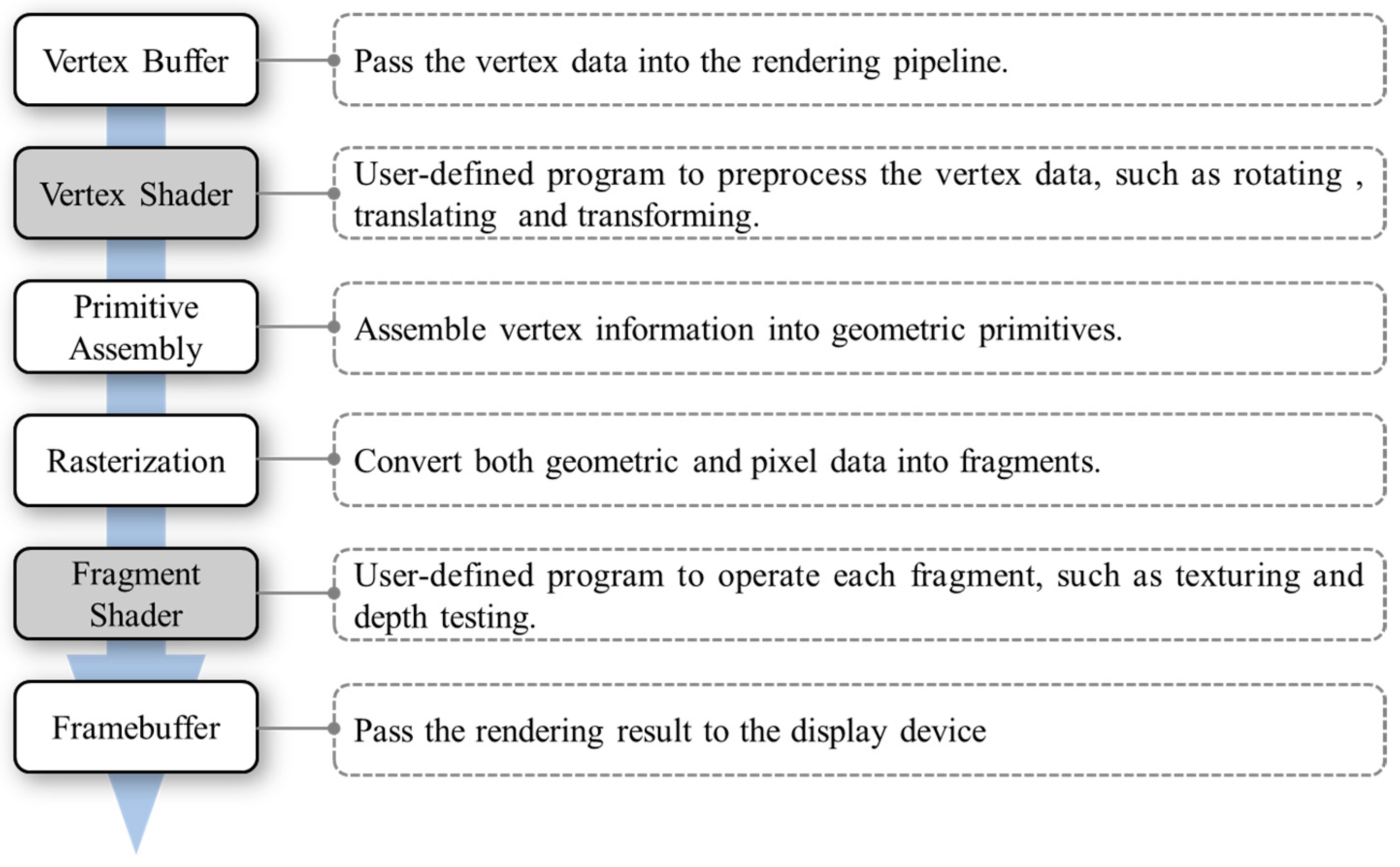
The graphical rendering pipeline of OpenGL roughly obeys the workflow in
Figure 4. In the GRACO application, as the vertex shader and fragment shader are user-defined programs, the general-purpose (not just used for the graphical rendering purpose) operations can be defined in these procedures. And in the rasterization step, the 3D geometry is scanned parallelly by rays shot from each pixel, and the surface meshes are automatically generated in this step.
According to Equation (12), it can be seen that the integral results between different elements are independent of each other. Therefore, the integral procedure of each element can be processed parallelly. As shown in
Figure 3, an object is insonified by an acoustic wave. And the incident acoustic wave can be approximated as a plane wave since it is emitted by a far-field source. In GRACO, the target object can be regarded as the object for rendering. The incident wave can be regarded as a group of rays perpendicular to the screen. The acoustic rays can be split into tubes by the grids defined by the screen pixels. The acoustic ray tubes cast onto the target surface generate a series of quadrilateral elements. Thus, the discretization scheme of GRACO is formed through this routine.
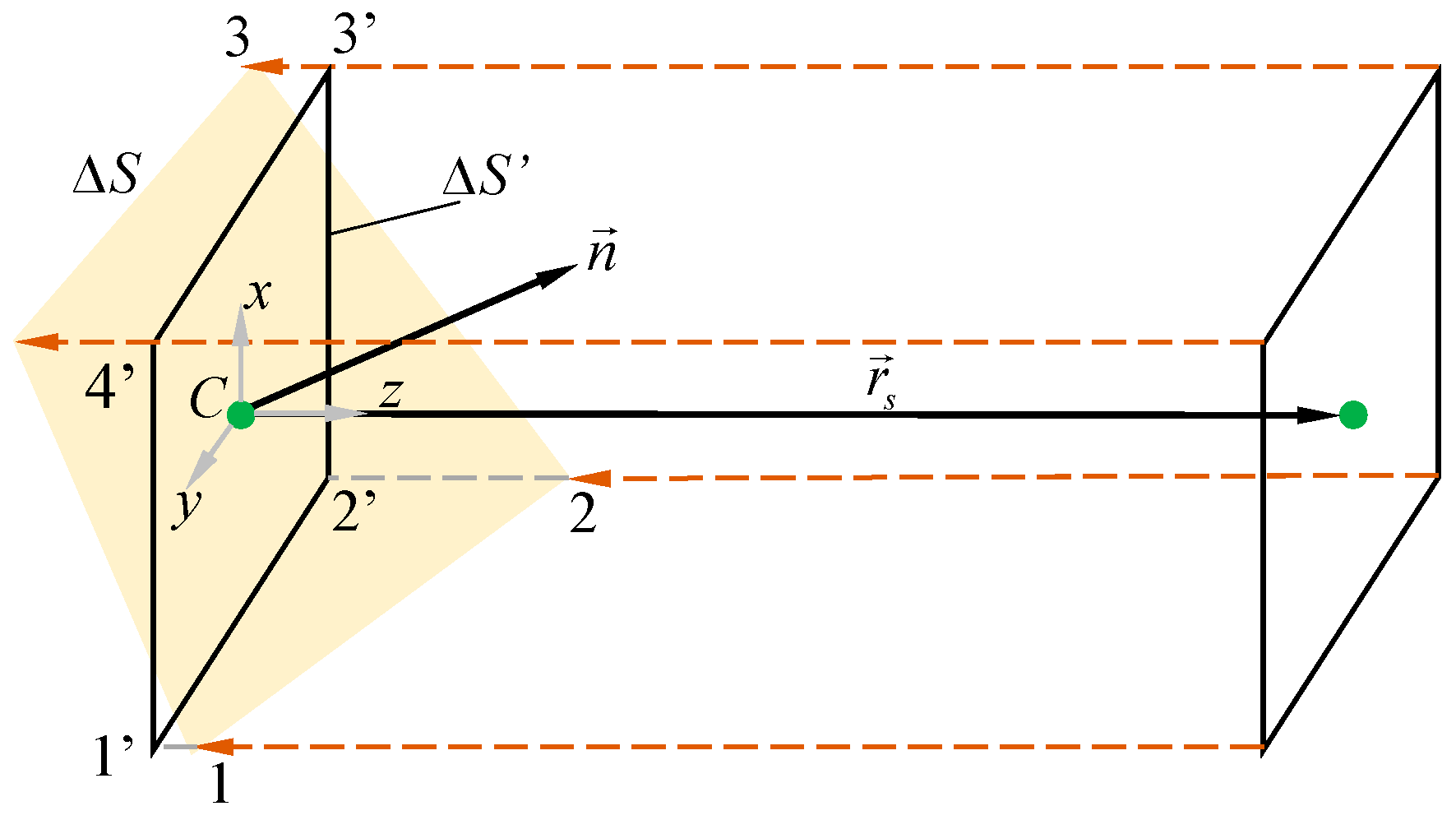
As shown in
Figure 5, a single element and corresponding ray tube are extracted from the discretized model to discuss the acoustic integration of a single element. Equation (12) is still applicable for quadrilateral elements. The integral area ∆
S can be projected onto the plane that is parallel to the screen plane and pass through the center point of ∆
S. And Equation (12) can be transformed as
where
. In the local coordinate system of
, the vector of normal direction is
and, thus, the expression of ∆
S plane can be expressed as
Therefore, the integration point on ∆
S can be expressed with
x and
y:As the unit vector of the scattering direction is perpendicular to the screen plane,
. The integration of a single element can be solved:
where
X and
Y represent the dimensions of the pixel.
Embedding Equation (17) in the per-fragment shader program, the integration procedure of each element can be completed in the kernel for each pixel’s rendering. Such a solution procedure, referred to as the graphical acoustic computing method in this paper, can be carried out parallelly by a GPU and, thus, this method considerably reduces the time cost of computation [
26].
2.3. The Hidden Surface Elimination Operation
In engineering practice, the target objects are usually complex. As only the illuminated regions are considered in physical optics, the shadowed surfaces should be removed when treating complex objects in the KA, and this procedure is termed the hidden surface elimination operation.
2.3.1. The Traditional Hidden Surface Elimination Technique
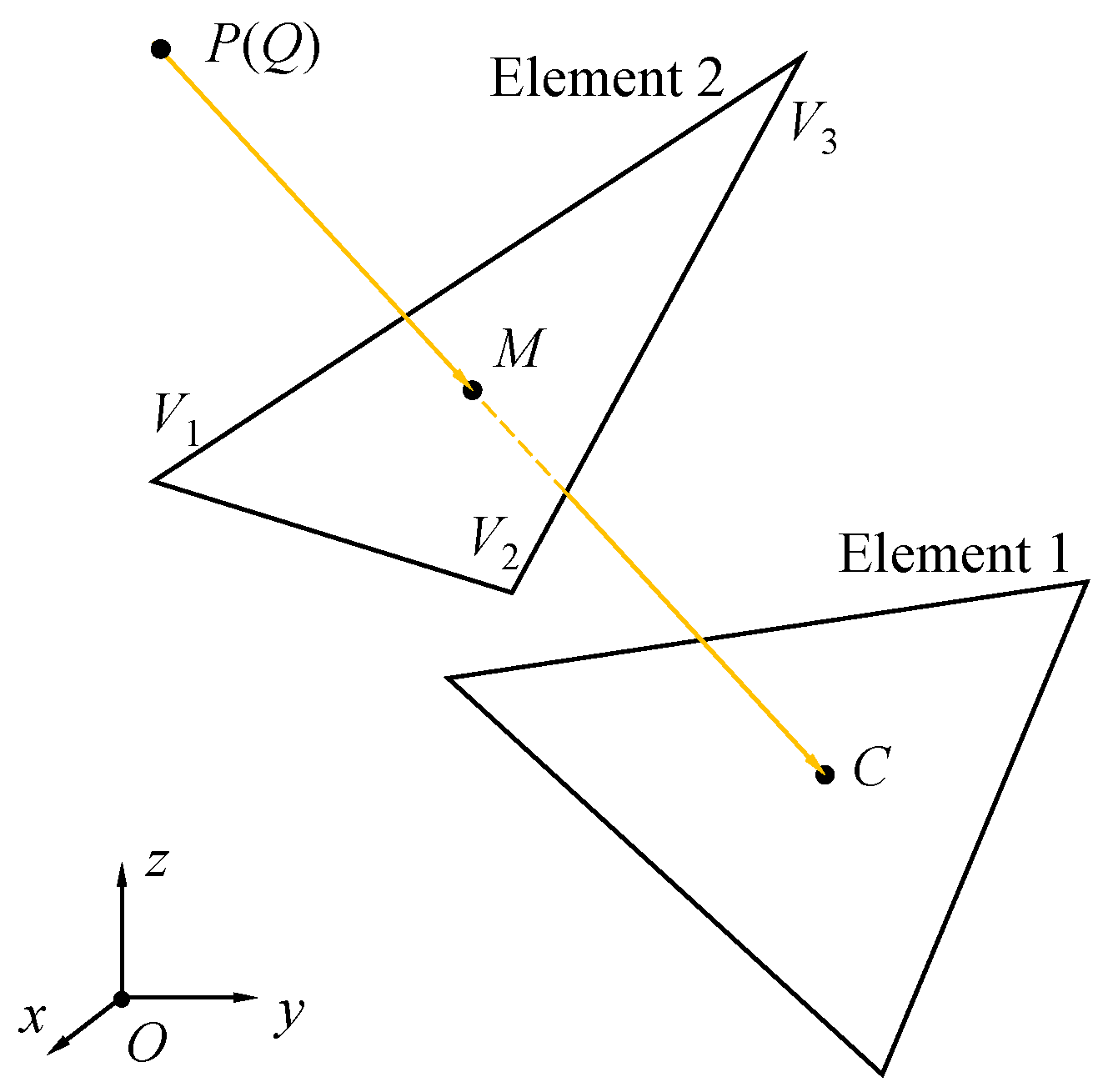
In the planar element method, there is a simple hidden surface elimination operation method performed by searching shadowed elements one by one. As shown in
Figure 6, the searching procedure of this hidden surface elimination operation is organized as follows:
(1) Calculate the coordinate of M;
(2) Evaluate whether Point
M is within Element 2 through Equation (18):
If Equation (18) is true,
M is within Element 2 and Element 1 is regarded as shielded by Element 2; otherwise,
M is out of or on the edge of Element 2 and Element 1 is not shadowed by Element 2;
(3) Repeat Step 2 until Element 2 is found to block the ray from P to C. If a shielding element for Element 1 is found, discard the integration contribution of Element 1.
This method searches shadowed elements (one by one) and each element pair through the other elements to evaluate the illumination situation of the concerned element. Thus, there are N × N instances of shadowing test time consumptions where N is the number of elements. The time cost for this method upsurges drastically with an increase in the number of elements.
2.3.2. The Z-Buffer Rendering Technique
In graphical rendering, the hidden surface elimination algorithm is carried out in the rasterization step via the Z-buffer technique [
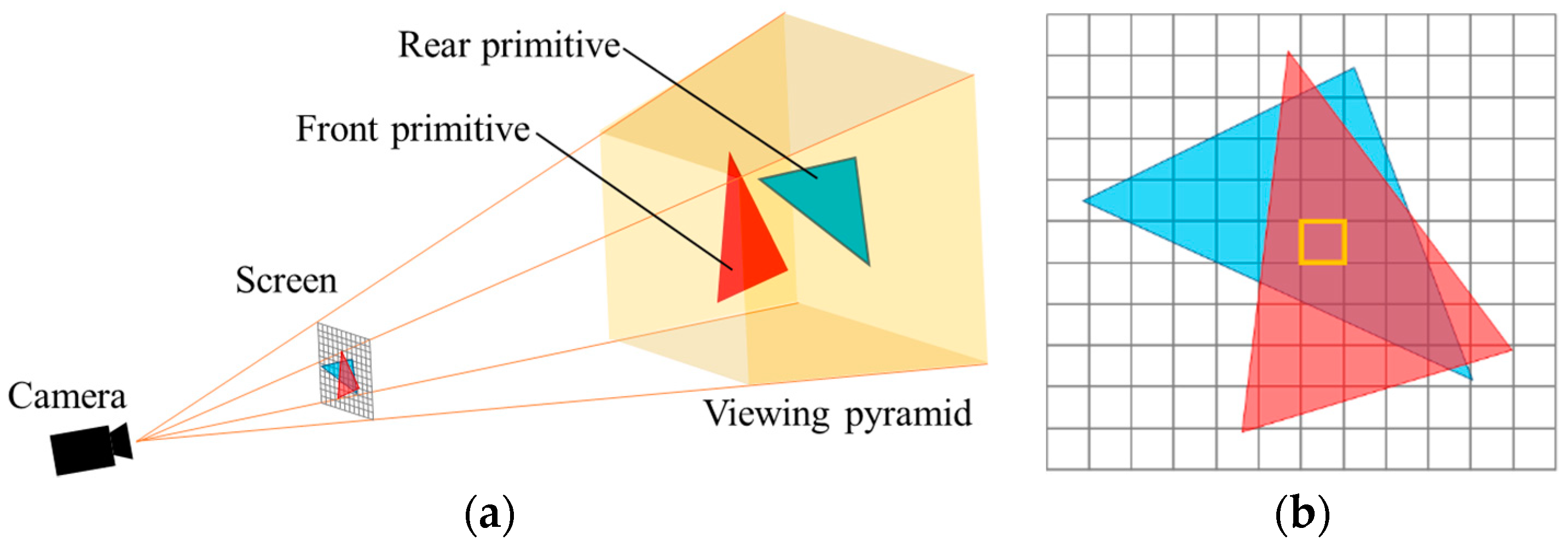
38]. As shown in
Figure 7a, two primitives are located in the viewing pyramid. When observing these two primitives from the position of the camera, parts of the rear primitive (blue) are shadowed by the front one (red). In OpenGL, the Z-buffer technique is applied to calculate the shadowing relationship. In the vertex shader step, the vertex coordinates of the primitives in the viewing pyramid are projected onto the screen using the MVP matrix (model, view, and projection matrix) as shown in
Figure 7b. And the vertex coordinates as well as some accessory information, such as the depth, normal direction, color and texture coordinates, etc., are wrapped in the vertex data structure. In the rasterization step, each primitive is divided by the pixels as fragments. The coordinates and accessory information of each fragment are interpolated according to vertex information. For the pixels covered by more than one fragment, the depth information (the distance from the fragment to the camera) of these fragments is compared, and the nearest fragment is chosen to render the current pixel.
During the OpenGL rendering procedures, the projection, scanning, interpolation, and comparison of operations are implemented parallelly in the GPU kernels. Thus, the time cost of hidden surface elimination operations is drastically cut by the parallel program, compared to the traditional hidden surface elimination technique.
2.4. The Depth Peeling and Scattering of Multiple-Layered Structures for GRACO
In the previous sections, only the acoustic backscattering of the outermost surface is considered. That is, the backscattering wave is composed of reflecting waves from the outmost surface but no acoustic wave penetrates through the outer surface and strikes the inner structure. When considering the acoustic backscattering contribution of the inner structure, there are two extra aspects needed to be considered: (1) the transmission coefficient penetrating the outer surfaces should be defined; (2) how to identify shadowing element pairs.
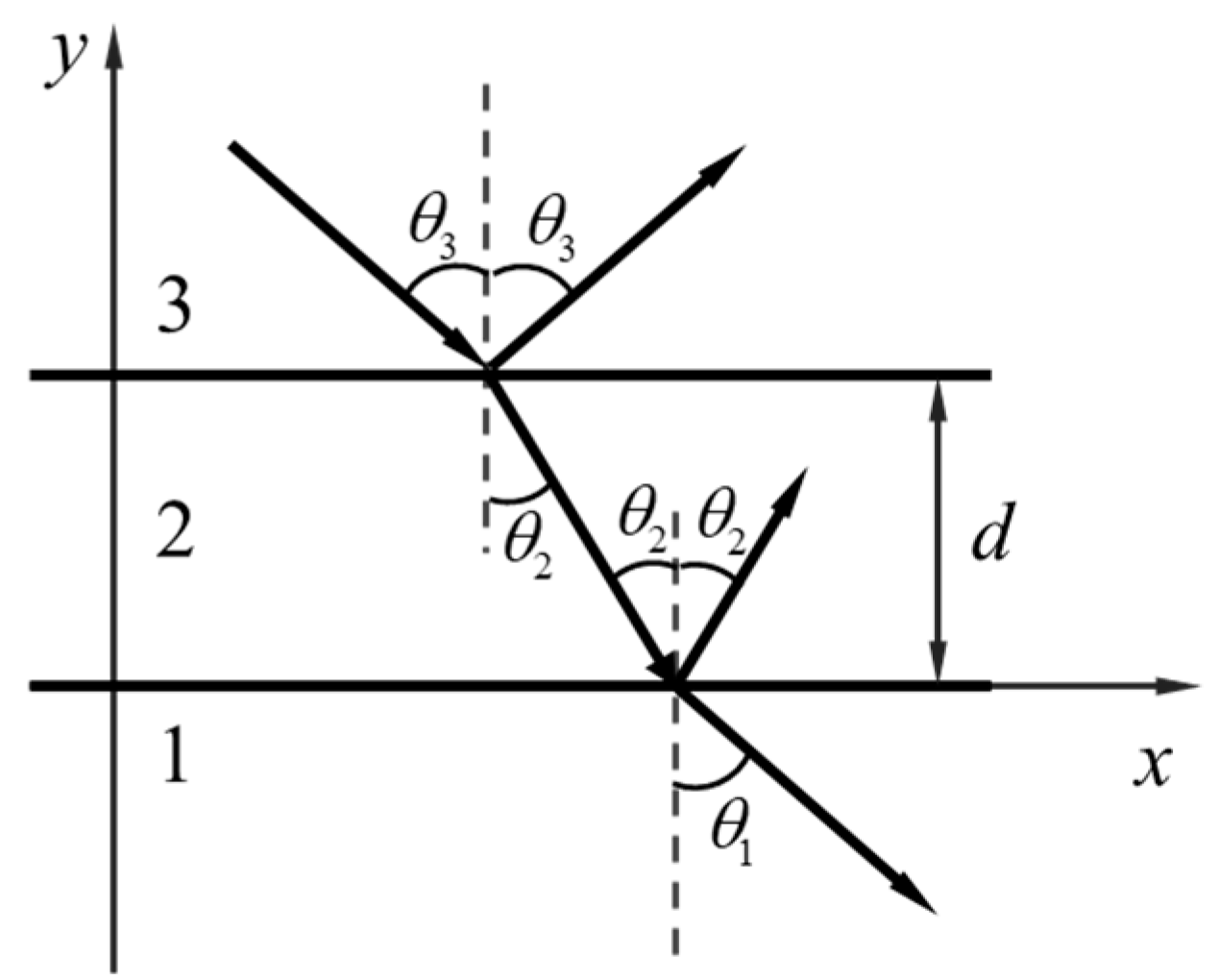
Due to the properties of the target elements being regarded as those of an infinite tangent plane in the Kirchhoff approximation, the reflection and transmission coefficients can be approximated with those of an infinite plane. According to waves in layered media [
39], the reflection and transmission coefficients of an infinite plane as shown in
Figure 8 are
and
where
k2z is the
z-directional component of the second-layer wave vector,
d is the thickness of the second layer, and
Zi is the acoustic impedance of the
ith layer medium.
where
ρi and
ci are the density and acoustic velocity of
ith layer, respectively.
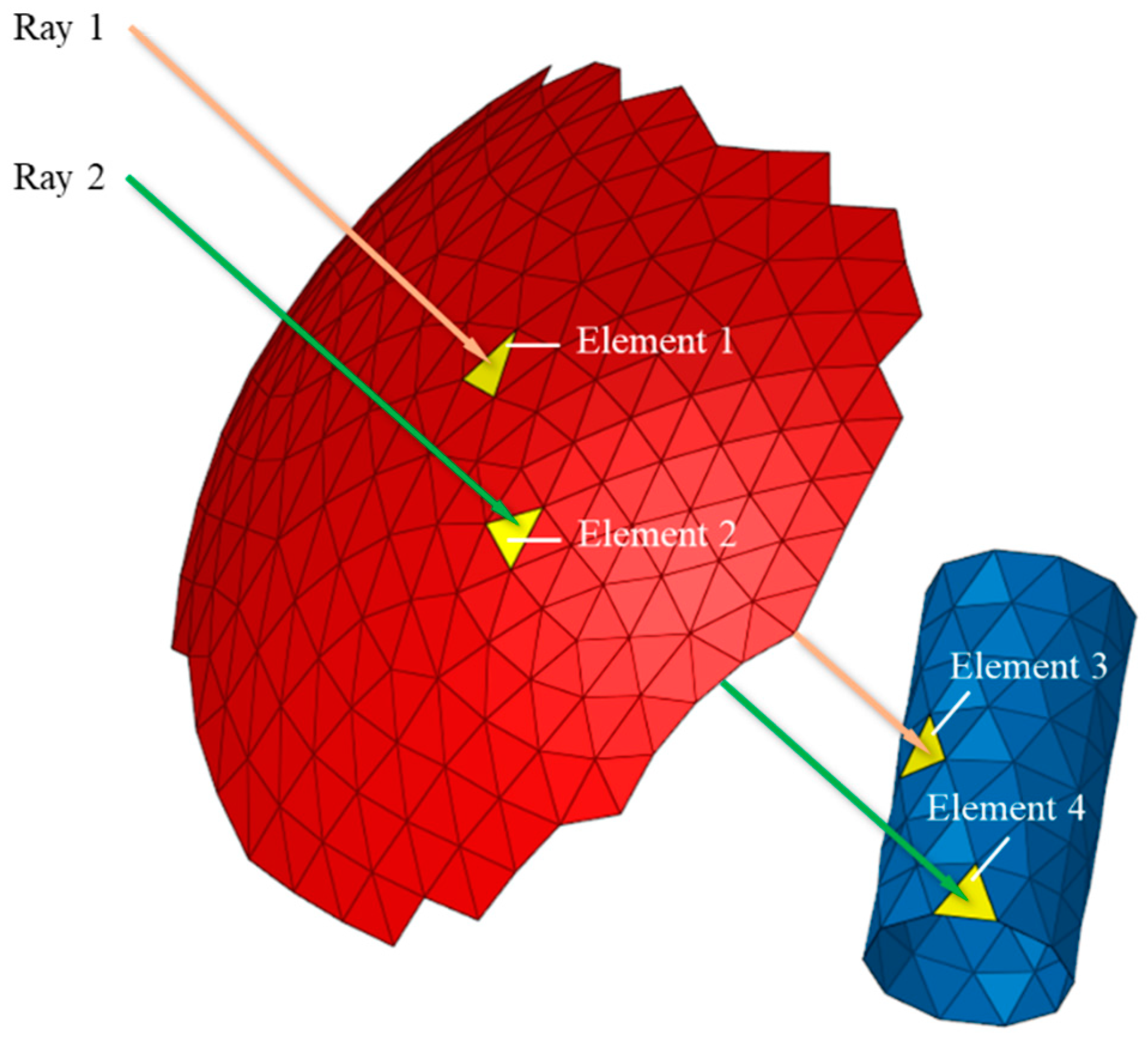
As shown in
Figure 9, the acoustic rays insonify a complex target with an outer surface (red) and an inner structure (blue). If the outer surface is acoustic-penetrable, the existence of the inner structure makes contributions to the total backscattering. Due to the incident angle being different, the transmission coefficients of Element 1 and 2 shot by parallel rays are different. Thus, the weight coefficients for the contributions of each inner element (Elements 3 and 4) are not always the same. The weight coefficients for inner elements are determined by the outer-layer elements that shield each inner element from incident acoustic rays. That is, the weight coefficient of Element 3 is determined by the transmission coefficient of Element 1 and Element 4 is determined by Element 2. Therefore, an algorithm for identifying the shadowing element pairs between the outer surface and the inner structure is needed to designate proper weight coefficients for inner elements.
In the traditional discretized KA, the technique of finding shadowing pairs is the same as that in the traditional hidden surface elimination technique. Similarly, the shadow test operations are carried out element by element for each considered element, and this method is quite inefficient.
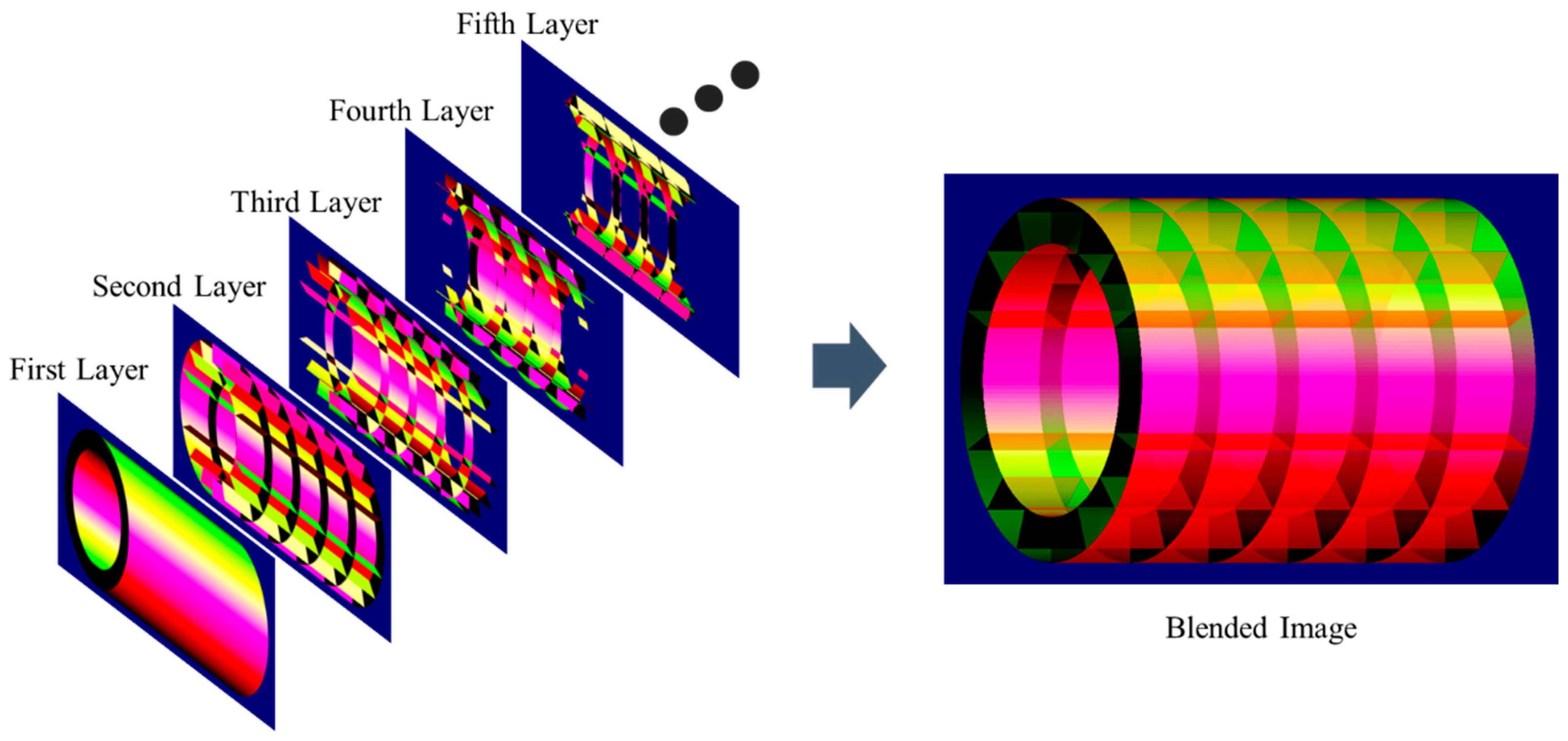
In 3D graphical rendering, the depth peeling (DP) method which is commonly applied to render semi-transparent materials can be utilized to consider the penetration of the acoustic rays. In the previous section, the Z-buffer technique is introduced to select the fragments nearest to the camera at each pixel. In the depth peeling method, the target object is rendered multiple times, and the rendering results are stored in different layers of framebuffers. For the first layer, the fragments nearest to the camera at each pixel are rasterized and stored in the first-layer framebuffer. For the second layer, at each pixel, the fragments whose Z-depth values are smaller than that in the first-layer framebuffer at the current pixel are discarded, and the fragments which are second nearest to the camera are rendered and stored in the second-layer framebuffer. For higher-order layers, the depth values of the previous layer are taken as the threshold to filter out the fragments that have been rendered in the previous layers. After rendering the images of different layers, the framebuffers in different layers are blended with weighted coefficients, and the image of the semi-transparent object is acquired.
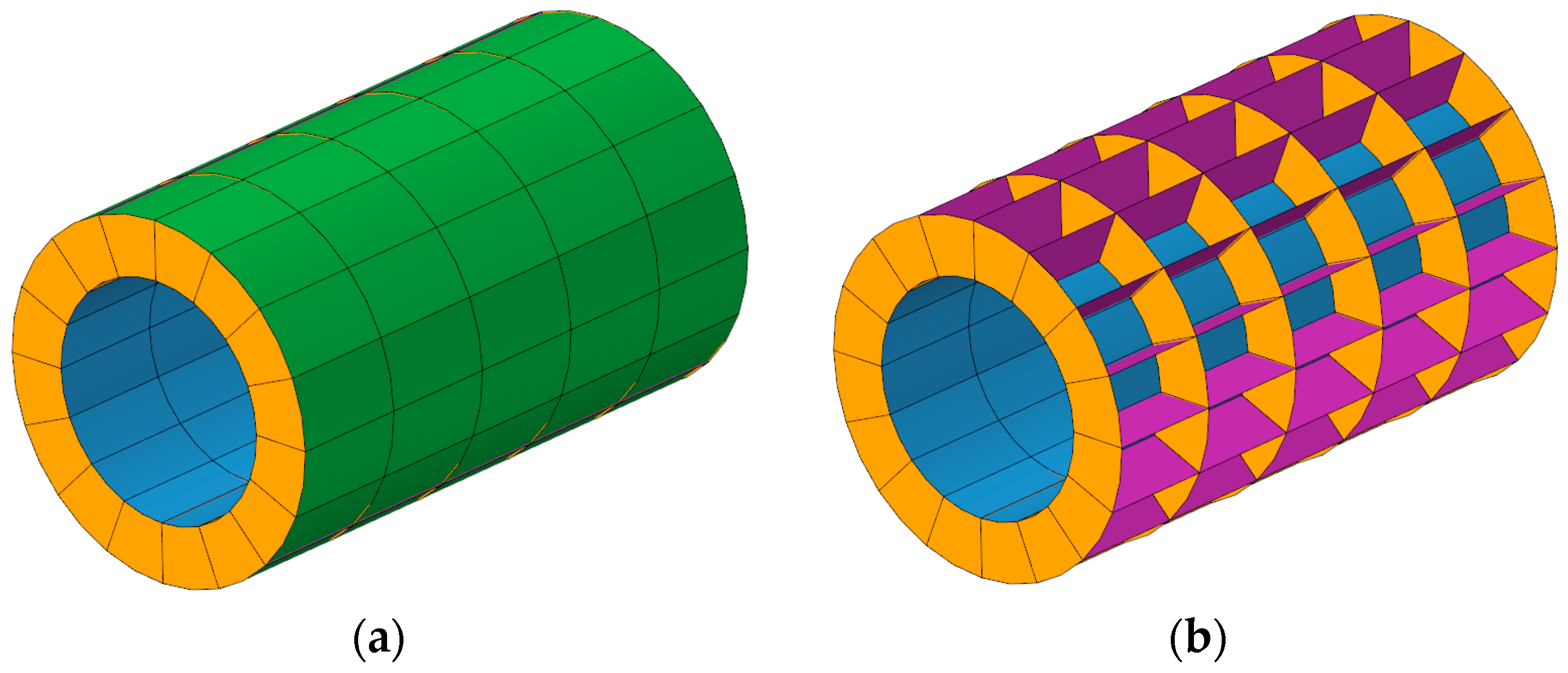
An example double shell with grids is presented in
Figure 10. As shown in
Figure 11, the depth peeling method is used to render this semi-transparent double shell. In this depth peeling rendering pipeline, the color of each pixel is defined as the normal direction of each rendered element. The fragments that are first nearest, second nearest, third nearest, etc., are projected onto the pixels of first-layer, second-layer, third-layer, etc., framebuffers. After the rendering of different layers, the target semi-transparent image is acquired by blending the image of different layers together.
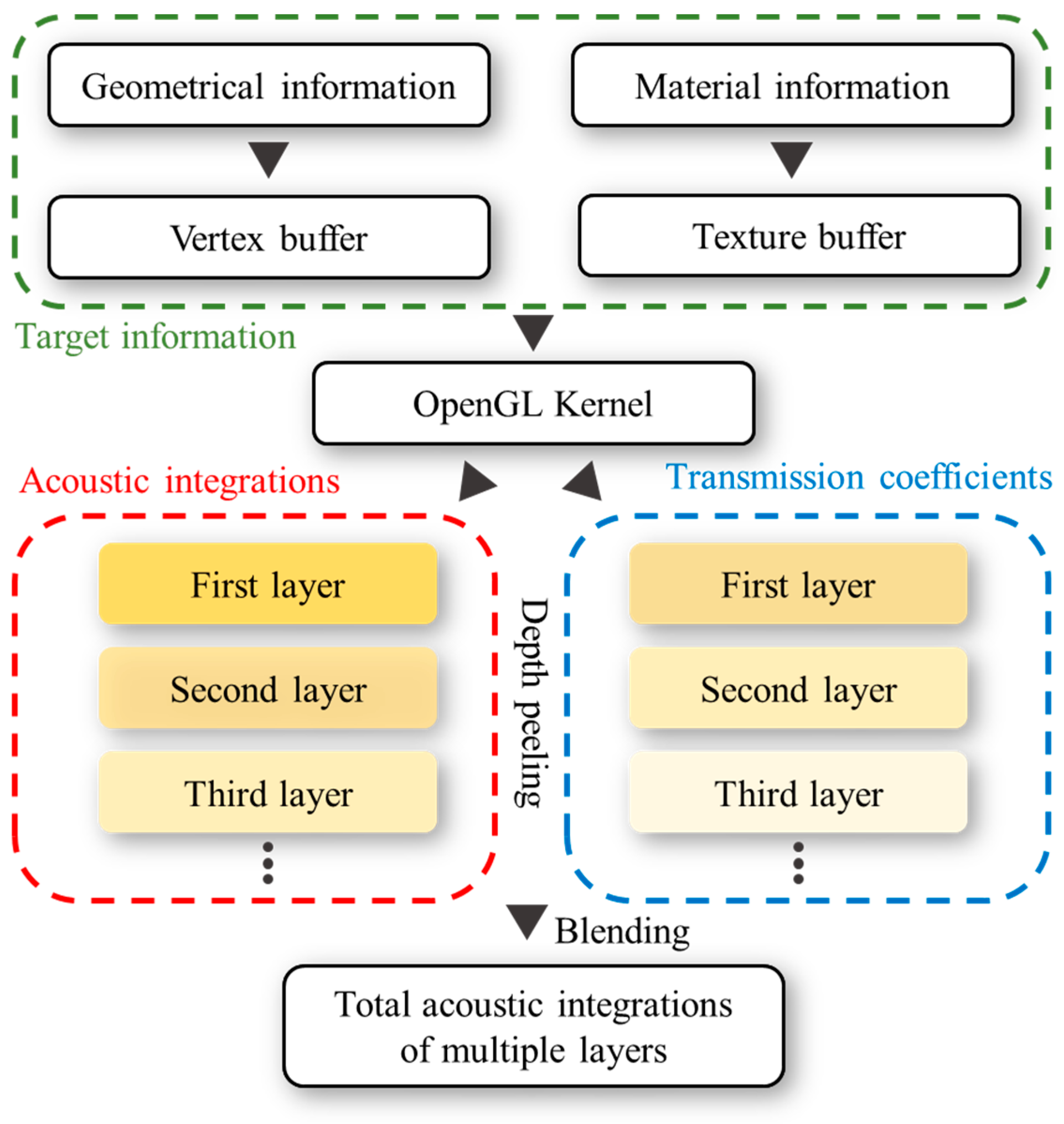
In GRACO, the depth peeling technique can be applied to cope with the penetration of acoustic rays. As shown by the procedures in
Figure 12, both the backscattering integrations and transmission coefficients of the nearest
nth layer are rendered through the depth peeling technique, and then, the total backscattering contributions of the outer surface as well as the internal structure can be acquired through summing up the integration results of different layers weighted with the previous layer’s transmission coefficient:
where
is the acoustic integration of the
ith-layer element, and
is the transmission coefficient of the
jth-layer element.
4. Conclusions
In this work, a KA-based GRACO method is introduced to deal with high-frequency acoustic backscattering problems of large-scale objects. Also, the depth peeling technique which is commonly used to deal with the 3D graphical rendering of transparent objects is integrated into the GRACO method to consider the backscattering contributions of inner structures. Some numerical examples are carried out with the following conclusions:
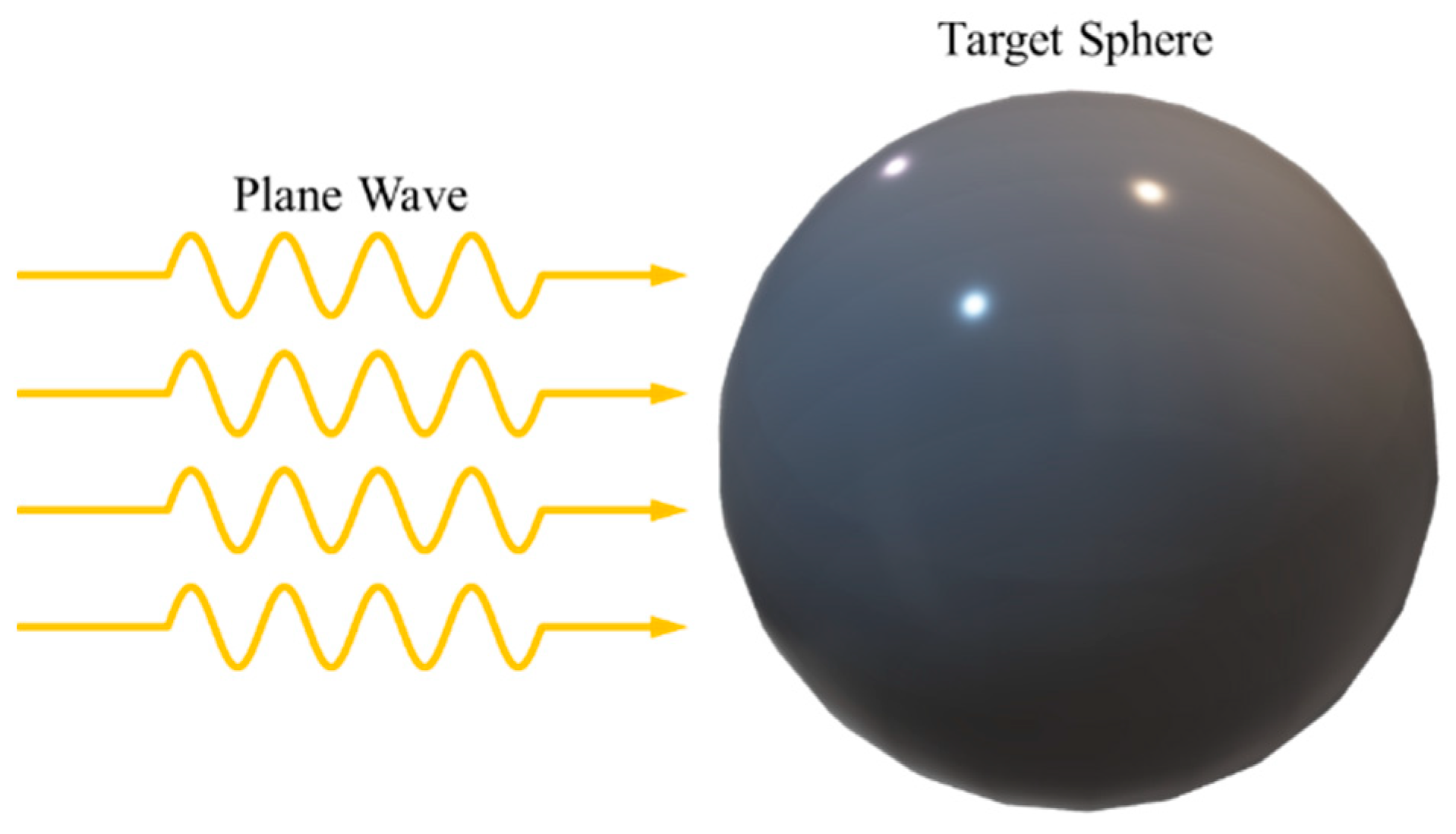
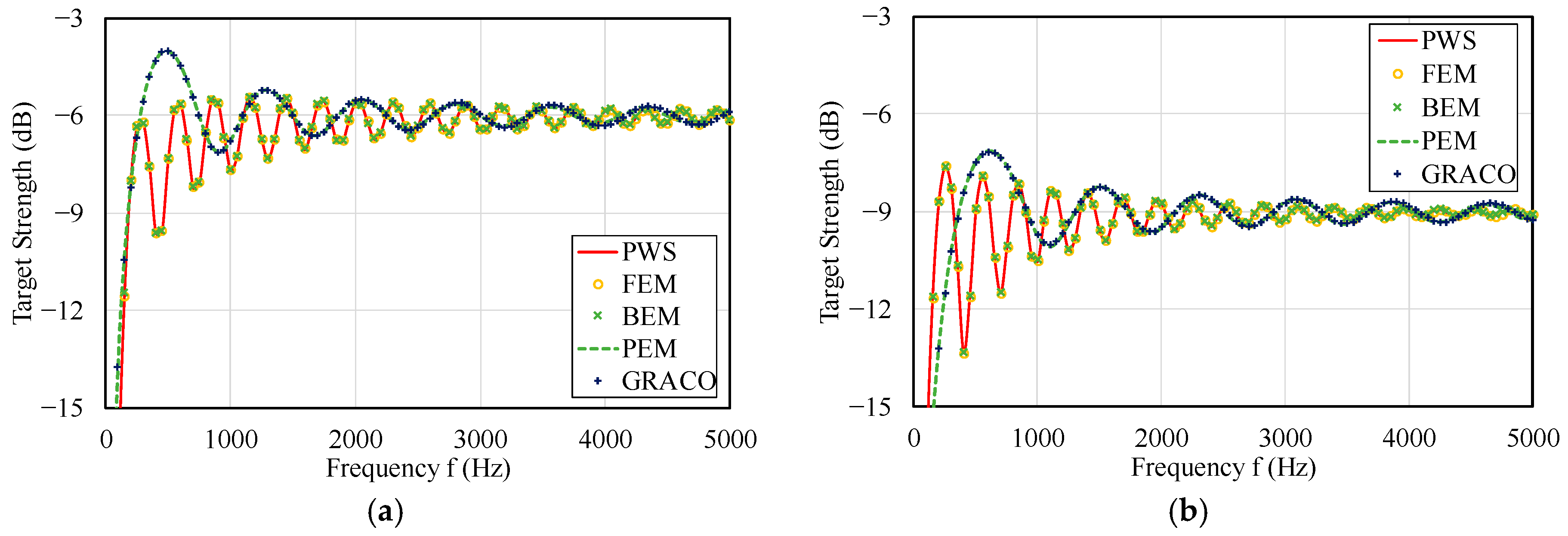
Firstly, the target strength of an impedance sphere and a large-scale benchmark model has been evaluated with different methods. Through the solutions of the sphere example, it can be determined that the GRACO method can acquire sufficient accurate TS solutions for high-frequency backscattering problems with much less computational consumption and time costs. The numerical example of the benchmark model tells one that GRACO performs well in terms of accuracy when predicting the target strength of complex object and that GRACO still keeps high efficiency when coping with the high-frequency backscattering of large-scale models while traditional numerical methods like FEM and BEM have difficulties concerning efficiency and computational costs.
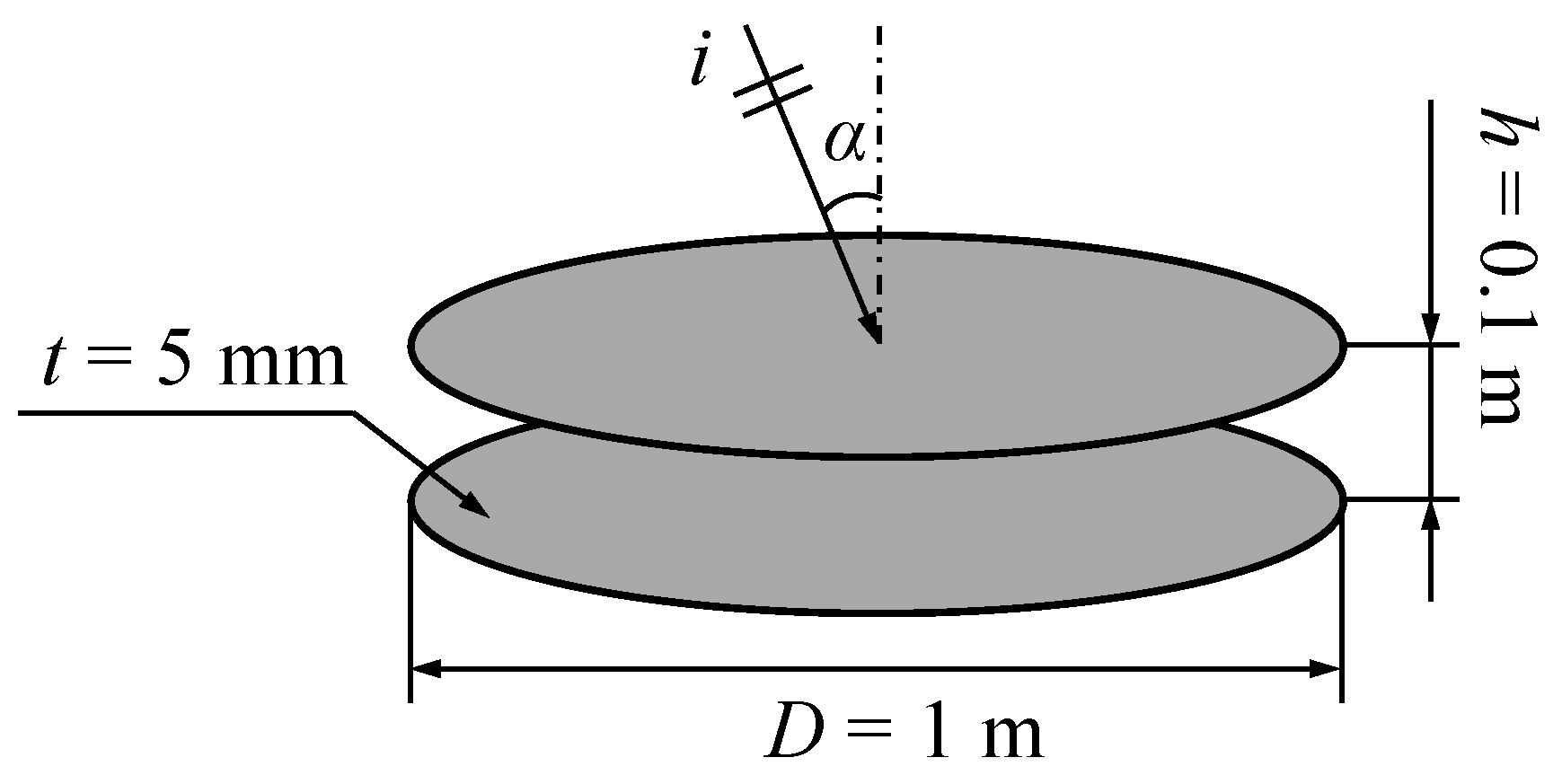
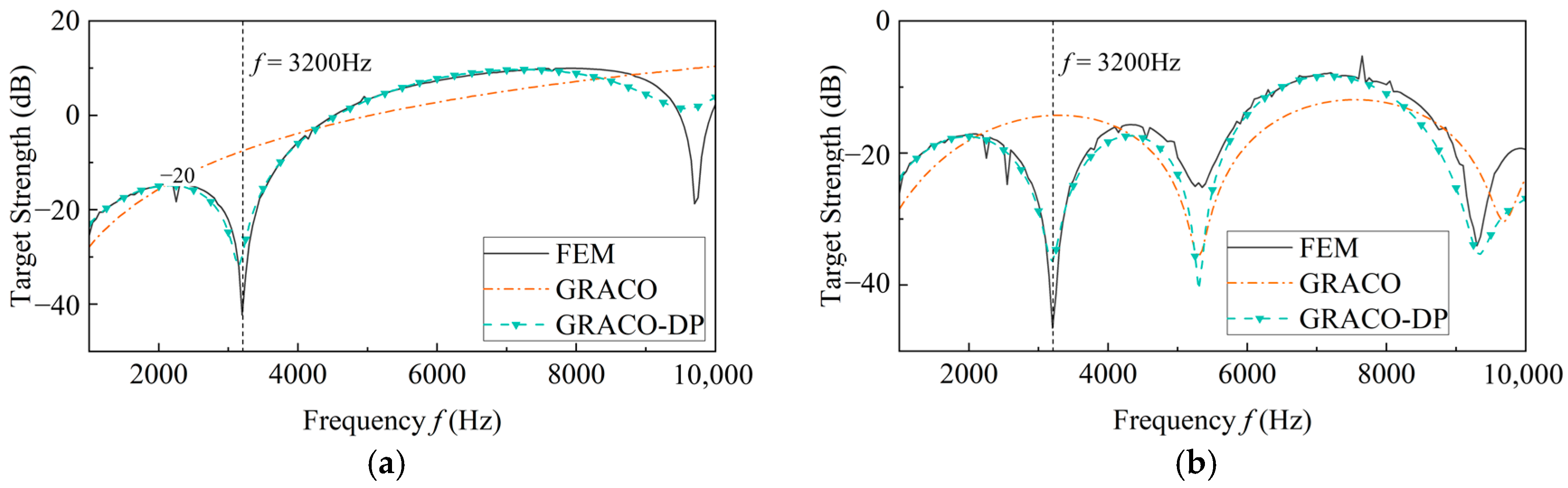
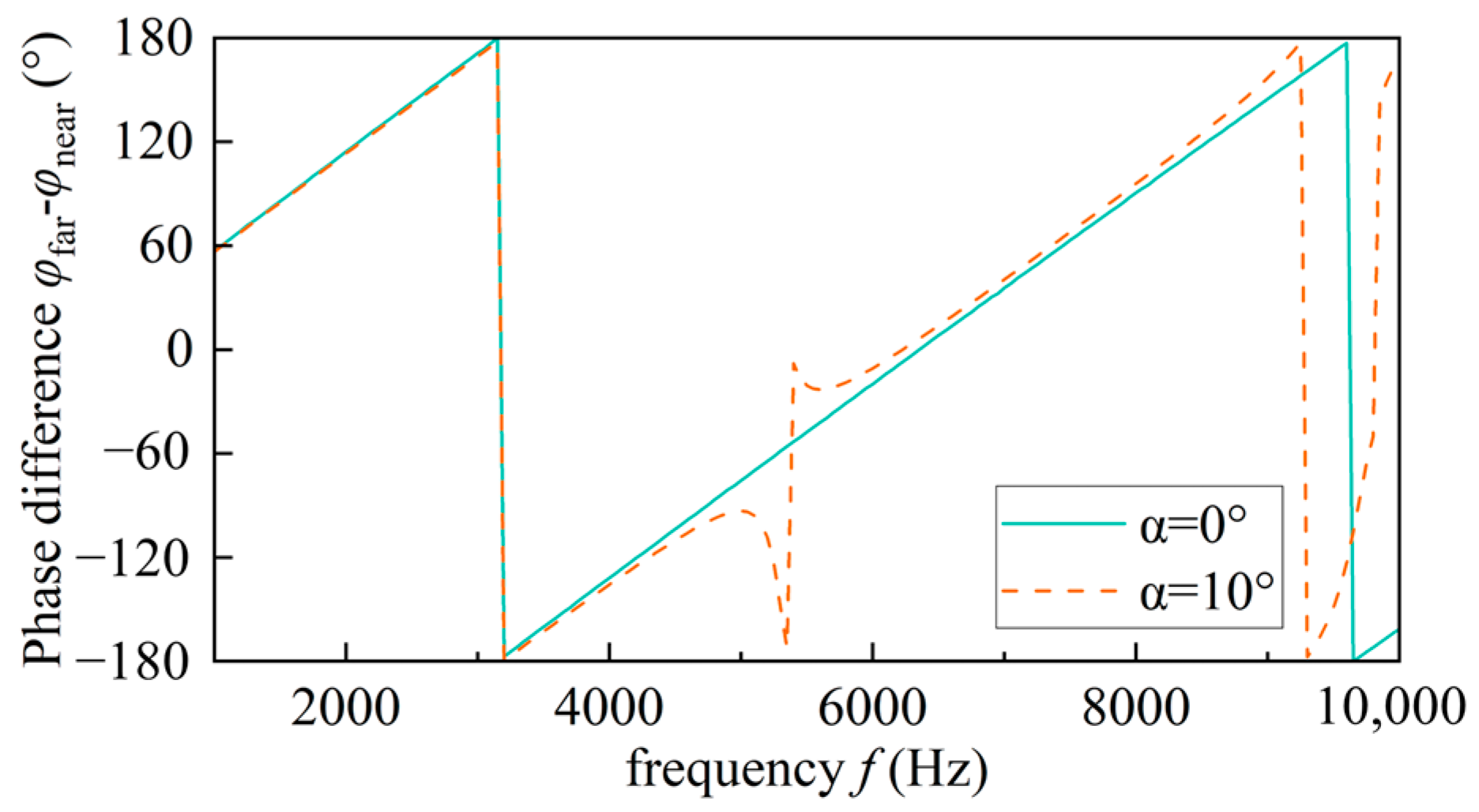
Secondly, a pair of circular plates is taken as an example to discuss the backscattering of multiple-layer structures. Compared to the traditional GRACO method, the GRACO–DP method can properly obtain the backscattering contributions that are shadowed by outer surfaces. Therefore, the solution of GRACO–DP is better fitted to the FEM solution which is regarded as the reference solution of this example.
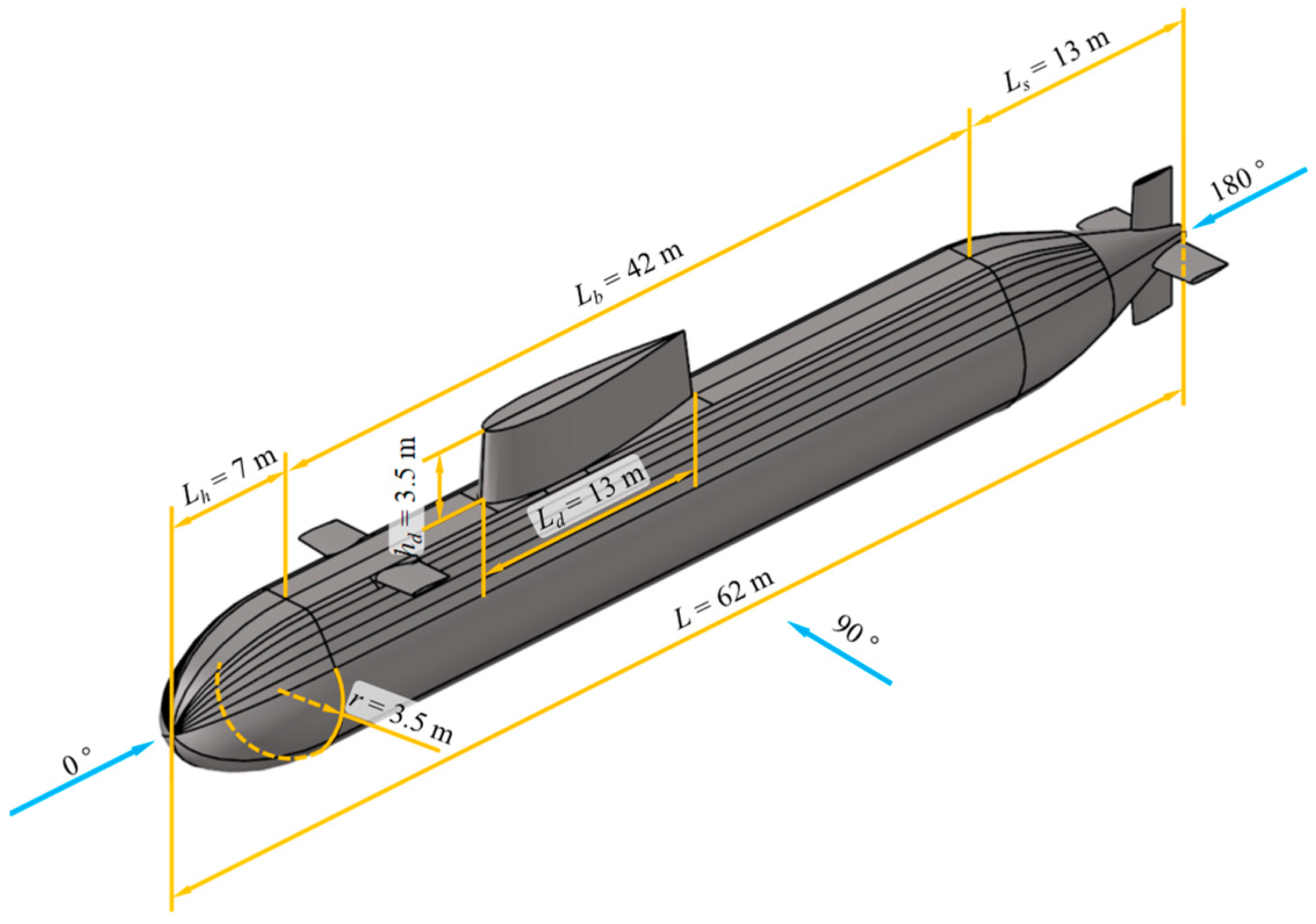
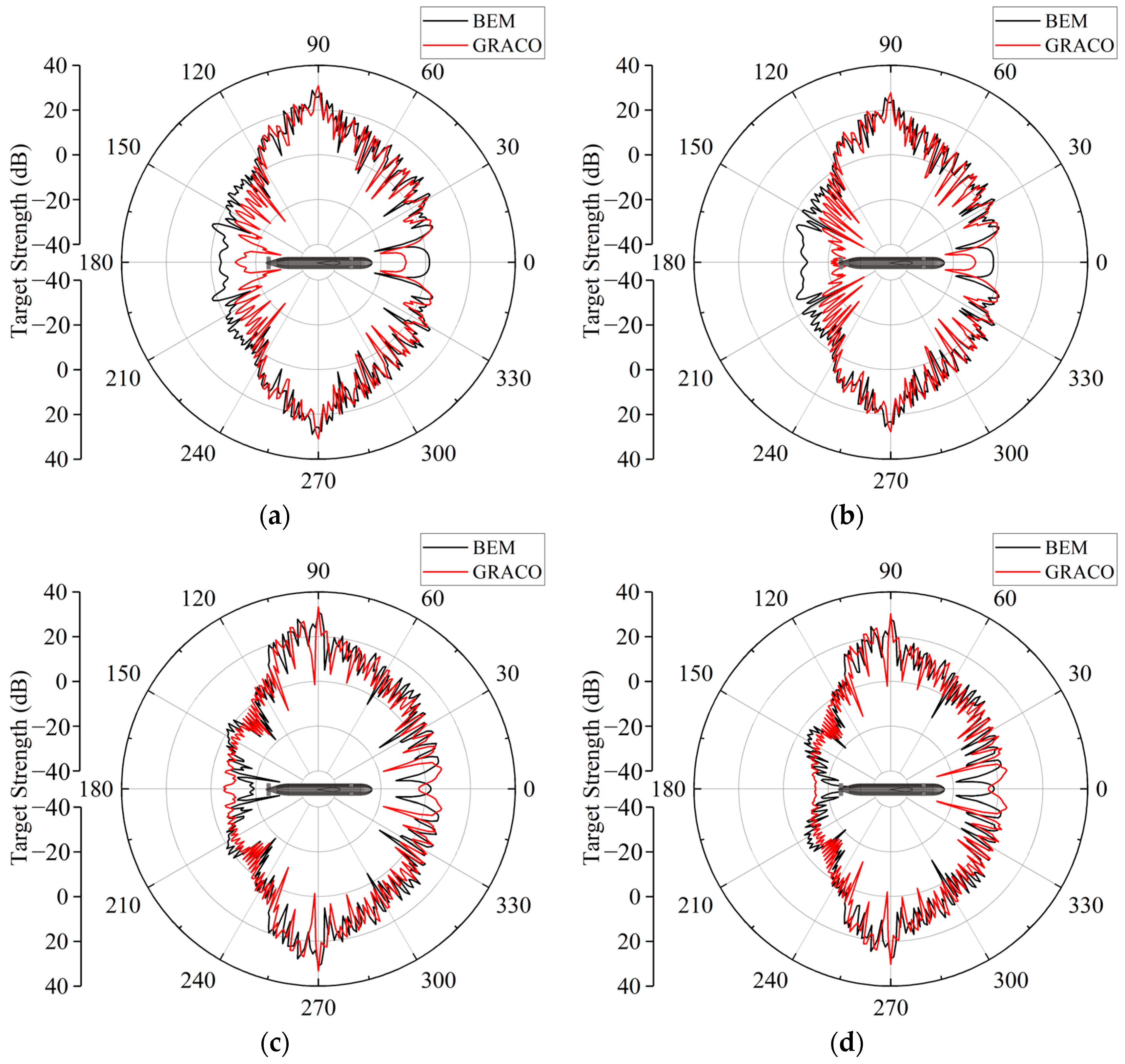
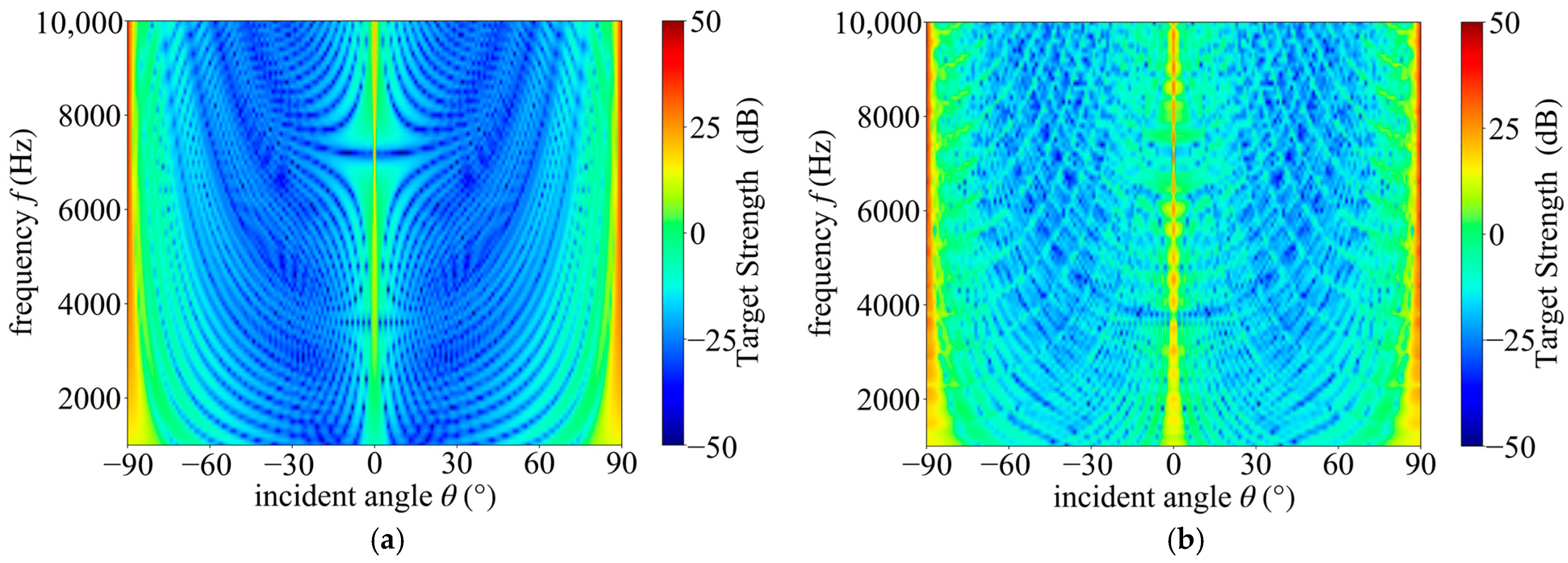
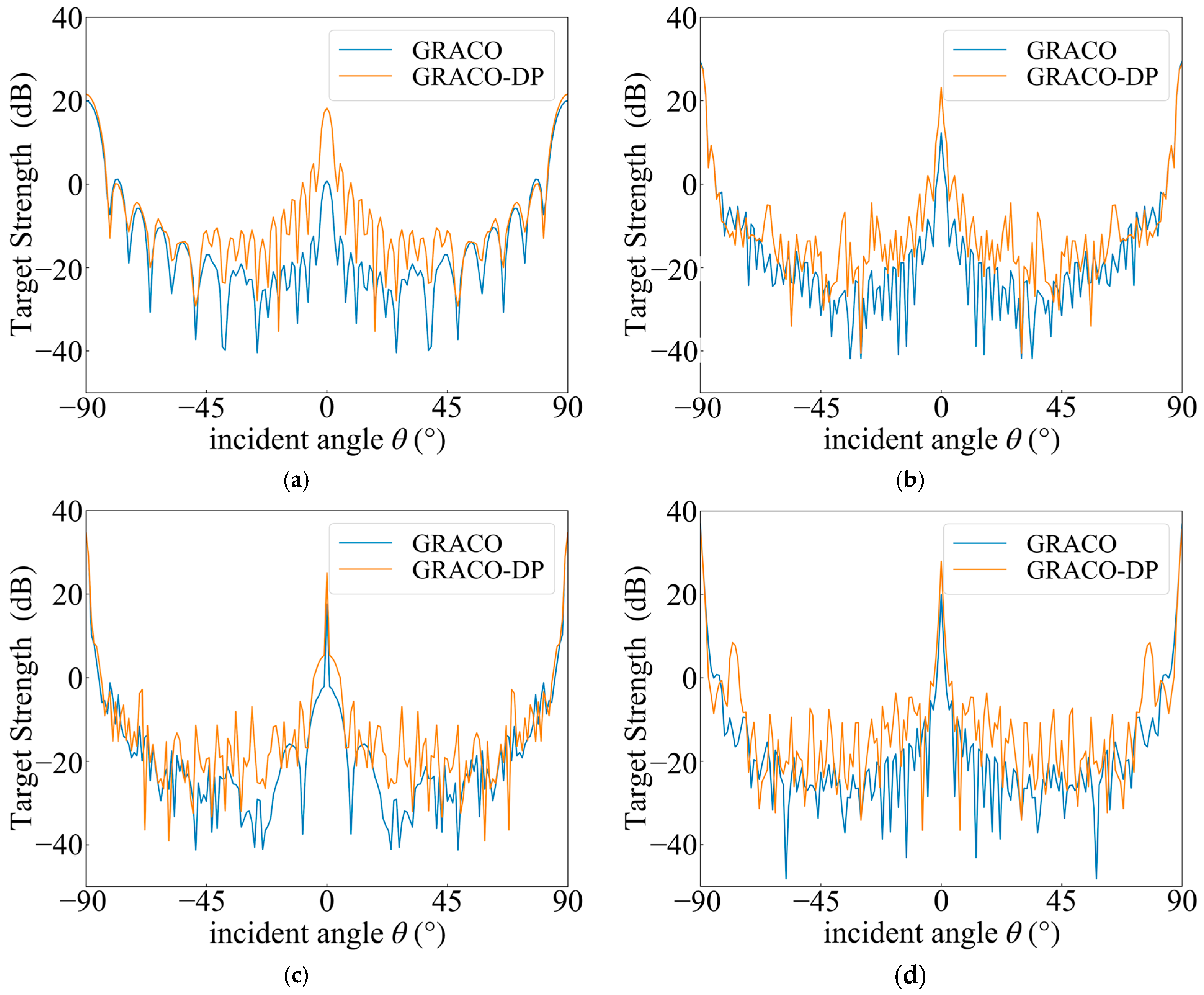
Finally, a ribbed double shell model is considered by both the GRACO and GRACO–DP. The results show that there exist considerable differences between the solutions from different methods for most incident angles. Moreover, features of Bragg waves which are generated by the periodically arranged ribs can be spotted from the GRACO–DP solution, while such features cannot be observed from the solution of GRACO. Thus, in engineering practice, the combination of DP and GRACO is necessary for determining the backscattering of multiple-layered structures.
The current work shines light on the backscattering correction of a KA-based method considering the acoustic penetration of multiple-layered structures, but some limitations and problems remain unresolved and need to be studied in future works. For example, the multiple back-and-forth reflections between the outer surfaces and the inner shells should be considered more carefully. Furthermore, the influence of the curvature of the surfaces on the transmission coefficients is not discussed in detail.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}