
Coordinated Trajectory Planning for Multiple Autonomous Underwater Vehicles: A Parallel Grey Wolf Optimizer



Abstract
:1. Introduction
1.1. Background
1.2. Related Work
- To the best of our knowledge, AUV path planning for underwater coordinated path planning missions has been rarely studied by the existing literature whereas its main difference from the traditional AUV path-planning problem is the implementation of threats, space, and time constraints;
- Traditional GWO exhibits a low convergence speed and lacks a sufficient global searching ability. Hence, there is a need to devise a more effective method to address the path planning problem. The primary emphasis should be on significantly enhancing the global search capability by seamlessly integrating a practical operator.
1.3. Contributions
- By encapsulating the potential threats, arrival time windows, space constraints, and physical bounds for each AUV, a novel coordinated path planning model is proposed, providing a systematic framework for the coordinated mission;
- Incorporating the restricted initialization and multi-objective clustering strategy, we introduce the Parallel Grey Wolf Optimizer (P-GWO) to consistently address the coordinated path planning. The P-GWO technique boasts a remarkable global searching ability while ensuring rapid convergence. By leveraging this approach, the underlying optimization problem is thoroughly explored, leading to the swift generation of an optimal waypoint sequence;
- Extensive simulation evaluations under two distinct scenarios have led to the achievement of enhanced practicability.
2. Problem Model
2.1. Environment Model
2.2. AUV Kinematic Constraints
2.3. Space and Time Constraint Model
2.4. Optimization Terms
2.5. Problem Statement
3. Solver Design
3.1. Brief States on Grey Wolf Optimizer
3.2. Parallel Grey Wolf Optimizer Design
- (1)
- Restricted initialization
- (2)
- Decay factor design
- (3)
- Multi-objective population clustering strategy
- Step 1: Input the original population set and the number of objectives .
- Step 2: Calculate the fitness value of the population according to Equation (16).
- Step 3: Rank the individuals in the set with their fitness value on each objective.
- Step 4: For each objective, form a new sub-population set with the ranking sequence in Step 3.
- Step 5: Return sub-population sets.
- (4)
- Algorithm flow
- Step 1: Begin by setting the size of the grey wolf group, variable dimensions, and the maximum iteration number. Employ the initialization technique outlined in Equation (26) to set up the waypoint coordinates for each individual grey wolf. Additionally, ensure the proper initialization of the parameters , , and .
- Step 2: Assess the fitness value of each individual grey wolf within the population, with fitness being determined by the total objective value.
- Step 3: Cluster the original population and form new sub-population sets using the strategy outlined in previous section.
- Step 4: Compare the fitness values among the individual grey wolves within the population. Identify the top three grey wolves, referred to as , , and , and make a note of their corresponding waypoint positions.
- Step 5: Update the position for each grey wolf in the population.
- Step 6: Update the parameters , , and according to Equations (20), (21) and (27), respectively.
- Step 7: Check whether the number of iterations meets the specified requirements. If the conditions are met, the algorithm concludes; otherwise, return to Step 3 to continue the process.
4. Results and Discussion
- P-GWO: , , changes from two to zero non-linearly;
- mGWO: , , changes from two to zero linearly, linearly decreases from one to zero, and ;
- SOGWO: , , changes from 2 to 0 non-linearly;
- Weights: , , .
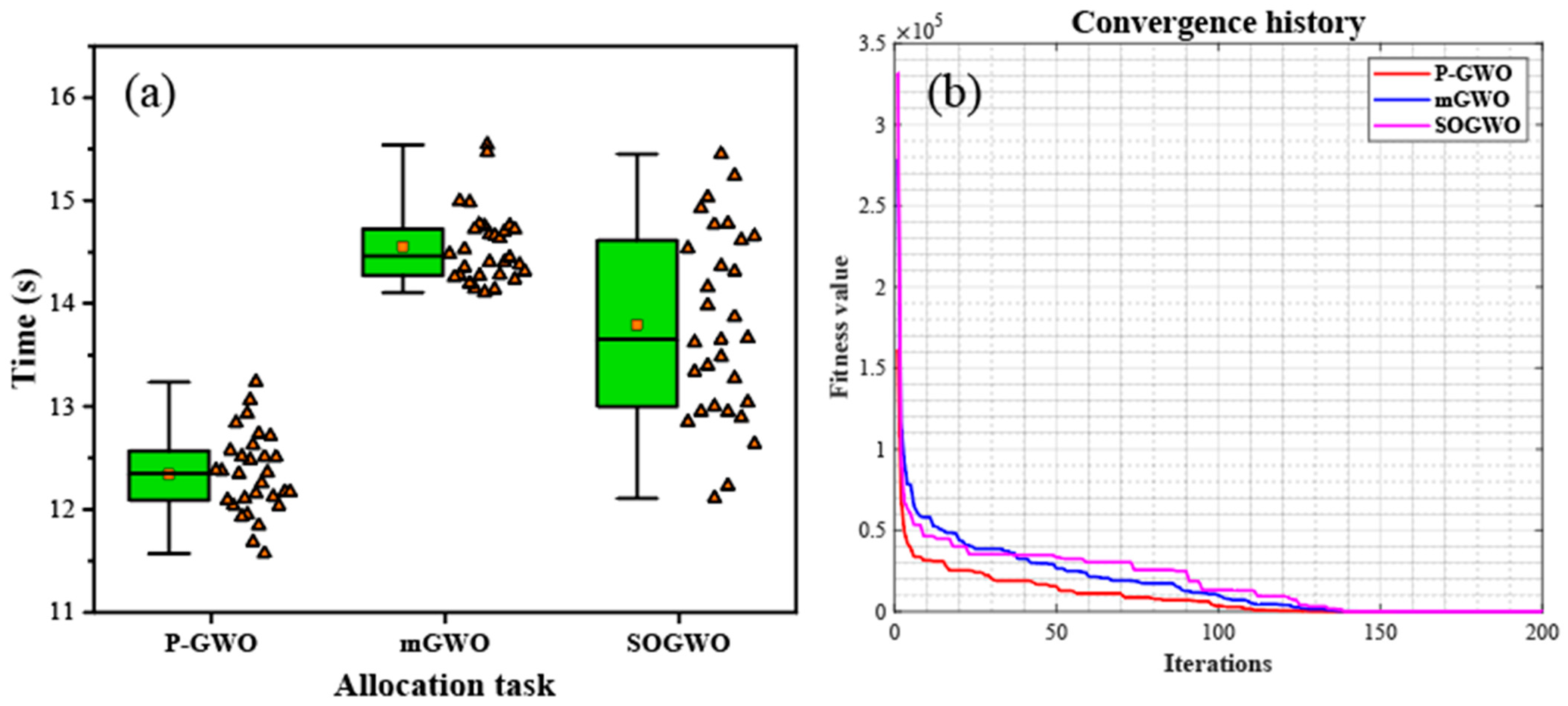
4.1. Simlation 1: Allocation Task
4.2. Simulation 2: Rendezcous Task
5. Conclusions
- The obtained results demonstrate that the problem method proposed in combination with P-GWO is able to consistently address the coordinated path planning problem, thereby contributing to the underwater coordinated missions with specific needs;
- The present study proposes a novel coordinated path planning model for underwater coordinated missions by encapsulating various factors, including potential threats, arrival time windows, space constraints, and physical bounds for each AUV;
- Incorporating the restricted initialization and multi-objective clustering strategy, the Parallel Grey Wolf Optimizer is able to consistently address the coordinated path planning problem. The results demonstrate a 10–15% improvement in the convergence rate and a reduction of over 60% in the average cost value compared to reliable references.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Patil, P.V.; Khan, M.K.; Korulla, M.; Nagarajan, V.; Sha, O.P. Design Optimization of an AUV for Performing Depth Control Maneuver. Ocean Eng. 2022, 266, 112929. [Google Scholar] [CrossRef]
- Topini, E.; Fanelli, F.; Topini, A.; Pebody, M.; Ridolfi, A.; Phillips, A.B.; Allotta, B. An Experimental Comparison of Deep Learning Strategies for AUV Navigation in DVL-Denied Environments. Ocean Eng. 2023, 274, 114034. [Google Scholar] [CrossRef]
- Remmas, W.; Chemori, A.; Kruusmaa, M. Fault-Tolerant Control Allocation for a Bio-Inspired Underactuated AUV in the Presence of Actuator Failures: Design and Experiments. Ocean Eng. 2023, 285, 115327. [Google Scholar] [CrossRef]
- Szczotka, M. AUV Launch & Recovery Handling Simulation on a Rough Sea. Ocean Eng. 2022, 246, 110509. [Google Scholar]
- Ebrahimi, M.; Salehi, S.M. Enhancing the Dynamics of an Oceanic AUV by a Coupled-Fins-Propulsors Roll Control System. Ocean Eng. 2021, 234, 109182. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Wang, F.; Bai, J. Path Planning for Autonomous Surface Vessels Based on Improved Artificial Fish Swarm Algorithm: A Further Study. Ships Offshore Struct. 2022, 18, 1325–1337. [Google Scholar] [CrossRef]
- Wu, L.; Li, Y.; Liu, K.; Sun, X.; Wang, S.; Ai, X.; Yan, S.; Li, S.; Feng, X. Hydrodynamic Performance of AUV Free Running Pushed by a Rotating Propeller with Physics-Based Simulations. Ships Offshore Struct. 2021, 16, 852–864. [Google Scholar] [CrossRef]
- Ebrahimi, M.; Kamali, A.; Abbaspour, M. Enhancing the Roll Dynamics of an AUV by Contra-Rotating-Propellers. Ships Offshore Struct. 2021, 16, 787–796. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, M.; Yan, X. Multi-Objective Path Planning for Unmanned Surface Vehicle with Currents Effects. ISA Trans. 2018, 75, 137–156. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global-Local Hierarchical Path Planning Scheme for Unmanned Surface Vehicles under Dynamically Unforeseen Environments. Ocean Eng. 2023, 280, 114750. [Google Scholar] [CrossRef]
- MahmoudZadeh, S.; Yazdani, A.M.; Sammut, K.; Powers, D.M. Online Path Planning for AUV Rendezvous in Dynamic Cluttered Undersea Environment Using Evolutionary Algorithms. Appl. Soft Comput. 2018, 70, 929–945. [Google Scholar] [CrossRef]
- Filaretov, V.; Yukhimets, D. The Method of Path Planning for AUV-Group Moving in Desired Formation in Unknown Environment with Obstacles. IFAC-PapersOnLine 2020, 53, 14650–14655. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H.; Jembre, Y.Z.; Kim, D. An Energy-Efficient Data Collection Protocol with AUV Path Planning in the Internet of Underwater Things. J. Netw. Comput. Appl. 2019, 135, 20–31. [Google Scholar] [CrossRef]
- Li, X.; Yu, S. Three-Dimensional Path Planning for AUVs in Ocean Currents Environment Based on an Improved Compression Factor Particle Swarm Optimization Algorithm. Ocean Eng. 2023, 280, 114610. [Google Scholar] [CrossRef]
- Tanha, S.D.N.; Dehkordi, S.F.; Korayem, A.H. Control a Mobile Robot in Social Environments by Considering Human as a Moving Obstacle. In Proceedings of the 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), Tehran, Iran, 23–25 October 2018; pp. 256–260. [Google Scholar]
- Hao, K.; Zhao, J.; Li, Z.; Liu, Y.; Zhao, L. Dynamic Path Planning of a Three-Dimensional Underwater AUV Based on an Adaptive Genetic Algorithm. Ocean Eng. 2022, 263, 112421. [Google Scholar] [CrossRef]
- Sun, Y.; Gu, R.; Chen, X.; Sun, R.; Xin, L.; Bai, L. Efficient Time-Optimal Path Planning of AUV under the Ocean Currents Based on Graph and Clustering Strategy. Ocean Eng. 2022, 259, 111907. [Google Scholar] [CrossRef]
- Vinoth Kumar, S.; Jayaparvathy, R.; Priyanka, B.N. Efficient Path Planning of AUVs for Container Ship Oil Spill Detection in Coastal Areas. Ocean Eng. 2020, 217, 107932. [Google Scholar] [CrossRef]
- Chen, G.; Shen, Y.; Qu, N.; He, B. Path Planning of AUV during Diving Process Based on Behavioral Decision-Making. Ocean Eng. 2021, 234, 109073. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global Path Planning and Waypoint Following for Heterogeneous Unmanned Surface Vehicles Assisting Inland Water Monitoring. J. Ocean Eng. Sci. 2023, in press. [Google Scholar] [CrossRef]
- Bai, G.; Chen, Y.; Hu, X.; Shi, Y.; Jiang, W.; Zhang, X. Multi-AUV Dynamic Trajectory Optimization and Collaborative Search Combined with Task Urgency and Energy Consumption Scheduling in 3-D Underwater Environment with Random Ocean Currents and Uncertain Obstacles. Ocean Eng. 2023, 275, 113841. [Google Scholar] [CrossRef]
- Cui, R.; Li, Y.; Yan, W. Mutual Information-Based Multi-AUV Path Planning for Scalar Field Sampling Using Multidimensional RRT. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 993–1004. [Google Scholar] [CrossRef]
- Yu, X.; Chen, W.-N.; Hu, X.-M.; Gu, T.; Yuan, H.; Zhou, Y.; Zhang, J. Path Planning in Multiple-AUV Systems for Difficult Target Traveling Missions: A Hybrid Metaheuristic Approach. IEEE Trans. Cogn. Dev. Syst. 2020, 12, 561–574. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S. Multi-AUV Adaptive Path Planning and Cooperative Sampling for Ocean Scalar Field Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Chen, M.; Zhu, D. A Workload Balanced Algorithm for Task Assignment and Path Planning of Inhomogeneous Autonomous Underwater Vehicle System. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 483–493. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Emary, E.; Zawbaa, H.M.; Hassanien, A.E. Binary Grey Wolf Optimization Approaches for Feature Selection. Neurocomputing 2016, 172, 371–381. [Google Scholar] [CrossRef]
- Radmanesh, M.; Kumar, M.; Sarim, M. Grey Wolf Optimization Based Sense and Avoid Algorithm in a Bayesian Framework for Multiple UAV Path Planning in an Uncertain Environment. Aerosp. Sci. Technol. 2018, 77, 168–179. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Load Frequency Control of Interconnected Power System Using Grey Wolf Optimization. Swarm Evol. Comput. 2016, 27, 97–115. [Google Scholar] [CrossRef]
- Jiaqi, S.; Li, T.; Hongtao, Z.; Xiaofeng, L.; Tianying, X. Adaptive Multi-UAV Path Planning Method Based on Improved Gray Wolf Algorithm. Comput. Electr. Eng. 2022, 104, 108377. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A Hybrid Algorithm Based on Grey Wolf Optimizer and Differential Evolution for UAV Path Planning. Expert Syst. Appl. 2023, 215, 119327. [Google Scholar] [CrossRef]
- Jiang, W.; Lyu, Y.; Li, Y.; Guo, Y.; Zhang, W. UAV Path Planning and Collision Avoidance in 3D Environments Based on POMPD and Improved Grey Wolf Optimizer. Aerosp. Sci. Technol. 2022, 121, 107314. [Google Scholar] [CrossRef]
- Cai, J.; Zhang, F.; Sun, S.; Li, T. A Meta-Heuristic Assisted Underwater Glider Path Planning Method. Ocean Eng. 2021, 242, 110121. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhong, M.; Zhang, J. A Novel Reinforcement Learning Based Grey Wolf Optimizer Algorithm for Unmanned Aerial Vehicles (UAVs) Path Planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Dhargupta, S.; Ghosh, M.; Mirjalili, S.; Sarkar, R. Selective Opposition Based Grey Wolf Optimization. Expert Syst. Appl. 2020, 151, 113389. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A Memory-Based Grey Wolf Optimizer for Global Optimization Tasks. Appl. Soft Comput. 2020, 93, 106367. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Average Time Cost (s) | Objective Value |
|---|---|---|
| P-GWO | 12.321 | 0.292 |
| mGWO | 14.572 | 0.424 |
| SOGWO | 13.713 | 0.577 |
| Travel Distance (m) | Speed (m/s) | Arrival Time (s) | Time Windows (s) | |
|---|---|---|---|---|
| AUV 1 | 1382.9 | 2.64 | 523.8 | [460.9, 691.4] |
| AUV 2 | 1187.4 | 2.34 | 507.4 | [395.8, 593.7] |
| AUV 3 | 1057.8 | 2.01 | 526.3 | [352.6, 528.9] |
| AUV 4 | 1076.4 | 2.05 | 525.1 | [358.8, 538.2] |
| Methods | Average Time Cost (s) | Objective Value |
|---|---|---|
| P-GWO | 13.406 | 0.374 |
| mGWO | 16.872 | 0.589 |
| SOGWO | 14.439 | 0.569 |
| Travel Distance (m) | Speed (m/s) | Arrival Time (s) | Time Windows (s) | |
|---|---|---|---|---|
| AUV 1 | 1292.5 | 2.29 | 564.4 | [430.82, 646.24] |
| AUV 2 | 1122.6 | 2.09 | 537.1 | [374.20, 561.31] |
| AUV 3 | 1103.4 | 2.01 | 548.9 | [367.79, 551.68] |
| AUV 4 | 1165.4 | 2.11 | 552.3 | [388.45, 582.68] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Zhao, L. Coordinated Trajectory Planning for Multiple Autonomous Underwater Vehicles: A Parallel Grey Wolf Optimizer. J. Mar. Sci. Eng. 2023, 11, 1720. https://doi.org/10.3390/jmse11091720
Wang F, Zhao L. Coordinated Trajectory Planning for Multiple Autonomous Underwater Vehicles: A Parallel Grey Wolf Optimizer. Journal of Marine Science and Engineering. 2023; 11(9):1720. https://doi.org/10.3390/jmse11091720
Chicago/Turabian StyleWang, Fang, and Liang Zhao. 2023. "Coordinated Trajectory Planning for Multiple Autonomous Underwater Vehicles: A Parallel Grey Wolf Optimizer" Journal of Marine Science and Engineering 11, no. 9: 1720. https://doi.org/10.3390/jmse11091720
APA StyleWang, F., & Zhao, L. (2023). Coordinated Trajectory Planning for Multiple Autonomous Underwater Vehicles: A Parallel Grey Wolf Optimizer. Journal of Marine Science and Engineering, 11(9), 1720. https://doi.org/10.3390/jmse11091720