1. Introduction
It is difficult for the traditional methods and catch-and-catch methods to meet the actual needs of field operations with the development of the aquaculture industry, particularly with the emergence of large-scale deep-water cages, deep-sea farming boats, and other fish farming models [
1]. Therefore, achieving the mechanization and automation of fish captures as well as guaranteeing the catch’s survival and non-damage rate is an important topic in the research field of fishery catch equipment [
2]. The fish pump is becoming a research hot spot for many domestic scholars as a key piece of equipment to improve the mechanization level of aquaculture. There are various forms of fish pumps, including vacuum pumps, centrifugal impeller pumps, jet pumps, etc. In-depth research has been conducted, and the design and research process of the fish pump has been focused on protecting the fish body from harm, increasing the fish body’s survival rate, and increasing the fishing efficiency [
3].
The design and development of the fish pump needs to focus on solving the problems of lossless fish body transmission, enhancing adaptability, improving intelligence levels, and establishing continuous fishing systems for pelagic fisheries. Tian Changfeng [
4], based on the structural characteristics of single-channel pumps, summarized the design methods of single-channel pumps through a large number of experimental studies and design practices and analyzed the structure of single-channel pump impellers and the reasons for their excellent non-clogging performance. They then proposed a new method for improving the hydraulic design of single-channel pumps. Summerfelt [
5] used 3D design software to make a solid model of the fish pump and presented the local details, which laid the foundation for the subsequent design and manufacture of the fish pump. Chu Shupo [
6] explored the effect of the volute structure on the performance of the fish pump, studied the characteristics of the pump’s internal flow field, and analyzed the effect of the control law of the vacuum outlet form on its performance. Ding Ziyang [
7] and Zhang Liang [
8] analyzed the pressure and velocity distribution inside the fish as well as the trajectory of the trace in the pump. Numerous scholars have also conducted extensive research on the analysis of the hydrodynamic characteristics of structures. Dutta [
9] used the open-source computational fluid dynamics (CFD) modeling tool REEF3D to simulate the oscillatory flow, and the CFD model solves the Reynolds–Averaged Navier–Stokes (RANS) equations in all three dimensions. Further analysis was conducted using CFD to study the effect of blockage ratio on the hydrodynamic characteristics of different oscillatory flow regimes. Dutta [
10] used three-dimensional simulations to investigate scour in combined wave-current flows around rectangular piles with various aspect ratios. The simulation model solved the RANS equations using the k–ω turbulence model and included the Exner equation to compute bed elevation changes. The model also used the level-set approach to accurately capture the free surface and included a hydrodynamic module with a morphological module to simulate the scour process.
The currently used fish pump has problems such as a high fish body damage rate, low efficiency, a bulky body, and high energy consumption. This paper aims at improving the hydrodynamic performance of the vacuum fish pump. CFD analysis entails performing fluid simulation analysis on the vacuum pump body and flow channel structure as well as conducting research on the working conditions of fish suction and analyzing the flow field, pressure, speed, and numerical simulation parameters in the flow channel. The dependent variables include the hydrodynamic performance of the fish pump and the influence of fish body damage, the inlet flow velocity of the fish pump, the negative pressure of the pipeline, and the impact force of the water flow on the inner wall of the tank. The independent variables include the working environment of the pump body and the fish pump. The structural form of the fish pump with the optimum performance is obtained using the multi-objective optimization of the fish pump based on the particle swarm optimization algorithm.
2. Overview of Design Scheme
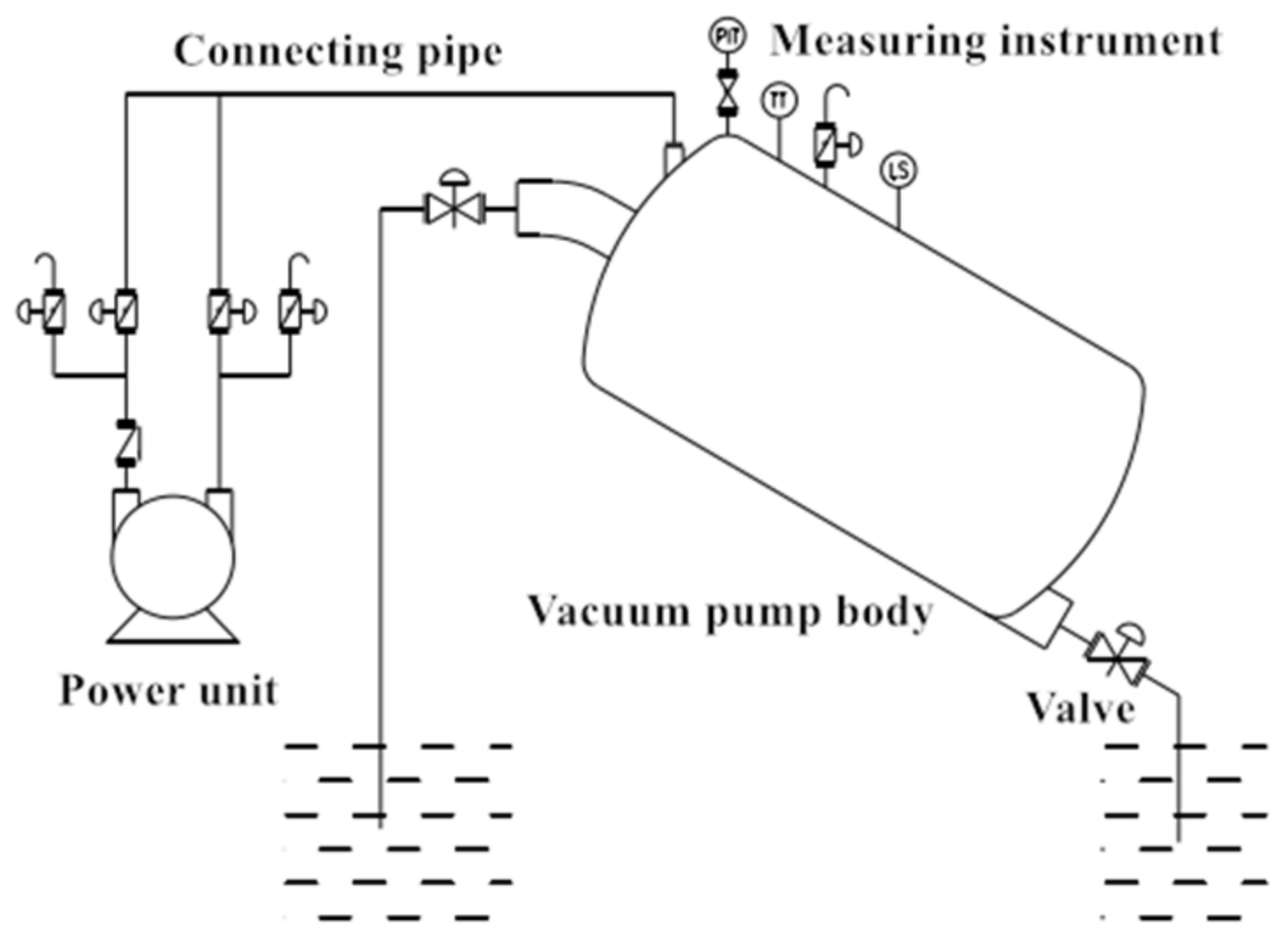
Taking a vacuum fish pump as the research object,
Figure 1 depicts the specific structure of this type of vacuum fish pump. The structure of the vacuum fish pump is mainly composed of a power unit, a vacuum pump body, and connecting pipes. The vacuum pump body is the basic unit of the fish-sucking pump structure, and it causes less harm to the fish body when sucking fish [
11]. The fluid simulation analysis of the vacuum pump body and the flow channel structure is conducted using the standard turbulent flow model and the Euler multiphase flow method. Additionally, the fish suction working condition is studied, and the flow field, pressure, velocity, and numerical simulation parameters in the flow channel are analyzed. Taking the impact on the hydrodynamic performance of the vacuum fish pump, the inlet flow rate of the fish pump, the negative pressure of the pipeline, and the impact force of the water flow on the inner wall of the tank as the dependent variables, the tank volume, the diameter of the water inlet, and the exhaust speed are selected. The diameter of the mouth, the height, and the angle of the pump body are taken as independent variables, and the multi-objective optimization of the fish pump based on the particle swarm algorithm is used to analyze and obtain the optimal structure of the fish pump.
3. Basis of Theoretical Analysis
In this paper, we use the commercial computational fluid dynamics software ANSYS fluent for finite element (FEM) analysis and calculation. The Eulerian multiphase model in ANSYS Fluent allows for the modeling of multiple separate yet interconnected phases. The phases can be liquids, gases, or solids in nearly any combination. In contrast to the discrete phase model, each phase receives a Eulerian treatment. The number of secondary phases in the Eulerian multiphase model is exclusively limited by memory needs and convergence behavior. As long as sufficient memory is available, any number of secondary phases can be modeled.
3.1. Volume Fraction Equation
The description of multiphase flow as interpenetrating continua incorporates the concept of phasic volume fractions, denoted here by
. Volume fractions represent the space occupied by each phase, and the laws of conservation of mass and momentum are satisfied by each phase individually. The derivation of the conservation equations can be executed by ensemble averaging the local instantaneous balance for each of the phases or by using the mixture theory approach. The volume of phase
,
is defined by:
where:
The effective density of the phase
is:
where
is the physical density of phase
,
is the volume fraction of phase
.
The volume fraction equation may be solved either through implicit or explicit time discretization.
3.2. Conservation Equations
This section presents the general conservation equations from which the equations are derived, followed by the solved equations.
3.2.1. Conservation of Mass
The continuity equation for phase
is:
where
is the velocity of phase
and
characterizes the mass transfer from the
to
phase, and
characterizes the mass transfer from phase
to phase
, and you are able to specify these mechanisms separately.
By default, the source term on the right-hand side of Equation (4) is zero, but it can specify a constant or user-defined mass source for each phase. A similar term appears in the momentum and enthalpy equations.
3.2.2. Conservation of Momentum
The momentum balance for phase
yields:
where
is the
phase stress-strain tensor,
is the interphase velocity,
is the acceleration due to gravity,
is an external body force,
is a lift force,
is a wall lubrication force,
is a virtual mass force, and
is a turbulent dispersion force.
is an interaction force between phases, and
is the pressure shared by all phases.
3.3. Equations Solved by ANSYS Fluent
The equations for fluid-fluid and granular multiphase flows, as solved by ANSYS fluent, are presented here for the general case of an n-phase flow.
3.3.1. Continuity Equation
The volume fraction of each phase is calculated from a continuity equation:
where
is the phase reference density, or the volume averaged density of the
phase in the solution domains. The solution of this equation for each secondary phase, along with the condition that the volume fractions sum to one allows for the calculation of the primary-phase volume fraction.
3.3.2. Fluid-Fluid Momentum Equations
The conservation of momentum for a fluid phase
is:
Here is the acceleration due to gravity and is the phase stress-strain tensor, is an external body force, is a lift force, is a wall lubrication force, is a virtual mass force, and is a turbulent dispersion force. is an interaction force between phases, and is the pressure shared by all phases, is the momentum exchange coefficient between phase and phase .
3.4. Approximate Model Optimization Design Method
The Kriging model, second-order response surface methodology (RSM) model, and radial basis Function (RBF) model are used to develop the surrogate model of the structural parameters of the vacuum fish pump and the impact force on the bottom and two sides of the tank body. The RBF model requires plenty of sample points since the prediction accuracy and robustness of the second order RSM model are very poor for highly nonlinear problems [
12]. Furthermore, the optimization problem of a vacuum fish pump is often highly nonlinear, and the number of sample points is very limited; thus, it is necessary or even required to use a surrogate model that satisfies all these requirements [
13]. Although the Kriging model lacks transparency, its prediction accuracy and robustness are not affected by changes in sample scale; hence, it was chosen to develop the surrogate model.
3.4.1. Kriging Model
The Kriging model is an unbiased estimation model with the smallest estimated variance. It can be based on the dynamic structure of known data samples, fully consider the relevant characteristics of variables within the value range and analyze the trends and dynamics of known data samples. A good fit for nonlinear problems between the response variable and the design variable [
14,
15]. The Kriging model includes both regression and a nonparametric part.
Among them:
is the training sample given by the approximate model;
is the regression model determined by the known function group about
, which can be expressed as:
is the regression coefficient;
is the basis function determined in advance;
n is the number of sample points of the training sample.
is a random process with a mean of 0 and a variance of
, and the covariance between two interpolation points is:
where:
is the variance of the random process;
is a symmetric positive definite diagonal matrix of order
n x n;
is the spatial correlation function of any two sampling points
and,
among the
k sample points.
3.4.2. Second-Order RSM Model
The response surface method is based on the design of experiments, and it uses a specific display function to establish the relationship between the response parameter and the variable. The polynomial model can be used to simulate the real functional relationship in a relatively small area, thus simplifying the complex model [
16]. In the actual application process, because there are one or more inflection points in the polynomial response surface approximation model of degree 3 or above that will interfere with the prediction results, the second-order polynomial response surface model is often used in engineering applications, and its function expression is [
17]:
Among them, the coefficients are calculated by the least square method:
3.4.3. RBF Model
The radial basis function surrogate model is formed from a series of functions developed by the same method through linear weighted superposition [
18], which is characterized by good flexibility, simple structure, and less calculation. The mathematical expression of the radial basis function model is:
Among them, is the basis function, and the prediction accuracy obtained by different basis functions is different; is the weight coefficient.
3.5. NSGA-II Model
The vacuum fish pump optimization is a multi-objective optimization and multi-attribute decision-making problem. In terms of vacuum fish pump design, the requirements for change in total pressure inside the tank body and change in flow rate at the inlet conflict with each other. The inherent parallel mechanism and global optimization characteristics of genetic algorithms have attracted the interest of researchers in the field of multi-objective optimization. In 1993, Srinivas and Deb proposed a non-dominated sorting genetic algorithm, which has since been widely used in solving numerous problems. However, NSGA has many shortcomings, which make it difficult to obtain satisfactory results when dealing with high-dimensional, multimodal, and other problems. In 2000, Deb made improvements to NSGA and obtained the NSGA-II Algorithm, which further improved the computational speed and robustness of the algorithm. Therefore, the NSGA-II algorithm is used to optimize the structure of a vacuum fish pump.
The basic flow of the NSGA-II algorithm is as follows [
19]:
(1) Set the current evolutionary generation , randomly initialize the t-th generation population, sort all individuals according to the non-domination relationship, and calculate the individual crowding distance.
(2) Select 0.5 N from using the two-way league method to perform crossover and mutation operations on individuals to generate a preserved population.
(3) Merge populations and to obtain merged population , and perform non-dominated sorting on all individuals in population , and calculate the individual crowding distance.
(4) Select N individuals from according to the sorting results to generate a new population .
(5) Judge the relationship between t and . If _max, then output , if , the algorithm returns to step (2) for cyclic execution.
4. Prototype Experiment
In order to validate the actual working performance of the design model of the vacuum fish pump, a solid prototype of the fish pump was made at a ratio of 1:1, and several field tests of the prototype were conducted in an aquaculture fish tank. The test plan and the test instruments used are shown in
Figure 2 below. An electromagnetic flow meter and a pressure gauge are installed near the upper part of the water inlet of the vacuum fish pump to measure the actual flow and pressure of the water inlet. The lifting platform installed at the bottom and the crane changed the suction height and angle of the fish pump for multiple tests.
The main design parameters of the vacuum fish pump are shown in
Table 1.
The data obtained from the test are shown in
Table 2 below. According to the test results, the water suction height and angle of the vacuum fish pump will directly affect the negative pressure and water absorption performance of the fish pump, and according to experience, the main body of the fish pump. The structure will also have a great impact on its working performance [
20]. Therefore, a number of parameters that have a greater impact on the fish pump (water absorption height, angle, volume of the pump body, diameter of the water inlet, and diameter of the exhaust port) were selected as self-contained parameters below. As independent variables, consider the flow velocity at the water inlet, the negative pressure value, the impact force of the inner wall of the tank, etc. Additionally, the Latin hypercube sampling method is used to select 167 sets of calculation models, wherein 117 sets of calculation models are selected to develop a Surrogate model, and 50 sets of calculation models are selected to verify the effectiveness of the Kriging model. Finally, multi-objective parameter optimization based on the particle swarm optimization algorithm is used to obtain the optimal structure of the vacuum fish pump.
5. Hydrodynamic Characteristics Analysis and Performance Optimization of Vacuum Fish Pump
5.1. Calculation Instance
5.1.1. The Finite Element Model of the Device
In this paper, we use the commercial computational fluid dynamics software ANSYS FEM analysis and calculation and compute 12 core parallel calculations on a single server. The geometric modeling of the vacuum fish pump is executed using 3D modeling software. Structures such as brackets and flanges are simplified in order to facilitate calculation and simulation. When performing CFD simulation analysis, the SST implicit turbulence model and Euler multiphase flow model are used to set the water inlet of the pump as a pressure inlet and the initial gauge pressure. Set the exhaust port as the mass flow outlet, and set the inner mesh surface of the pump body as the wall boundary.
Table 3 summarizes the fluid domain’s boundary conditions, and
Figure 3 shows the finite element model derived after processing.
The grid division of the computational domain is shown in
Figure 4. The grid is divided into the form of a structured grid. The grid independence test is performed to determine the specific grid size. Three grid sizes of 0.05 m, 0.03 m, and 0.01 m were selected for numerical simulation. By comparing the calculation results of the three grid sizes, it can be seen that the average calculation error of the 0.03 m grid size relative to the 0.01 m grid size is 4.18%. The average calculation error of the 0.05 m grid size relative to the 0.01 mm grid size is 2.64%. Considering the calculation accuracy and calculation time cost, the main grid size is proposed to be 0.01 m, with a 0.002 m grid size selected for local grid refinement at the stress-concentrated parts. The number of grid cells is 85,285.
5.1.2. Calculation Model Reliability Analysis
The negative pressure value of the water inlet of the vacuum pump in the experimental results above is compared with the value obtained by the calculation simulation, as shown in
Figure 5, in order to verify the accuracy and reliability of the CFD calculation model. It can be seen from the figure that the error between the CFD simulation results and the experimental results is 8–12%. The error might be caused by a difference in the layout of the water inlet pipe between the actual experiment and the installation of the measuring instrument. The error is within the acceptable range [
21]. The study findings reveal that the accuracy and reliability of the numerical calculation model have been verified.
5.2. Analysis of Hydrodynamic Characteristics of Fish Pump
The internal flow field characteristics have varied performances at different time points due to the mutual influence between the change of the vacuum degree in the tank of the vacuum fish pump and the negative pressure in the tank, the flow velocity, and the impact force of the tank wall. Therefore, it is necessary to analyze the dynamic change process of the flow state and flow field of the vacuum fish pump under different duration conditions through calculation and simulation [
22]. The simulation model with the same structural parameters, operating height, and angle as the test prototype model is selected for calculation and analysis.
Figure 6,
Figure 7 and
Figure 8 below show the internal flow state, flow field velocity, and pressure distribution cloud diagrams of the vacuum fish pump simulation model in three time periods (1 s, 3 s, and 5 s).
Figure 6,
Figure 7 and
Figure 8 shows that when the vacuum fish pump operates for 1 second, a huge negative pressure is generated at the moment when the tank is exhausted. At this time, the negative pressure value of the suction port is about −24 Kpa in the vacuum tank, while the pressure in the body is about −45 Kpa higher than that of the water inlet. As a result, the water flow at the water inlet enters the tank quickly. The direction of the flow velocity entering the tank is approximately parallel to the wall of the tank body, and the incident water flow has a velocity of about 5.2 m/s. When the vacuum fish pump is set to 4 s, the negative pressure value of the tank body tends to be stable, the water flow velocity at the water inlet gradually decreases to about 3.6 m/s, and the direction of the flow velocity entering the tank body gradually approaches the tank wall surface. When the vacuum fish pump is set to 5 s, the negative pressure value of the tank gradually decreases, as does the uniformity of the pressure value distribution in the water intake pipe, resulting in a drop in water flow velocity at the water inlet to about 2.9 m/s. At this time, the flow state of the water entering the tank is relatively dispersed, and the tail flow of the inlet water produces a secondary backflow during the contact and process with the bottom of the tank.
5.3. Performance Optimization of Fish Pump Based on NSGA-II
From the previous discussion, it can be seen that, there is a mutual influence between the negative pressure value inside the vacuum fish pump, the water inlet flow rate, and the impact force of the tank wall under different time durations. The water inlet flow rate and negative pressure value will be beneficial to the enhancement of the fish lifting ability of the fish pump. However, a high-water inlet flow rate and negative pressure value will cause the direction of the jet flow in the tank to be close to the bottom surface of the tank, which will increase the fish pump’s lifting ability. The impact force of the fish-water mixed flow, when it enters the vacuum fish pump, will cause greater damage to the fish body, and the excessively high-water inlet flow rate will also increase the collision probability of the fish body when it enters the pipeline, also causing damage to the fish body. This results in an increased damage rate. Therefore, it is necessary to optimize the structural parameters of the vacuum fish pump under the premise of ensuring a low fish body damage rate.
An NSGA-II multi-objective parameter optimization was performed using the impact force value of fish body collision, negative pressure value, water inlet flow rate, the impact force of pool bottom and side wall as dependent variables, and exhaust velocity, pump placement angle, the height of exhaust port diameter, and water inlet diameter as independent variables.
First, the Latin hypercube sampling method is used to sample the independent variables.
Table 4 below shows the range of values.
Figure 9 shows part of the data obtained by sampling, and a total of 167 sets of calculation parameters were extracted (Chen Xiaolong, 2020).
Table 5 below shows a subset of the data obtained after sampling the independent variables using the Latin hypercube sampling method. A total of 167 sets of calculation parameters were extracted. The data was then entered into Ansys-Fluent for parameter batch modeling and ultimately into the vacuum fish pump calculation model for solution iterations to obtain the dependent variable’s solution results.
This paper uses RSM, Kriging, and RBF to construct the surrogate model by entering the dependent variable solution results from 167 data sets into the surrogate model. The Kriging algorithm with the highest convergence accuracy is selected by comparing the iterative results of various surrogate models.
Table 6 below shows the comparisons of the root mean square for different surrogate models.
The multi-objective parameter optimization based on NSGA-II is then performed after developing the surrogate model.
Table 7 below shows the final parameter optimization results.
Bring the optimal structural parameters of the vacuum fish pump obtained above into the fluent solver once again, then use post-processing to obtain the internal flow field and flow state distribution diagram of the fish pump with a time duration of 3 s, as shown in
Figure 9 below. The volume fraction distribution, internal velocity distribution, and pressure distribution of the vacuum fish pump optimization model under the condition of 3 s duration are shown in the figure from left to right. It can be clearly seen from the figure that the direction of the incident water flow in the vacuum fish pump tank is close to the upper end of the tank body, which will reduce the speed of the fish-water mixed flow when entering the tank, thereby reducing the collision damage to the fish body. At this time, the water flow velocity at the water inlet is about 2.5 m/s, and the negative pressure value distribution gradient between the tank body and the water inlet pipeline is relatively uniform, which can achieve good fish suction and fish lifting effects.
6. Conclusions
Taking a vacuum fish pump as the research object, the fluid simulation analysis of the tank and channel construction of the vacuum fish pump was carried out using the combination of CFD and NSGA-II, and the effect of vacuum suction was analyzed. The hydrodynamic performance of the fish pump and multiple structural parameter variables of fish damage were optimized, and the following main conclusions were obtained:
(1) Several prototype experiments were carried out to assess the actual working performance of the design model of the vacuum fish pump. The experimental values were compared with the CFD calculation model, which proved the accuracy and reliability of the calculation model.
(2) The dynamic change process of the flow state and flow field of the vacuum fish pump was analyzed under different chronological conditions through calculation and simulation. There is a mutual influence relationship between the impact forces on the tank wall and the internal flow field characteristics, which have different performances at different time points.
(3) The structural parameters of the vacuum fish pump, including exhaust velocity, tank placement angle, height, exhaust port diameter, and water inlet diameter, were selected. The impact force is the dependent variable. Latin hypercube sampling is utilized to sample the independent variable in conjunction with the impact force value of the fish body collision damage, and a multi-objective parameter optimization based on the NSGA-II algorithm is performed. The structural parameters of the vacuum fish pump are optimized under the premise of ensuring the fish body damage rate and the structural parameters of the vacuum fish pump with the optimal hydrodynamic performance under 167 sets of parameter values are obtained, and the optimized parameters are substituted into the solver again. The results show that, under the condition of optimal structural parameters, the direction of the incident water flow in the vacuum fish pump tank is close to the upper end of the tank body, which reduces the speed of the fish-water mixed flow when entering the tank, thereby reducing the fish body collision damage. When the water flow velocity at the water inlet is about 2.5 m/s, the negative pressure value distribution gradient between the tank body and the water inlet pipeline is relatively uniform, allowing for good fish suction and a fish lifting effect.
Author Contributions
Y.H.: Experimental design, Data analysis, Writing and Editing; Y.Z.: Data curation, Participate in experiments; C.Z.: Experimental analysis, Guidance; M.Y.: Analysis of results, Visualization; T.J.: Experimental design guidance, Supervision. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Key R & D Program of China (NO.: 2022YFD2001702).
Data Availability Statement
The author is unable to publish a link to the archived dataset due to data privacy and workplace regulations, and hereby declares.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, X.; Tian, C.; Liu, X.; Huang, Y.; Che, X.; Yang, J.; Hong, Y. Research progress and development suggestions of fish pump. Fish. Mod. 2020, 47, 7–11. [Google Scholar]
- Guo, X.; Tan, X. Analysis of main structure type and application prospect of fish pump. Fish. Inf. Strategy 2013, 28, 214–218. [Google Scholar]
- Barrut, B.; Blancheton, J.P.; Champagne, J.Y.; Grasmick, A. Water delivery capacity of a vacuum airlift-Application to water recycling in aquaculture systems. Aquac. Eng. 2012, 48, 31–39. [Google Scholar] [CrossRef]
- Tian, C.; Chen, X.; Che, X.; Liu, X. Design and experiment of single tank vacuum suction pump in aquaculture pond. Fish. Mod. 2020, 47, 39–44. [Google Scholar]
- Summerfelt, S.T.; Davidson, J.; Wilson, G.; Waldrop, T. Advances in fish harvest technologies for circular tanks. Aquac. Eng. 2018, 40, 62–71. [Google Scholar] [CrossRef]
- Chu, S.; Xu, Z.; Tang, T.; Wang, Z.; Zhan, Z. Vacuum suction pump for far-reaching Marine culture platform. Ship Eng. 2020, 42, 68–71. [Google Scholar]
- Ding, Z.; Xu, L.; Gao, M.; Wang, G. Design and simulation analysis of vacuum fish pump. J. Phys. Conf. Ser. 2021, 2113, 012009. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Q.; Li, X. Waveform Prediction of Blade Tip-Timing Sensor Based on Kriging Model and Static Calibration Data. Math. Probl. Eng. 2023, 2023, 9632212. [Google Scholar] [CrossRef]
- Dutta, D.; Afzal, M.S.; Alhaddad, S. 3D CFD Study of Scour in Combined Wave–Current Flows around Rectangular Piles with Varying Aspect Ratios. Water 2023, 15, 1541. [Google Scholar] [CrossRef]
- Dutta, D.; Bihs, H.; Afzal, M.S. Computational Fluid Dynamics modelling of hydrodynamic characteristics of oscillatory flow past a square cylinder using the level set method. Ocean Eng. 2022, 253, 111211. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, F.; Li, J.; Kang, J.; Liu, C.; Li, N.; Pan, S. Novel efficient energy saving approach for liquid ring vacuum pump in coal mine gas drainage. Process Saf. Environ. Prot. 2023, 171, 926–937. [Google Scholar] [CrossRef]
- Peng, X.; Xu, L.; Gao, J.; Liu, C.; Zhou, J. Reliability analysis of city gas pipelines subjected to surface loads based on the Kriging model. Proceedings of the Institution of Mechanical Engineers, Part O. J. Risk Reliab. 2023, 237, 69–79. [Google Scholar]
- Liu, A.; Li, Z.; Wang, N.; Zhang, Y.; Krankowski, A.; Yuan, H. SHAKING: Adjusted spherical harmonics adding KrigING method for near real-time ionospheric modeling with multi-GNSS observations. Adv. Space Res. 2023, 71, 67–79. [Google Scholar] [CrossRef]
- Oyewola, O.M.; Petinrin, M.O.; Labiran, M.J.; Bello-Ochende, T. Thermodynamic optimisation of solar thermal Brayton cycle models and heat exchangers using particle swarm algorithm. Ain Shams Eng. J. 2023, 14, 101951. [Google Scholar] [CrossRef]
- Safarik, J.; Snasel, V. Acceleration of Particle Swarm Optimization with AVX Instructions. Appl. Sci. 2023, 13, 734. [Google Scholar] [CrossRef]
- Mohammadi, S.; Hejazi, S.R. Using particle swarm optimization and genetic algorithms for optimal control of non-linear fractional-order chaotic system of cancer cells. Math. Comput. Simul. 2023, 206, 538–560. [Google Scholar] [CrossRef]
- Laskin, A.A.; Raykov, A.A.; Burmistrov, A.V.; Salikeev, S.I. Conductance of Channels of a Dry Screw Vacuum Pump in the Molecular Gas Flow Mode. J. Mach. Manuf. Reliab. 2022, 51, 520–524. [Google Scholar] [CrossRef]
- Kumar, P.; Rao, B.; Burman, A.; Kumar, S.; Samui, P. Spatial variation of permeability and consolidation behaviors of soil using ordinary kriging method. Groundw. Sustain. Dev. 2023, 20, 100856. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, Y.; Kang, J.; Zhang, Y.; Meng, F. The effect of discharge areas on the operational performance of a liquid-ring vacuum pump: Numerical simulation and experimental verification. Vacuum 2022, 206, 111425. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, L.; Zhao, X.; Pan, S.; Wang, Z.; Cui, D.; Geng, M. Optimal design and development of two-segment variable-pitch screw rotors for twin-screw vacuum pumps. Vacuum 2022, 203, 111254. [Google Scholar] [CrossRef]
- Burmistrov, A.; Raykov, A.; Isaev, A.; Salikeev, S.; Kapustin, E.; Fomina, M. Efficiency improvement of Roots vacuum pump working process:Computational fluid dynamics methods modeling. Vak. Forsch. Prax. 2022, 34, 32–37. [Google Scholar] [CrossRef]
- Guo, G.; Zhang, R. Experimental study on pressure fluctuation characteristics of gas–liquid flow in liquid ring vacuum pump. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 261. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}