
Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins



Abstract
1. Introduction
2. Rigid–Flexible Robot Model
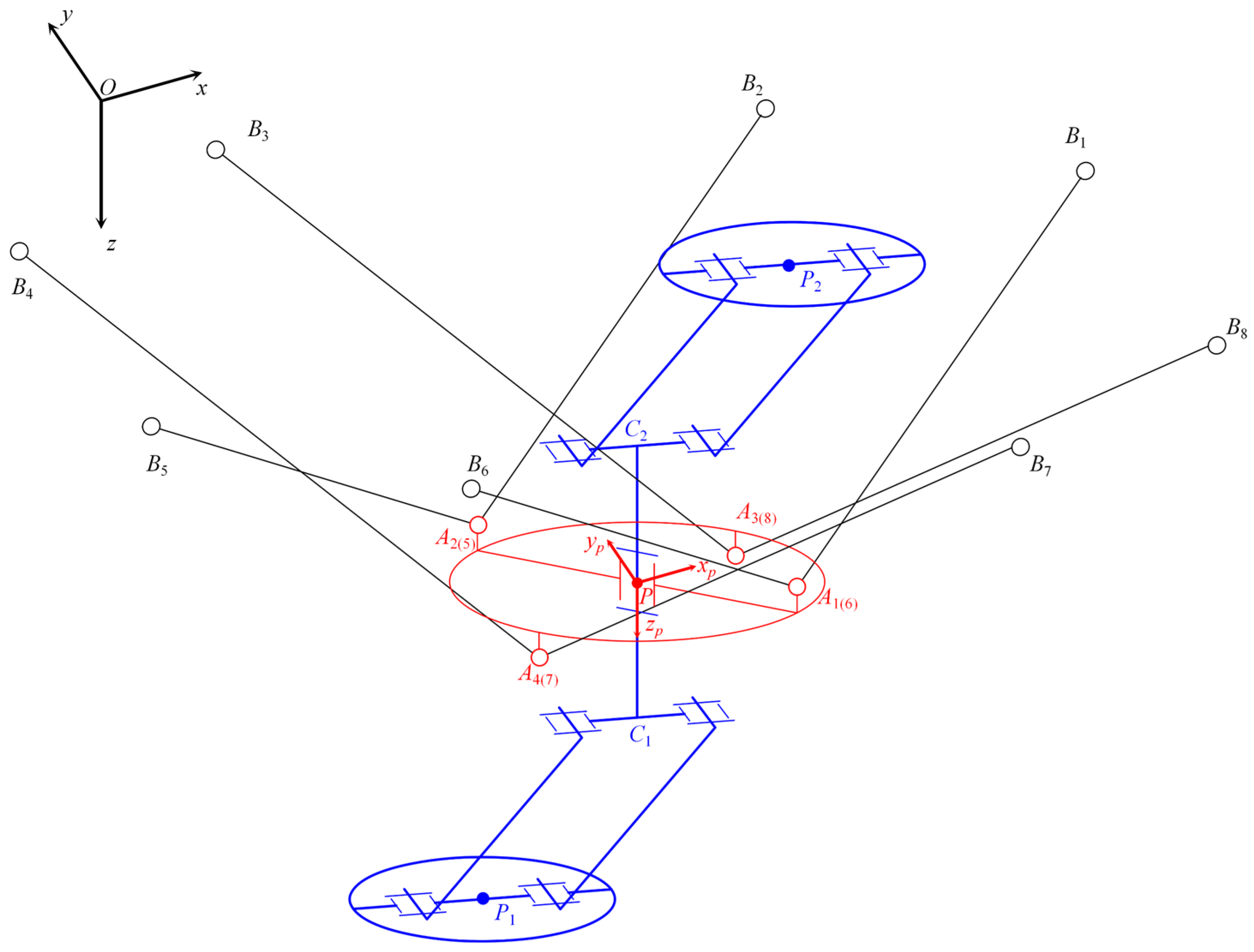
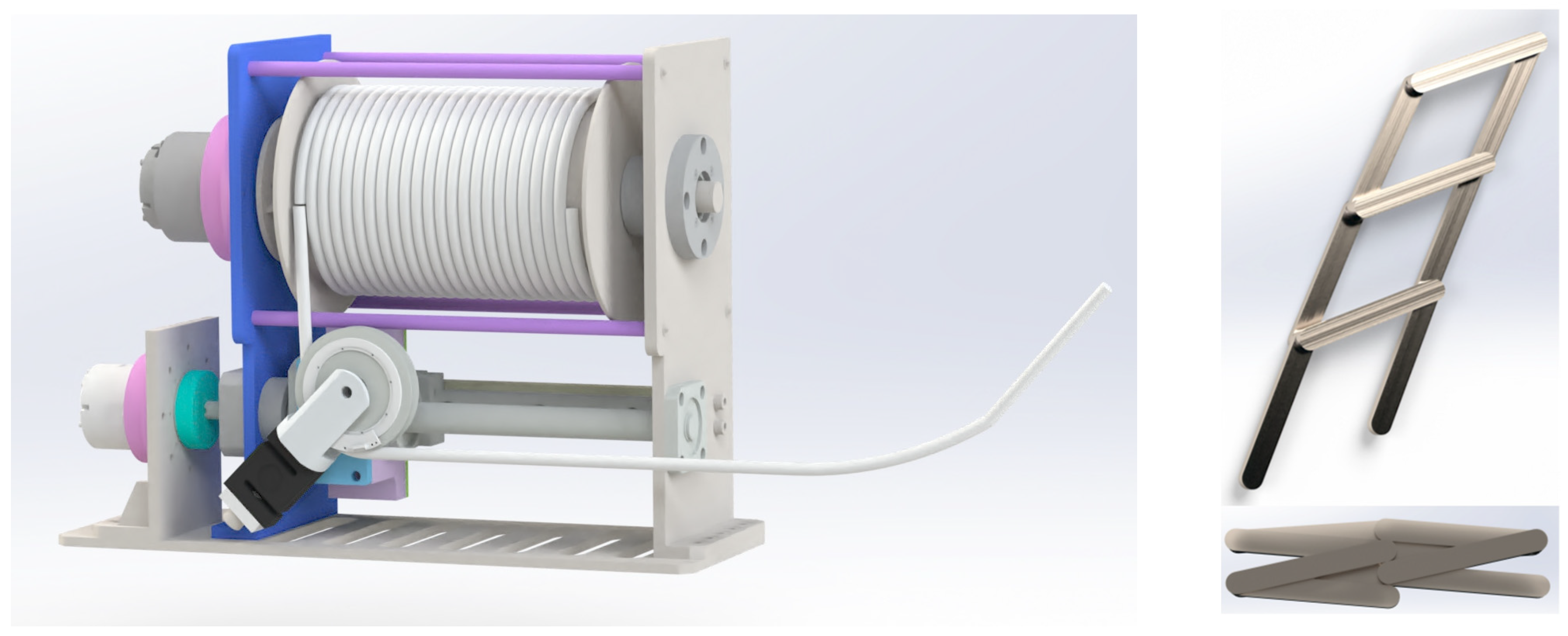
2.1. Rigid–Flexible Robot Geometric Model
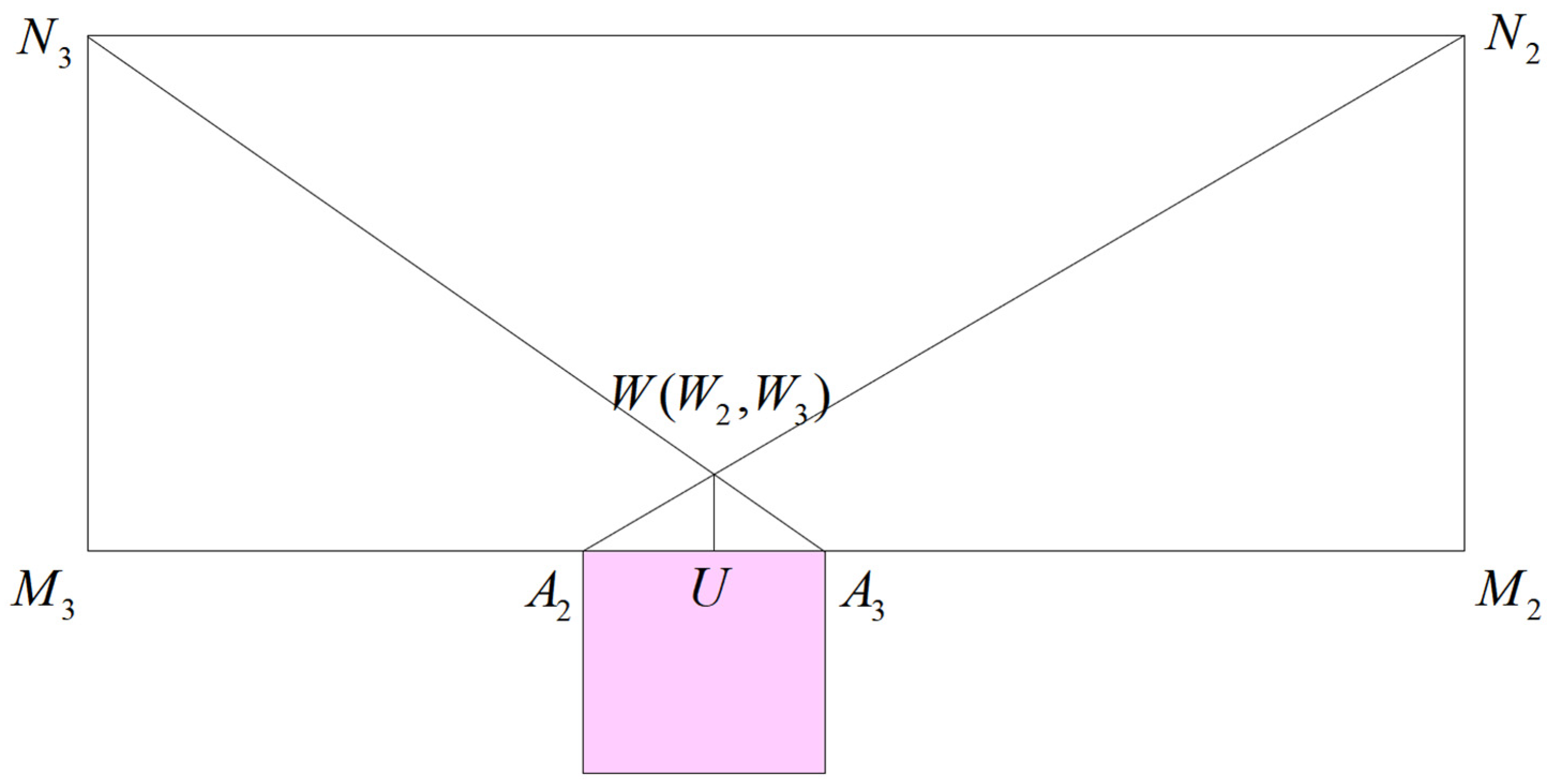
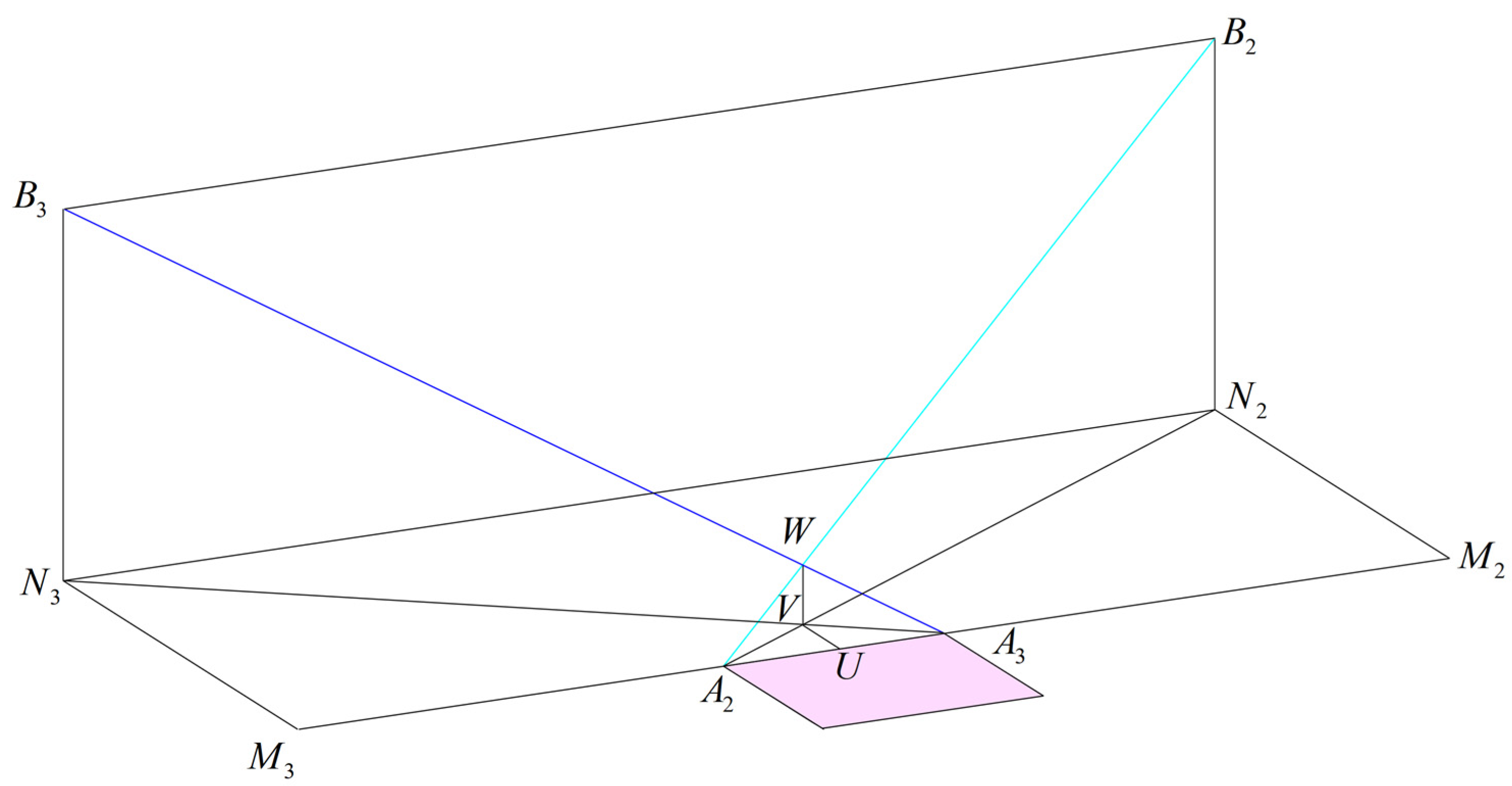
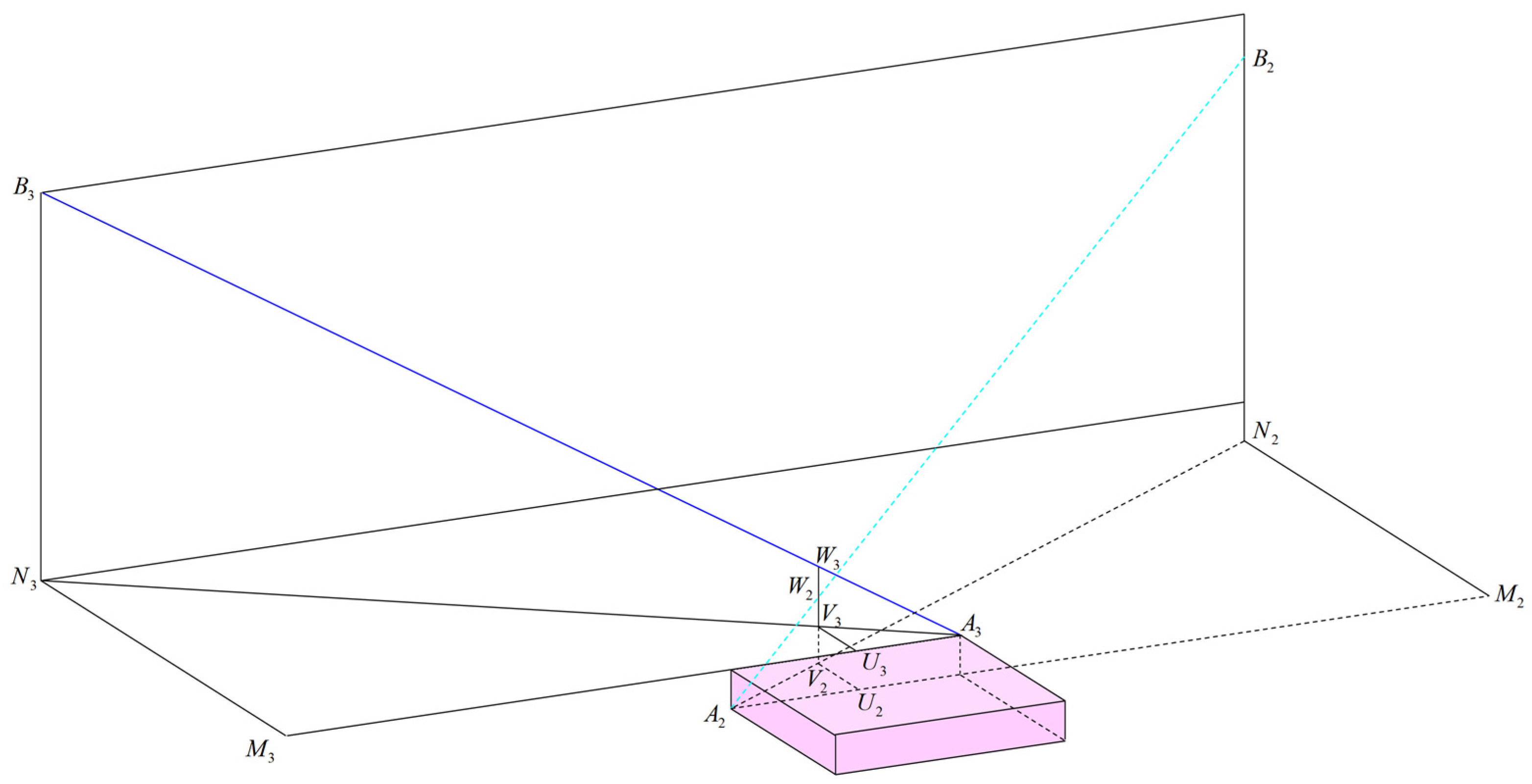
2.2. Cable Interference Analysis
3. Motion and Force Analysis of the Cable-Parallel Robot
3.1. Motion Analysis
3.2. Static Force Analysis
4. Workspace Analysis of the Cable-Parallel Robot
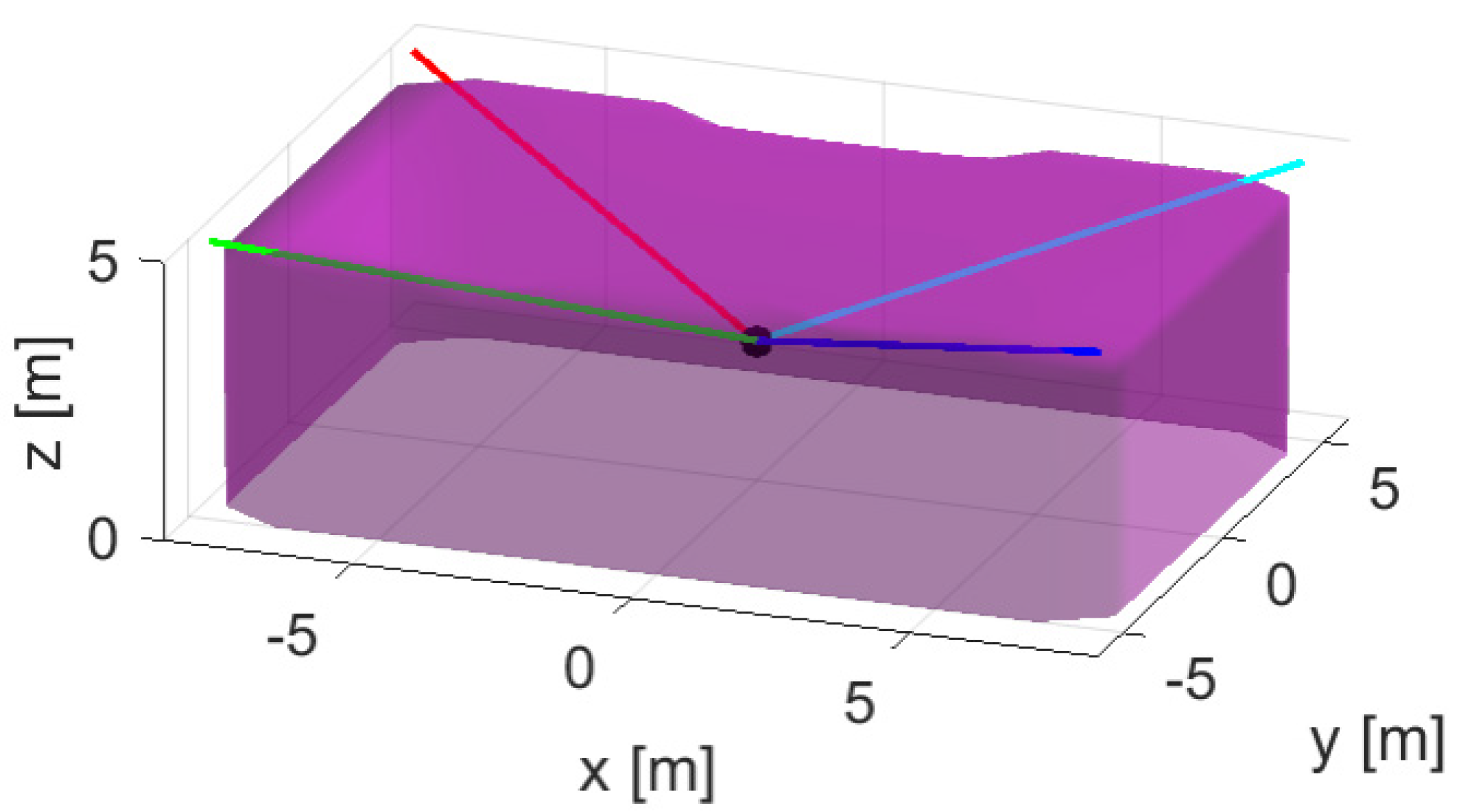
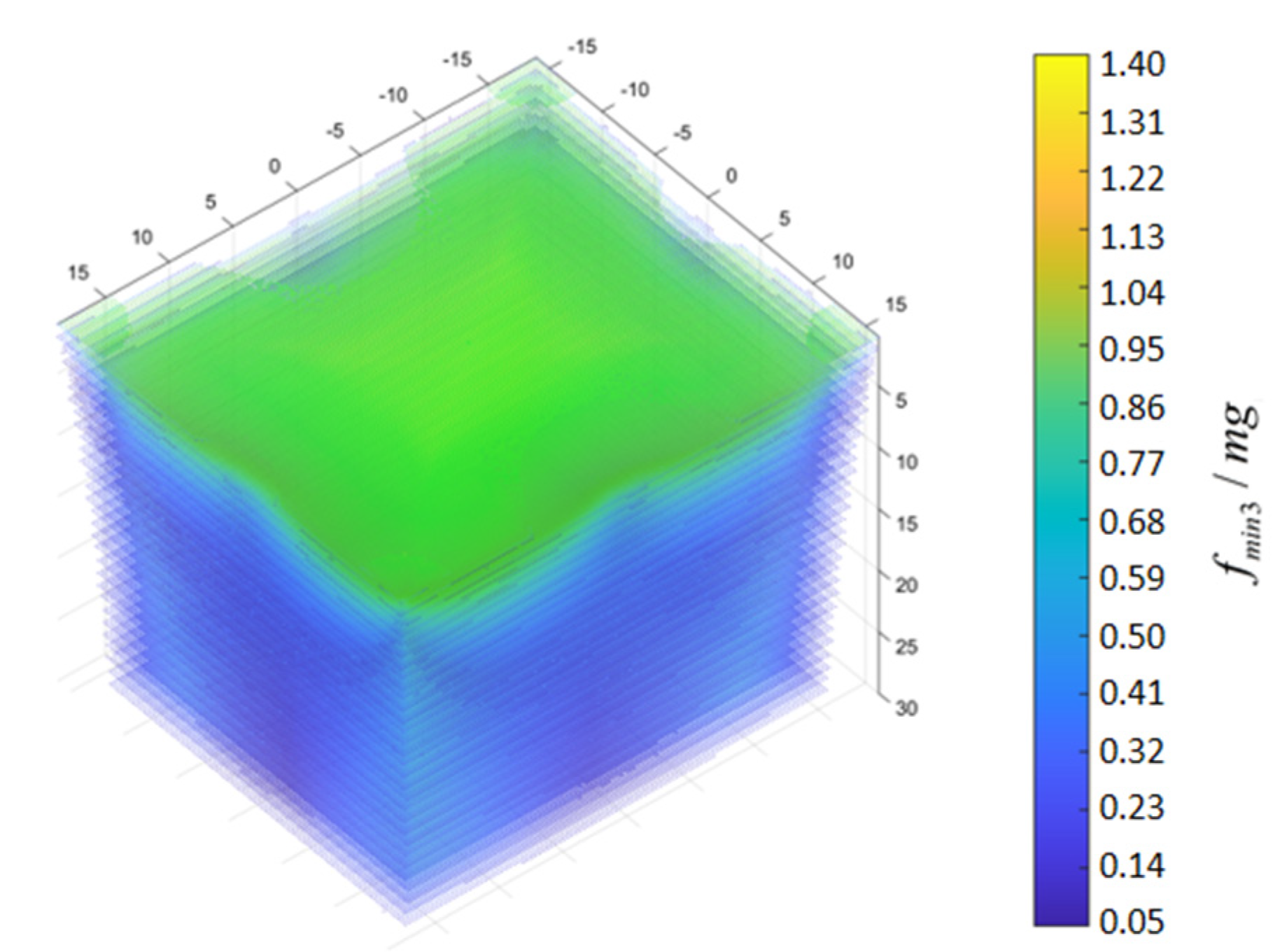
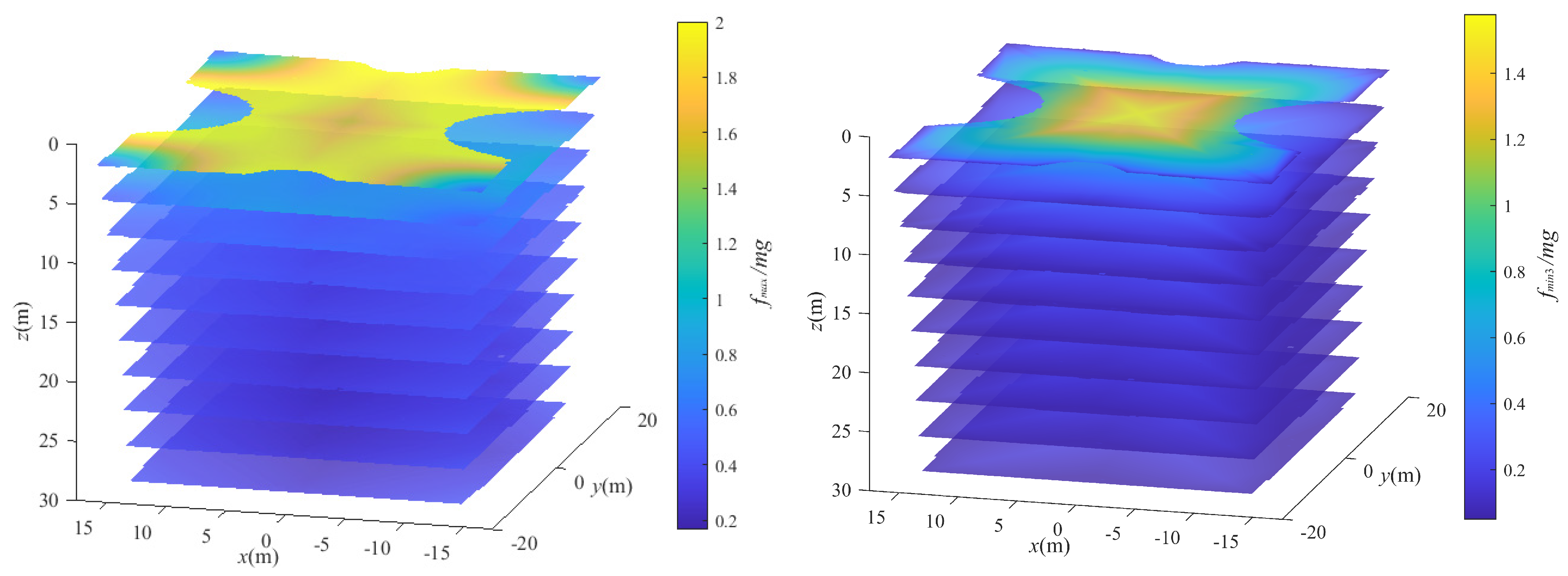
4.1. Reachable Workspace Analysis
4.2. Cable Force Analysis
5. Dimensional Analysis of the Frame-Type Manipulator
5.1. Rapid Search Method for Feasible Posture and End-Effector-Reachable Workspace of Rigid–Flexible Robotic System
5.2. End-Effector-Reachable Workspace Analysis of the Rigid–Flexible Robotic System
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- An, H.G. Research on the Tank Coating Techniques Optimization for the Product Oil Tanker. Master’s Thesis, Dalian University of Technology, Dalian, China, 2019. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L. Optimization and implementation of a high-speed 3-DOFs translational cable-driven parallel robot. Mech. Mach. Theory 2020, 145, 103693. [Google Scholar] [CrossRef]
- Zhang, Z.; Shao, Z.; Wang, L.; Shih, A.J. Optimal Design of a High-Speed Pick-and-Place Cable-Driven Parallel Robot. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Mechanisms and Machine Science; Springer: Cham, Switzerland, 2018; Volume 53. [Google Scholar] [CrossRef]
- Shao, Z.F.; Tang, X.Q.; Chen, X.; Wang, L.-P. Driving force analysis for the secondary adjustable system in FAST. Robotica 2011, 29, 903–915. [Google Scholar] [CrossRef]
- Gosselin, C. Cable-driven parallel mechanisms: State of the art and perspectives. Mech. Eng. Rev. 2014, 1, DSM0004. [Google Scholar] [CrossRef]
- Tang, X. An overview of the development for cable-driven parallel manipulator. Adv. Mech. Eng. 2014, 6, 823028. [Google Scholar] [CrossRef]
- Zi, B.; Duan, B.Y.; Du, J.L.; Bao, H. Dynamic modeling and active control of a cable-suspended parallel robot. Mechatronics 2008, 18, 1–12. [Google Scholar] [CrossRef]
- Ming, A. Study on multiple degree-of-freedom positioning mechanism using wires (part 1). Int. J. Jpn. Soc. Precis. Eng. 1994, 28, 131–138. [Google Scholar]
- Bostelman, R.; Albus, J.; Dagalakis, N.; Jacoff, A.; Gross, J. Applications of the NIST RoboCrane. In Proceedings of the 5th International Symposium on Robotics and Manufacturing, Maui, HI, USA, 14–18 August 1994; Volume 5, p. 1. [Google Scholar]
- Lamaury, J.; Gouttefarde, M. Control of a large redundantly actuated cable-suspended parallel robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4659–4664. [Google Scholar] [CrossRef]
- Caro, S.; Merlet, J.P. Failure analysis of a collaborative 4-1 cable-driven parallel robot. In New Trends in Mechanism and Machine Science; EuCoMeS 8; Springer International Publishing: Cham, Switzerland, 2020; pp. 440–447. [Google Scholar] [CrossRef]
- Alp, A.B.; Agrawal, S.K. Cable suspended robots: Design, planning and control. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 4275–4280. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Determination of the wrench-closure workspace of 6-DOF parallel cable-driven mechanisms. In Advances in Robot Kinematics: Mechanisms and Motion; Springer: Dordrecht, The Netherlands, 2006; pp. 315–322. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Gosselin, C.M. Analysis of the wrench-closure workspace of planar parallel cable-driven mechanisms. IEEE Trans. Robot. 2006, 22, 434–445. [Google Scholar] [CrossRef]
- Bosscher, P.; Riechel, A.T.; Ebert-Uphoff, I. Wrench-feasible workspace generation for cable-driven robots. IEEE Trans. Robot. 2006, 22, 890–902. [Google Scholar] [CrossRef]
- Pusey, J.; Fattah, A.; Agrawal, S.; Messina, E. Design and workspace analysis of a 6–6 cable-suspended parallel robot. Mech. Mach. Theory 2004, 39, 761–778. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Merlet, J.P.; Daney, D. Wrench-feasible workspace of parallel cable-driven mechanisms. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1492–1497. [Google Scholar] [CrossRef]
- Nurahmi, L.; Pramujati, B.; Caro, S.; Jeffrey. Dimension synthesis of suspended eight cables-driven parallel robot for search-and-rescue operation. In Proceedings of the 2017 International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 12–14 October 2017; pp. 237–241. [Google Scholar] [CrossRef]
- Handojo, V.A.; Syamlan, A.T.; Nurahmi, L.; Pramujati, B.; Tamara, M.N.; Wasiwitono, U. Cable driven parallel robot with big interference-free workspace. In Mechanism and Machine Science: Select Proceedings of Asian MMS 2018; Springer: Singapore, 2020; pp. 43–56. [Google Scholar] [CrossRef]
- Castelli, G.; Ottaviano, E.; González, A. Analysis and simulation of a new Cartesian cable-suspended robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2010, 224, 1717–1726. [Google Scholar] [CrossRef]
- Barrette, G.; Gosselin, C.M. Determination of the dynamic workspace of cable-driven planar parallel mechanisms. J. Mech. Des. 2005, 127, 242–248. [Google Scholar] [CrossRef]
- Gosselin, C.; Ren, P.; Foucault, S. Dynamic trajectory planning of a two-DOF cable-suspended parallel robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1476–1481. [Google Scholar] [CrossRef]
- Longval, J.M.; Gosselin, C. Dynamic trajectory planning and geometric design of a two-DOF translational cable-suspended planar parallel robot using a parallelogram cable loop. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 51814, p. V05BT07A030. [Google Scholar] [CrossRef]
- Gosselin, C. Global planning of dynamically feasible trajectories for three-DOF spatial cable-suspended parallel robots. In Cable-Driven Parallel Robots; Springer: Berlin/Heidelberg, Germany, 2013; pp. 3–22. [Google Scholar] [CrossRef]
- Jiang, X.; Gosselin, C. Dynamically feasible trajectories for three-dof planar cable-suspended parallel robots. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 46360, p. V05AT08A085. [Google Scholar] [CrossRef]
- Zoso, N.; Gosselin, C. Point-to-point motion planning of a parallel 3-dof underactuated cable-suspended robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2325–2330. [Google Scholar] [CrossRef]
- Jiang, X.; Barnett, E.; Gosselin, C. Dynamic point-to-point trajectory planning beyond the static workspace for six-DOF cable-suspended parallel robots. IEEE Trans. Robot. 2018, 34, 781–793. [Google Scholar] [CrossRef]
- Xiang, S.; Gao, H.; Liu, Z.; Gosselin, C. Trajectory Optimization for a Six-DOF Cable-Suspended Parallel Robot with Dynamic Motions Beyond the Static Workspace. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3903–3908. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value |
|---|---|
| Macro platform length | 2000 mm |
| Macro platform width | 2000 mm |
| Macro platform height (anchor point height difference) | 10 mm |
| Parallel cable spacing | 3464 mm |
| Total mass of macro platform, micro platform, and end effector | 100 kg |
| Minimum cable force limit (multiple of gravity) | 0.05 |
| Maximum cable force limit (multiple of gravity) | 2 |
| Parameters | Numerical Value |
|---|---|
| Maximum upper arm radius | 750 mm |
| Maximum lower arm radius | 750 mm |
| Short rod position PC connecting the upper and lower arms to the rotating arm | 100 mm |
| Upper and lower arm length CP | L |
| End platform radius | R |
| End Platform Radius R (mm) | 750 | 1000 | |
|---|---|---|---|
| Upper and Lower Arm Length L (mm) | |||
| 4000 |  |  | |
| 4500 |  |  | |
| 5000 |  |  | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qie, J.; Miao, Y.; Han, T.; Liu, H.; Shao, Z.; Chang, D. Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins. J. Mar. Sci. Eng. 2023, 11, 1063. https://doi.org/10.3390/jmse11051063
Qie J, Miao Y, Han T, Liu H, Shao Z, Chang D. Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins. Journal of Marine Science and Engineering. 2023; 11(5):1063. https://doi.org/10.3390/jmse11051063
Chicago/Turabian StyleQie, Jinbo, Yugang Miao, Tao Han, Huiju Liu, Zhufeng Shao, and Daofang Chang. 2023. "Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins" Journal of Marine Science and Engineering 11, no. 5: 1063. https://doi.org/10.3390/jmse11051063
APA StyleQie, J., Miao, Y., Han, T., Liu, H., Shao, Z., & Chang, D. (2023). Design and Reachability Analysis of a Rigid–Flexible Robot for Interior Wall Spraying of Large Oil Cabins. Journal of Marine Science and Engineering, 11(5), 1063. https://doi.org/10.3390/jmse11051063