
Physics-Based Modelling for On-Line Condition Monitoring of a Marine Engine System

 , , ,
, , ,  ,
,  and
and
Abstract
1. Introduction
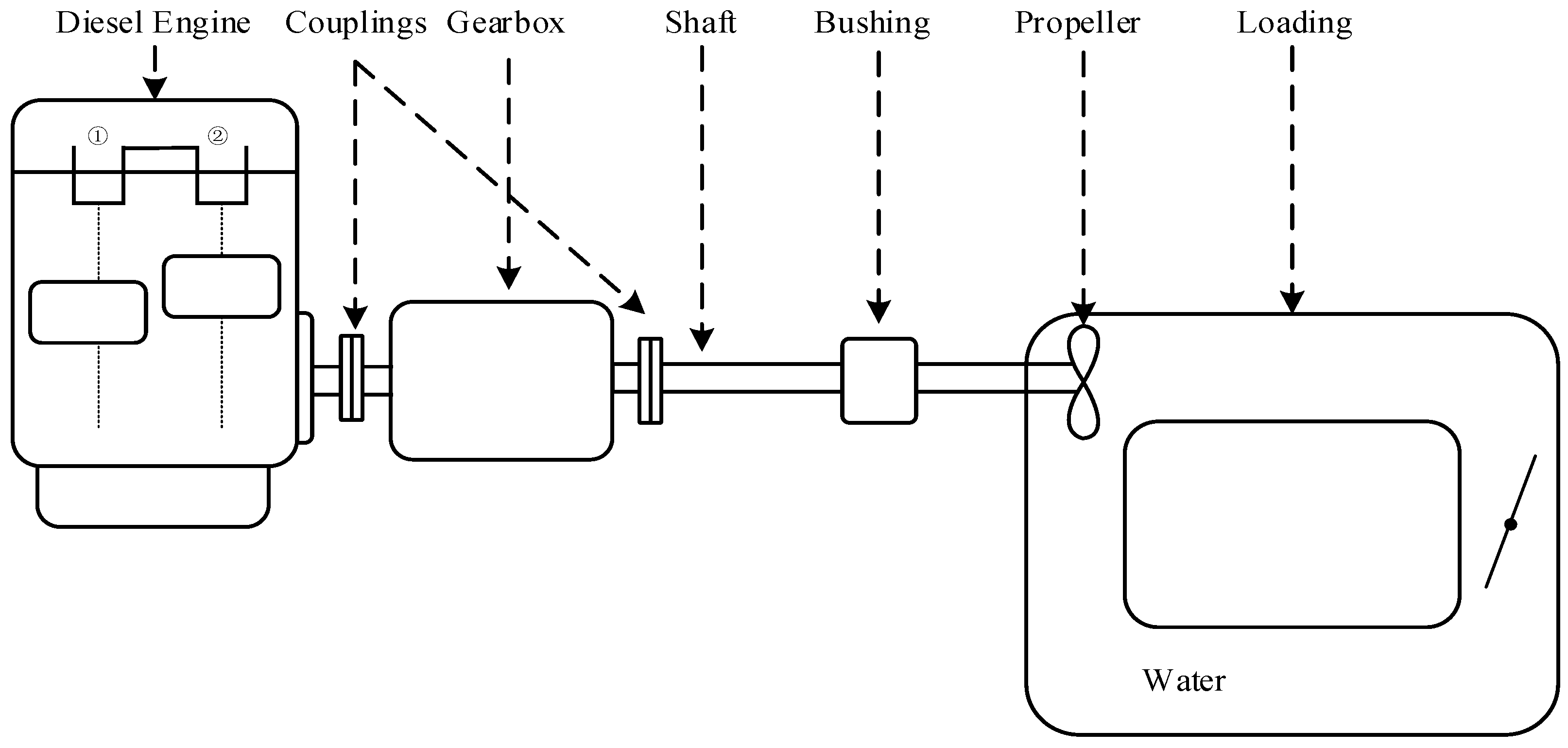
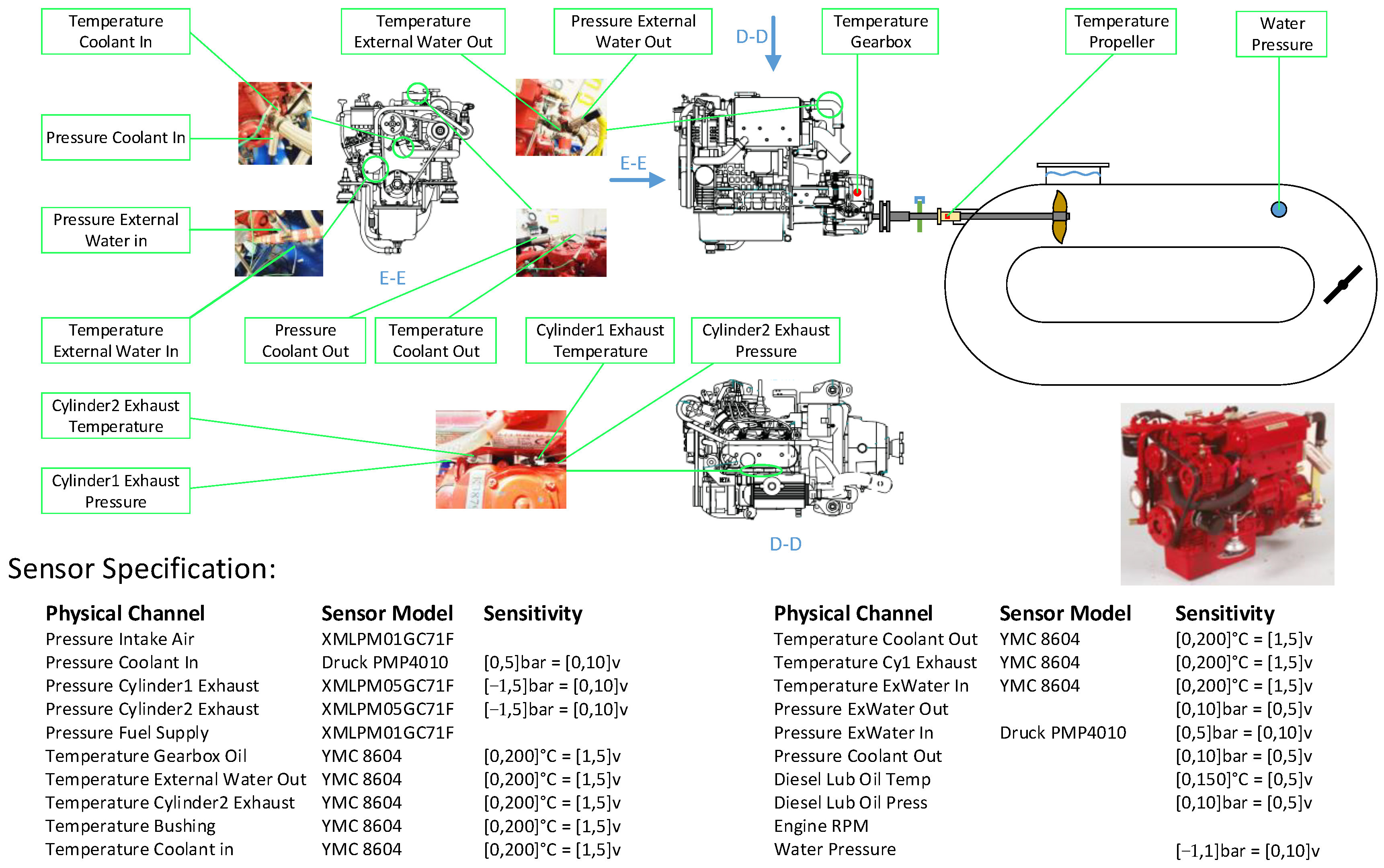
2. Experimental Setup
2.1. Marine System Simulator
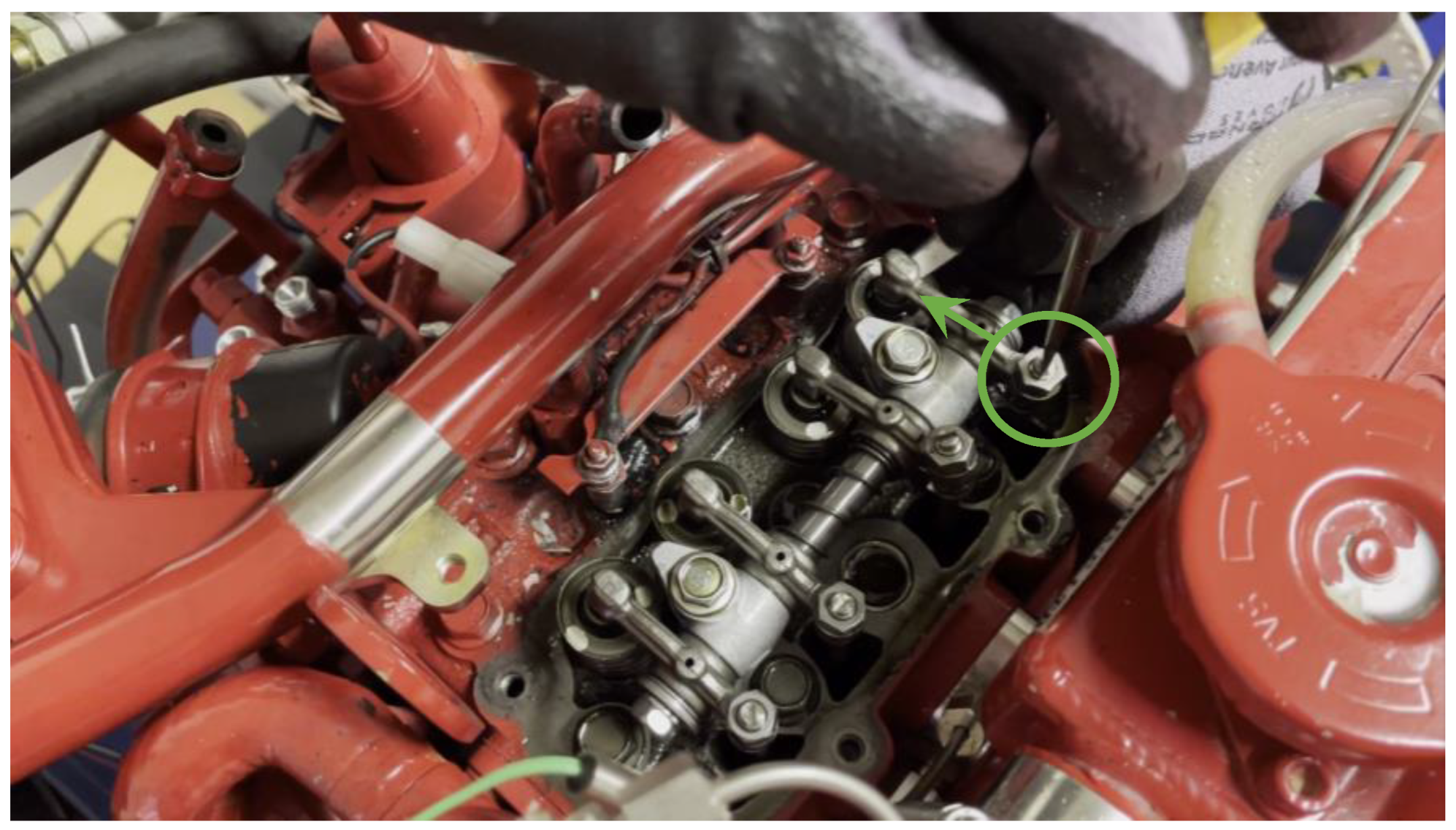
2.2. Sensor Placement
3. Online Anomaly Detection
3.1. Processing of Data
3.2. Physics-Based Multivariate Modelling
4. Fault Simulations
4.1. Misfire
4.2. Exhaust Valve Leakage
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Multivariate simplex polynomial model | |
| r | Modelling order |
| m | Number of variables |
| Unknown model coefficient | |
| Predicted value obtained from the model of variable t | |
| Residual between the predicted and measured values | |
| Positive number associated with the confidence interval | |
| CM | Condition monitoring |
| FD | Fault diagnosis |
| IAS | Instantaneous angular speed |
| ANN | Artificial neural network |
| SOM | Self-organising map |
| TDC | Top dead centre |
| CAN | Controller area network |
| TSA | Time-synchronous averaging |
| ADR | Angle domain resampling |
| IVC | Intake valve closing |
| IVO | Intake valve opening |
| EVC | Exhaust valve closing |
| EVO | Exhaust valve opening |
| STFT | Short-time Fourier transform |
| RMS | Root mean square |
| RPM | Revolution per minute |
References
- Xu, X.; Yan, X.; Yang, K.; Zhao, J.; Sheng, C.; Yuan, C. Review of condition monitoring and fault diagnosis for marine power systems. Transp. Saf. Environ. 2021, 3, 85–102. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Chen, Z. Application of grey modeling method to fitting and forecasting wear trend of marine diesel engines. Tribol. Int. 2003, 36, 753–756. [Google Scholar] [CrossRef]
- Nejad, A.R.; Purcell, E.; Valavi, M.; Hudak, R.; Lehmann, B.; Gutiérrez Guzmán, F.; Behrendt, F.; Bõhm, A.M.; von Bock und Polach, F.; Nickerson, B.M. Condition monitoring of ship propulsion systems: State-of-the-art, development trend and role of digital Twin. In Proceedings of the ASME 40th International Conference on Offshore Mechanics and Arctic Engineering, Virtual, 21–30 June 2021; p. V007T007A005. [Google Scholar]
- Byun, S.; Papaelias, M.; Márquez, F.P.G.; Lee, D. Fault-tree-analysis-based health monitoring for autonomous underwater vehicle. J. Mar. Sci. Eng. 2022, 10, 1855. [Google Scholar] [CrossRef]
- Zhang, Y.; Hong, J.; Shi, H.; Xie, Y.; Zhang, H.; Zhang, S.; Li, W.; Chen, H. Magnetic plug sensor with bridge nonlinear correction circuit for oil condition monitoring of marine machinery. J. Mar. Sci. Eng. 2022, 10, 1883. [Google Scholar] [CrossRef]
- Liang, X.; Fu, C.; Sun, X.; Duan, F.; Mba, D.; Gu, F.; Ball, A.D. An investigation of unsupervised data-driven models for internal combustion engine condition monitoring. In Mechanisms and Machine Science, Proceedings of the IncoME-VI and TEPEN 2021: Performance Engineering and Maintenance Engineering, Tianjin, China, 20–23 October 2021; Zhang, H., Feng, G., Wang, H., Gu, F., Sinha, J.K., Eds.; Springer: Cham, Switzerland, 2022; pp. 463–475. [Google Scholar]
- Ma, J.; Fu, C.; Zhang, H.; Chu, F.; Shi, Z.; Gu, F.; Ball, A.D. Modelling non-Gaussian surfaces and misalignment for condition monitoring of journal bearings. Measurement 2021, 174, 108983. [Google Scholar] [CrossRef]
- Jiang, J.; Hu, Y.; Fang, Y.; Li, F. Application and prospects of intelligent fault diagnosis technology for marine power system. Chin. J. Ship Res. 2020, 15, 56–67. [Google Scholar]
- Vanem, E.; Storvik, G.O. Anomaly detection using dynamical linear models and sequential testing on a marine engine system. In Proceedings of the Annual Conference of the PHM Society, St. Petersburg, FL, USA, 2–5 October 2017. [Google Scholar]
- Wang, J.; Zhang, C.; Ma, X.; Wang, Z.; Xu, Y.; Cattley, R. A multivariate statistics-based approach for detecting diesel engine faults with weak signatures. Energies 2020, 13, 873. [Google Scholar] [CrossRef]
- Xu, Y.; Huang, B.; Yun, Y.; Cattley, R.; Gu, F.; Ball, A.D. Model based IAS analysis for fault detection and diagnosis of IC engine powertrains. Energies 2020, 13, 565. [Google Scholar] [CrossRef]
- Perera, L.P.; Mo, B. Data analysis on marine engine operating regions in relation to ship navigation. Ocean Eng. 2016, 128, 163–172. [Google Scholar] [CrossRef]
- Cao, W.; Dong, G.; Chen, W.; Wu, J.; Xie, Y. Multisensor information integration for online wear condition monitoring of diesel engines. Tribol. Int. 2015, 82, 68–77. [Google Scholar] [CrossRef]
- Schneider, T.; Kruse, T.; Kuester, B.; Stonis, M.; Overmeyer, L. Evaluation of an energy self-sufficient sensor for monitoring marine gearboxes. Procedia Manuf. 2018, 24, 135–140. [Google Scholar] [CrossRef]
- Fan, L.; Wen, L.; Bai, Y.; Lan, Q.; Xu, J.; Gu, Y. Research on the correlation between fuel injection quantity and key structural parameters for the fuel system of marine diesel engines. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 7385–7398. [Google Scholar] [CrossRef]
- Boullosa-Falces, D.; Barrena, J.L.L.; Lopez-Arraiza, A.; Menendez, J.; Solaetxe, M.A.G. Monitoring of fuel oil process of marine diesel engine. Appl. Therm. Eng. 2017, 127, 517–526. [Google Scholar] [CrossRef]
- Johansen, S.S.; Nejad, A.R. On digital twin condition monitoring approach for drivetrains in marine applications. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019. [Google Scholar]
- Delvecchio, S.; Bonfiglio, P.; Pompoli, F. Vibro-acoustic condition monitoring of Internal Combustion Engines: A critical review of existing techniques. Mech. Syst. Signal Process. 2018, 99, 661–683. [Google Scholar] [CrossRef]
- Fu, C.; Sinou, J.-J.; Zhu, W.; Lu, K.; Yang, Y. A state-of-the-art review on uncertainty analysis of rotor systems. Mech. Syst. Signal Process. 2023, 183, 109619. [Google Scholar] [CrossRef]
- Dikis, K.; Lazakis, I.; Turan, O. Probabilistic risk assessment of condition monitoring of marine diesel engines. In Proceedings of the International Conference on Maritime Technology, Glasgow, Scotland, 7–9 July 2014. [Google Scholar]
- Wang, R.; Chen, H.; Guan, C. A Bayesian inference-based approach for performance prognostics towards uncertainty quantification and its applications on the marine diesel engine. ISA Trans. 2021, 118, 159–173. [Google Scholar] [CrossRef] [PubMed]
- Asuquo, M.P.; Wang, J.; Phylip-Jones, G.; Riahi, R. Condition monitoring of marine and offshore machinery using evidential reasoning techniques. J. Mar. Eng. Technol. 2021, 20, 93–124. [Google Scholar] [CrossRef]
- Yan, X.; Sheng, C.; Zhao, J.; Yang, K.; Li, Z. Study of on-line condition monitoring and fault feature extraction for marine diesel engines based on tribological information. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2015, 229, 291–300. [Google Scholar] [CrossRef]
- Cai, C.; Weng, X.; Zhang, C. A novel approach for marine diesel engine fault diagnosis. Clust. Comput. 2017, 20, 1691–1702. [Google Scholar] [CrossRef]
- Wang, J.; Sun, X.; Zhang, C.; Ma, X. An integrated methodology for system-level early fault detection and isolation. Expert Syst. Appl. 2022, 201, 117080. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Values |
|---|---|
| Model | Beta 14 |
| Cylinder | 2 |
| Bore | 67 mm |
| Stroke | 68 mm |
| Displacement | 479 cc |
| Combustion | Naturally aspirated, indirect injection |
| Power output | 9.5 kW@3600 rpm |
| Maximum Torque | 29.7 Nm@2600 rpm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Lu, K.; Li, Q.; Xu, Y.; Gu, F.; Ball, A.D.; Zheng, Z. Physics-Based Modelling for On-Line Condition Monitoring of a Marine Engine System. J. Mar. Sci. Eng. 2023, 11, 1241. https://doi.org/10.3390/jmse11061241
Fu C, Lu K, Li Q, Xu Y, Gu F, Ball AD, Zheng Z. Physics-Based Modelling for On-Line Condition Monitoring of a Marine Engine System. Journal of Marine Science and Engineering. 2023; 11(6):1241. https://doi.org/10.3390/jmse11061241
Chicago/Turabian StyleFu, Chao, Kuan Lu, Qian Li, Yuandong Xu, Fengshou Gu, Andrew D. Ball, and Zhaoli Zheng. 2023. "Physics-Based Modelling for On-Line Condition Monitoring of a Marine Engine System" Journal of Marine Science and Engineering 11, no. 6: 1241. https://doi.org/10.3390/jmse11061241
APA StyleFu, C., Lu, K., Li, Q., Xu, Y., Gu, F., Ball, A. D., & Zheng, Z. (2023). Physics-Based Modelling for On-Line Condition Monitoring of a Marine Engine System. Journal of Marine Science and Engineering, 11(6), 1241. https://doi.org/10.3390/jmse11061241