1. Introduction
With the increasing degree of globalization and the ever-growing energy shortage problem, the Arctic region harbors paramount developmental significance [
1]. The Arctic region has a transcontinental route linking Asia and Europe, and it contains a large amount of untapped resources [
2]. However, numerous natural obstacles, such as floating ice, layer ice, and ridges, as well as extreme environmental conditions, pose a serious threat to the safety of polar navigation. Therefore, safety assessments of structures such as icebreakers, commercial vessels, and submarines that navigate in the Arctic region are particularly important [
3]. Current researches mainly focuses on traditional surface vessels, such as icebreakers and commercial vessels, with limited research on submarines.
The dynamic response during ship-ice interaction process is affected by the shape of the ship, structural strength, and ice properties [
4]. Analytical methods that are conventional have difficulty comprehensively considering multiple factors. Therefore, researchers commonly use empirical equation methods, simulation methods, and experimental methods. The experimental method can be divided into full-scale ship tests and model tests, which yield more accurate results but are costly and time consuming. Empirical equations are derived from the summary and integration of data from considerable of tests, and often apply only to a certain type of operating condition. A relatively lower cost is associated with the simulation method, rendering it applicable to a majority of operational conditions [
5].
In the early nineteenth century, experimental methods were primarily employed for the accumulation of a significant volume of crucial data, from which empirical equations were derived. The earliest ice resistance equation, presented by Runeberg [
6], took into consideration the influences of frictional forces and bow trim angles. Ship design parameters were initially considered by Shimanskii [
7], while Kashteljan [
8] pioneered the partitioning of ice resistance into breaking resistance, overturning and submergence resistance, and damaged floating ice resistance. Jones [
9] introduced semi-empirical methods into the study of continuous ice breaking. Based on the aforementioned research and the accumulation of a substantial amount of data, numerous empirical equations with notable effectiveness were developed. For level ice conditions, methods such as the Lindqvist [
10] approach, which incorporated considerations of friction and ship hull geometry, as well as the Riska [
11] method derived from the modified Lindqvist approach, had been established. Conversely, for floating ice conditions, the relevant empirical equations were predominantly compiled and summarized from experimental data. Examples include the Bronnikov method [
12] based on ship tests and the Mellor method based on the Mohr-Coulomb failure criterion [
13].
In the experimental aspect, Daley [
14] conducted observations on the failure process of the ice layer through full-scale and model-scale experiments and proposed a contact model for the ice layer’s edge. Jeong [
15] conducted ice tank experiments with square-shaped floating ice in three different channel widths and analyzed the impact of ice size on resistance, while proposing a rapid method for calculating ice concentration. Kim [
16] conducted model-scale ice resistance experiments in a simulated ice environment using triangular ice elements made of paraffin instead of real ice. Several operating conditions were set based on different velocities, ice concentration, and ship hull waterline entry angles. The experimental results were compared with numerical simulation results. Jeong [
17] and others conducted model-scale ship tests in a frozen ice region at the MOERI ice tank, resulting in the prediction of planar ice resistance for various thicknesses and bending strengths.
With the advancement of computer technology and numerical simulation methods, researchers have begun to employ simulation techniques to study the physical processes and mechanical characteristics of ice collisions. Among these, FEM, SPH, DEM, and their combined usage are the most common research approaches employed today.
The application of the FEM to simulate ice loads was pioneered by Määttänen and Hoikkanen in 1990, while Evgin et al. subsequently successfully utilized the DEM for icebreaking simulations [
18]. Munjiza [
19] proposed the FEM-DEM method, which integrated the advantages of both approaches, using FEM to simulate ice fracture and DEM to simulate ice accumulation. Huang et al. [
20] based on the combination of CFD and DEM methods, investigated fragmented ice channels and discovered a linear relationship between the thickness and diameter of floating ice and ice resistance. Based on the ice shell collision mechanism and fundamental icebreaking characteristics, Karl [
21] introduced a simplified numerical model to predict the ice impact forces acting on the vessel under horizontal ice conditions. The model addresses two critical failure modes, namely local crushing and flexural fracture. Andrei [
22] constructed a CFD numerical model based on the DEM-BEM theory, suitable for simulating the interaction between floating structures and fragmented ice. The potential flow theory was employed to predict the flow field around the ship hull and the surrounding fragmented ice. Finally, the computational results were compared with the ice tank test results.
Zhang [
23] performed numerical simulations of the collision between a vertical cylindrical structure and layered ice by utilizing LS-DYNA finite element software. Two different thicknesses of cohesive element ice models were constructed, and the S-ALE fluid–structure coupling method was employed. Song, Kim, and others [
24] utilized the ALE method within the LS-DYNA finite element software to simulate the mutual interaction between floating ice and marine structures. They accounted for the fluid–structure interaction problem and validated the correctness of the ALE method and the coupling algorithm in the interaction between fluid, ice, and structures.
Apart from those, Su [
25] incorporated numerical models to investigate the overall and local ice loads on ship structures. Through two case studies, simulated ice loads on the vessel were examined, analyzing ship performance, statistical framework loads induced by ice, and the spatial distribution of ice loads around the ship. A comparison with field measurements was conducted as well. Chai [
26] applied probability methods and models to seek the correlation between ice-induced load statistics and major ice conditions in the field of ship and ocean engineering. Zhao [
27] performed the probability-based fatigue damage assessment of vessels traversing horizontal ice fields. A novel procedure utilizing numerical simulation had been developed for the evaluation of fatigue damage, and the process was demonstrated through a hypothetical scenario involving the icebreaking vessel Snow Dragon 2. The sensitivity of the procedure to key analysis parameters, such as sample size and initial crack size, was also taken into consideration by Zhao [
28]. The impact of low temperature on the computational results was analyzed as well.
The icebreaking research mentioned above primarily focuses on surface vessels, with limited experimental studies and insufficient available data conducted on submarines, thus few related empirical equations have been proposed for the ice resistance of submarines. However, they may encounter collisions with small-scale floating ice when they need to surface during certain special emergency tasks. This paper aims to investigate the dynamic response of submarines navigating through the surface of floating ice-field using the FEM-ALE coupling approach. The effects of navigation speed, ice thickness, and floating ice size on the polar navigation safety of submarines are studied. Special emphasis is placed on the ice resistance force-time history, as well as the stress–strain distribution on both the surface and interior of the structures, to propose a reference condition for safe navigation. The novelty of this study lies in the fact that the submarines are not modeled as empty shells, but as fully integrated bow structures with internal plates, frames, and trusses. Based on the numerical results, critical conditions and empirical equations are proposed.
2. Theoretical Background
2.1. The Theory of Ship-Ice Interaction
The collision between ships and ice involves a significant amount of non-linear behaviors, such as material non-linearity, geometric non-linearity, and contact non-linearity. Material non-linearity refers to the complex stress–strain relationship of sea ice material, which is influenced by multiple factors. Geometric non-linearity refers to the large deformation of sea ice, which is not suitable for the small deformation principle. Contact non-linearity refers to the unstable contact between two substances, resulting in a large number of non-linear changes. In this work, comprehensive consideration is given to the three non-linearities, where both the sea ice and structure are simplified as elastic-plastic materials, and the contact is computed using an automatic face-to-face contact algorithm. In terms of the algorithm, the simulation calculation of the ship collision process essentially involves the numerical solution of collision equations, which is accomplished using the explicit central difference method [
29].
When the results of 0, …,
, time steps are known:
where:
—external force vector;
—internal force vector;
, Nodal element internal force;
—hourglass resistance.
Inverting the equation, it can get:
According to the definition of finite difference method, the displacement, velocity, and acceleration at time
can be solved by the following equation:
where:
,
.
After a series of calculations, the mass influence coefficients are transformed into a diagonal matrix, achieve decoupling, and enable independent computations. In this calculation process, the influence of the stiffness matrix is assumed to be neglected, and only the central single-point integration is considered, significantly reducing the computational steps and decreasing computation time.
2.2. The Material Model
Sea ice is a typical nonlinear material whose physical properties are influenced by various factors, including load strain, temperature, ice age, and salinity. Describing the constitutive model of sea ice accurately in simulation calculations is challenging, and existing research often replaces sea ice materials with ice load models.
At present, there is no perfect ice material model due to the complex physical properties and microstructure of ice. Based on experimental and simulation results, researcher [
30] have proposed several reliable ice load models, including elasto-plastic models based on plasticity theory, viscoplastic models, improved models, anisotropic failure models, and visco-elastic-plastic models based on the particle flow theory of sea ice, as well as crushable foam models.
For the elastic-plastic model [
31], it is assumed that the material undergoes only elastic deformation when the stress is relatively low. However, when the stress exceeds the yield stress, the stress–strain curve deviates from the elastic stage and becomes a sloping line. Once the yield stage is reached, the material starts exhibiting irreversible plastic deformation, and as the stress continues to increase, the material may fail and undergo damage.
Based on the existing experiments, the stress-strain curve of ice floe is shown in red line in
Figure 1. However, elastoplastic models are often used instead of actual ice floes in the simulation of structure-ice interaction. The curve is approximated as two straight lines, the former part is the elastic stage, and the latter part is the plastic stage. The failure modes of sea ice can be simplified into four types: local fragmentation caused by compression failure, instability caused by buckling failure, cracks generated by shear failure, and fractures caused by bending failure. This study focuses on maximum floating ice sizes of only 6 m × 6 m, which are relatively small and rarely experience the latter three failure modes. Typically, only compression failure occurs, specifically in the parts directly in contact with the structure. In this work, the elastic-plastic model is utilized, which effectively captures most properties of the floating ice and enables failure simulation through mesh removal.
2.3. FEM-ALE Coupling Method
Finite element method includes Lagrangian, Eulerian, and ALE methods [
32]. In the Lagrangian method, element points are identical to material points, and the element is fixed to the object, moving along with the model nodes. In the Eulerian method, element points are spatial points, and the element is fixed in space, unaffected by the movement of material points. In the ALE description, a reference configuration independent of the actual and initial configurations is introduced, with element points as reference points. The motion of the element in space is arbitrary, independent of the Lagrangian and Eulerian coordinate systems, and can be chosen as needed. When the element motion velocity is reasonable, this method can accurately simulate object deformation and track object motion, making it suitable for modeling nonlinear and large deformation changes, particularly in fluid domains. As shown in
Figure 2, A, B and C are grid movements of Lagrangian, Euler, and ALE methods respectively.
In the traditional Eulerian conservation equations, the conventional terms have been replaced by relative velocity yielding the conservation equations in an arbitrary Lagrangian form, as expressed below [
33]:
Mass conservation equation:
Momentum conservation equation:
Energy conservation equation:
Internal energy conservation equation:
At each computational instant, two distinct stages are encompassed. In the first stage, material does not flow across the boundaries of the grid, and there is no material overflow throughout the entire calculation process, ensuring mass conservation. In the second stage, material flows across the edges of the elements, referred to as convection. The ALE method computes the transport quantities, internal energy, and momentum of the various physical properties as the material passes through the element boundaries. Unlike the first stage of the Lagrangian method, the second stage involves the generation of an independent motion in the grid, separate from the material. The grid’s independent relative motion allows it to return to its original position or any other position that facilitates more accurate calculations. ALE does not support implicit time integration, dynamic relaxation, and contact. However, large deformation motion can be well described by ALE, which is applicable for fluid–structure interaction in fluid dynamics.
The main models in this work includes the submarine, floating ice, and fluid domains, with defined contacts between floating ice and the submarine, and coupling between each model and the fluid domain. Both floating ice and structures use an elastoplastic material model, representing contact between structures and floating ice as contact between elastic bodies. A penalty function algorithm is employed for contact, which checks if nodes penetrate the master surface at each time step and applies a large interface contact force at the penetrated locations. The magnitude of this force is proportional to the penetration depth and the stiffness of the master surface, ensuring high efficiency and applicability.
The collision between the ship and ice in this work is highly complex and involves erosion double-sided contact, where the structure and floating ice act as master and slave surfaces, respectively [
34]. The fluid–structure interaction utilizes a penalty function algorithm, and the ALE moving mesh method is employed to calculate fluid motion. Due to the LS-DYNA explicit integration scheme utilizing the central difference method, the accuracy of calculations is affected by the hourglass deformation of quadrilateral meshes. For fluids, hourglass control based on a viscous equation is applied to suppress hourglass deformation, while for solids, hourglass control based on a stiffness equation is used to counteract hourglass deformation by deforming in the opposite direction.
2.4. Colbourne Method
The maximum ice resistance is often employed for evaluating structural strength, whereas the average ice resistance is generally utilized for calculating economic benefits. The validation of the maximum ice resistance results is carried out in this work. The Colbourne method [
35], which treats the ice resistance as a unified entity by disregarding infrequent ice fracture occurrences, is adopted to validate the predicted maximum ice resistance based on the numerical simulation. This approximation aligns with the simulation settings in the computational software. According to Colbourne method the total resistance is divided into open water resistance and ice resistance, as expressed by the following equation:
where:
—the open water resistance coefficient,
—the drag coefficient of ice floe,
—the density of ice,
—the ice thickness,
—the acceleration of gravity,
—the ship speed,
—the concentration of ice floe.
The drag coefficient of floating ice is a dimensionless value, defined as follows:
where:
B—maximum beam for the structure
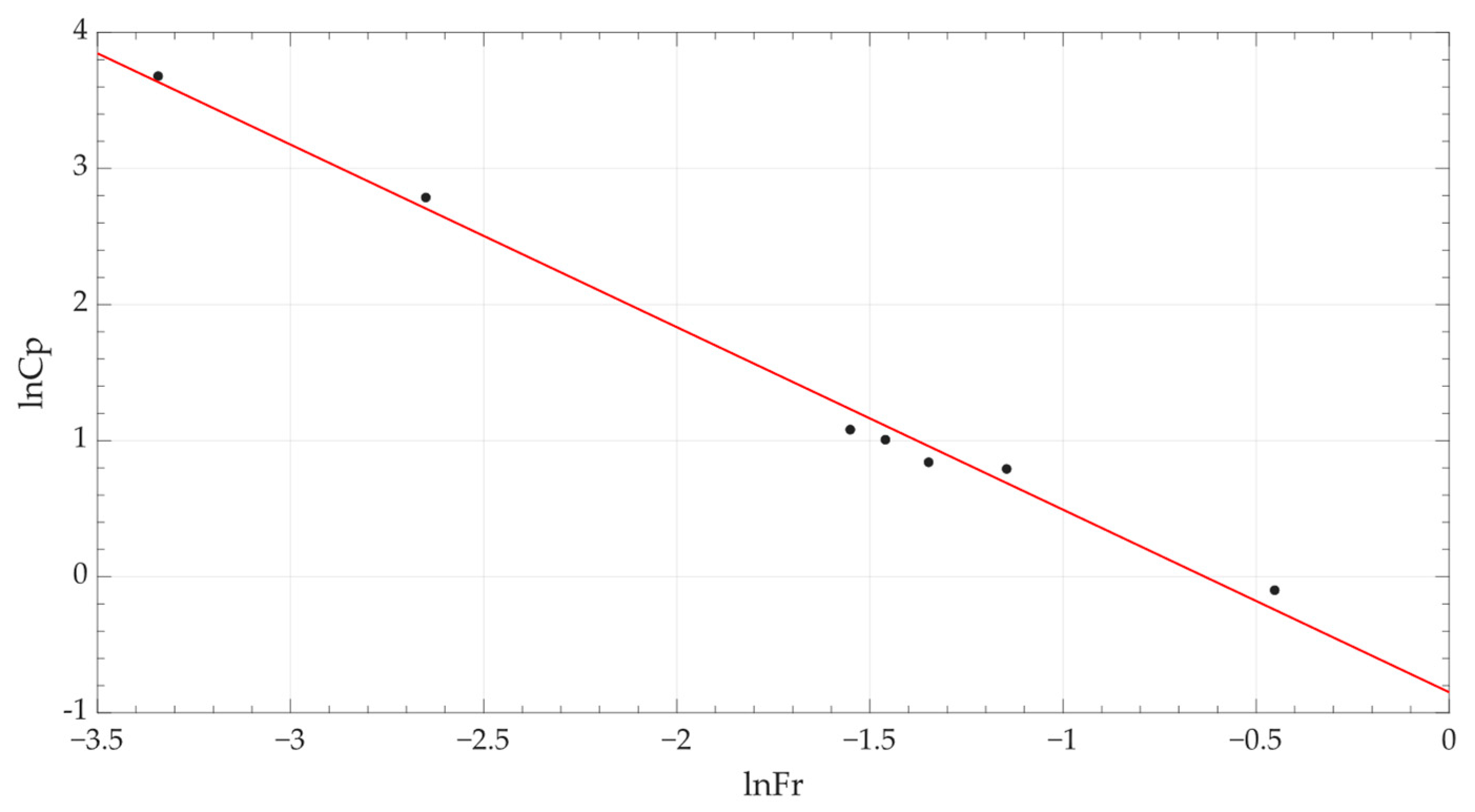
Similarly, the non-dimensionalization of navigation speed is also performed in the Colbourne method. It is considered that the Froude number is related to the ice concentration. The ice Froude number is defined as follows:
Based on the Colbourne method, it is considered that there exists a linear relationship between the natural logarithm of Cp and the natural logarithm of Frp. However, in the case of this study, the structure is unique and lacks relevant experimental data for validation. Therefore, utilizing multiple simulated data obtained from our own simulations, the natural logarithm of Cp and the natural logarithm of Frp are calculated, and a corresponding curve can be plotted. The study aims to evaluate the accuracy by inversely verifying the error in the resistance results based on this curve.
5. Conclusions
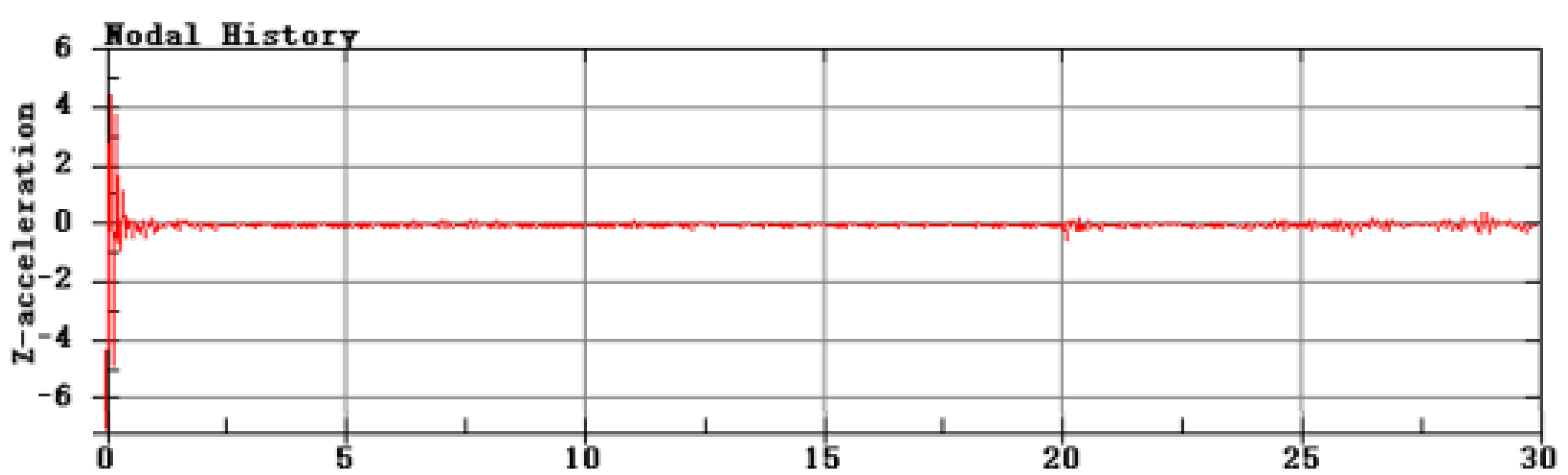
In this work, the dynamic response of submarines navigating in floating ice field was conducted based on the FEM-ALE coupled method. Different from traditional icebreakers, the submarine almost only collides with the first ice floe, and the remaining floes are pushed aside without accumulating. The collision is a continuous loading–unloading process, and its frequency is negatively correlated with the three working condition factors. The intensity of dynamic response of the submarine is generally positively correlated with the three working condition factors, but it is locally influenced by the relative position of the collision. All three working condition factors affect the degree of ice floe flipping, thereby influencing the relative collision position.
In this work, plastic deformation of the structure only occurred under the conditions of an ice thickness of 1.2 m, floating ice size of 6 m by 6 m, and navigation speeds of 6 knots and 4 knots. Therefore, it is recommended that the structure should try to avoid more severe conditions than an ice thickness of 1.2 m, a floating ice size of 6 m by 6 m, and a navigation speed of 4 knots when navigating on floating ice field. Based on the simulation results in this paper, an updated ice resistance method was developed by introducing the floating ice size to the Colbourne method, which was validated using a 5 m × 5 m condition.
Due to the extensive computational time required for each scenario in this study, the mechanism of the impact of floating ice flipping on collisions was not quantitatively investigated. The critical working conditions currently proposed are estimated values that require further refinement into more accurate values through additional research. The empirical equation improvement scheme presented in this paper, based on simulation results, needs to be validated through model tests.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}