In general, offshore fish farming structures are compliant in nature. It consists of flexible parts such as mooring chains, ropes, and fish nets. Moreover, in the offshore environment, waves, currents, and winds generate dynamic forces that induce interactive motions that can result in large displacements and rotations [
35]. With these dynamic influences, it is important to estimate accurate or acceptable force distributions through analytical procedures. Therefore, a design guidance is needed to suggest a method to employ dynamic environmental loads and their combinations, called design environmental loads and conditions.
From various sources, methods to estimate and combine three major dynamic environmental loads, wind, wave, and current, are introduced herein.
3.2.1. Wave
According to the ABS rule, the wave forces acting on offshore fish farming installations may consider following major force components [
10]:
- (a)
First order forces at wave frequencies.
- (b)
Second order forces at low frequencies.
- (c)
Second order forces at high frequencies.
- (d)
Mean drift force (steady component of the second order forces).
In order to calculate the aforenoted components, the fluid potential theory and the Morison equation are commonly used for solving the wave forces [
36,
37,
38,
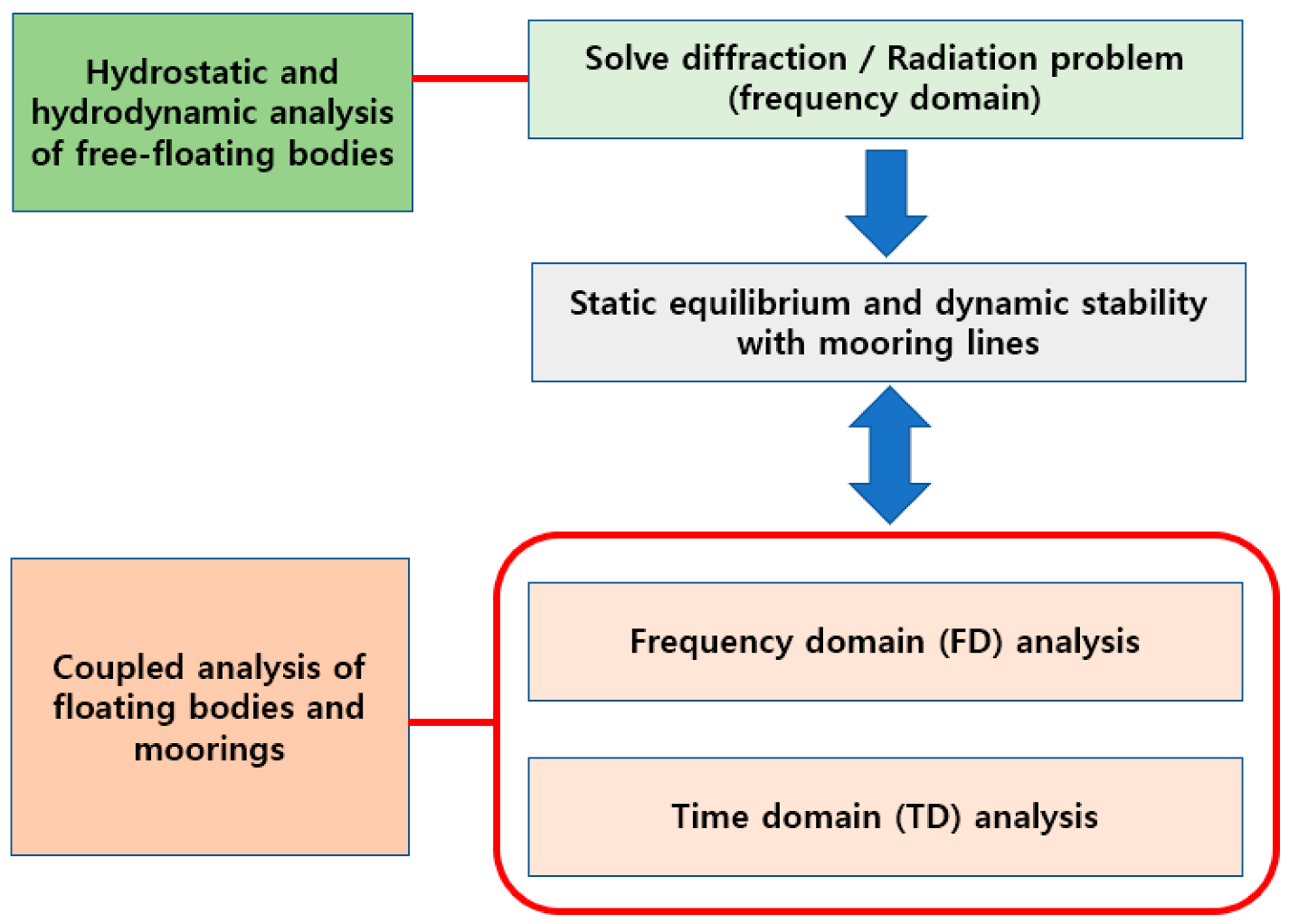
39]. The three-dimensional (3D) panel method, based on the fluid potential theory, is the most common numerical approach used for analysing hydrodynamic responses of a large-volume structure in waves. The method can represent the structure surface by a series of diffraction panels. On the other hand, the Morison equation approach is widely used for slender body components. To have accurate wave forces on the complex offshore fish farming structures, a hybrid method to consider both large-volume surface components by 3D diffraction panels, and small cross-sectional components by Morison elements is commonly accepted by classification rules for offshore fish farming installations [
10,
22].
- (1)
First order wave force (Linear wave force)
A linear potential wave analysis will usually suffice for prediction of the first order forces at wave frequencies [
40,
41,
42]. The term linear means that the pressure of fluid dynamics and resulting loads are proportional to the wave amplitude. For calculation of the wave loads on large-volume structures, which significantly alter the incident wave field, the linear potential wave theory with the boundary element method is often used to account for both the incident wave force and the forces resulting from wave diffraction and radiation.
The fluid flow field near a floating body may be defined as a velocity potential [
42], as:
in which
aw is the incident wave amplitude,
Re[] is the real part of the argument,
is the complex space-dependent potential function, ω is the wave angular frequency, and
is the position vector of a point on the floating body surface. The potential function is complex, but the resultant physical quantities, such as fluid pressure and body motions, in the frequency domain analysis can be obtained by considering the real part only.
In Equation (1),
may be distinguished from contributions of the incident waves, the diffracted waves, and the radiation waves induced by six degrees of freedom body motions [
42]. Therefore, it may be written as:
where
is the first order incident wave potential with unit wave amplitude,
is the corresponding diffraction wave potential, and
is the radiation wave potential due to a unit motion amplitude in the
k-th motion.
Knowing the wave velocity potentials as a special case with unit amplitude
aw = 1, the first order hydrodynamic pressure distribution can be calculated by using the linearized Bernoulli’s equation. In the case of pressure distribution, various fluid forces can be calculated by integrating the pressure over the wetted surface of the body [
42].
Total first order forces
Fj can be written as:
where
j = 1–6 represent the
j-th normal vector of freedom,
FIj is the incident wave force,
Fdj is the diffracting force,
Frjk is the radiation force induced by the structure’s
k-th degree of freedom rigid body motion.
On the other hand, for floating structures composed of slender members that do not significantly diffract the incident wave field (i.e., fully submerged), one may use semiempirical formulations, such as the Morison equation [
42], given by:
where
ρw is the water density,
is the flow acceleration,
is the acceleration of floating structures,
u is the flow velocity,
v is velocity of floating structures,
CA is the added mass coefficient,
CD is the drag coefficient,
V is the displaced volume of water, and
A is the cross-sectional area of the body perpendicular to the flow direction. The first term on the right side represents the inertia force, and the second term represents the drag force. In general, applications of the Morison equation may be used for slender structures with diameters less than one-fifth of the wave lengths.
In general, the column-stabilized type of offshore fish farms consists of several large columns and pontoons, and small cylindrical braces. A combination model of diffraction panel elements and Morison elements may be adopted for the calculation of hydrodynamic characteristics of the first order wave.
- (2)
Second order wave force at low frequency
Low frequency motions of a moored fish farming installation can be severely affected by the slowly varying wave drift force, which is a second order wave force [
22]. This wave force is proportional to the square of the wave amplitude [
43]. Estimation of the second order wave effect is one of the major design and analysis concerns for performance and safety in floating structures for offshore fish farming.
The second order wave force in a random sea-state is normally represented by a sum of
N wave components
and
), and this force oscillates at difference frequencies
, as given by the expression:
where
are the individual wave amplitudes, superscript (2) is the second order variation,
is the quadratic transfer function (QTF) to calculate the difference frequency loads, and Re denotes the real part. The QTF is presented as a complex quantity with amplitude and phase, which requires significant discretization. Therefore, commercial software packages (e.g., ANSYS AQWA [
44], WADAM [
45], NEMOH v.3 [
46]) are often used for calculations [
47]. Note that more details on the second order wave theory and solution at low frequency motions can be found in a paper written by Choi et al. [
43].
In order to simplify the calculations (i.e., simplifying the full QTF matrix), Newman’s approximation may be adopted, which is generally accepted for the hydrodynamic analysis of moored offshore structures in moderate and deep waters with long crested waves [
22,
48]. By using Newman’s approximation, computational time is significantly reduced, as a linear analysis can be adopted. The off-diagonal elements in the full QTF matrix can be approximated by the diagonal elements, as:
As the diagonal elements of the QTF matrix can be calculated from the first order velocity potential, there is no need to calculate the second order velocity potential.
Newman’s approximation usually gives satisfactory results for slow-drift motions in the horizontal plane when the natural period is much larger than the wave period. However, for slow-drift motions in the vertical plane (e.g., heave/pitch motions of spar type floaters), Newman’s approximation may underestimate the slow drift forces, and in such case a solution of the full QTF matrix is required. In particular, for netted structures with new floater concepts and/or relatively shallow water installations, caution should be taken as to whether Newman’s approximation is applicable [
22,
49].
- (3)
Second order wave force at high frequency
Second order wave force in a random sea-state oscillating at the sum frequencies
excites a vertical resonant response, in particular to the tendon stabilized floating units such as tension leg platforms (TLPs) [
22]. Since stiff tendons have a relatively high resonant frequency, vertical vibration near the resonant frequency can be excited by second order wave forces. This high frequency vibration is called springing, and the springing responses should be monitored when TLPs are chosen as a main floating unit for fish farming.
In order to calculate the sum frequencies
, the quadratic transfer function (QTF) can be used as similar to the different frequency wave loads. The sum frequency force in a random sea-state can be expressed as:
- (4)
Mean drift force
Based on the mean wetted body surface integration approach (i.e., near field method), general forms of the average wave drift force acting on a floating body in all directions of motions can be given as a special form from Equation (5), of which
and the sum frequency force components are excluded [
22,
42], so as to be expressed as:
3.2.2. Current
The estimation of current loads is a challenging task due to different local topographic conditions that vary greatly in magnitude and direction with depth. Therefore, it is difficult to provide sufficient background for determination of design current speeds and directions. Nevertheless, current loads can be the dominating steady force on the slender structures, mooring lines, and nets for offshore fish farming installations, and in particular to the fully submerged fish pen designs. It is therefore important to apply a reasonable current force with attention to the current excitation force, as well as the damping contribution on the related structural members [
22].
Appropriate current forces are to be calculated in areas where relatively high velocity currents occur on the submerged structures, mooring lines, and nets. The current forces on the submerged parts may be calculated as the drag force term of the Morison equation, given by Equation (4). In order to find the applicable extreme current velocity, the current velocities can be statistically analysed as a probabilistic distribution, such as the Weibull distribution [
29,
34].
BV’s rule for fish farms states that the current speed, direction, and velocity profiles are to be specified for circulational-, tidal-, and wind-generated components. Otherwise, the certification and classification will be based upon the following uniform current velocities at the still water level:
Circulational + tidal components: m/s.
Wind-induced component: m/s, where is the 10 min wind speed at 10 m above still water line.
According to NS 9415 [
28], in order to set the current speed and estimate an extreme value for the specified return period, the multiplication factors given in
Table 3 can be used to factor the maximum current speed over at least a four week measurement period at the site.
For example, if the maximum current over four weeks is 0.4 m/s, the 10 year current is assumed to be 0.4 × 1.65 = 0.66 m/s, while the 50 year current is set as 0.4 × 1.85 = 0.74 m/s, and the 100 year current is set as 0.4 × 2 = 0.8 m/s.
With regard to the direction of the current, the technical standard for Scottish finfish aquaculture states that the design current shall be at least eight concurrent directions, including the direction aligned to the highest speed current, may be expected [
29]. On the other hand, the Norwegian standard indicates that the current direction shall define the dominant direction of the fish farm installation. The most unfavourable direction that provides the highest load should be used, unless the installation is moored to the prevailing current direction [
28].
When several net pens are arranged in a row, such as Havfarm 1 (see a review paper written by Wang et al. [
7]), the rear net pen is less affected by the current force than the front net pen [
50,
51,
52,
53]. The current velocity drops rapidly after passing through nets one after the other in a row. This phenomenon is the result of the shielding effect, by which some of the water flow loses momentum when water flows through the front net. Owing to the loss of momentum, a continuing reduction of flow velocity occurs in the downstream fish pens. The current reduction factor,
R can be defined as:
where
is the incoming current velocity, and
is the local current velocity felt by the
i-th net panel facing the flow.
In order to calculate the local velocities on the net panels, a simple engineering approach was suggested by Løland [
54]
where
r is the current velocity reduction factor behind one net panel.
CD is the drag coefficient on the net panel which depends on the solidity ratio of the net panel.
CD can be approximated by using Equation (11), suggested by Lader and Enerhaug [
55], based on flexible net structure experiments.
where
Sn is the solidity ratio of the net panel and
is the angle between relative inflow direction to the net normal vector. Solidity ratio (
Sn) of the net panel is defined as the ratio between the projected area (
Ap) covered by the threads and the total area of the net panel (
A):
Note that the given Equation (11) is an empirical approach that can be highly dependent on the experimental setup. Other methods can also be adopted, such as by utilizing the Morison equation to mesh line/bar elements [
56] or screen type method by applying load to membrane net panels [
57]. However, to the authors’ knowledge, such approaches are not endorsed by maritime classifications, and the net is considered outside the classification scope.
3.2.3. Wind
Wind conditions can be important environmental parameters for predicting global motion responses of offshore fish farming installations. Especially, for the integrated system of offshore fish farms and wind turbines, the wind loads can be the dominating excitation force [
41,
58]. Therefore, accurate modelling of the wind effect is essential for the integrated designs with structural components above the water line. In general, the wind conditions are to be established from collected wind data at the relevant offshore site. The conditions should be consistent with other environmental parameters (e.g., wave, current) assumed to occur simultaneously [
10]. The statistical distribution to calculate the extreme wind load is to be based on the analysis and interpretation of wind data by a recognized method. It includes the frequency distributions of wind velocity and direction, and the recurrence period of extreme winds.
The wind loads acting on floating structures consist of two components: a static part resulting in an average offset and average slope, and a dynamic part due to wind gusts that excite the low frequency motions in surge, sway, and yaw. Owing to its importance, the wind loads are usually determined by wind tunnel tests [
59]. These tests are very often conducted early in the design stage. If significant changes are made to the deck/topside structures during detail design, repeating these wind tunnel tests may be needed. The gust wind loading component can be simulated by a wind gust spectrum, which can be adopted from existing wind spectra such as API and NPD spectra [
22]. It should be emphasised that a wind spectrum should be selected that best represents the actual geographical area in which the installation is located.
According to the ABS rule for floating production installation [
10], the wind load can be considered either as steady wind forces or a combination of steady and time-varying loads, which can be described as below:
If wind force is considered as a steady force, the wind velocity based on 1 min average velocity is to be used to calculate the wind load.
Effect of wind gust can be considered as a combination of steady load and a time-varying component calculated from an appropriate wind spectrum. In this approach, the wind velocity based on 1 h average velocity should be used for the steady wind load calculation.
Note that the former approach is preferred when the wind energy spectrum cannot be reliably derived [
60].
In addition, the BV rule [
24] states that for fish farms, 1 min wind velocity at 10 m above the mean water level is to be taken not less than 36 m/s for normal working and transit conditions, and not less than 51.5 m/s for the severe storm condition.
Based on the Norwegian standard [
28], when designing main components and total facilities for fish farms, a 50 year return period wind shall be established. If no empirical wind data is available for the relevant location, 35 m/s must be used as the design wind load. If the wind data from meteorological stations is available, a 50 year return period shall be used for dimensioning loads. The maximum wind speed shall be indicated as 10 min of mean wind at a reference height of 10 metres above sea level. Measurements shall take place over a period of three months at a location, with subsequent statistical analysis and extrapolation.
According to DNV’s recommendations, the averaging time for wind speeds and the reference height must always be specified, as the wind speed varies with time, and it also varies with respect to the height above the sea surface. A reference height of H = 10 m and average times of 1 min, 10 min, and 1 h are commonly adopted, and wind speed averaging over 1 min is often referred to as the sustained wind speed.
The shapes of structures exposed to wind and vertical height from the sea water surface will influence wind pressure on a particular windage (i.e., area exposed to wind). ABS suggests a simple equation that makes use of some coefficients to consider different shapes at different heights to calculate the wind pressure
Pwind.
where
Cs is the shape coefficient,
Ch is the height coefficient, and
Vref is the velocity of wind at a reference height of 10 m from the sea water surface for 1 h average speed. Examples of coefficients are given in
Table 4 and
Table 5. More information can be found in ABS’s guidance [
10].
Note that ABS does not specify other shapes, but suggests applicable shape coefficients depending on parts of the structure.
Table 5.
Height coefficient Ch for windages.
Table 5.
Height coefficient Ch for windages.
| Height above Water Line (m) | Ch |
|---|
| 1 min | 1 h |
|---|
| 0.0–15.3 | 1.00 | 1.00 |
| 15.3–30.5 | 1.18 | 1.23 |
| 30.5–46.0 | 1.31 | 1.40 |
| 46.0–61.0 | 1.40 | 1.52 |
| 61.0–76.0 | 1.47 | 1.62 |
| 76.0–91.5 | 1.53 | 1.71 |
| 91.5–106.5 | 1.58 | 1.78 |


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}



