
Coordinated Obstacle Avoidance of Multi-AUV Based on Improved Artificial Potential Field Method and Consistency Protocol


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Statement and Model Description
2.1. Problem Description
- Movement limitation: In the actual motion state, AUVs are limited by the performance of their equipment and so on. Therefore, it is necessary to consider the impact of the actual model of the AUV in the motion limitation function on track planning during AUV navigation.
- Obstacle types: When AUVs perform missions in unknown underwater environments, they encounter multiple obstacle types. In this paper, the threat values of each point of the obstacles to AUVs are represented uniformly for modeling the probabilistic threat environment. Grouping different types of obstacles under the same map helps improve the speed and stability of the algorithm.
2.2. The Basics of Feedback Linearization
- (1)
- The nonlinear system input vector is equal in dimension to the output vector ;
- (2)
- Nonlinear systems exist of relative order ;
- (3)
- The dimensionality of the state vector of a nonlinear system is equal to the relative order of the system .
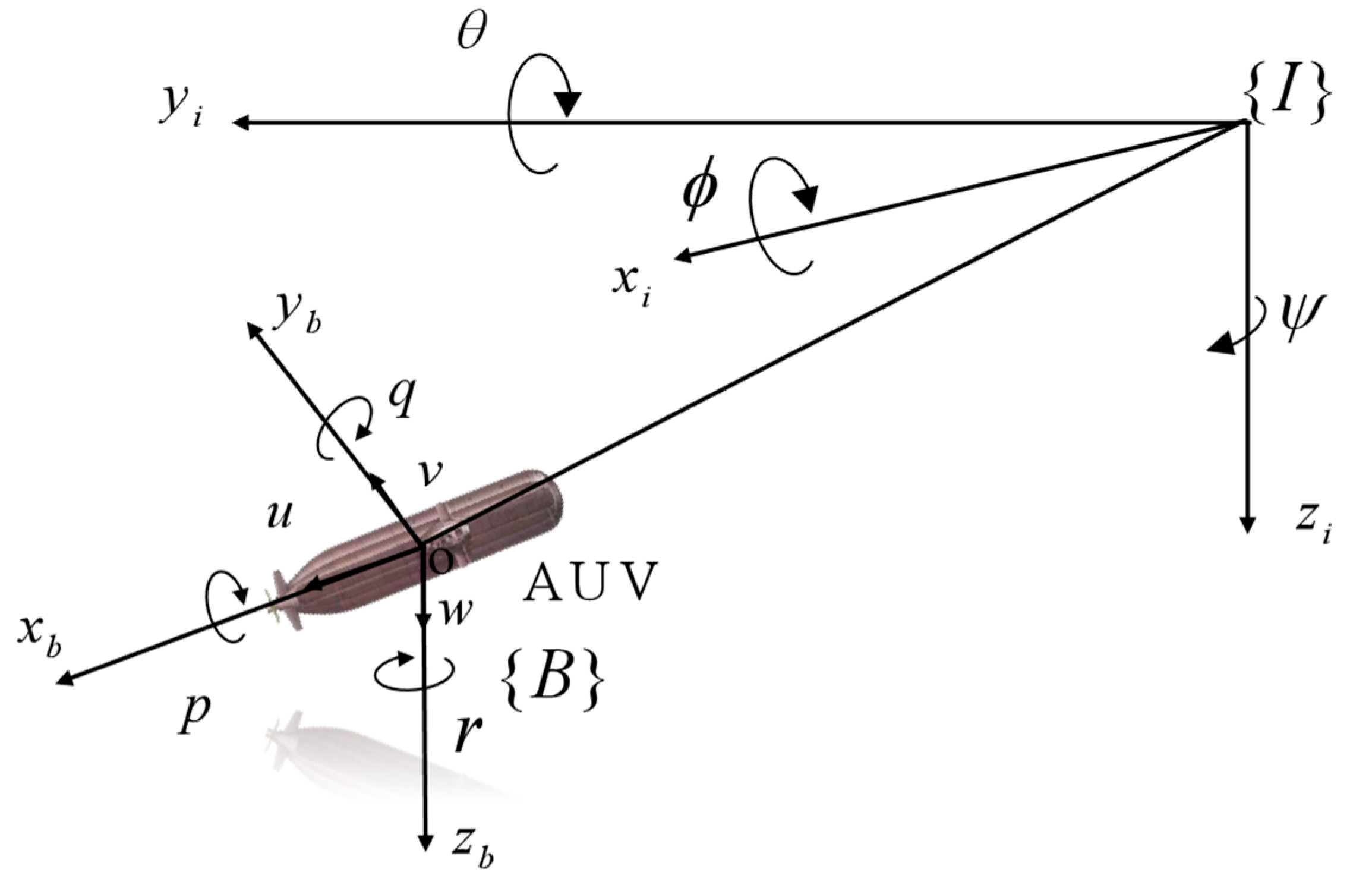
2.3. AUV Movement Model
2.4. Formation Communication Topology
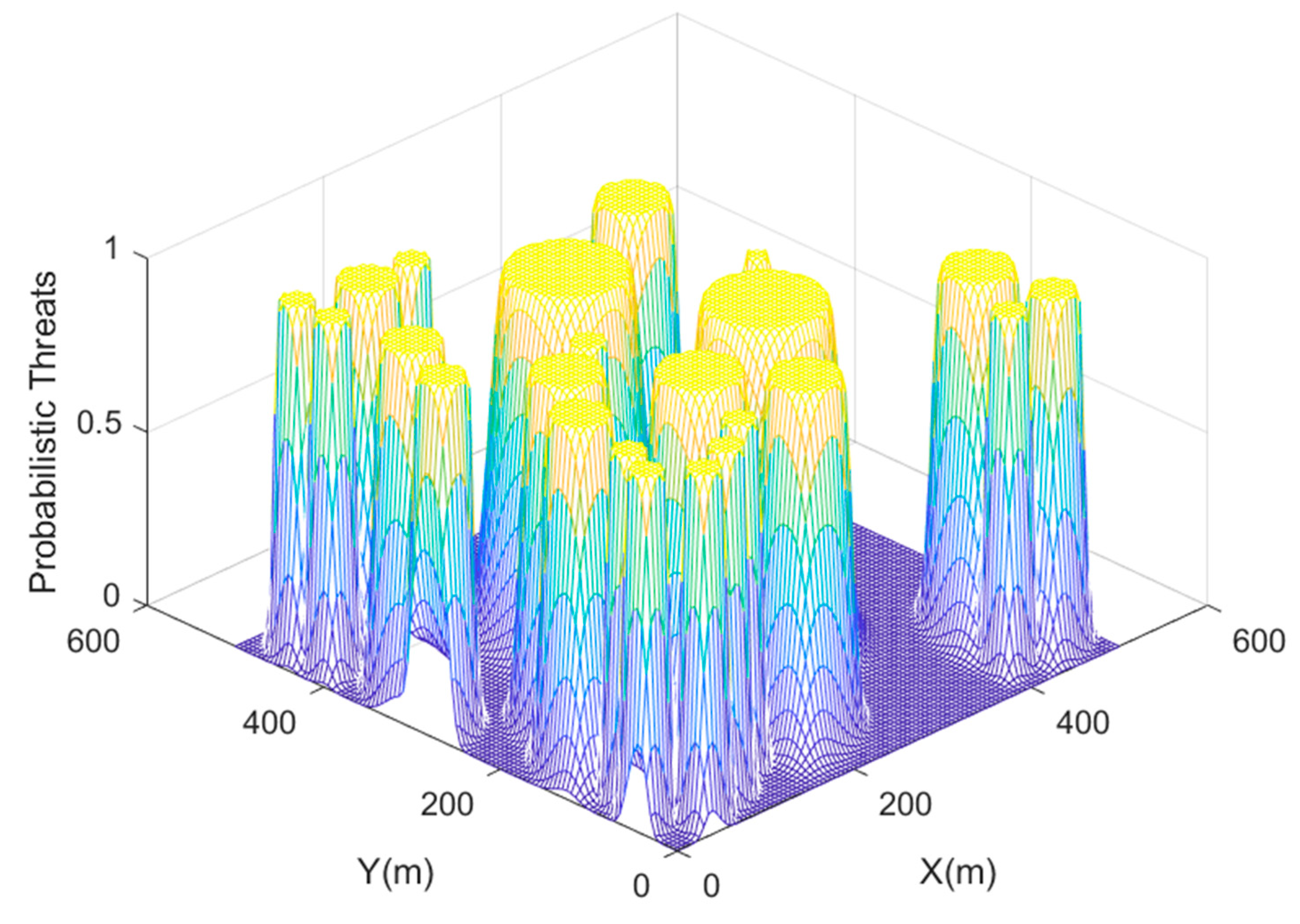
2.5. Probabilistic Threat Environment
3. Improvement of Artificial Potential Field Method
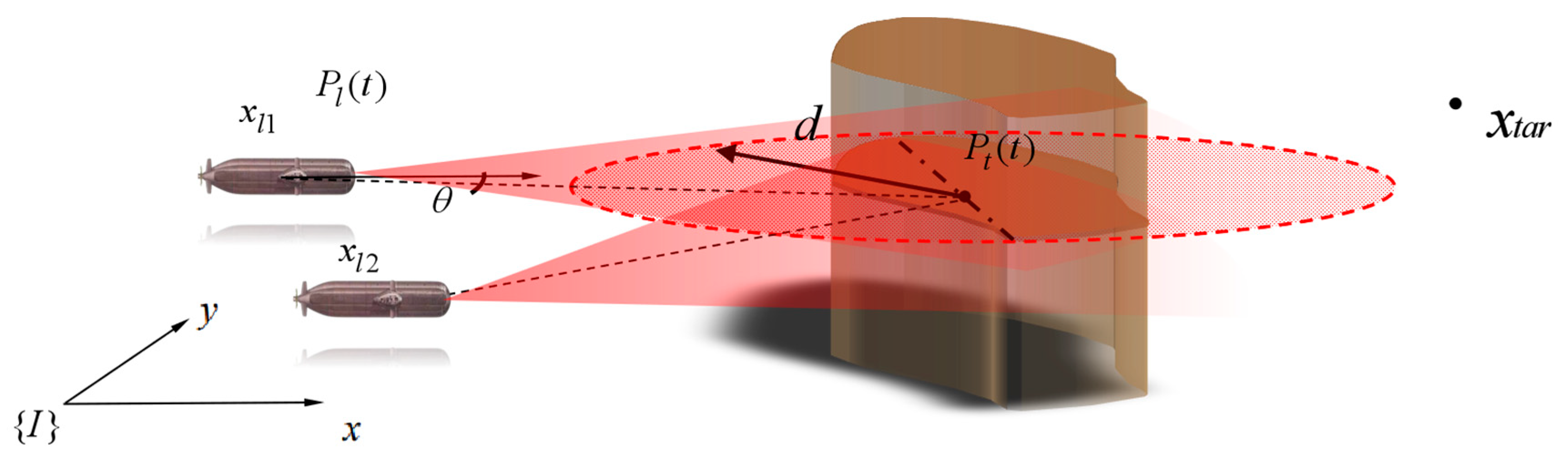
3.1. Auxiliary Potential Field Repulsion Field Design for Obstacles
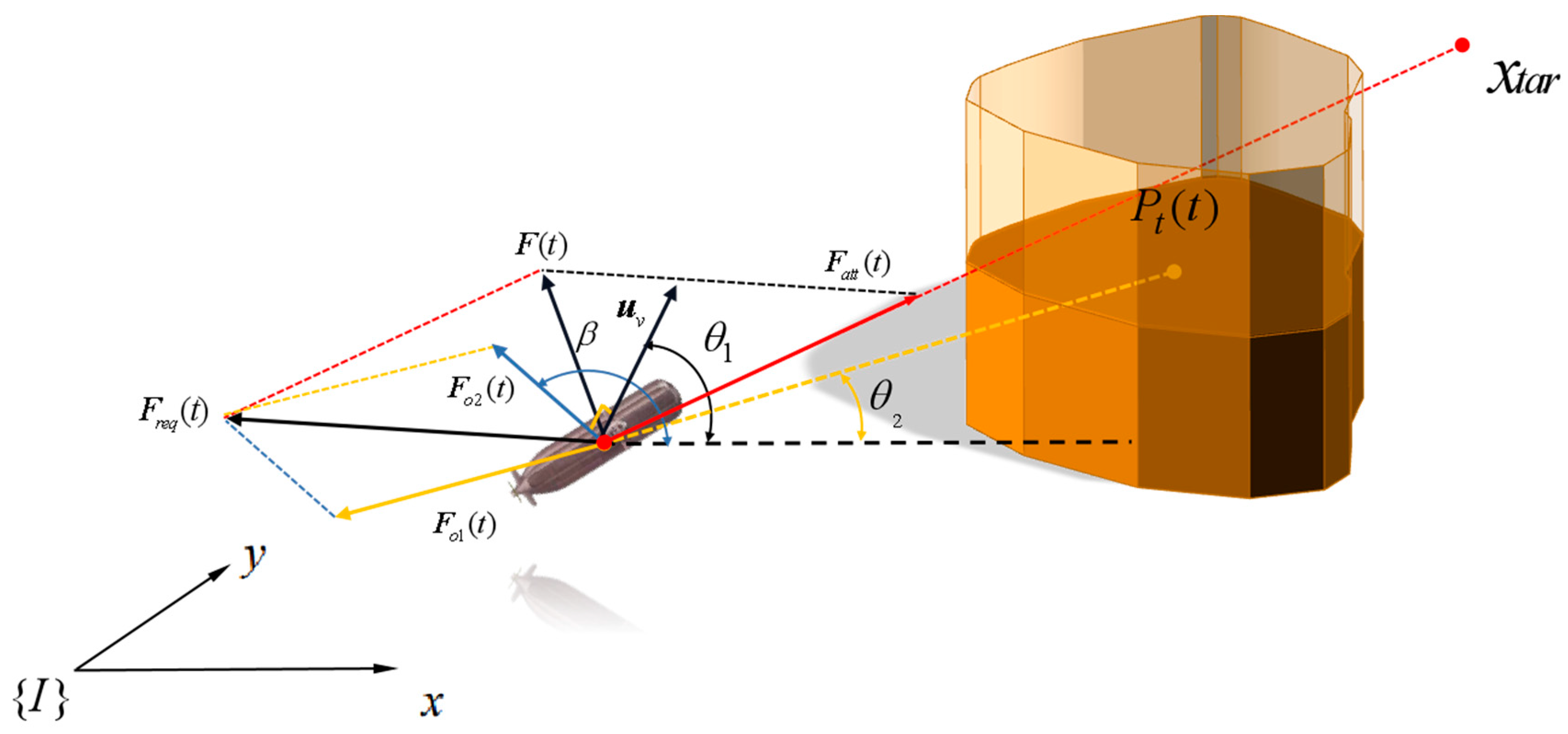
3.2. Gravitational Field Design for Target Points
3.3. Coordination and Control within the Formation
3.4. Algorithm Flow of Cooperative Obstacle Avoidance
4. Stability Analysis
5. Simulation Verification and Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Antonelli, G. Underwater Robots; Springer: Berlin/Heidelberg, Germany, 2014; pp. 20–23. [Google Scholar]
- Sahu, B.K.; Subudhi, B. Flocking control of multiple AUVs based on fuzzy potential functions. IEEE Trans. Fuzzy Syst. 2018, 26, 2539–2551. [Google Scholar] [CrossRef]
- Xin, L.; Zhu, D. An adaptive SOM neural network method to distributed formation control of a group of AUVs. IEEE Trans. Ind. Electron. 2018, 65, 8260–8270. [Google Scholar]
- Fu, J.; Sun, G. Trajectory Homotopy to Explore and Penetrate Dynamically of Multi-UAV. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24008–24019. [Google Scholar] [CrossRef]
- Dechter, R.; Pearl, J. Generalized best-first search strategies and the optimalityof A*. Assoc. Comput. Mach. 1985, 32, 505–536. [Google Scholar] [CrossRef]
- Cobb, H.G.; Grefenstette, J. Genetic algorithms for tracking changing environments. In Proceedings of the International Genetic Algorithms Conference, San Francisco, CA, USA, 1 June 1993; Naval Research Lab: Washington, DC, USA, 1993; pp. 1–8. [Google Scholar]
- Cui, R.X.; Li, Y.; Yan, W.S. Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT*. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 993–1004. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle Swarm Theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; IEEE: Piscataway, NJ, USA, 1995; pp. 39–43. [Google Scholar]
- Ma, Y.N.; Gong, Y.J.; Xiao, C.F.; Gao, Y.; Zhang, J. Path planning for autonomous underwater vehicles: An ant colony algorithm incorporating alarm pheromone. IEEE Trans. Veh. Technol. 2018, 68, 141–154. [Google Scholar] [CrossRef]
- Noguchi, Y.; Maki, T. Path planning method based on artificial potential field and reinforcement learning for intervention AUVs. In 2019 IEEE Underwater Technology (UT); IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Smith, S.M.; Ganesan, K.; An, P.E.; Dunn, S.E. Strategies for simultaneous multiple autonomous underwater vehicle operation and control. Int. J. Syst. Sci. 1998, 29, 1045–1063. [Google Scholar] [CrossRef]
- Sun, B.; Zhu, D.Q.; Tian, C.; Luo, C.M. Complete coverage autonomous underwater vehicles path planning based on glasius bio-inspired neural network algorithm for discrete and centralized programming. IEEE Trans. Cogn. Dev. Syst. 2018, 11, 73–84. [Google Scholar] [CrossRef]
- Yan, C.; Xiang, X.J.; Wang, C. Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. J. Intell. Robot. Syst. 2020, 98, 297–309. [Google Scholar] [CrossRef]
- Cheng, C.L.; Zhu, D.Q.; Sun, B.; Chu, Z.Z.; Nie, J.D.; Zhang, S. Path planning for autonomous underwater vehicle based on artificial potential field and velocity synthesis. In Proceedings of the IEEE 28th Canadian Conference on Electrical and Computer Engineering, Halifax, NS, Canada, 3–6 May 2015; pp. 717–721. [Google Scholar]
- Song, J.; Hao, C.; Su, J.C. Path planning for unmanned surface vehicle based on predictive artificial potential field. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420918461. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Hu, Q. A cooperative hunting method for multi-AUV swarm in un-dewater weak in formation environment with Obstacles. J. Mar. Sci. Eng. 2020, 10, 1266. [Google Scholar] [CrossRef]
- Wang, S.M.; Fang, M.C.; Hwang, C.N. Vertical obstacle avoidance and navigation of autonomous underwater vehicles with H infinity controller and the artificial potential field method. J. Navig. 2019, 72, 207–228. [Google Scholar] [CrossRef]
- Zhen, Q.Z.; Wan, L.; Li, Y.L.; Jiang, D.P. Formation control of a multi-AUVs system based on virtual structure and artificial potential field on SE(3). Ocean. Eng. 2022, 253, 111148. [Google Scholar] [CrossRef]
- Orozco-Rosas, U.; Montiel, O.; Sepulveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2021, 77, 236–251. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.X.; Zhang, H.H.; Yan, Z.P. A predictive guidance obstacle avoidance algorithm for AUV in unknown environments. Sensors 2019, 19, 2862. [Google Scholar] [CrossRef]
- Lin, X.G.; Tian, W.D.; Zhang, W. The leaderless multi-AUV system fault-tolerant consensus strategy under heterogeneous communication topology. Ocean. Eng. 2021, 237, 109594. [Google Scholar] [CrossRef]
- Yan, Z.P.; Liu, Y.B.; Zhou, J.J.; Zhang, W.; Wang, L. Consensus of multiple autonomous underwater vehicles with double independent Markovian switching topologies and timevarying delays. Chin. Phys. B 2017, 26, 040203. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley and Son: Chichester, UK, 2011. [Google Scholar]
- Li, J.; Zhang, H.D.; Chen, T.; Wang, J.Q. AUV Formation Coordination Control Based on Transformed Topology under Time-Varying Delay and Communication Interruption. J. Mar. Sci. Eng. 2022, 10, 950. [Google Scholar] [CrossRef]
- Zhang, B.T.; Liu, Y.; Liu, Y.; Wang, J. A path planning strategy for searching the most reliable path in uncertain environments. Int. J. Adv. Robot. Syst. 2017, 13, 23–32. [Google Scholar] [CrossRef]
- Johnson, P.; Vernotte, A.; Ekstedt, M.; Lagerstrom, R. pwnPr3d: An Attack-Graph-Driven Probabilistic Threat-Modeling Approach. In Proceedings of the 2016 11th International Conference on Availability, Reliability and Security (ARES), ARES 2016, Salzburg, Austria, 31 August–2 September 2016; pp. 278–283. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Zhang, W.; Wei, S.L.; Zeng, J.; Wang, N.X. Multi-UUV path planning based on improved artificial potential field method. Int. J. Robot. Autom. 2021, 36, 231–239. [Google Scholar]
- Chen, Y.L.; Ma, X.W.; Bai, G.Q.; Sha, Y.B.; Liu, J. Multi-autonomous underwater vehicle formation control and cluster search using a fusion control strategy at complex underwater environment. Ocean. Eng. 2021, 216, 108048. [Google Scholar] [CrossRef]
- Liang, D.; Liu, Z.Y.; Bhamra, R. Collaborative Multi-Robot Formation Control and Global Path Optimization. Appl. Sci. 2022, 12, 7046. [Google Scholar] [CrossRef]
- Civelek, C. Stability analysis of engineering/physical dynamic systems using residual energy function. Arch. Control Sci. 2019, 28, 201–222. [Google Scholar]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Ning, L. Coordinated Obstacle Avoidance of Multi-AUV Based on Improved Artificial Potential Field Method and Consistency Protocol. J. Mar. Sci. Eng. 2023, 11, 1157. https://doi.org/10.3390/jmse11061157
Yu H, Ning L. Coordinated Obstacle Avoidance of Multi-AUV Based on Improved Artificial Potential Field Method and Consistency Protocol. Journal of Marine Science and Engineering. 2023; 11(6):1157. https://doi.org/10.3390/jmse11061157
Chicago/Turabian StyleYu, Haomiao, and Luqian Ning. 2023. "Coordinated Obstacle Avoidance of Multi-AUV Based on Improved Artificial Potential Field Method and Consistency Protocol" Journal of Marine Science and Engineering 11, no. 6: 1157. https://doi.org/10.3390/jmse11061157
APA StyleYu, H., & Ning, L. (2023). Coordinated Obstacle Avoidance of Multi-AUV Based on Improved Artificial Potential Field Method and Consistency Protocol. Journal of Marine Science and Engineering, 11(6), 1157. https://doi.org/10.3390/jmse11061157