



A Concept Study on Design Alternatives for Minimizing Accident Consequences in Maritime Autonomous Surface Ships


Abstract
1. Introduction
1.1. Previous Study
1.2. Chracteristics of MASS from Emergency Response Point of View
2. Design Alternatives
2.1. Mitigate the Consequence of Flooding Accidents
2.2. Mitigate the Consequence of Fire Accidents
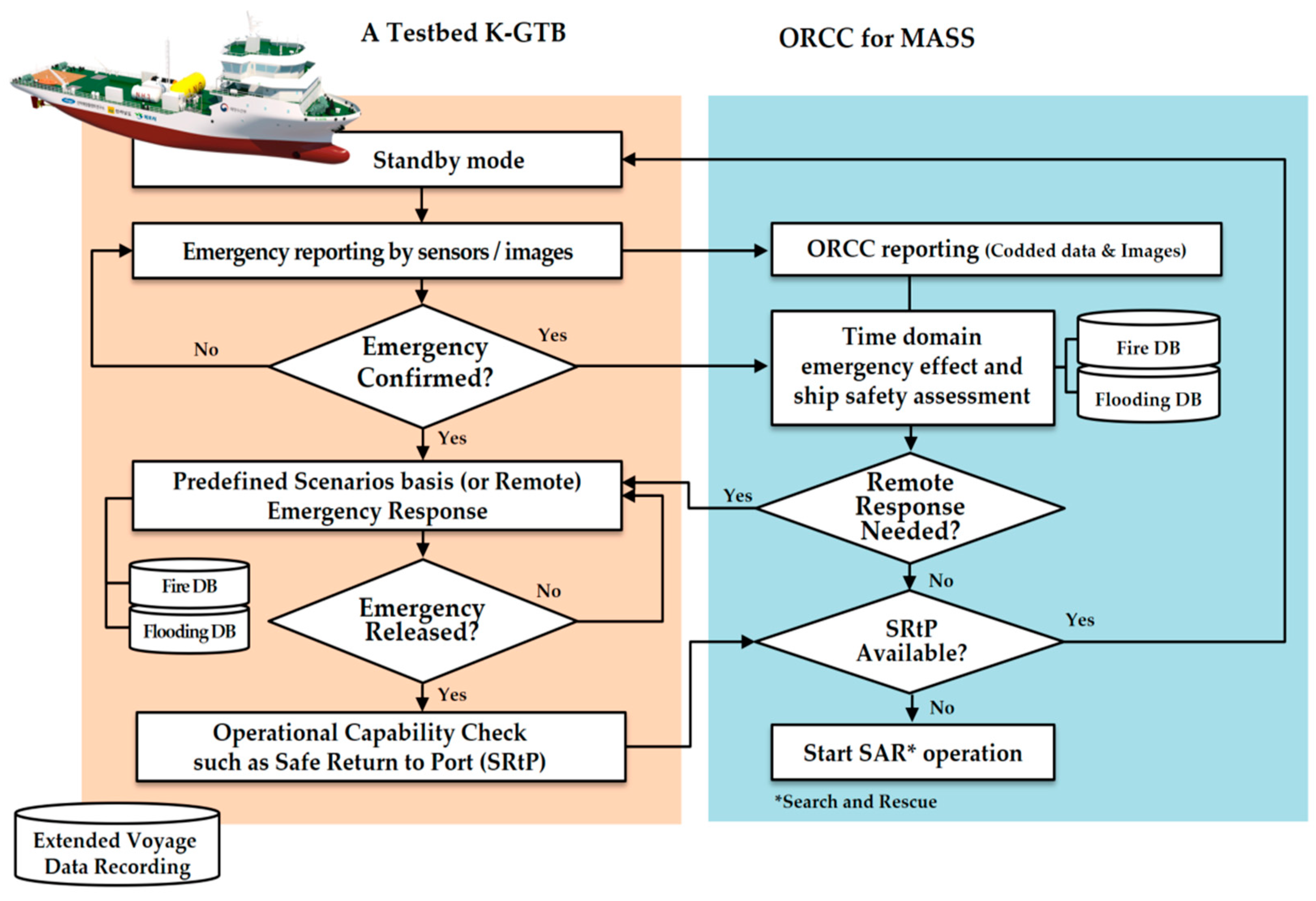
2.3. Remote Monitoring and Response to Emergencies
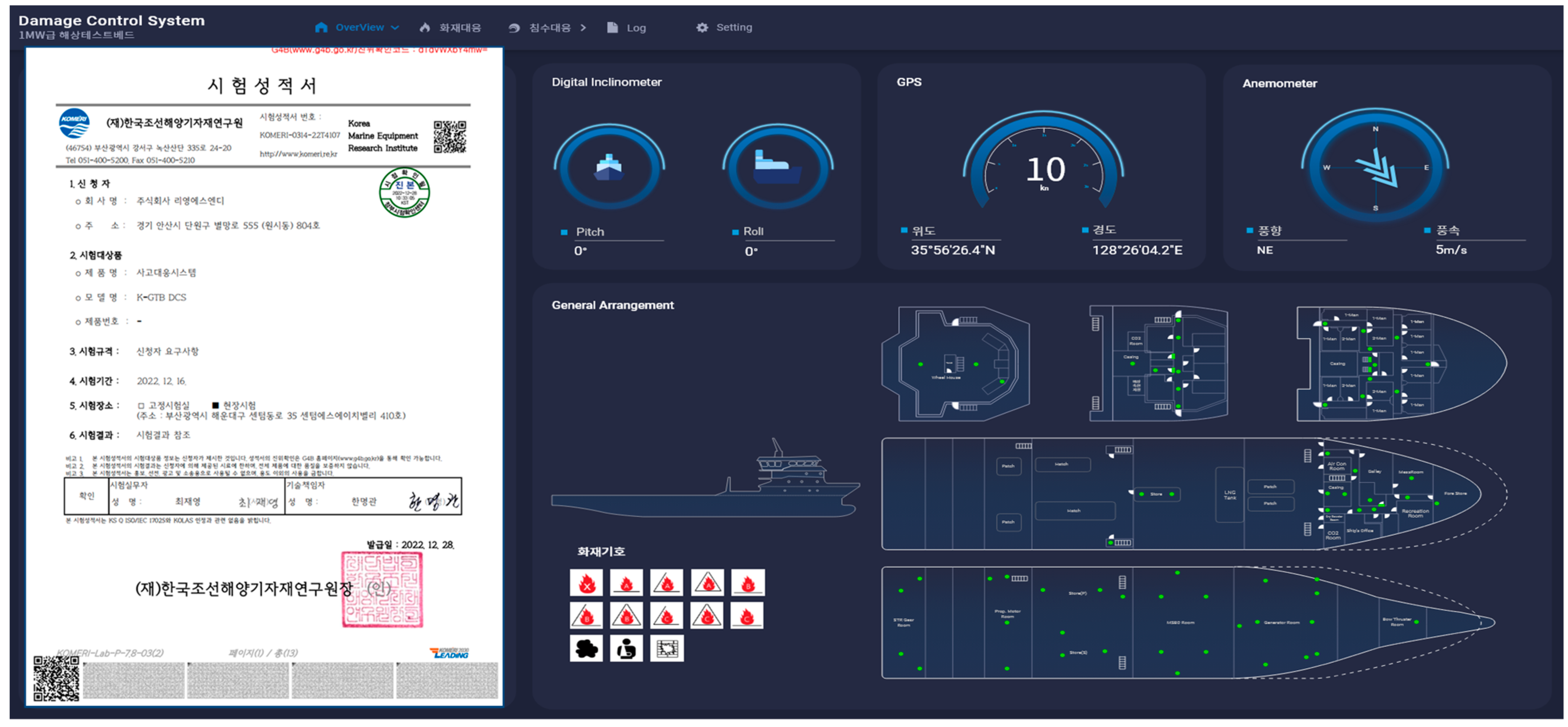
3. Implementation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IMO, MSC.1/Circ.1638. Outcome of the Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS). 2021. Available online: https://wwwcdn.imo.org/localresources/en/MediaCentre/PressBriefings/Documents/MSC.1-Circ.1638%20-%20Outcome%20Of%20The%20Regulatory%20Scoping%20ExerciseFor%20The%20Use%20Of%20Maritime%20Autonomous%20Surface%20Ships...%20(Secretariat).pdf (accessed on 11 April 2023).
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Suri, M.; Wróbel, K. Identifying factors affecting salvage rewards of crewless vessels—Lessons from a case study. WMU J. Marit. Aff. 2022, 21, 213–232. [Google Scholar] [CrossRef]
- Hoem, Å.S. The present and future of risk assessment of MASS: A literature review. In Proceedings of the 29th European Safety and Reliability Conference (ESREL), Hannover, Germany, 22–26 September 2019; pp. 22–26. Available online: https://www.researchgate.net/publication/338770018_The_present_and_future_of_risk_assessment_of_MASS_A_literature_review (accessed on 23 March 2023).
- Taguchi, K. Analysis on Collision Accidents and Maritime Autonomous Surface Ships. 2022. Available online: https://commons.wmu.se/cgi/viewcontent.cgi?article=3145&context=all_dissertations (accessed on 23 March 2023).
- Lee, E.-J.; Ruy, W.-S.; Seo, J. Application of reinforcement learning to fire suppression system of an autonomous ship in irregular waves. Int. J. Nav. Arch. Ocean Eng. 2020, 12, 910–917. [Google Scholar] [CrossRef]
- Mišković, D. MASS Level III–Exploration of Current Issues from an Operational Point of View. 2022. Available online: https://www.bib.irb.hr/1212655/download/1212655.Mikovi_2022-JMS_MASS_Level_3_Exploration_of_Current_issues_from.pdf (accessed on 23 March 2023).
- Ramos, M.A.; Utne, I.B.; Vinnem, J.E. Accounting for Human Failure in Autonomous Ship Operations; European Safety and Reliability Conference (ESREL): Trondheim, Norway, 2018; Available online: https://www.taylorfrancis.com/chapters/oa-edit/10.1201/9781351174664-45/accounting-human-failure-autonomous-ship-operations-ramos-utne-vinnem-mosleh (accessed on 23 March 2023).
- Martec, 2020. Cruise-DCS (Damage Control System). Available online: http://www.martec.it/?page_id=16 (accessed on 23 March 2023).
- Lee, D.; Kim, S.; Lee, K.; Shin, S.C.; Choi, J.; Park, B.J.; Kang, H.J. Performance-Based on-Board Damage Control System for Ships. Ocean. Eng. 2021, 223, 108636. Available online: https://www.sciencedirect.com/science/article/pii/S0029801821000718 (accessed on 23 March 2023). [CrossRef]
- Kang, H.J.; Choi, J.; Lee, D. Coded Shortcut Key Basis Rapid Plotting for Onboard Emergency Responses. Mar. Technol. Soc. J. 2021, 55, 73–87. Available online: https://www.ingentaconnect.com/content/mts/mtsj/2021/00000055/00000001/art00008 (accessed on 23 March 2023). [CrossRef]
- Lee, G.J.; Hong, J.-P.; Lee, K.K.; Kang, H.J. Application of Buoyancy Support System to Secure Residual Buoyancy of Damaged Ships. J. Mar. Sci. Eng. 2023, 11, 656. [Google Scholar] [CrossRef]
- Lee, G.J. Dynamic Orifice Flow Model and Compartment Models for Flooding Simulation of a Damaged Ship. Ocean Eng. 2015, 109, 635–653. Available online: https://www.sciencedirect.com/science/article/pii/S0029801815005314 (accessed on 23 March 2023). [CrossRef]
- Siu, N.; Woods, H.; Dey, M. NRC Fire Risk Research Plan: Fiscal Years 2001–2002. US Nuclear Regulatory Com-mission, Draft Report for Information, ADAMS ML003773018. Available online: https://nvlpubs.nist.gov/nistpubs/Legacy/TN/nbstechnicalnote1299.pdf (accessed on 23 March 2023).
- Northern Axcess Satellite Communication. Available online: https://www.northernaxcess.com/inmarsat-fleetbroadband-standard-rate-plan (accessed on 23 March 2023).
- ISO 23120:2022; Ships and Marine Technology—Graphical Symbols for Computer-Based Incident Response Systems. ISO: Geneva, Switzerland, 2022. Available online: https://www.iso.org/standard/74623.html (accessed on 30 December 2022).
- IMO. 2017. Escape Signs and Equipment Location Markings, IMO/A 30/Res.1116. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/AssemblyDocuments/A.1116(30).pdf (accessed on 30 December 2022).
- Kang, H.J.; Shin, J.-G.; Lee, J.K. A Business Model-Based Design of a Damage Control Support System for Naval Ships. Syst. Eng. 2012, 15, 14–27. Available online: https://incose.onlinelibrary.wiley.com/doi/pdf/10.1002/sys.20191 (accessed on 30 December 2022). [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Topic | Key Findings | References |
|---|---|---|
| The assessment of potential impact of unmanned vessels on maritime transportation safety | Introducing unmanned ships in the maritime industry poses safety challenges that require early stage safety measures and procedures, and further research is needed to understand their safety implications. | Wróbel, K. et al., 2017 [2] |
| Identifying factors affecting salvage rewards of crewless vessels—lessons from a case study | Salvaging crewless ships is complex, with a need for balance between interests and potential environmental risks. It is difficult to develop a standardized formula due to the lack of standards and history of discretion. | Suri, M. et al., 2022 [3] |
| The present and future of risk assessment of MASS: a literature review | Reviewed the current state of the art of risk assessment of maritime autonomous surface ships (MASS) and identified gaps in the literature. | Hoem, Å.S., et al., 2019 [4] |
| Analysis on collision accidents and maritime autonomous surface ships | Analyzed collision accidents involving MASS and identified factors that contributed to the accidents, such as malfunctioning sensors and lack of human intervention. | Taguchi, K. et al., 2022 [5] |
| Reinforcement learning to fire suppression system of an autonomous ship | A fire suppression solution for an autonomous ship. The model successfully reached the fire source despite the sea state and location, but the authors did not consider operation time delay. | Lee, E. et al., 2020 [6] |
| MASS Level III—exploration of current issues from an operational point of view | Explored operational issues related to MASS, such as communication, decision making, and cyber security, and proposed solutions to address these issues. | Mišković, D. et al., 2022 [7] |
| Scenario 1 | Scenario 2 | |
|---|---|---|
| 2nd Deck Vent | High (Ceiling) | Low (Floor) |
| 3rd Deck Vent | High (Ceiling) | Low (Floor) |
| Bottom Deck Vent | High (Ceiling) | High (Ceiling) |
| All doors are open. | ||
| A Class Fire Identified | A Class Fire-Fighting in Progress | A Class Fire-Fighting Completed | |
|---|---|---|---|
| Symbology |  |  |  |
| Action | Click(ORCC)/Automatic input(MASS) the class A fire button | Click(ORCC)/Automatic input(MASS) the class A fire button once more | Click(ORCC)/Automatic input(MASS) the Class A fire Button once more |
| Code | 000001 | 001001 | 100001 |
| Meaning | multiple sensor signal identified | fire-fighting system activated | fire-fighting completion confirmed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, G.J.; Lee, D.; Choi, J.; Kang, H.J. A Concept Study on Design Alternatives for Minimizing Accident Consequences in Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2023, 11, 907. https://doi.org/10.3390/jmse11050907
Lee GJ, Lee D, Choi J, Kang HJ. A Concept Study on Design Alternatives for Minimizing Accident Consequences in Maritime Autonomous Surface Ships. Journal of Marine Science and Engineering. 2023; 11(5):907. https://doi.org/10.3390/jmse11050907
Chicago/Turabian StyleLee, Gyeong Joong, Dongkon Lee, Jin Choi, and Hee Jin Kang. 2023. "A Concept Study on Design Alternatives for Minimizing Accident Consequences in Maritime Autonomous Surface Ships" Journal of Marine Science and Engineering 11, no. 5: 907. https://doi.org/10.3390/jmse11050907
APA StyleLee, G. J., Lee, D., Choi, J., & Kang, H. J. (2023). A Concept Study on Design Alternatives for Minimizing Accident Consequences in Maritime Autonomous Surface Ships. Journal of Marine Science and Engineering, 11(5), 907. https://doi.org/10.3390/jmse11050907