
Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances


Abstract
:1. Introduction
- (1)
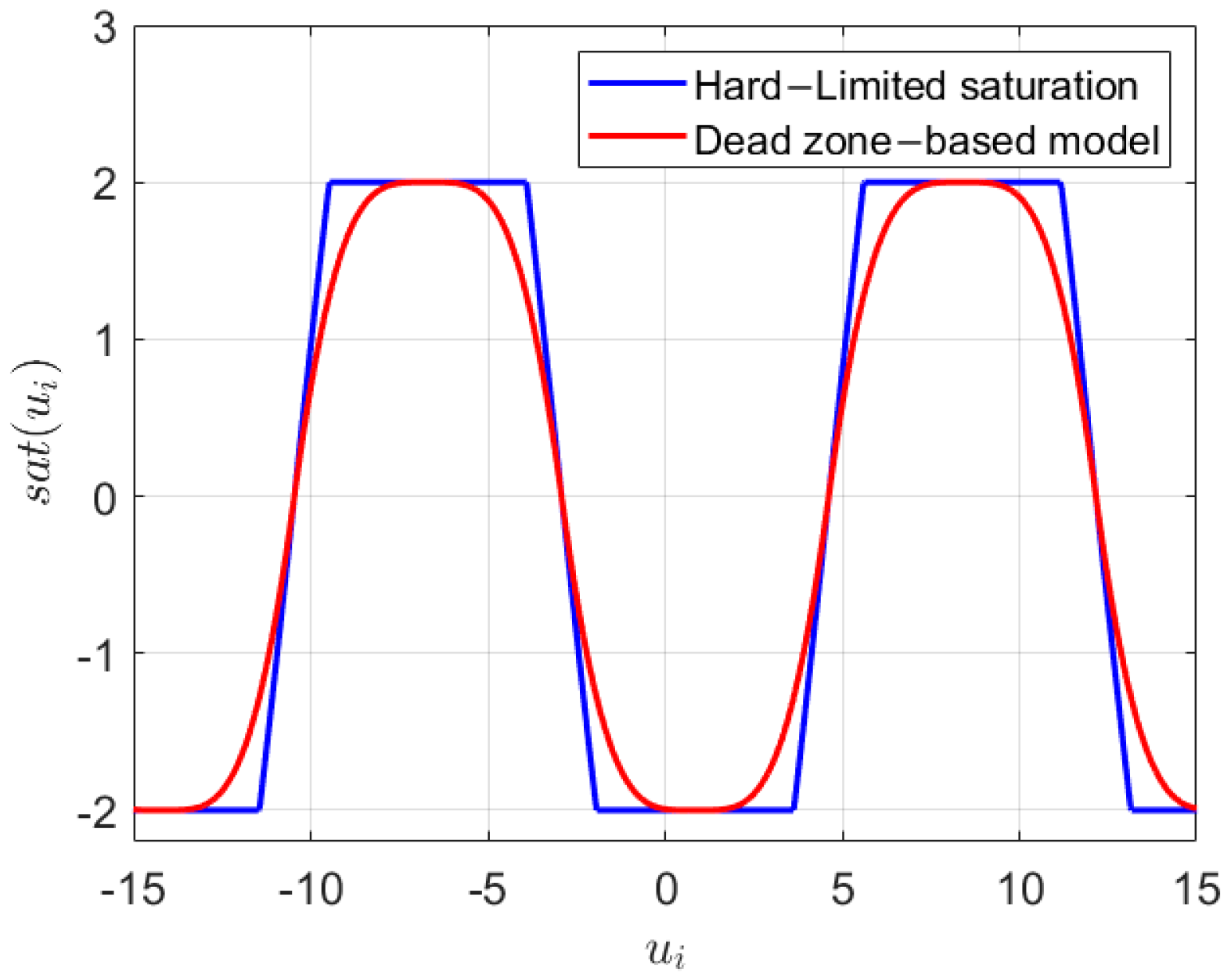
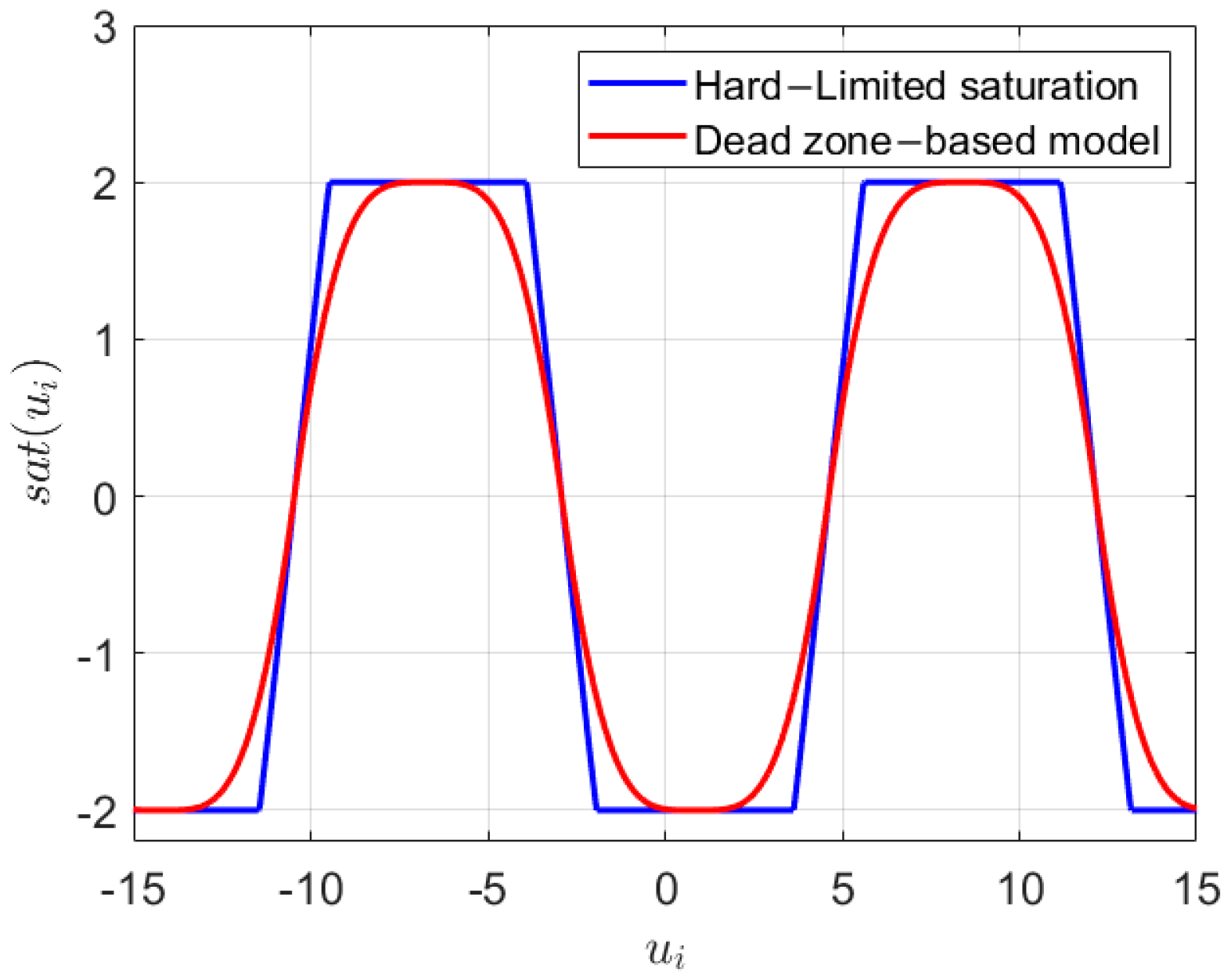
- Considering the under-actuated nature of the unmanned vehicle, where there is no independent actuator in the swaying velocity direction, the direct application of feedback linearization becomes challenging. In this paper, a state-extension technique based on coordinate transformation is employed to rewrite the control model. Additionally, the potential negative impact of saturation constraints on control stability is addressed by utilizing a smooth dead-zone-based model instead of the conventional hard saturation model. This approach not only facilitates the subsequent controller design but also ensures the control stability in the presence of saturation constraints;
- (2)
- In the trajectory tracking control of under-actuated USVs, a model-parameter-free controller is utilized, simplifying the design process by reducing the number of adjustable parameters. By employing the back-stepping control design process, it is demonstrated that the proposed control mechanism performs effectively within the specified performance framework. Moreover, the convergence time can be specified, allowing for the desired control performance to be achieved within a predefined timeframe.
2. Problem Formulation
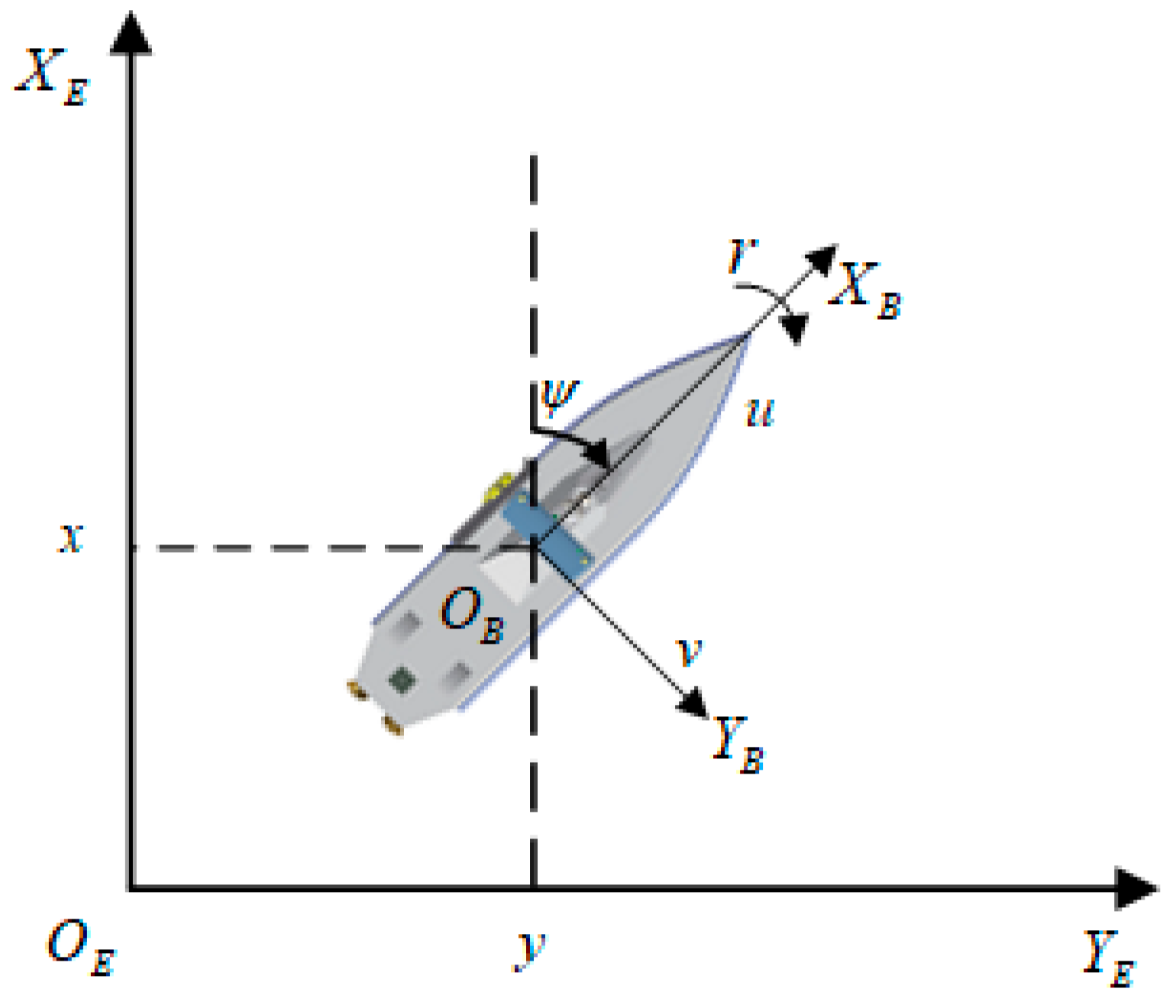
2.1. Dynamics of Under-Actuated USV
2.2. Saturation Constraints
2.3. Prescribed Time–Prescribed Performance Function
- (1)
- For any , is a positive function;.
- (2)
- The function is monotonic decreasing on the interval ;
- (3)
- The equation holds .
2.4. Control Objective
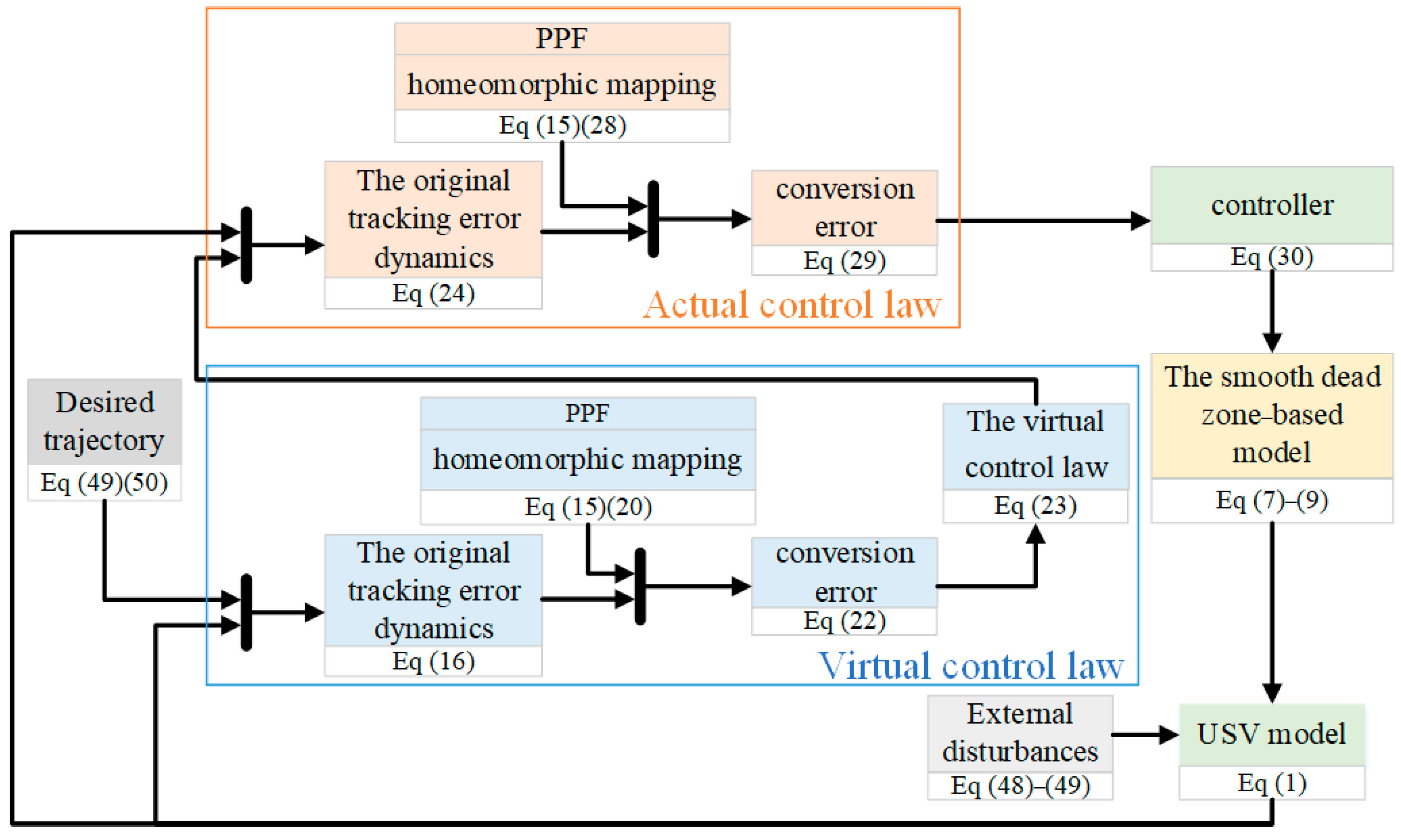
3. Model-Parameter-Free Controller Design
4. Simulations
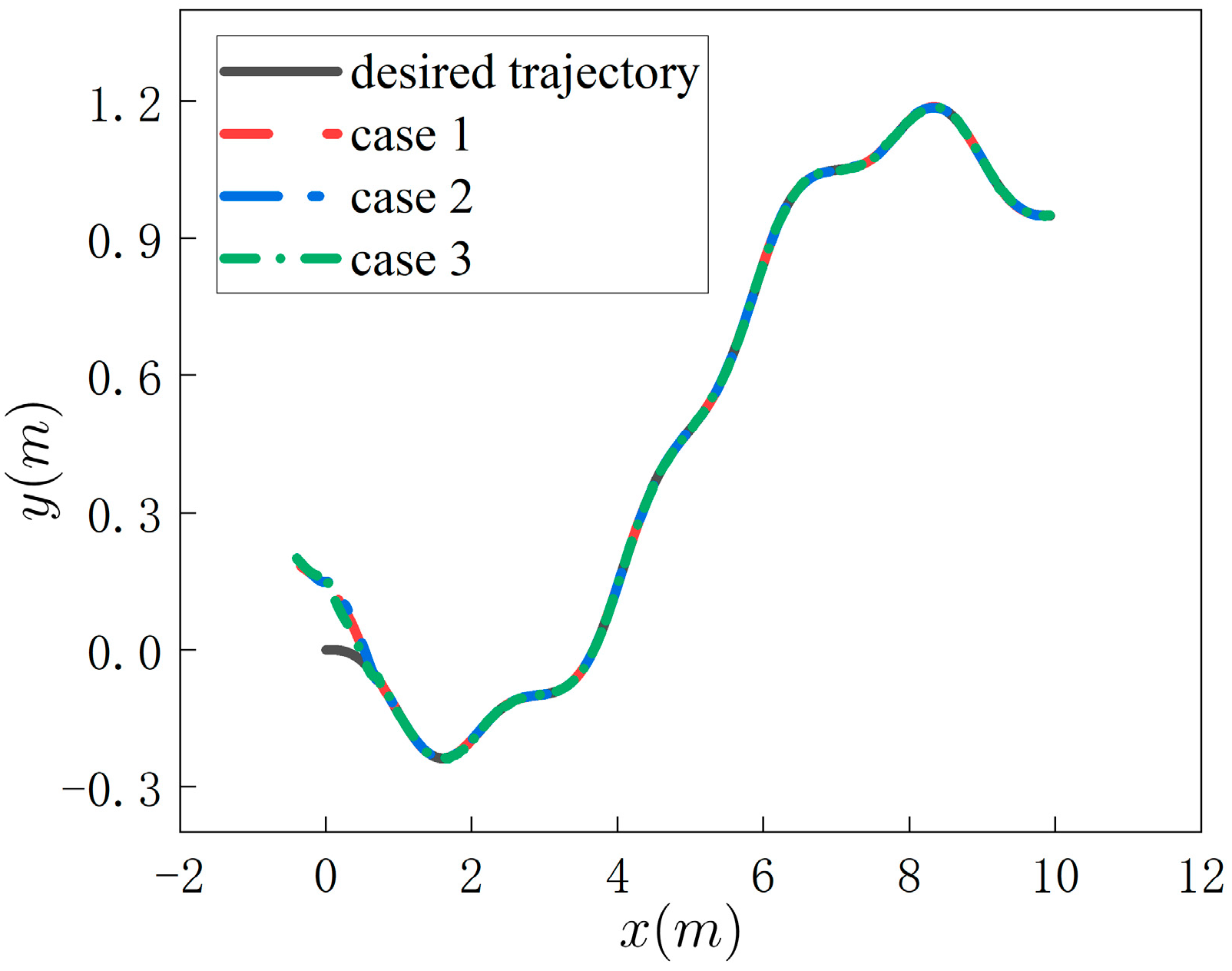
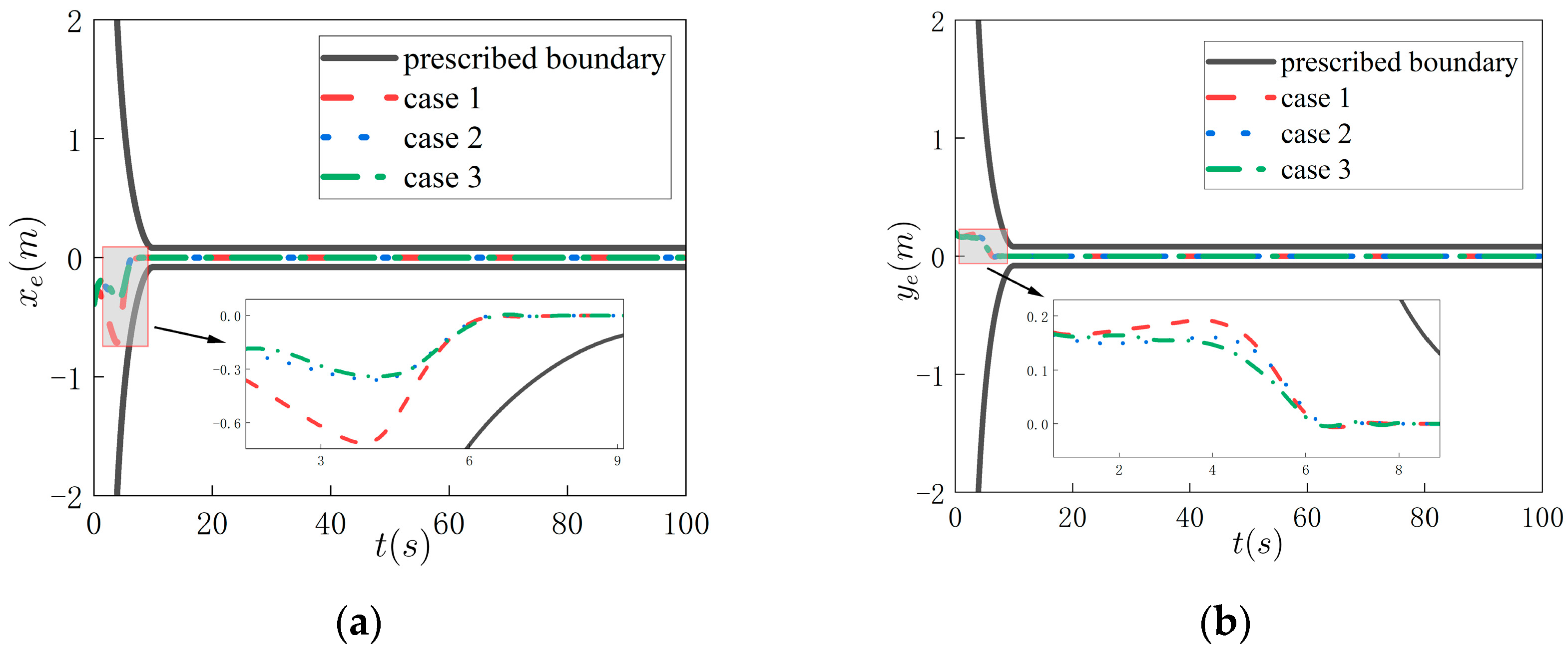
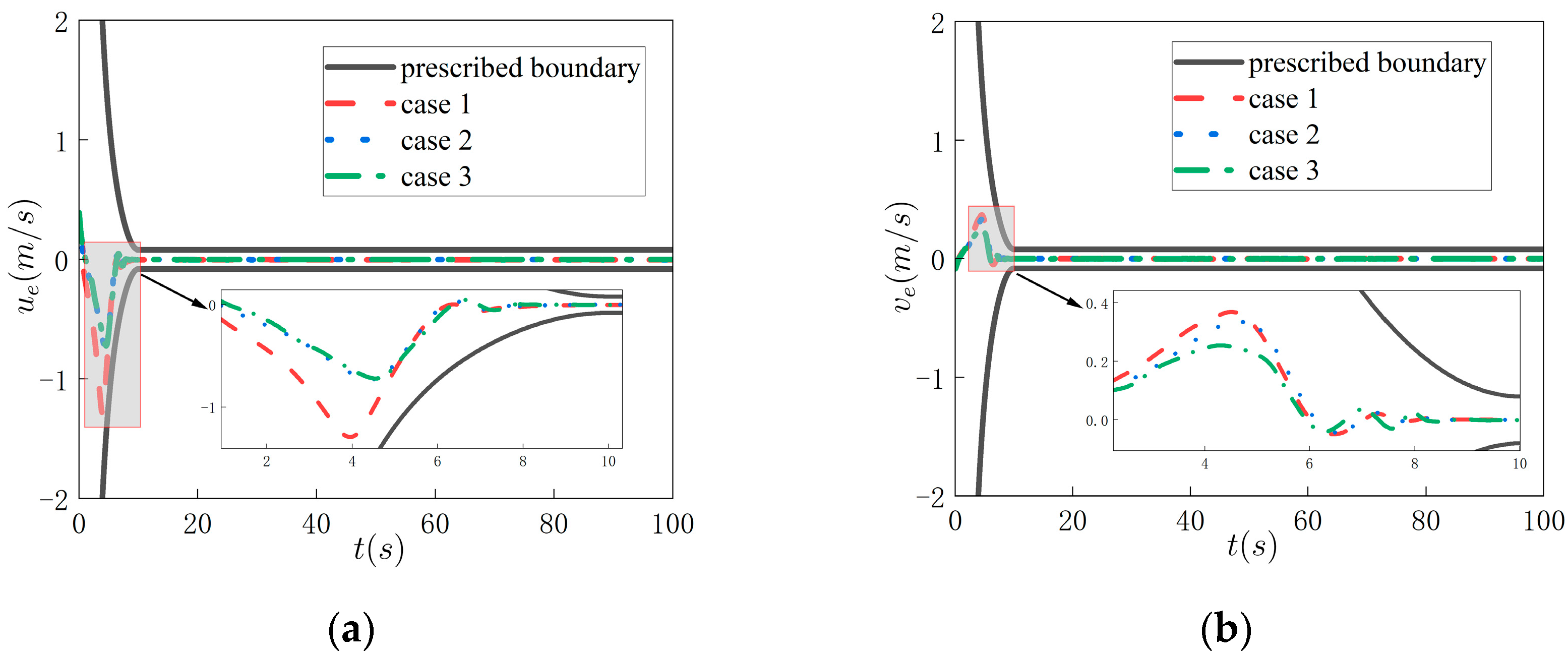
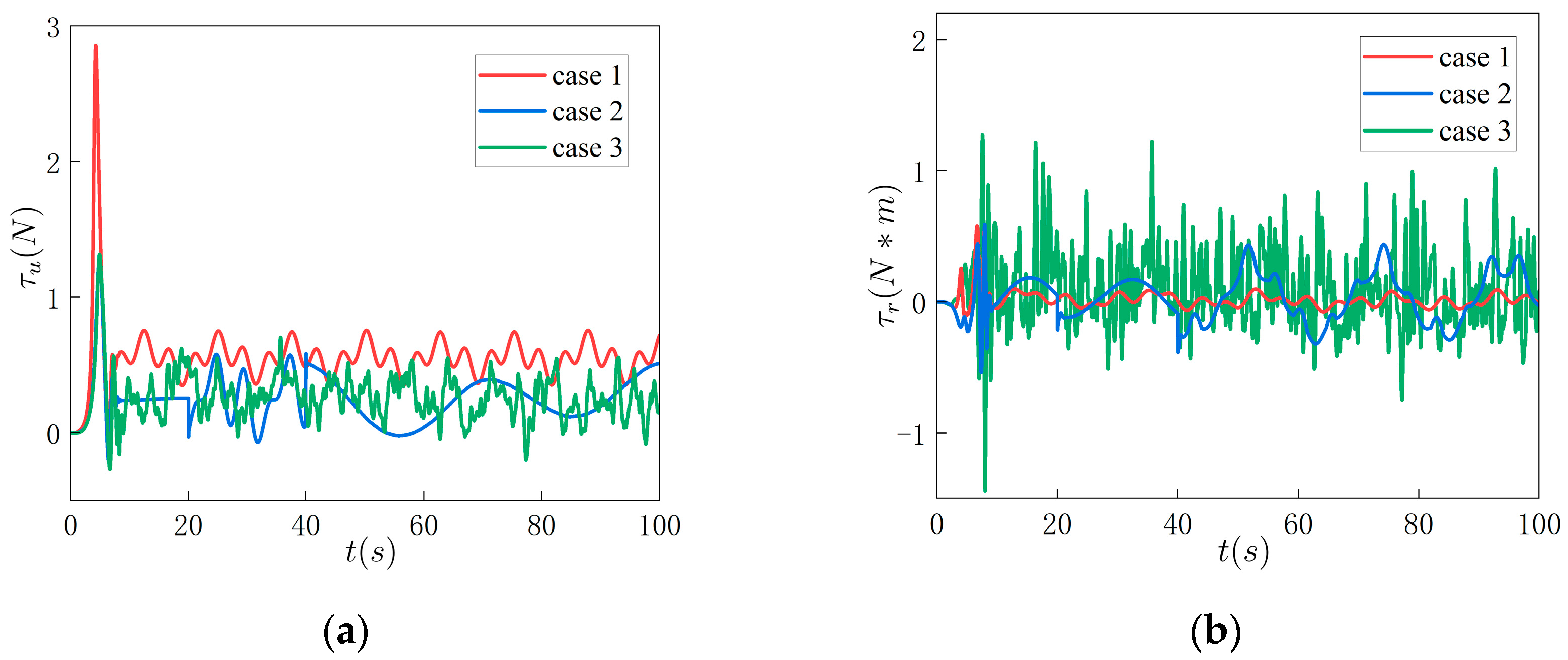
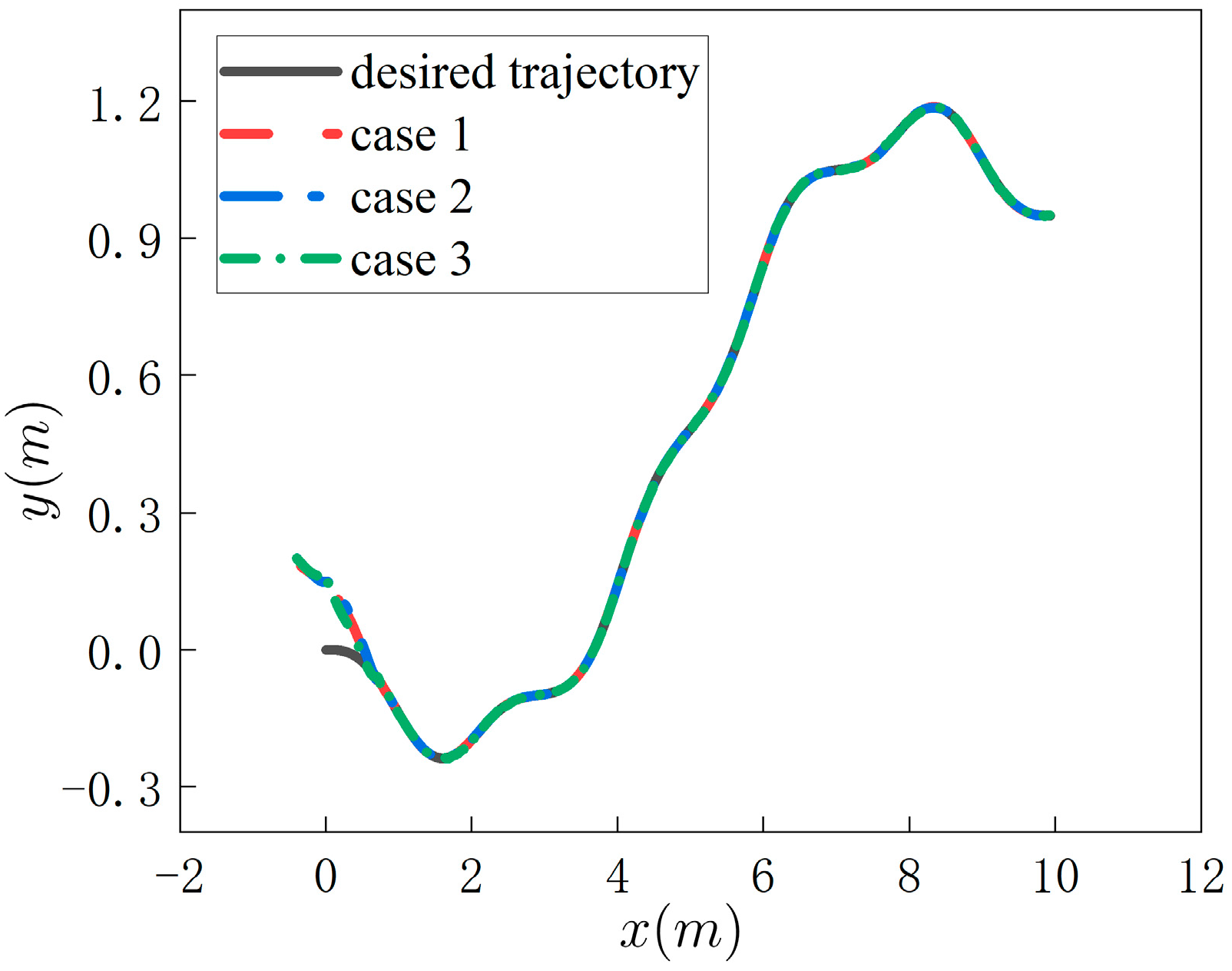
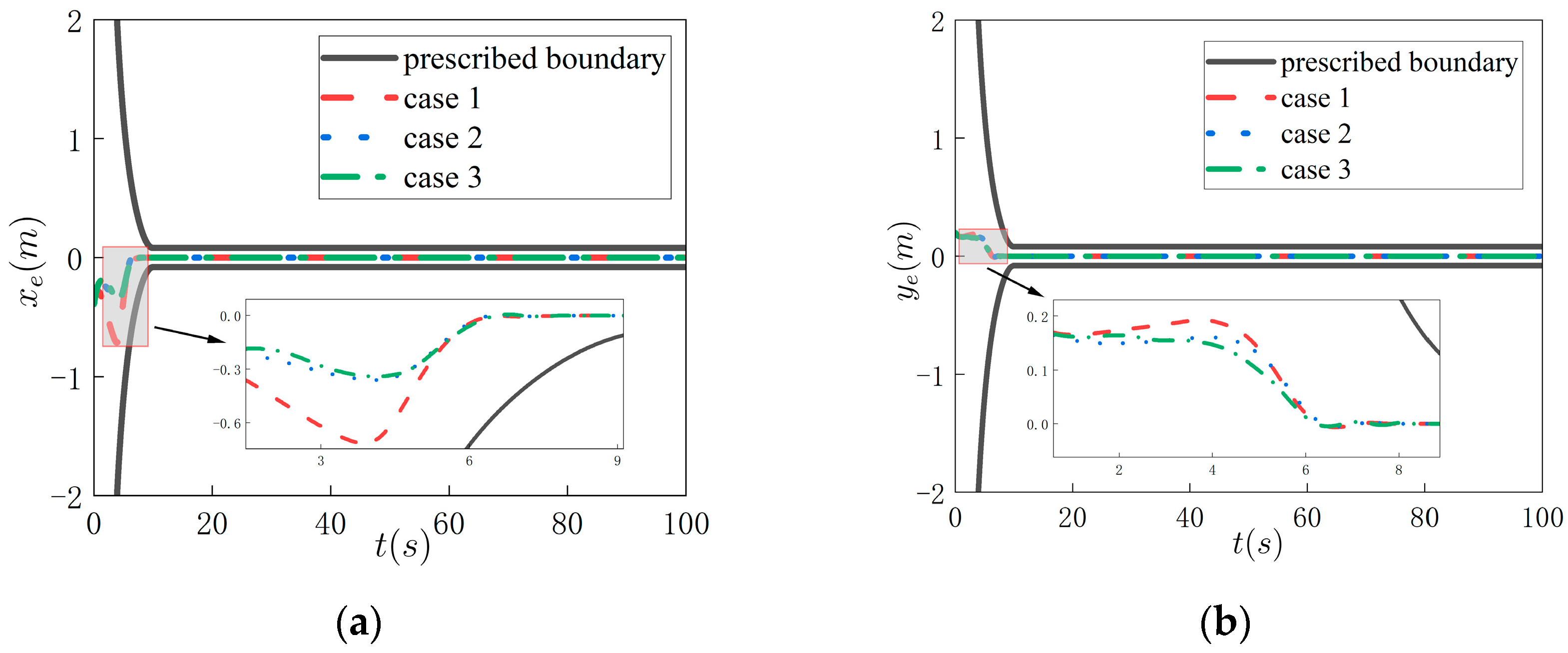
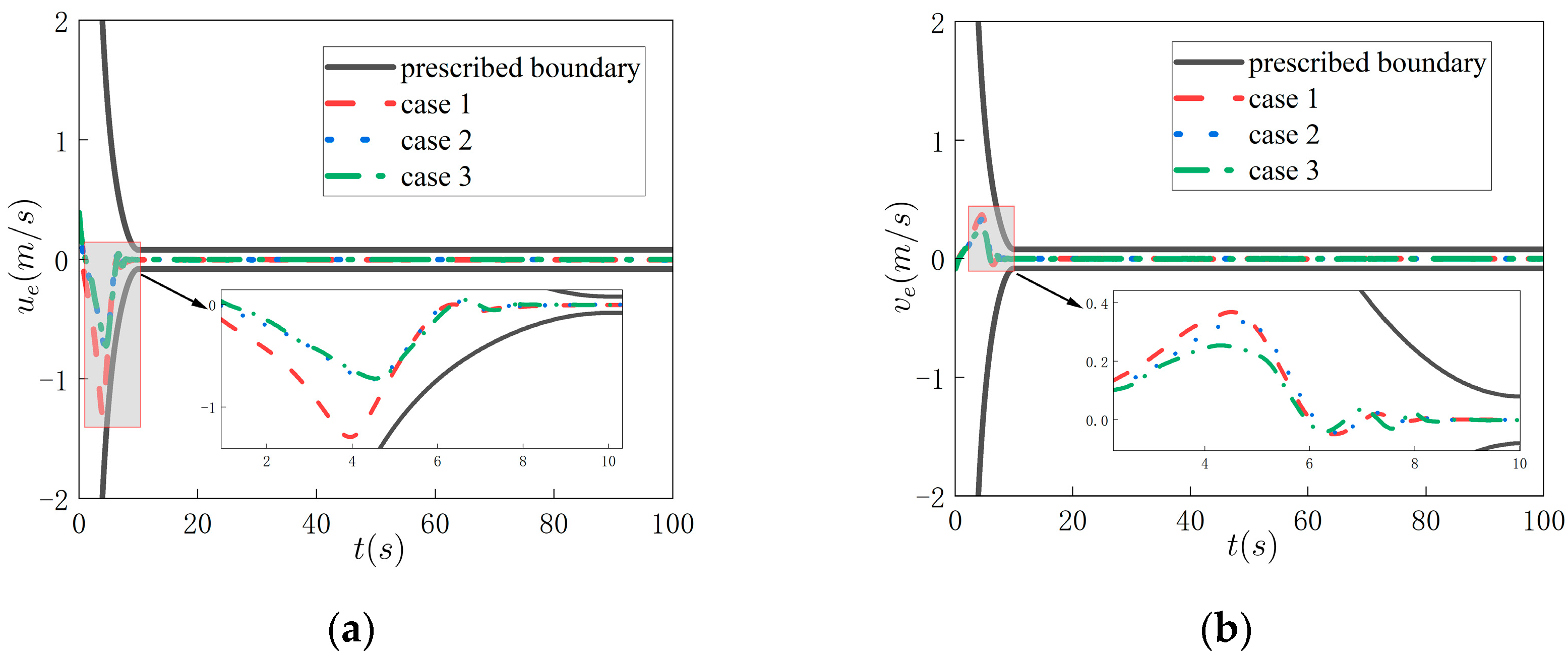
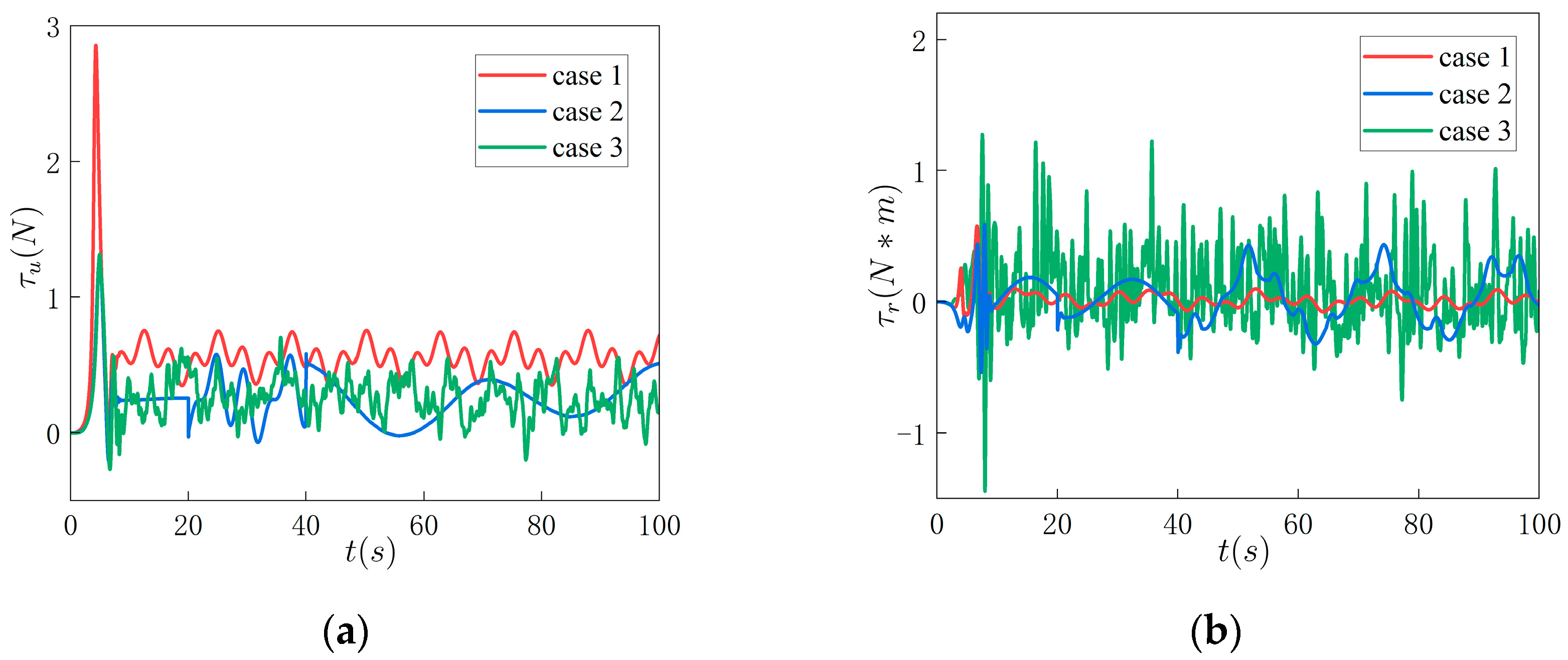
4.1. Robustness Verification
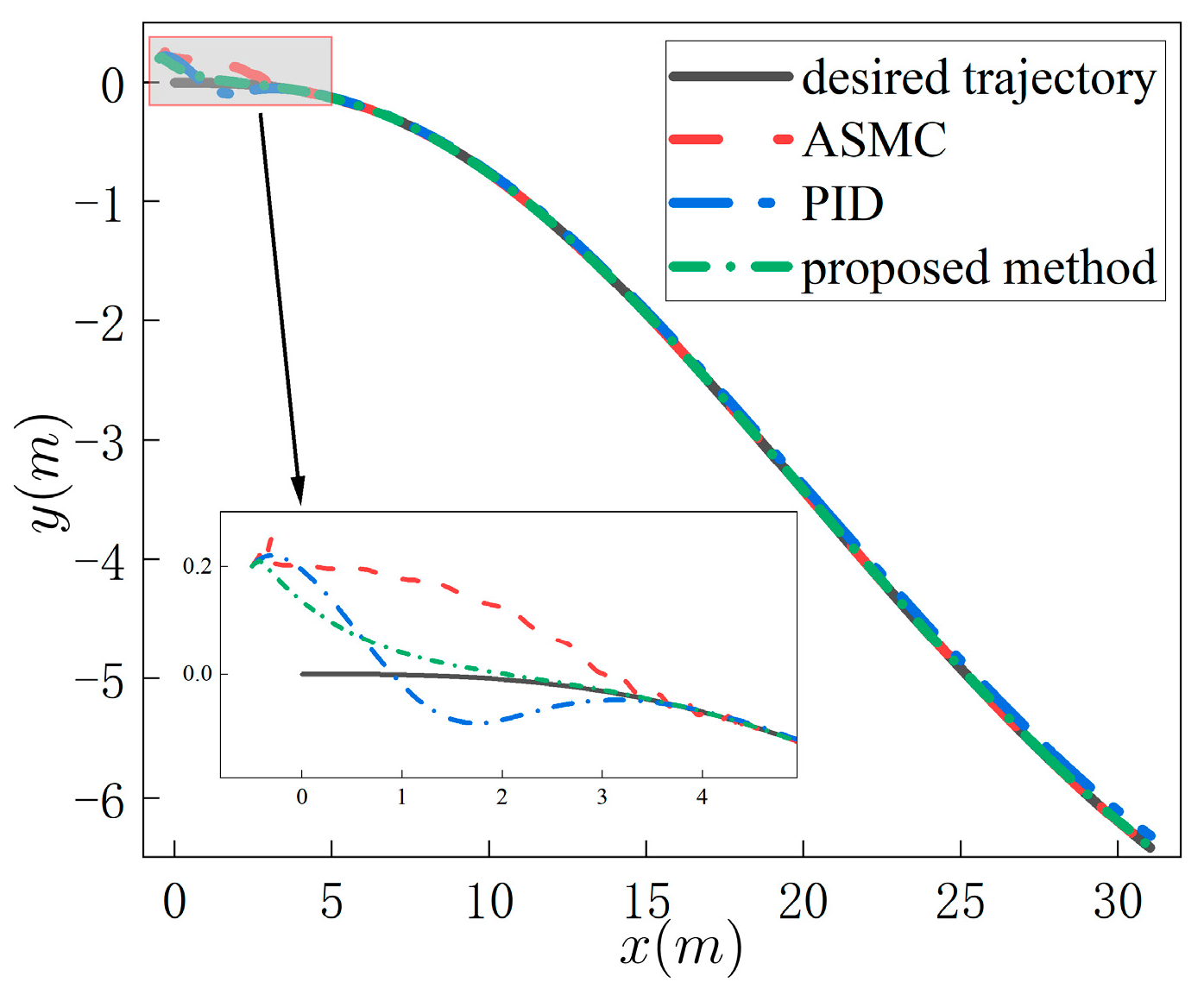
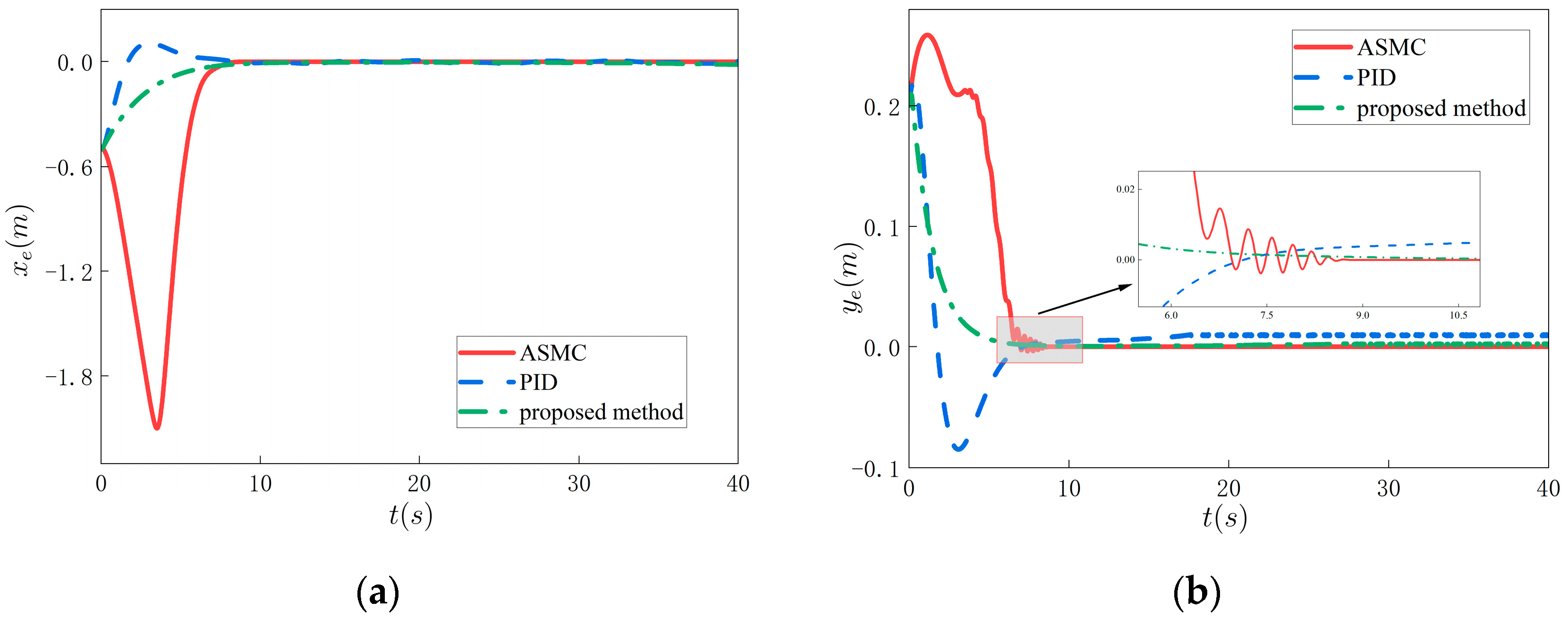
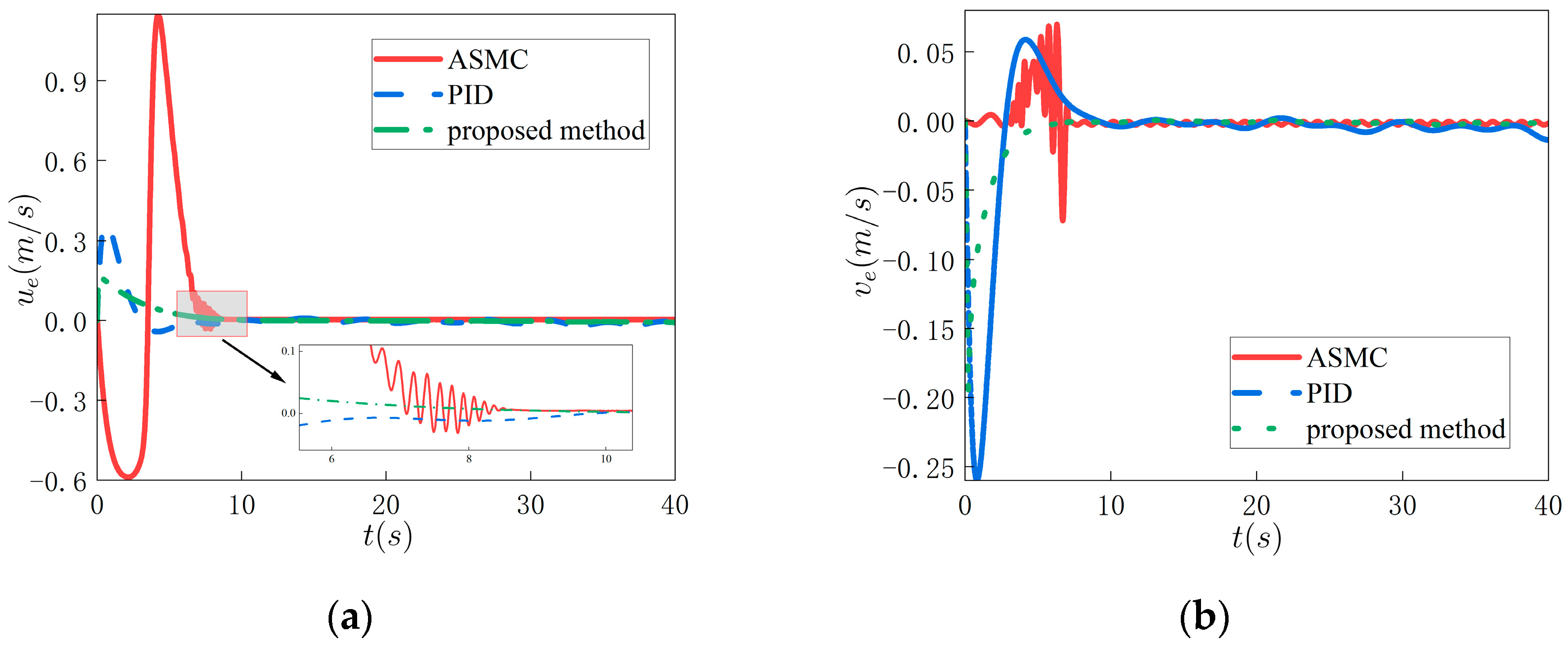
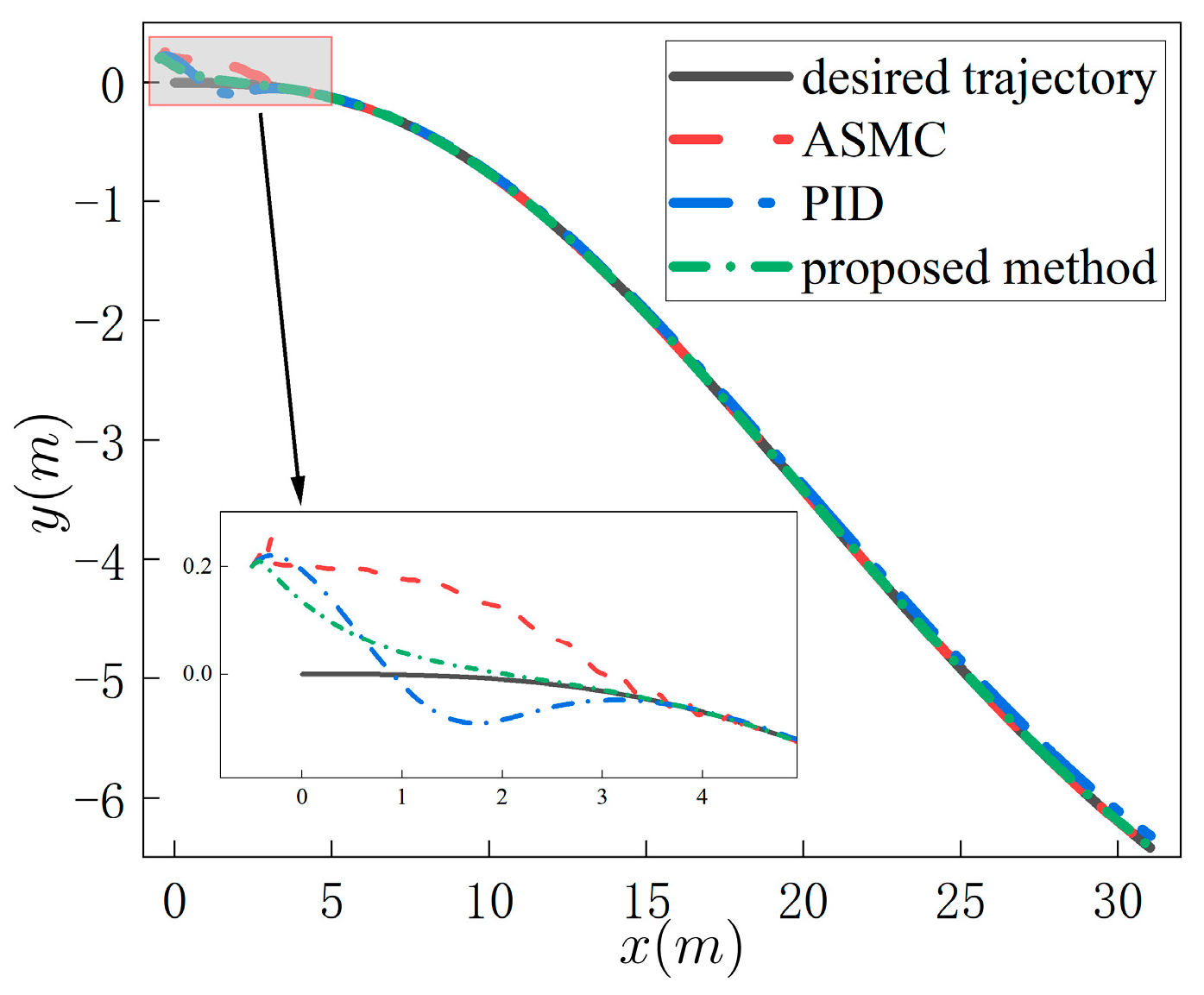
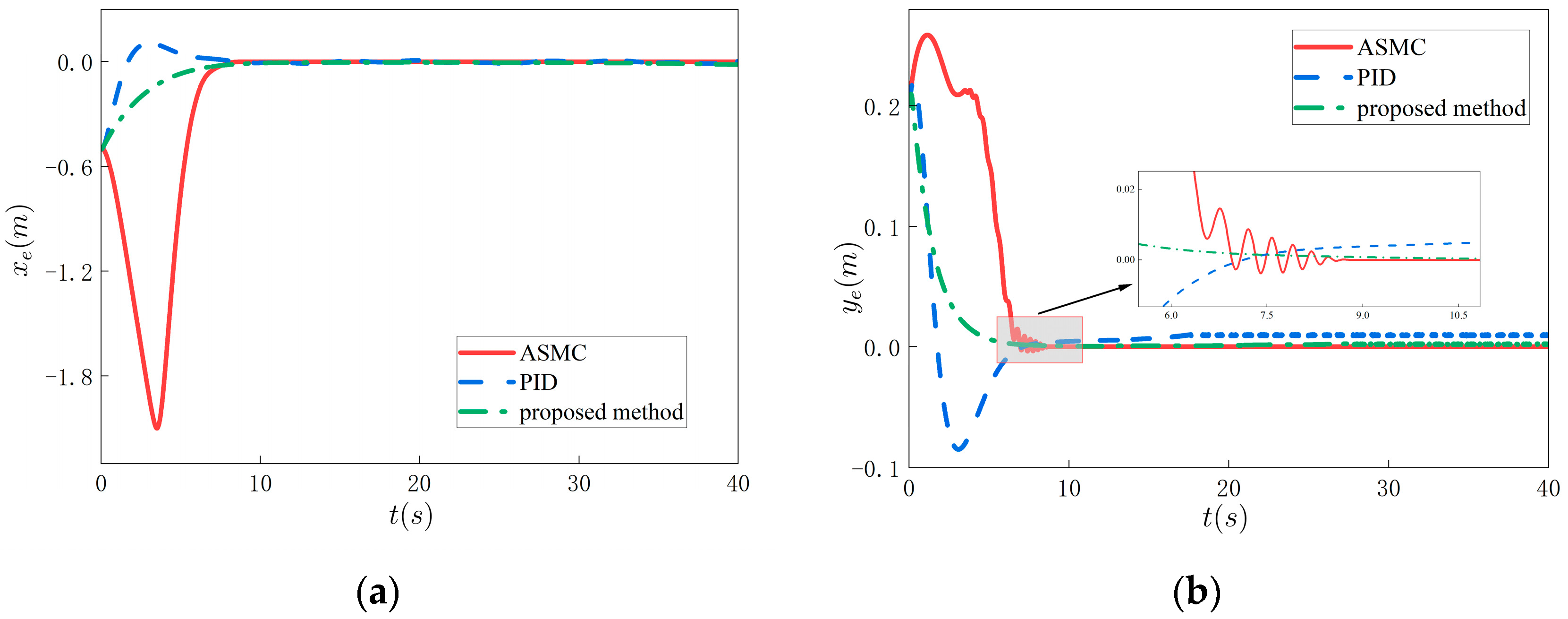
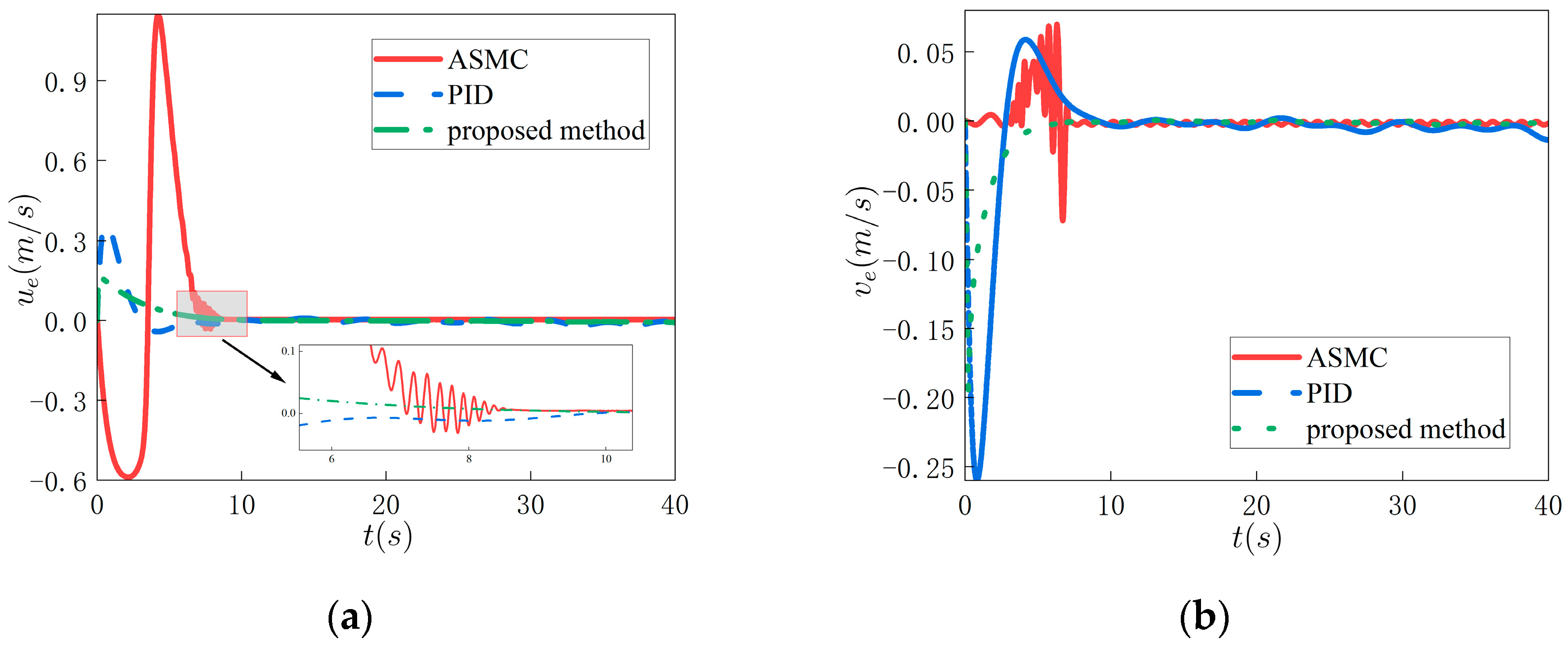
4.2. Advantages Highlight
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- PID control scheme
- 2.
- Adaptive SMC control scheme
References
- Abrougui, H.; Nejim, S.; Hachicha, S.; Zaoui, C.; Dallagi, H. Modeling, parameter identification, guidance and control of an unmanned surface vehicle with experimental results. Ocean Eng. 2021, 241, 110038. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned Maritime Vehicles, 20 years of commercial and technical evolution. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Zhu, C.; Huang, B.; Lu, Y.; Li, X.; Su, Y. Distributed Affine Formation Maneuver Control of Autonomous Surface Vehicles With Event-Triggered Data Transmission Mechanism. IEEE Trans. Control Syst. Technol. 2023, 31, 1006–1017. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Li, Z. A Novel Fixed-Time Trajectory Tracking Strategy of Unmanned Surface Vessel Based on the Fractional Sliding Mode Control Method. Electronics 2022, 11, 726. [Google Scholar] [CrossRef]
- Chen, X.; Zhou, D.; Liu, Z.; Zhang, J.; Wang, L. Adaptive sliding-mode trajectory tracking control of underactuated unmanned surface vessels. Guofang Keji Daxue Xuebao/J. Natl. Univ. Def. Technol. 2018, 40, 127–134. [Google Scholar] [CrossRef]
- Dong, J.; Zhao, M.; Cheng, M.; Wang, Y. Integral terminal sliding-mode integral backstepping adaptive control for trajectory tracking of unmanned surface vehicle. Cyber-Phys. Syst. 2023, 9, 77–96. [Google Scholar] [CrossRef]
- Guo, H.; Chen, M.; Jiang, Y.; Lungu, M. Distributed Adaptive Human-in-the-Loop Event-Triggered Formation Control for QUAVs With Quantized Communication. IEEE Trans. Ind. Inform. 2023, 19, 7572–7582. [Google Scholar] [CrossRef]
- Dong, Z.; Wan, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef]
- Van, M.; Do, V.-T.; Khyam, M.O.; Do, X.P. Tracking control of uncertain surface vessels with global finite-time convergence. Ocean Eng. 2021, 241, 109974. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems With Prescribed Performance. IEEE Trans. Autom. Control. 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Neural network-based target tracking control of underactuated autonomous underwater vehicles with a prescribed performance. Ocean Eng. 2018, 167, 239–256. [Google Scholar] [CrossRef]
- Guo, Z.; Oliveira, T.R.; Guo, J.; Wang, Z. Performance-Guaranteed Adaptive Asymptotic Tracking for Nonlinear Systems With Unknown Sign-Switching Control Direction. IEEE Trans. Autom. Control 2023, 68, 1077–1084. [Google Scholar] [CrossRef]
- Yuhan, Z.; Kun, W.; Wei, S.; Zhou, L.; Zhongzhong, Z.; Hao, J.G. Back-Stepping Formation Control of Unmanned Surface Vehicles With Input Saturation Based on Adaptive Super-Twisting Algorithm. IEEE Access 2022, 10, 114885–114896. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Dong, D.; Yang, S. Saturated-command-deviation based finite-time adaptive control for dynamic positioning of USV with prescribed performance. Ocean Eng. 2022, 266, 112941. [Google Scholar] [CrossRef]
- Chen, B.; Tan, L. Adaptive Anti-saturation Tracking Control with Prescribed Performance for Hypersonic Vehicle. Int. J. Control Autom. Syst. 2020, 18, 394–404. [Google Scholar] [CrossRef]
- Ik Han, S.; Lee, J. Finite-time sliding surface constrained control for a robot manipulator with an unknown dead-zone and disturbance. ISA Trans. 2016, 65, 307–318. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Zheng, W.; Zhou, X.; Shao, S. Adaptive dynamic surface and sliding mode tracking control for uncertain QUAV with time-varying load and appointed-time prescribed performance. J. Frankl. Inst. 2021, 358, 4178–4208. [Google Scholar] [CrossRef]
- Fan, Y.; Jing, W.; Bernelli-Zazzera, F. Nonlinear Tracking Differentiator Based Prescribed Performance Control for Space Manipulator. Int. J. Control Autom. Syst. 2023, 21, 876–889. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, E.; Li, J.; Huang, B.; Su, Y. Approximation-free appointed-time tracking control for marine surface vessel with actuator faults and input saturation. Ocean Eng. 2022, 245, 110468. [Google Scholar] [CrossRef]
- Mishra, P.K.; Jagtap, P. Approximation-Free Prescribed Performance Control With Prescribed Input Constraints. IEEE Control Syst. Lett. 2023, 7, 1261–1266. [Google Scholar] [CrossRef]
- Wu, Y.; Li, B.; Du, H.; Zhang, N.; Zhang, B. Fault-tolerant prescribed performance control of active suspension based on approximation-free method. Veh. Syst. Dyn. 2022, 60, 1642–1667. [Google Scholar] [CrossRef]
- Cao, G.; Yang, J.; Qiao, L.; Yang, Z.; Zhang, W. Adaptive output feedback super twisting algorithm for trajectory tracking control of USVs with saturated constraints. Ocean Eng. 2022, 259, 111507. [Google Scholar] [CrossRef]
- Qin, H.; Li, C.; Sun, Y. Adaptive neural network-based fault-tolerant trajectory-tracking control of unmanned surface vessels with input saturation and error constraints. IET Intell. Transp. Syst. 2020, 14, 356–363. [Google Scholar] [CrossRef]
- Trakas, P.S.; Bechlioulis, C.P. Robust Adaptive Prescribed Performance Control for Unknown Nonlinear Systems with Input Amplitude and Rate Constraints. IEEE Control. Syst. Lett. 2023, 7, 1801–1806. [Google Scholar] [CrossRef]
- Guo, G.; Zhang, P. Asymptotic Stabilization of USVs with Actuator Dead-Zones and Yaw Constraints Based on Fixed-Time Disturbance Observer. IEEE Trans. Veh. Technol. 2020, 69, 302–316. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Im, N.; Zhang, G.; Zhang, Q. Adaptive fuzzy tracking control for underactuated surface vessels with unmodeled dynamics and input saturation. ISA Trans. 2020, 103, 52–62. [Google Scholar] [CrossRef] [PubMed]
- Xiaodong, S.; Qinglei, H.; Yang, S.; Boyan, J. Fault-Tolerant Prescribed Performance Attitude Tracking Control for Spacecraft Under Input Saturation. IEEE Trans. Control Syst. Technol. 2020, 28, 574–582. [Google Scholar] [CrossRef]
- Rodrigues, V.H.P.; Hsu, L.; Oliveira, T.R.; Fridman, L. Adaptive sliding mode control with guaranteed performance based on monitoring and barrier functions. Int. J. Adapt. Control Signal Process. 2022, 36, 1252–1271. [Google Scholar] [CrossRef]
- Li, L.; Dong, K.; Guo, G. Trajectory tracking control of underactuated surface vessel with full state constraints. Asian J. Control. 2021, 23, 1762–1771. [Google Scholar] [CrossRef]
- Alvaro-Mendoza, E.; Gonzalez-Garcia, A.; Castaneda, H.; De Leon-Morales, J. Novel adaptive law for super-twisting controller: USV tracking control under disturbances. ISA Trans. 2023, 139, 561–573. [Google Scholar] [CrossRef]
- Fan, Y.; Qiu, B.; Liu, L.; Yang, Y. Global fixed-time trajectory tracking control of underactuated USV based on fixed-time extended state observer. ISA Trans. 2023, 132, 267–277. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.X.; Ding, Y.; Tahsin, T.; Atilla, I. Adaptive neural network and extended state observer-based non-singular terminal sliding mode tracking control for an underactuated USV with unknown uncertainties. Appl. Ocean Res. 2023, 135, 103560. [Google Scholar] [CrossRef]
- Lv, C.; Yu, H.; Chen, J.; Zhao, N.; Chi, J. Trajectory tracking control for unmanned surface vessel with input saturation and disturbances via robust state error IDA-PBC approach. J. Frankl. Inst. 2022, 359, 1899–1924. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.; McNinch, L.; Soltan, R. Sliding-Mode Tracking Control of Surface Vessels. Ind. Electron. IEEE Trans. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Zhang, L.; Zheng, Y.; Huang, B.; Su, Y. Finite-time trajectory tracking control for under-actuated unmanned surface vessels with saturation constraint. Ocean Eng. 2022, 249, 110745. [Google Scholar] [CrossRef]
- Lamraoui, H.C.; Qidan, Z.; Bouzid, Y. Improved active disturbance rejecter control for trajectory tracking of unmanned surface vessel. Mar. Syst. Ocean Technol. 2022, 17, 18–26. [Google Scholar] [CrossRef]
- Yao, Q.; Jahanshahi, H.; Liu, C.; Alotaibi, A.; Alsubaie, H. Disturbance Attenuation Trajectory Tracking Control of Unmanned Surface Vessel Subject to Measurement Biases. Axioms 2023, 12, 361. [Google Scholar] [CrossRef]
- Shan, Q.; Wang, X.; Li, T.; Chen, C.L.P. Finite-time control for USV path tracking under input saturation with random disturbances. Appl. Ocean Res. 2023, 138, 103628. [Google Scholar] [CrossRef]
- Mousavi, S.H.; Khayatian, A. Dead Zone Model Based Adaptive Backstepping Control for a Class of Uncertain Saturated Systems. IFAC Proc. Vol. 2011, 44, 14489–14494. [Google Scholar] [CrossRef]
- Sun, R.; Na, J.; Zhu, B. Robust approximation-free prescribed performance control for nonlinear systems and its application. Int. J. Syst. Sci. 2018, 49, 511–522. [Google Scholar] [CrossRef]
- Ding, Z.; Wang, H.; Sun, Y.; Qin, H. Adaptive prescribed performance second-order sliding mode tracking control of autonomous underwater vehicle using neural network-based disturbance observer. Ocean Eng. 2022, 260, 111939. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems. Automatica 2014, 50, 1217–1226. [Google Scholar] [CrossRef]
- Hsu, L.; Oliveira, T.R.; Cunha, J.P.V.S.d.; Yan, L. Adaptive unit vector control of multivariable systems using monitoring functions. Int. J. Robust Nonlinear Control 2018, 29, 583–600. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Scheme | Steady-State Error | |||
|---|---|---|---|---|
| Proposed method | 0.0031 | 0.0032 | 0.0025 | 0.0026 |
| ASMC | 0.0035 | 0.0037 | 0.0031 | 0.0032 |
| PID | 0.0040 | 0.0040 | 0.0027 | 0.0031 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Y.; Zhang, L.; Ying, Y.; Li, S.; Tang, Y. Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances. J. Mar. Sci. Eng. 2023, 11, 1717. https://doi.org/10.3390/jmse11091717
Ren Y, Zhang L, Ying Y, Li S, Tang Y. Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances. Journal of Marine Science and Engineering. 2023; 11(9):1717. https://doi.org/10.3390/jmse11091717
Chicago/Turabian StyleRen, Yi, Lei Zhang, Yanqing Ying, Shuyuan Li, and Yueqi Tang. 2023. "Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances" Journal of Marine Science and Engineering 11, no. 9: 1717. https://doi.org/10.3390/jmse11091717
APA StyleRen, Y., Zhang, L., Ying, Y., Li, S., & Tang, Y. (2023). Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances. Journal of Marine Science and Engineering, 11(9), 1717. https://doi.org/10.3390/jmse11091717