
Deriving Coastal Shallow Bathymetry from Sentinel 2-, Aircraft- and UAV-Derived Orthophotos: A Case Study in Ligurian Marinas

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
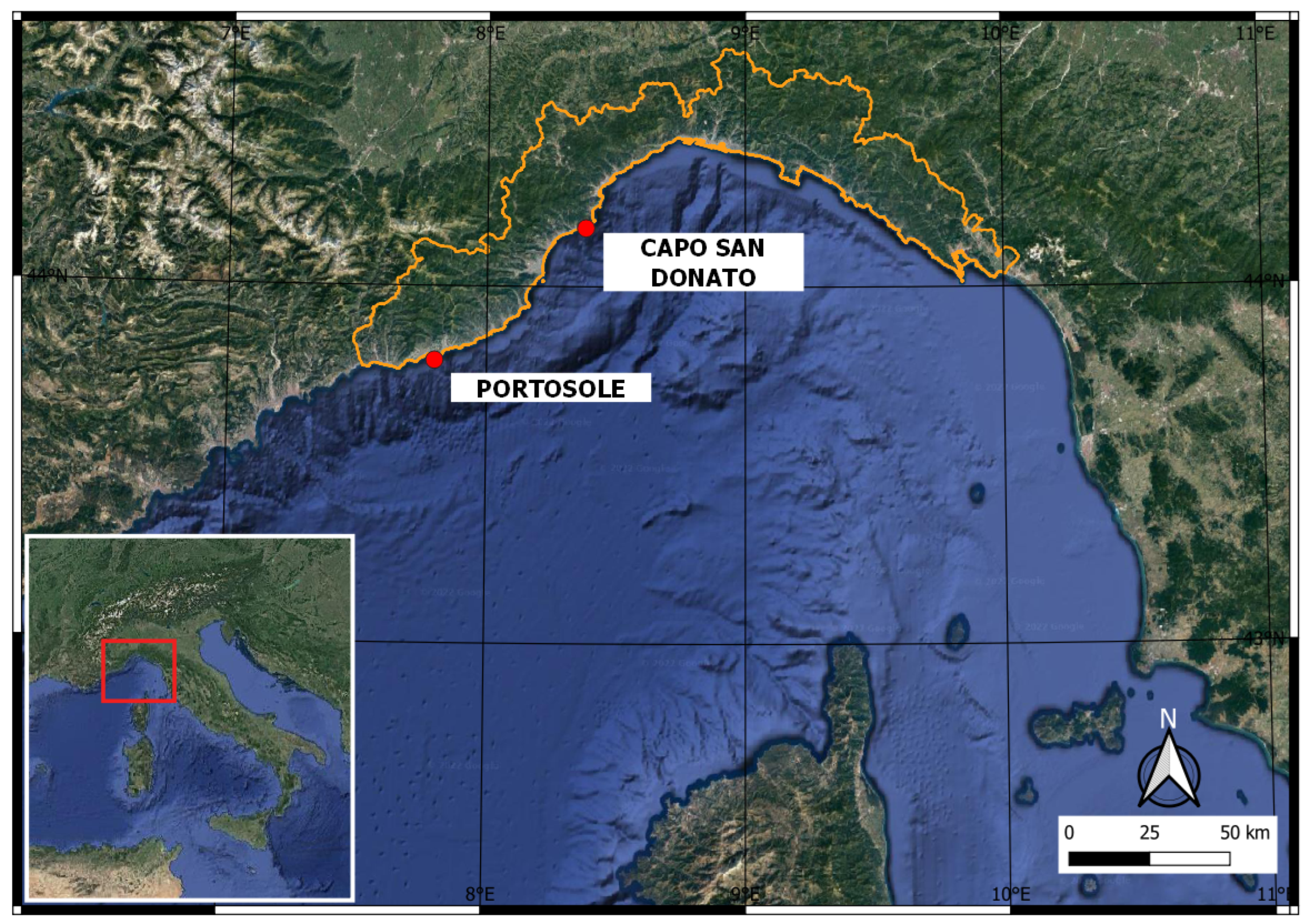
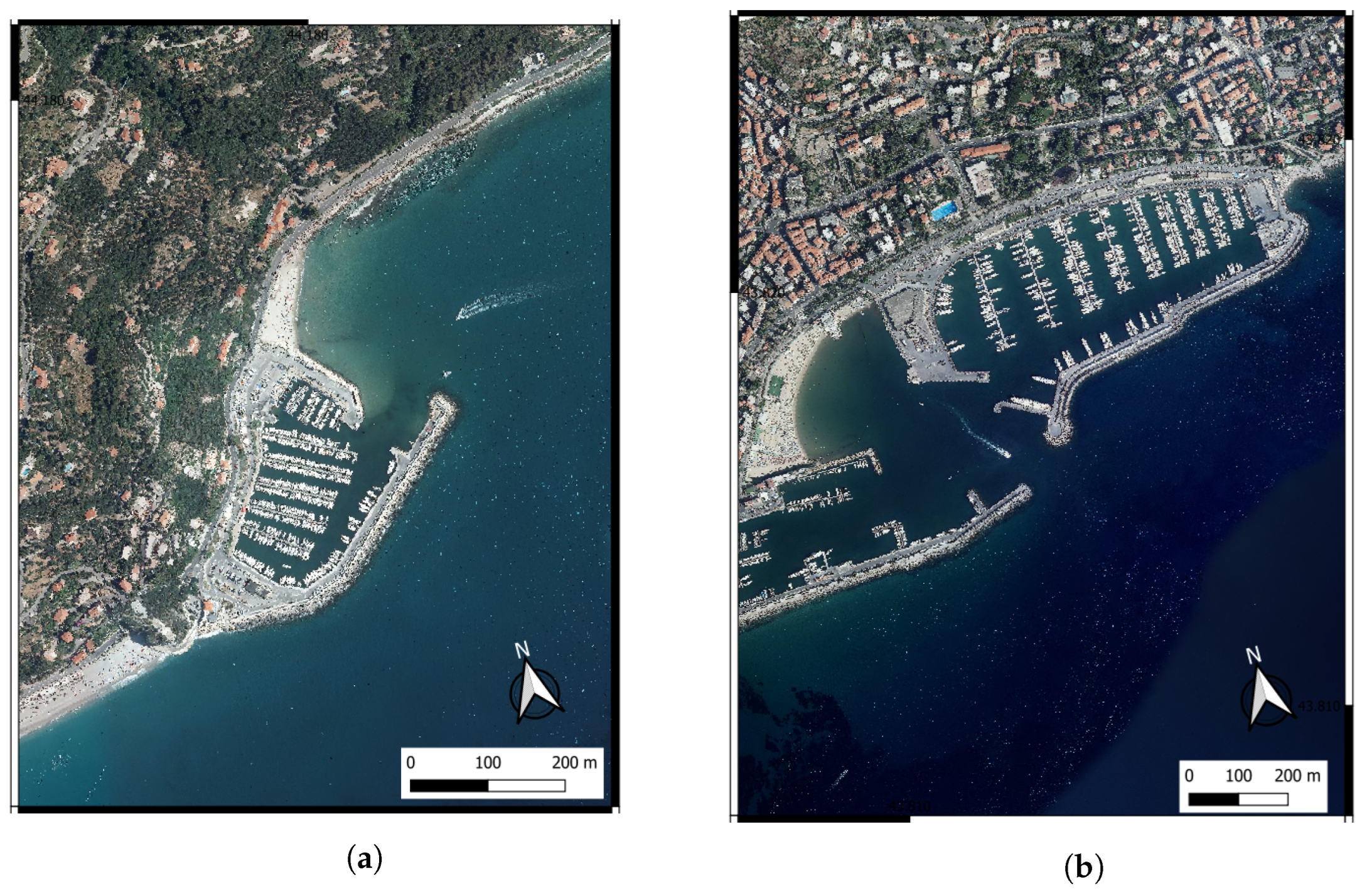
2.1. Study Areas
2.2. Data Selection
2.2.1. UAV-Derived Orthophotos
2.2.2. Aircraft Orthophotos
2.2.3. Sentinel-2 Orthophotos
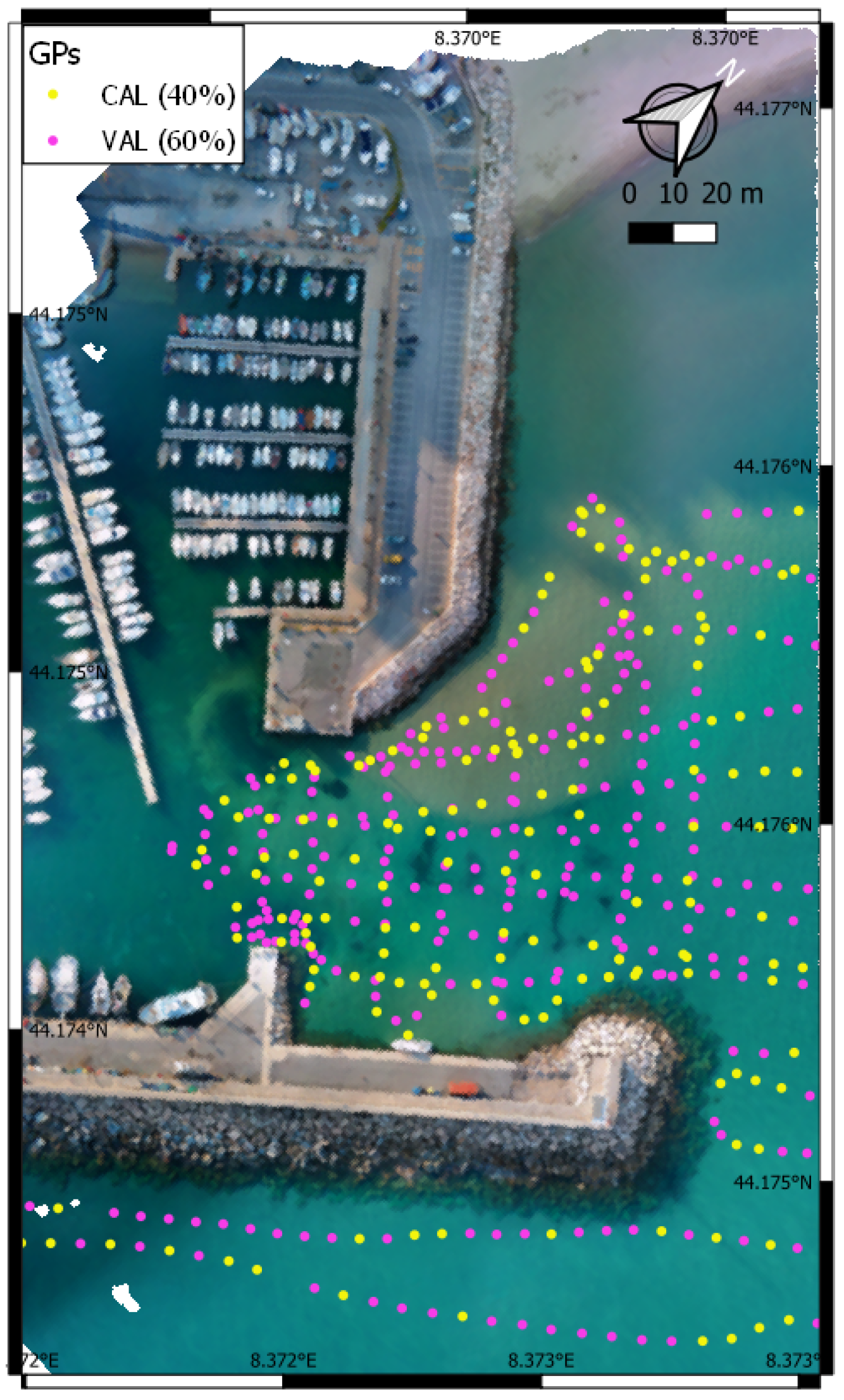
2.3. In Situ Data—Echo Sounding
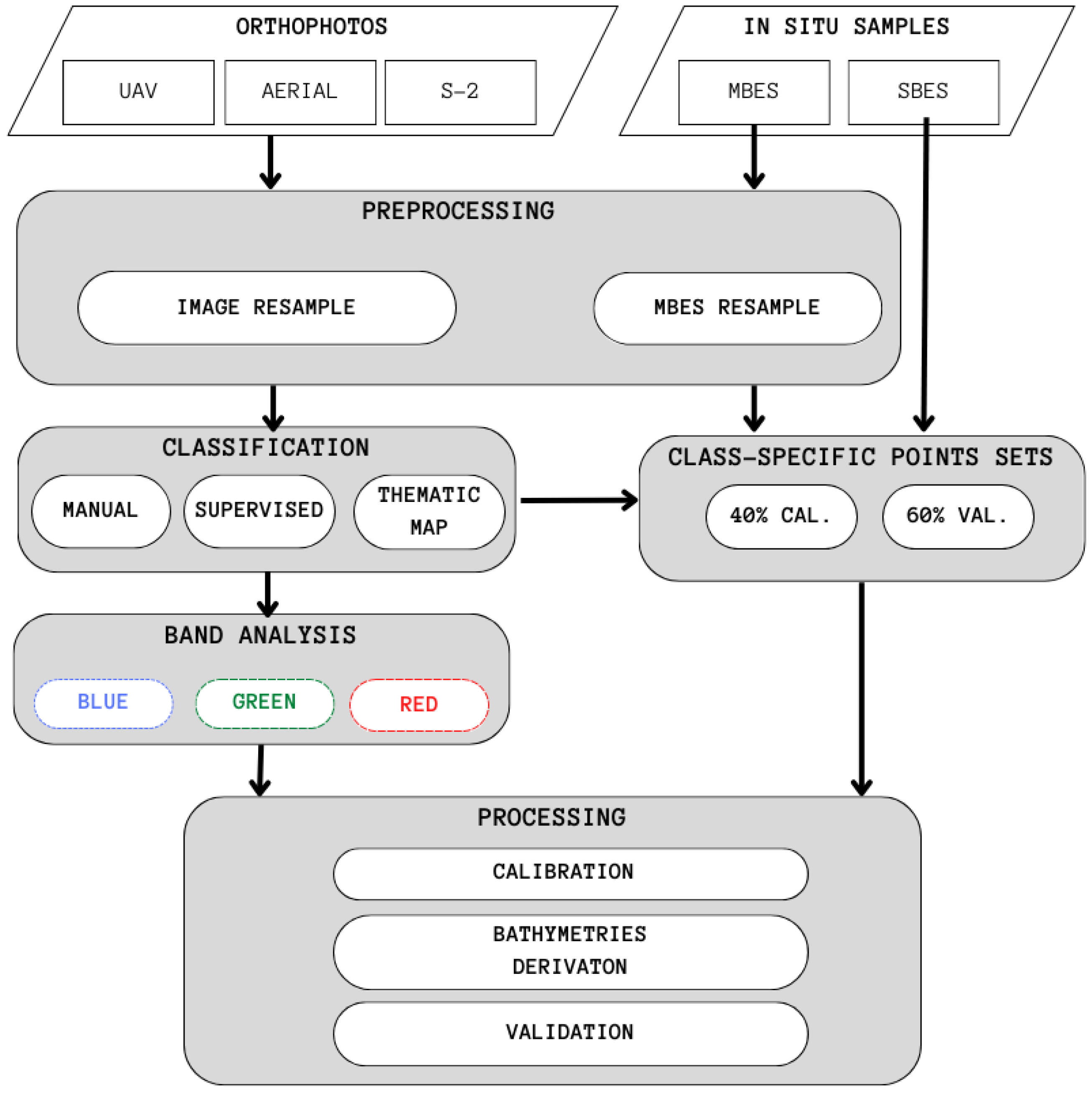
2.4. Remote-Derived Bathymetry Workflow
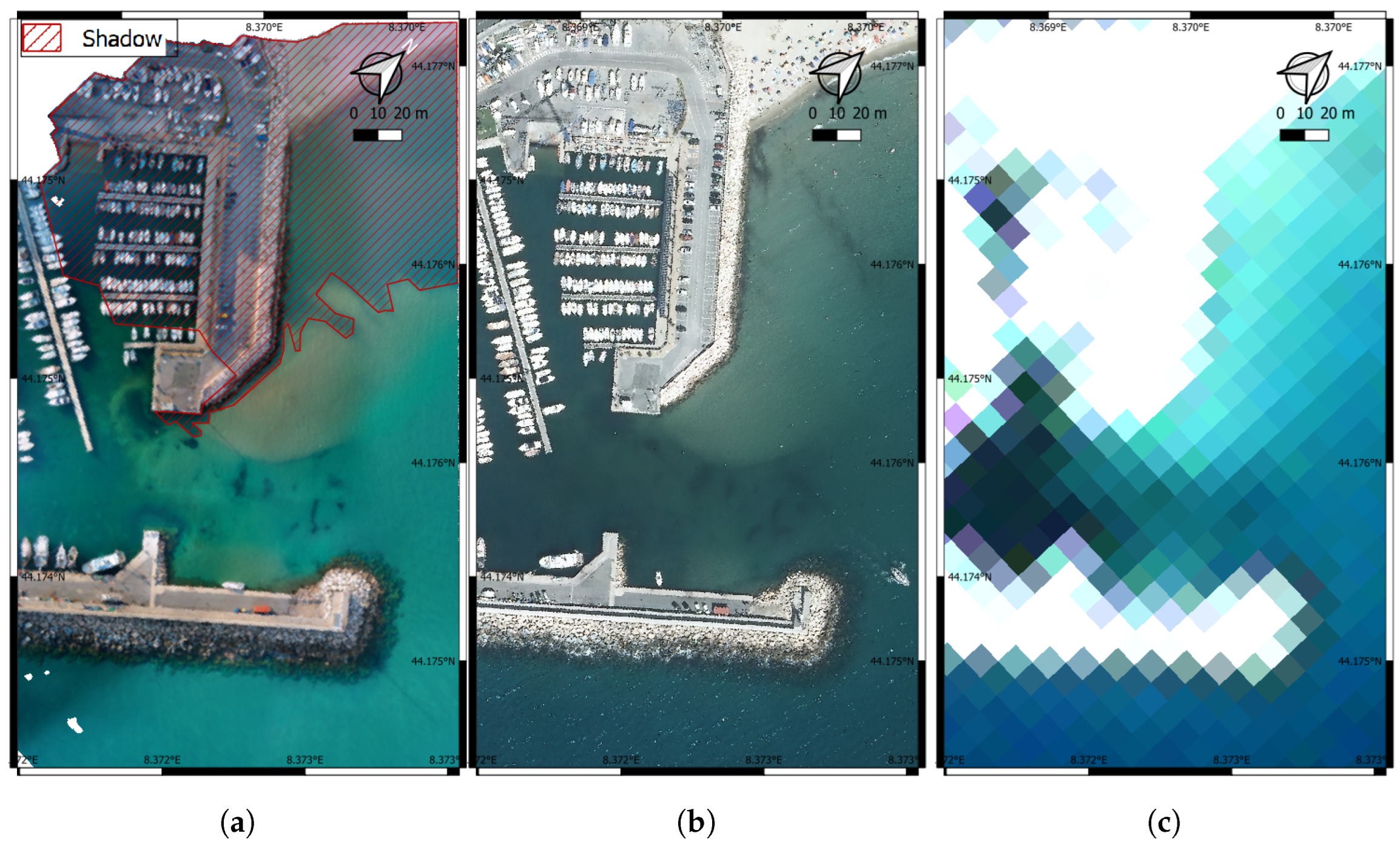
2.4.1. Pre-Processing
2.4.2. Seabed Classification and Cleaning
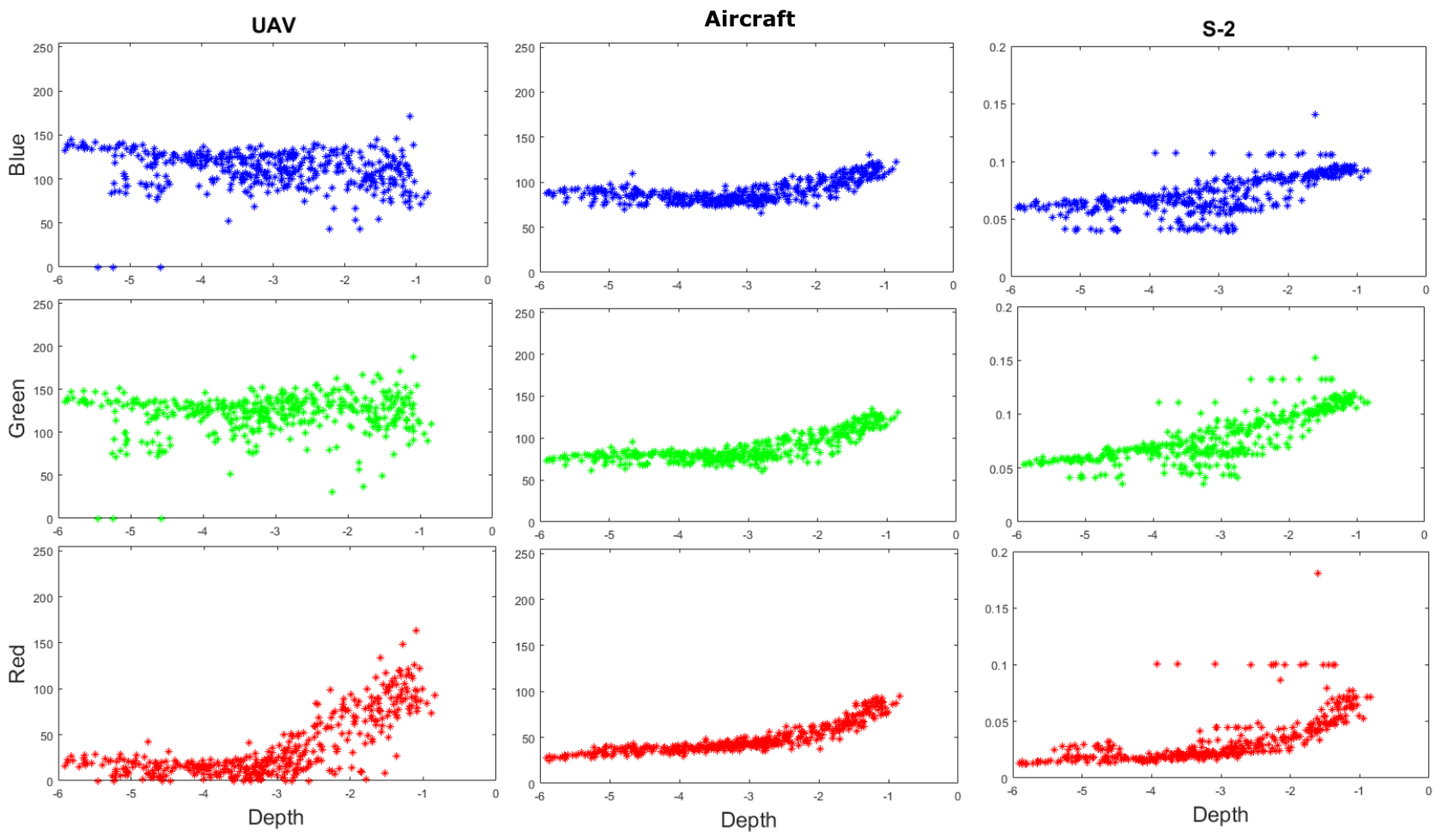
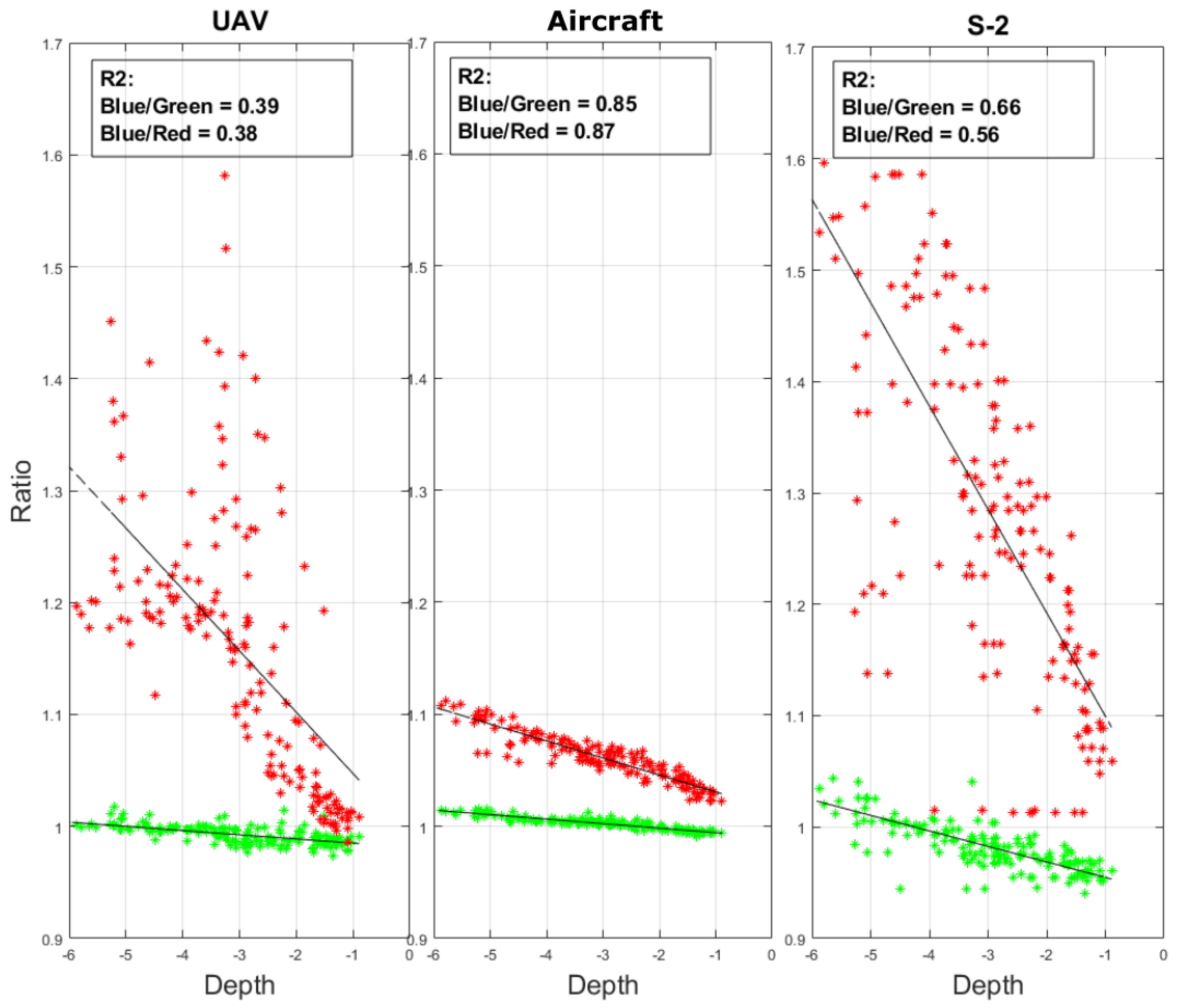
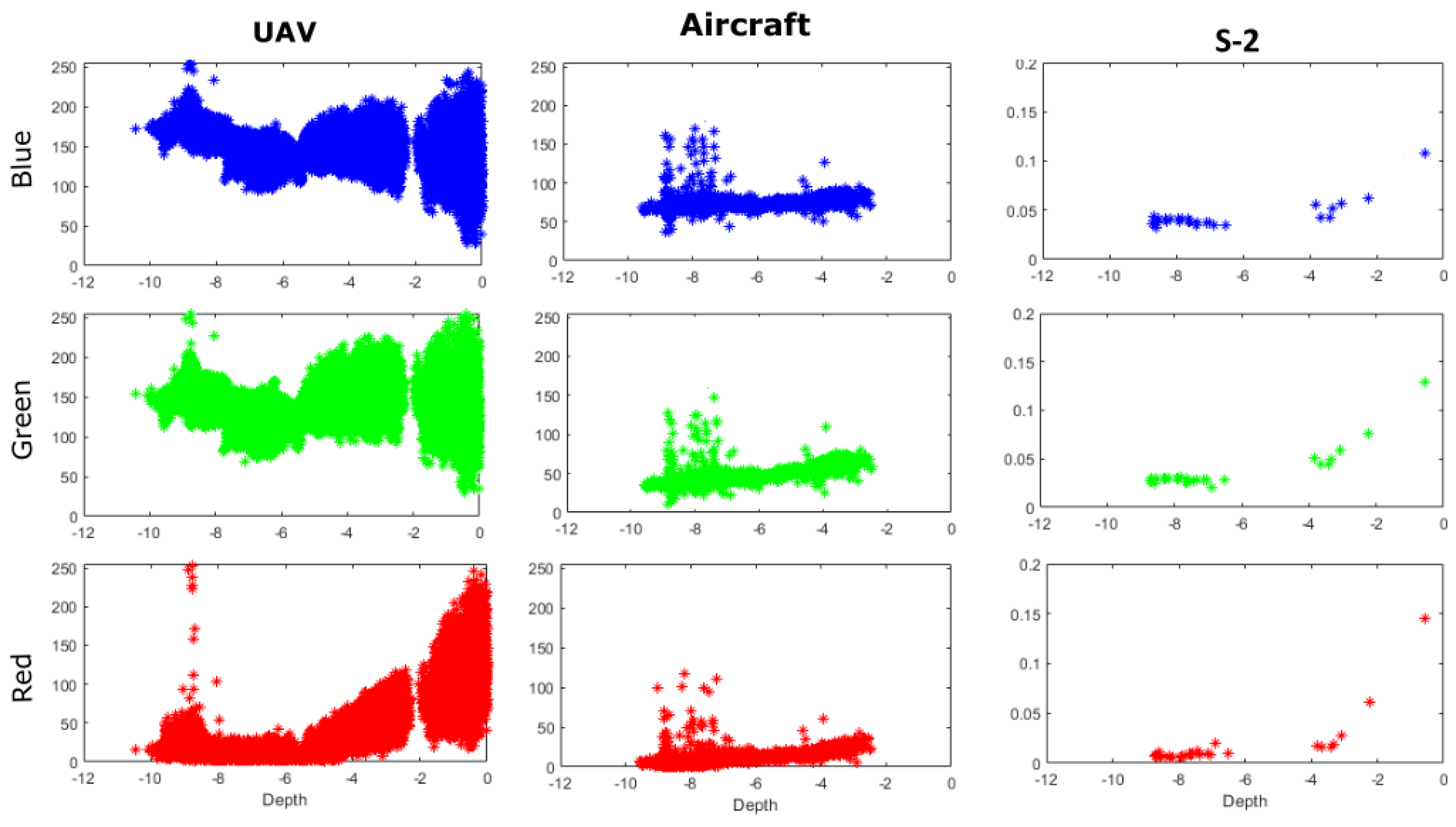
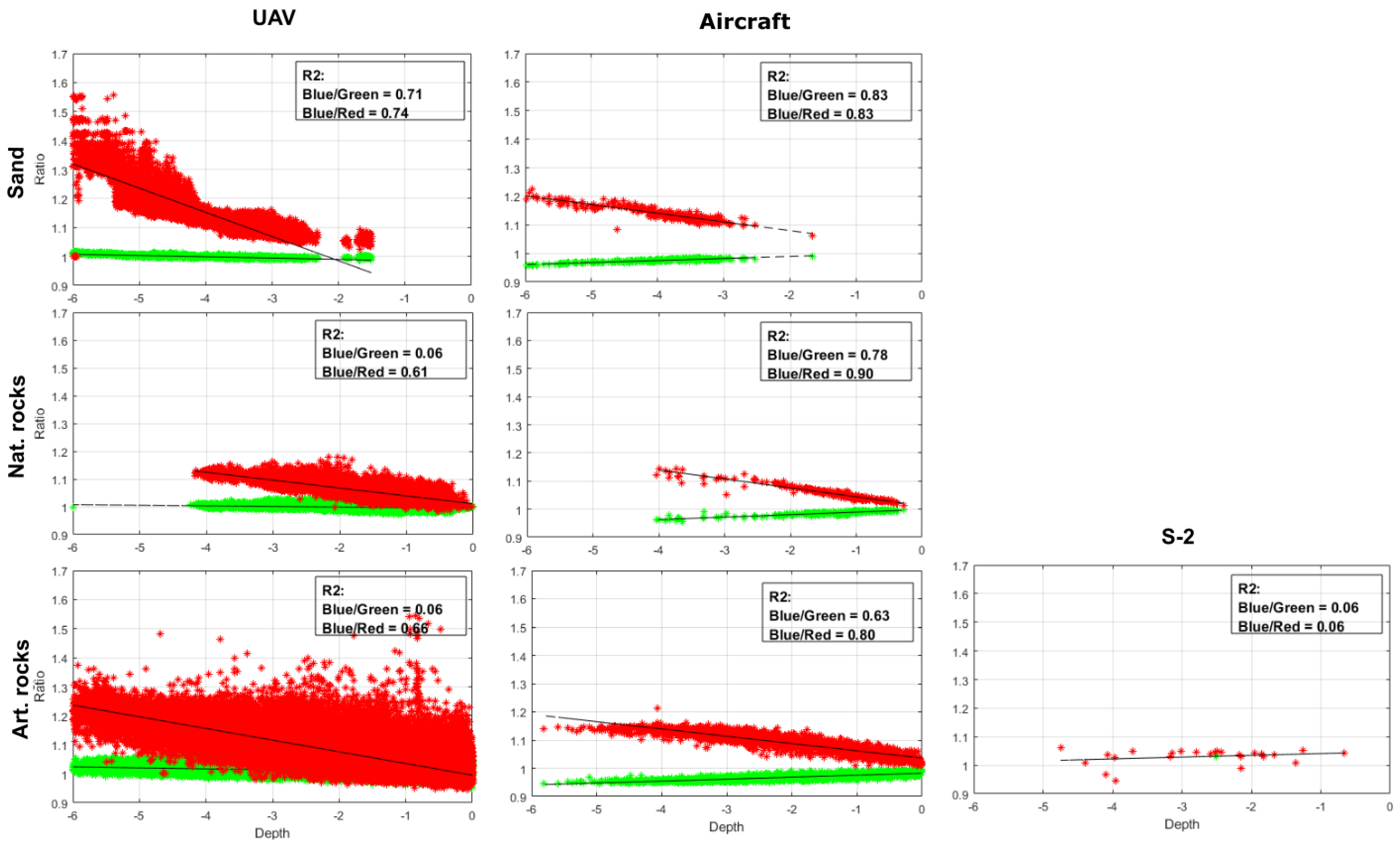
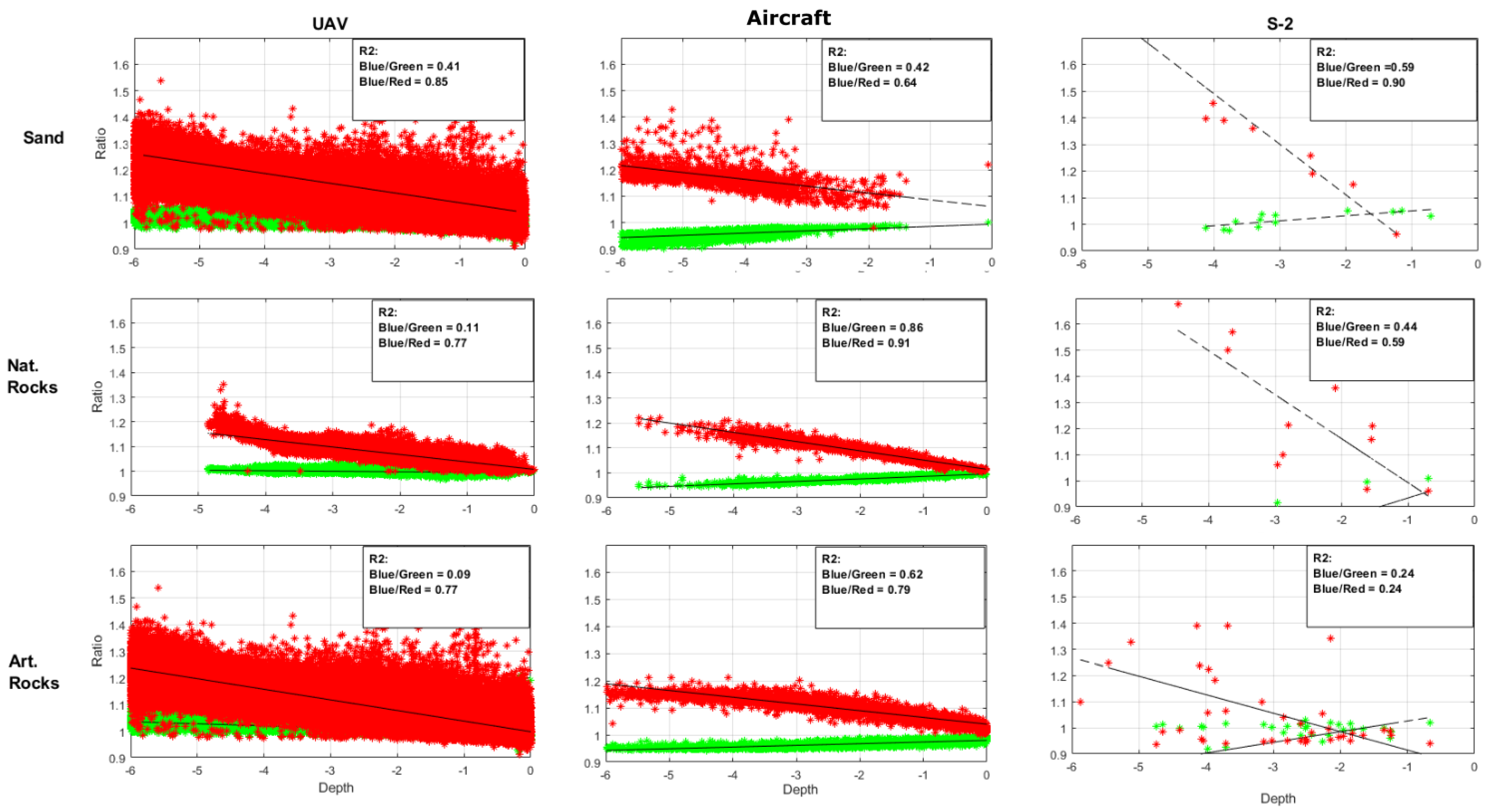
2.4.3. Band Analysis
2.4.4. Processing
3. Results
3.1. Capo San Donato
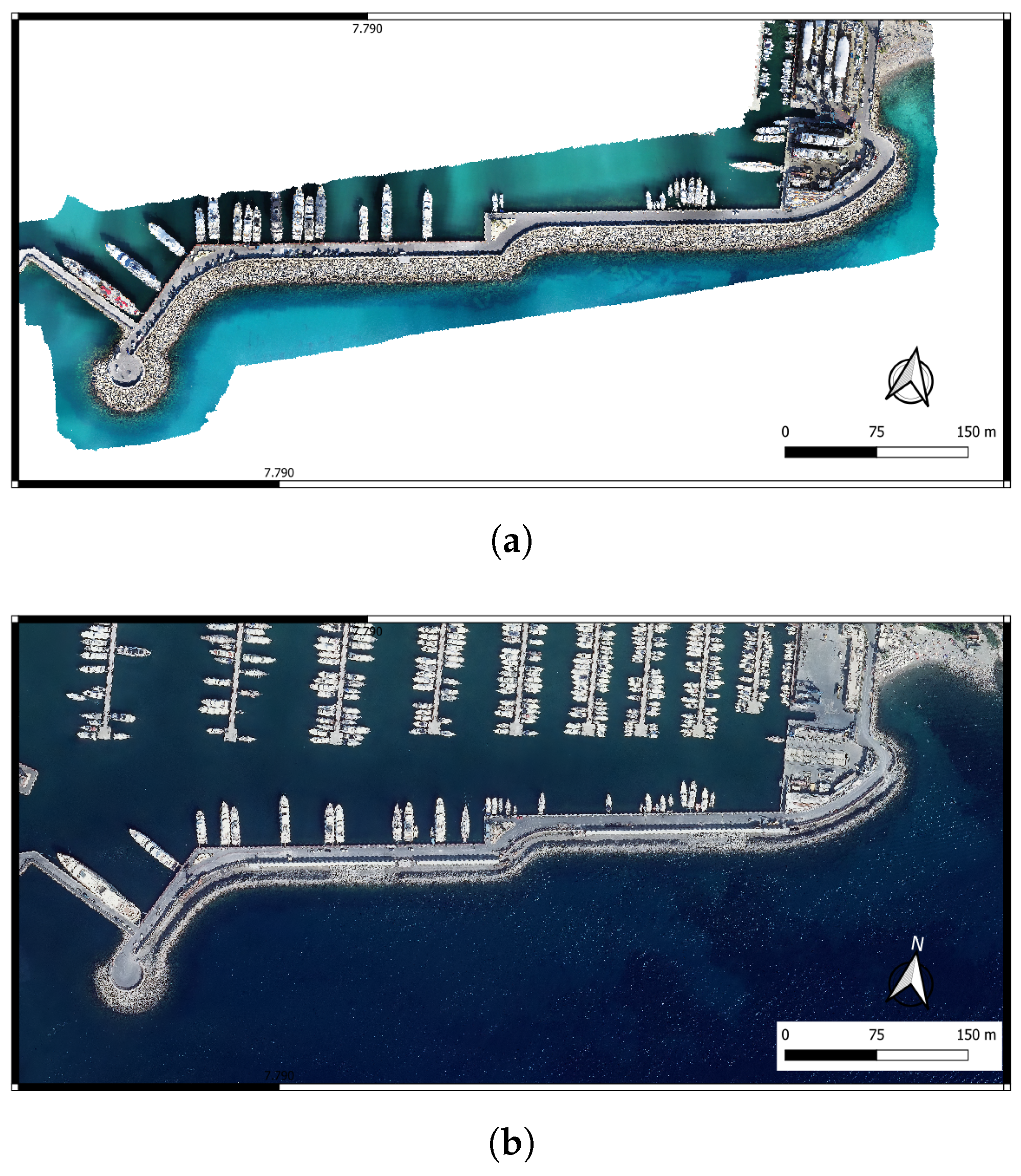
3.2. Portosole
3.2.1. Portosole Overlap Area
3.2.2. Portosole Extended Area
4. Discussion
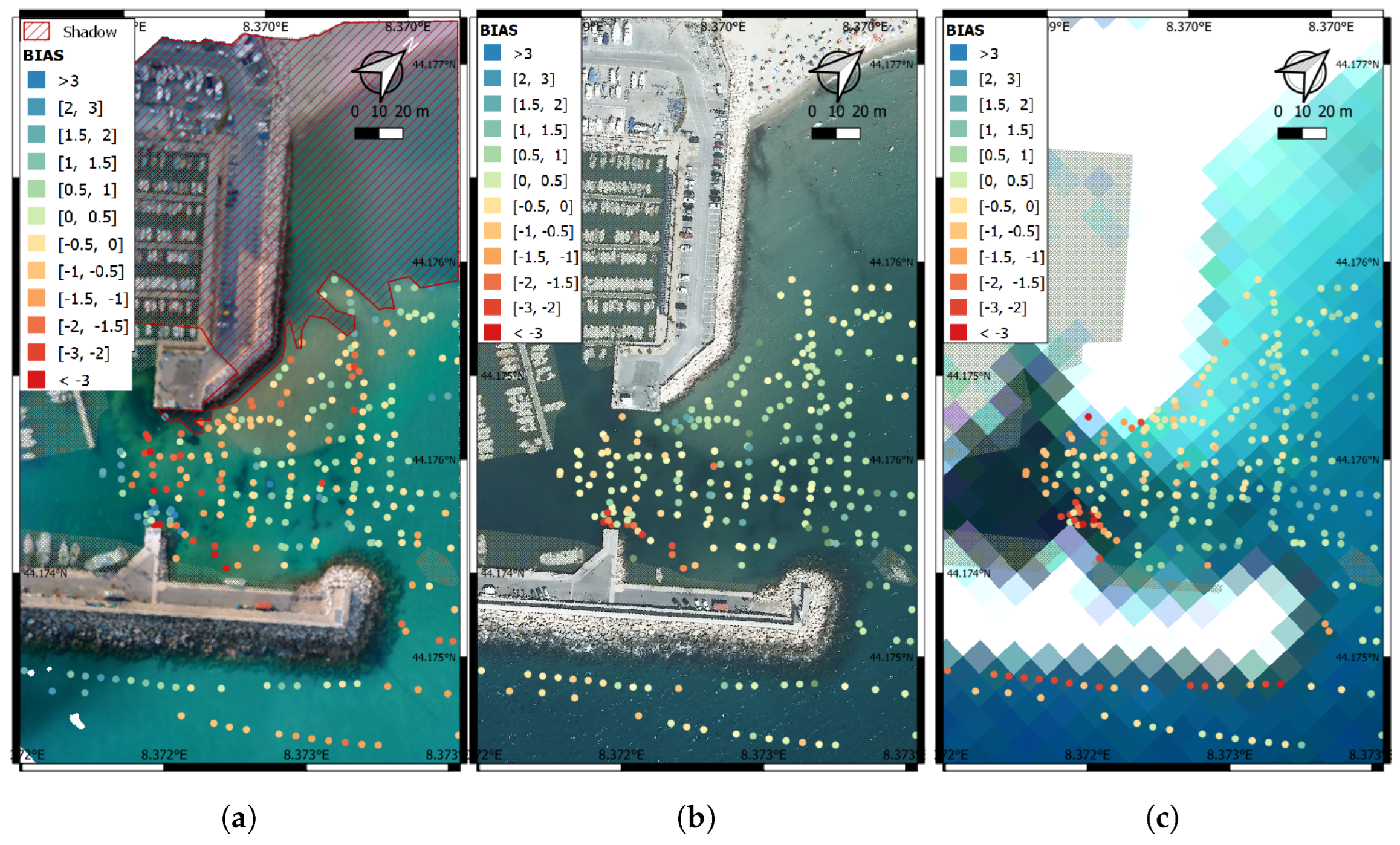
4.1. Results Analysis
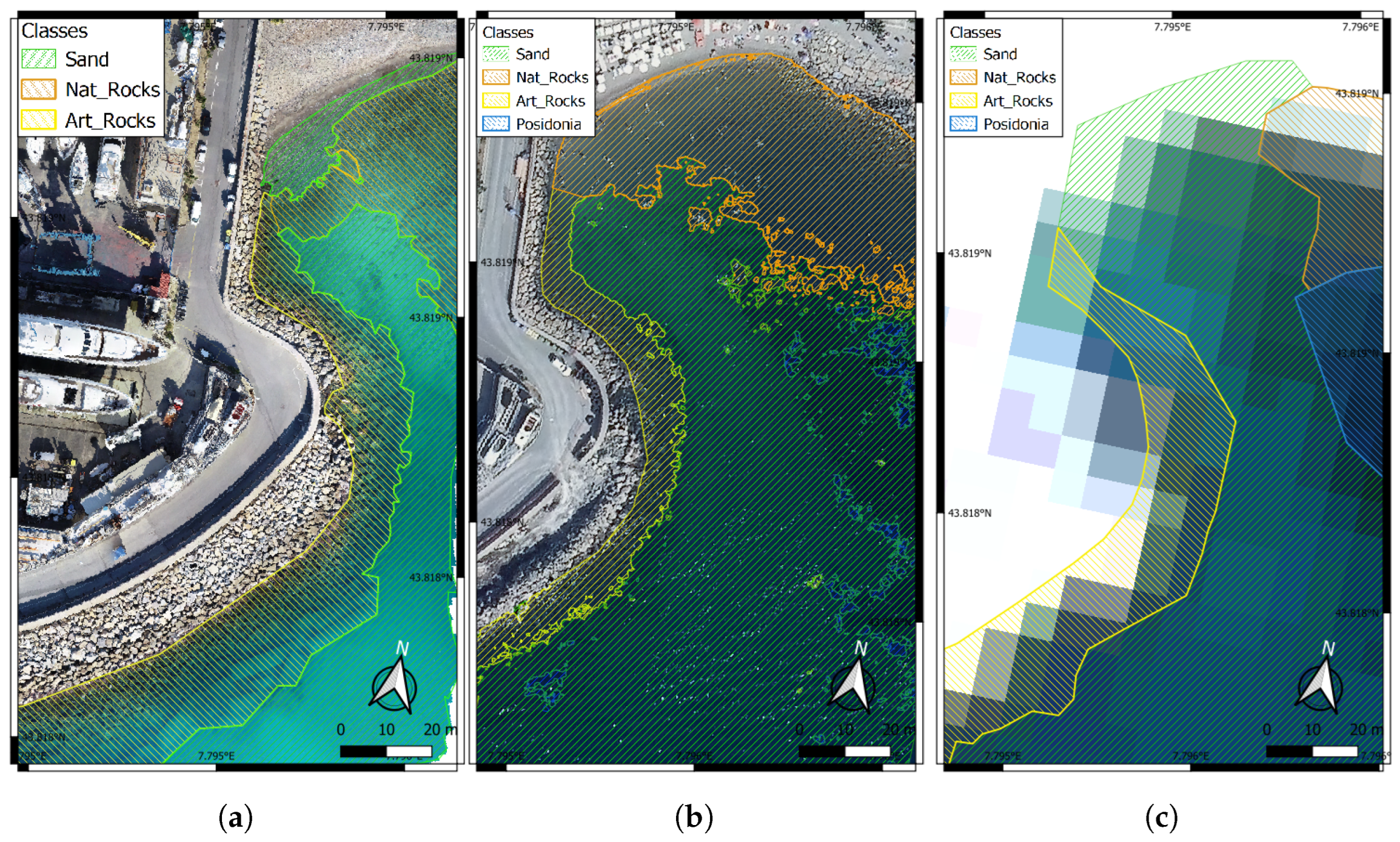
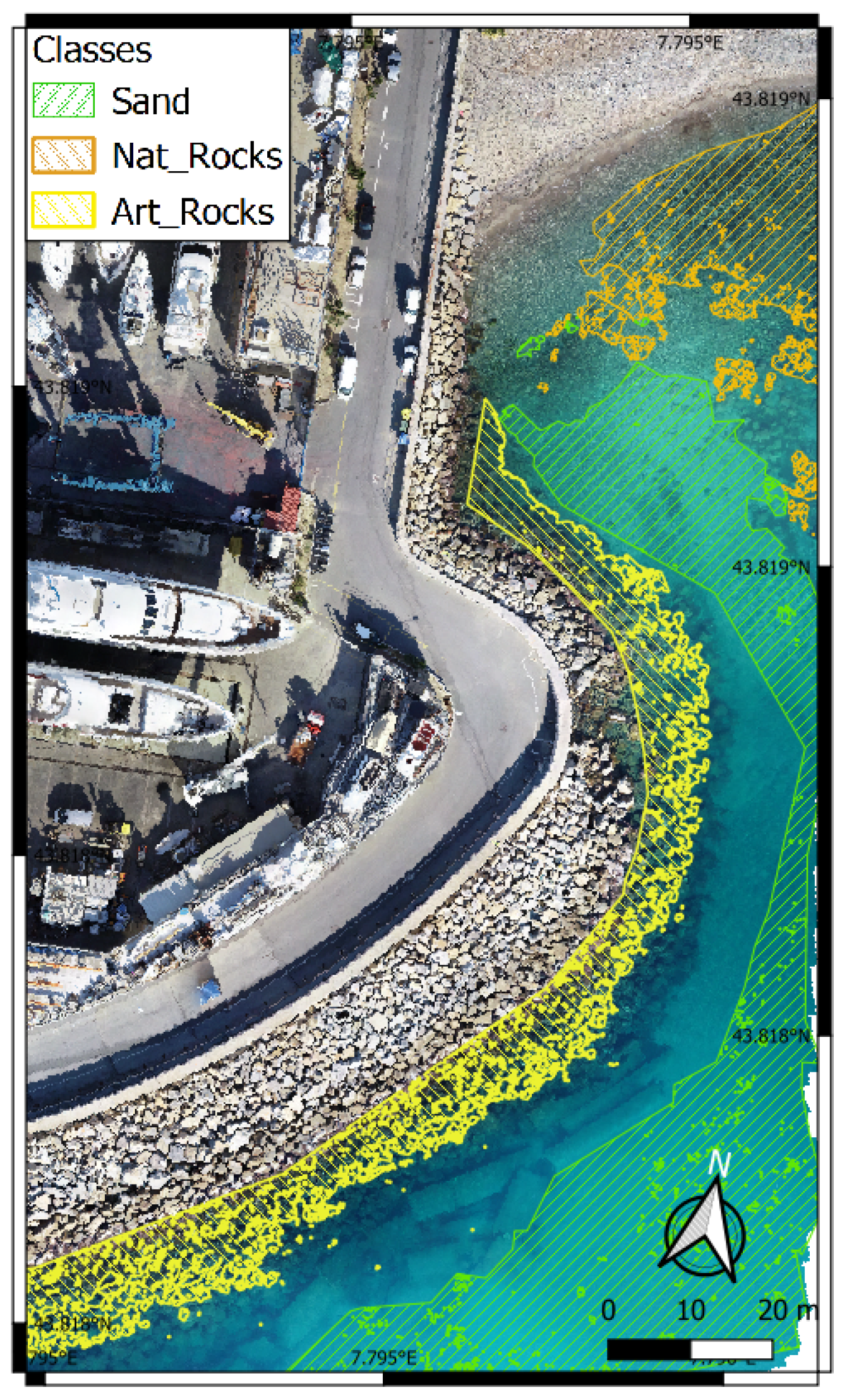
4.2. Seabed Classification
4.3. Platform Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
| 1 | The orthophoto 2019 was produced by RTI CGR S.p.A. and e-Geos S.p.A., commissioned by Agenzia per le Erogazioni in Agricoltura (Agency for Agricultural Disbursement, AGEA) under the “Framework Agreement for remote sensing services for the Integrated Management and Control System and additional remote sensing and cartographic processing services for the three-year period 2018–2020”. |
| 2 | https://scihub.copernicus.eu/dhus/#/home (accessed on 17 March 2023). |
| 3 | |
| 4 | https://grass.osgeo.org/grass82/manuals/i.maxlik.html (accessed on 17 March 2023). |
| 5 | https://grass.osgeo.org/grass82/manuals/i.gensig.html (accessed on 17 March 2023). |
| 6 | https://geoportal.regione.liguria.it/archivio-focus/item/605-nuovo-atlante-habitat-marini-2020.html (accessed on 17 March 2023). |
References
- Newton, A.; Weichselgartner, J. Hotspots of coastal vulnerability: A DPSIR analysis to find societal pathways and responses. Estuar. Coast. Shelf Sci. 2014, 140, 123–133. [Google Scholar] [CrossRef]
- Cavaleri, L.; Barbariol, F.; Bertotti, L.; Besio, G.; Ferrari, F. The 29 October 2018 storm in Northern Italy: Its multiple actions in the Ligurian Sea. Prog. Oceanogr. 2022, 201, 102715. [Google Scholar] [CrossRef]
- Ferrando, I.; Brandolini, P.; Federici, B.; Lucarelli, A.; Sguerso, D.; Morelli, D.; Corradi, N. Coastal modification in relation to sea storm effects: Application of 3D remote sensing survey in Sanremo Marina (Liguria, NW Italy). Water 2021, 13, 1040. [Google Scholar] [CrossRef]
- Smith-Godfrey, S. Defining the Blue Economy. Marit. Aff. J. Natl. Marit. Found. India 2016, 12, 1–7. [Google Scholar] [CrossRef]
- OECD. The Ocean Economy in 2030; OECD: Paris, France, 2016; p. 252. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Ernstsen, V.B.; Noormets, R.; Hebbeln, D.; Bartholomä, A.; Flemming, B. Precision of high-resolution multibeam echo sounding coupled with high-accuracy positioning in a shallow water coastal environment. Geo-Mar. Lett. 2006, 26, 141–149. [Google Scholar] [CrossRef]
- Lanzoni, J.C.; Weber, T.C. High-resolution calibration of a multibeam echo sounder. In Proceedings of the Oceans 2010 MTS/IEEE, Seattle, WA, USA, 20–23 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Mateo-Pérez, V.; Corral-Bobadilla, M.; Ortega-Fernández, F.; Vergara-González, E.P. Port Bathymetry Mapping Using Support Vector Machine Technique and Sentinel-2 Satellite Imagery. Remote Sens. 2020, 12, 2069. [Google Scholar] [CrossRef]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Technical note: Bathymetry observations of inland water bodies using a tethered single-beam sonar controlled by an unmanned aerial vehicle. Hydrol. Earth Syst. Sci. 2018, 22, 4165–4181. [Google Scholar] [CrossRef]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating Satellite-Derived Bathymetry (SDB) with the Google Earth Engine and Sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. On the use of Sentinel-2 satellites and lidar surveys for the change detection of shallow bathymetry: The case study of North Carolina inlets. Coast. Eng. 2021, 169, 103936. [Google Scholar] [CrossRef]
- Tysiac, P. Bringing Bathymetry LiDAR to Coastal Zone Assessment: A Case Study in the Southern Baltic. Remote Sens. 2020, 12, 3740. [Google Scholar] [CrossRef]
- Duplančić Leder, T.; Baučić, M.; Leder, N.; Gilić, F. Optical Satellite-Derived Bathymetry: An Overview and WoS and Scopus Bibliometric Analysis. Remote Sens. 2023, 15, 1294. [Google Scholar] [CrossRef]
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Review of near-shore satellite derived bathymetry: Classification and account of five decades of coastal bathymetry research. J. Ocean. Eng. Sci. 2021, 6, 340–359. [Google Scholar] [CrossRef]
- Santos, D.; Fernández-Fernández, S.; Abreu, T.; Silva, P.A.; Baptista, P. Retrieval of nearshore bathymetry from Sentinel-1 SAR data in high energetic wave coasts: The Portuguese case study. Remote Sens. Appl. Soc. Environ. 2022, 25, 100674. [Google Scholar] [CrossRef]
- Wiehle, S.; Pleskachevsky, A.; Gebhardt, C. Automatic bathymetry retrieval from SAR images. CEAS Space J. 2019, 11, 105–114. [Google Scholar] [CrossRef]
- Brusch, S.; Held, P.; Lehner, S.; Rosenthal, W.; Pleskachevsky, A.L. Underwater bottom topography in coastal areas from TerraSAR-X data. Int. J. Remote Sens. 2011, 32, 4527–4543. [Google Scholar] [CrossRef]
- Babbel, B.J.; Parrish, C.E.; Magruder, L.A. ICESat-2 elevation retrievals in support of satellite-derived bathymetry for global science applications. Geophys. Res. Lett. 2021, 48, e2020GL090629. [Google Scholar] [CrossRef]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef]
- Jasinski, M.F.; Stoll, J.D.; Cook, W.B.; Ondrusek, M.; Stengel, E.; Brunt, K. Inland and Near-Shore Water Profiles Derived from the High-Altitude Multiple Altimeter Beam Experimental Lidar (MABEL). J. Coast. Res. 2016, 76, 44–55. [Google Scholar] [CrossRef]
- Evagorou, E.; Argyriou, A.; Papadopoulos, N.; Mettas, C.; Alexandrakis, G.; Hadjimitsis, D. Evaluation of Satellite-Derived Bathymetry from High and Medium-Resolution Sensors Using Empirical Methods. Remote Sens. 2022, 14, 772. [Google Scholar] [CrossRef]
- Najar, M.A.; Benshila, R.; Bennioui, Y.E.; Thoumyre, G.; Almar, R.; Bergsma, E.W.; Delvit, J.M.; Wilson, D.G. Coastal Bathymetry Estimation from Sentinel-2 Satellite Imagery: Comparing Deep Learning and Physics-Based Approaches. Remote Sens. 2022, 14, 1196. [Google Scholar] [CrossRef]
- Daly, C.; Baba, W.; Bergsma, E.; Thoumyre, G.; Almar, R.; Garlan, T. The new era of regional coastal bathymetry from space: A showcase for West Africa using optical Sentinel-2 imagery. Remote Sens. Environ. 2022, 278, 113084. [Google Scholar] [CrossRef]
- Wang, J.; Chen, M.; Zhu, W.; Hu, L.; Wang, Y. A Combined Approach for Retrieving Bathymetry from Aerial Stereo RGB Imagery. Remote Sens. 2022, 14, 760. [Google Scholar] [CrossRef]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. Earth Environ. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef]
- Klonowski, W.M.; Fearns, P.R.; Lynch, M.J. Retrieving key benthic cover types and bathymetry from hyperspectral imagery. J. Appl. Remote Sens. 2007, 1, 011505. [Google Scholar] [CrossRef]
- Bergsma, E.W.; Almar, R.; de Almeida, L.P.M.; Sall, M. On the operational use of UAVs for video-derived bathymetry. Coast. Eng. 2019, 152, 103527. [Google Scholar] [CrossRef]
- Alevizos, E.; Oikonomou, D.; Argyriou, A.V.; Alexakis, D.D. Fusion of Drone-Based RGB and Multi-Spectral Imagery for Shallow Water Bathymetry Inversion. Remote Sens. 2022, 14, 1127. [Google Scholar] [CrossRef]
- Rossi, L.; Mammi, I.; Pelliccia, F. UAV-Derived Multispectral Bathymetry. Remote Sens. 2020, 12, 3897. [Google Scholar] [CrossRef]
- Mandlburger, G.; Kölle, M.; Nübel, H.; Soergel, U. BathyNet: A deep neural network for water depth mapping from multispectral aerial images. PFG-J. Photogramm. Remote Sens. Geoinf. Sci. 2021, 89, 71–89. [Google Scholar] [CrossRef]
- Mount, R. Acquisition of through-water aerial survey images. Photogramm. Eng. Remote Sens. 2005, 71, 1407–1415. [Google Scholar] [CrossRef]
- Lubac, B.; Burvingt, O.; Nicolae Lerma, A.; Sénéchal, N. Performance and Uncertainty of Satellite-Derived Bathymetry Empirical Approaches in an Energetic Coastal Environment. Remote Sens. 2022, 14, 2350. [Google Scholar] [CrossRef]
- Sagawa, T.; Yamashita, Y.; Okumura, T.; Yamanokuchi, T. Satellite derived bathymetry using machine learning and multi-temporal satellite images. Remote Sens. 2019, 11, 1155. [Google Scholar] [CrossRef]
- Hamylton, S.M.; Hedley, J.D.; Beaman, R.J. Derivation of high-resolution bathymetry from multispectral satellite imagery: A comparison of empirical and optimisation methods through geographical error analysis. Remote Sens. 2015, 7, 16257–16273. [Google Scholar] [CrossRef]
- Figliomeni, F.G.; Parente, C. Bathymetry from satellite images: A proposal for adapting the band ratio approach to IKONOS data. Appl. Geomat. 2022, 1–17. [Google Scholar] [CrossRef]
- Monteys, X.; Harris, P.; Caloca, S.; Cahalane, C. Spatial prediction of coastal bathymetry based on multispectral satellite imagery and multibeam data. Remote Sens. 2015, 7, 13782–13806. [Google Scholar] [CrossRef]
- Leder, T.D.; Duplančić Leder, T. Optimal Conditions for Satellite Derived Bathymetry (SDB)—Case Study of the Adriatic Sea. In Proceedings of the FIG Working Week, Amsterdam, The Netherlands, 10–14 May 2020; pp. 10–14. [Google Scholar]
- Vargas, R.; Wasserman, J.C.d.F.A.; da Silva, A.L.; Tavares, T.L.; Américo, C.; dos Santos, F.F.D. Satellite-Derived Bathymetry models from Sentinel-2A and 2B in the coastal clear waters of Arraial do Cabo, Rio de Janeiro, Brazil. Rev. Bras. Geogr. Fis. 2021, 1, 3078–3095. [Google Scholar] [CrossRef]
- Yang, H.; Ju, J.; Guo, H.; Qiao, B.; Nie, B.; Zhu, L. Bathymetric Inversion and Mapping of Two Shallow Lakes Using Sentinel-2 Imagery and Bathymetry Data in the Central Tibetan Plateau. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 4279–4296. [Google Scholar] [CrossRef]
- Casal, G.; Hedley, J.D.; Monteys, X.; Harris, P.; Cahalane, C.; McCarthy, T. Satellite-derived bathymetry in optically complex waters using a model inversion approach and Sentinel-2 data. Estuar. Coast. Shelf Sci. 2020, 241, 106814. [Google Scholar] [CrossRef]
- Westley, K. Satellite-derived bathymetry for maritime archaeology: Testing its effectiveness at two ancient harbours in the Eastern Mediterranean. J. Archaeol. Sci. Rep. 2021, 38, 103030. [Google Scholar] [CrossRef]
- Agisoft Metashape ©. Available online: https://www.agisoft.com (accessed on 6 March 2023).
- Regione Liguria Geoportal. Available online: https://geoportal.regione.liguria.it/ (accessed on 11 November 2022).
- Apicella, L.; De Martino, M.; Quarati, A. Copernicus User Uptake: From Data to Applications. Isprs Int. J. Geo-Inf. 2022, 11, 121. [Google Scholar] [CrossRef]
- Sentinel-2 User Handbook ©. Available online: https://sentinels.copernicus.eu/web/sentinel/user-guides/document-library/-/asset_publisher/xlslt4309D5h/content/sentinel-2-user-handbook (accessed on 13 September 2022).
- Teledyne Reson PDS2000. Available online: http://www.teledynemarine.com/pds (accessed on 1 September 2022).
- Lucarelli, A.; Brandolini, P.; Corradi, N.; De Laurentiis, L.; Federici, B.; Ferrando, I.; Lanzone, A.; Sguerso, D. Potentialities of integrated 3D surveys applied to maritime infrastructures and to the study of morphological/sedimentary dynamics of the seabed. In Proceedings of the IMEKO TC-19 International Workshop on Metrology for the Sea, Genoa, Italy, 3–5 October 2019; pp. 161–166. [Google Scholar]
- Sentinel Application Platform (SNAP). ESA. Available online: https://step.esa.int/main/toolboxes/snap (accessed on 17 March 2023).
- QGIS Development Team. QGIS Geographic Information System. Available online: https://www.qgis.org (accessed on 30 November 2022).
- GRASS Development Team. Geographic Resources Analysis Support System (GRASS) Software. Open Source Geospatial Foundation. Available online: grass.osgeo.org (accessed on 30 November 2022).
- Lemenkova, P. GRASS GIS for classification of Landsat TM images by maximum likelihood discriminant analysis: Tokyo area, Japan. Geod. Glas. 2020, 51, 5–25. [Google Scholar] [CrossRef]
- Alevizos, E.; Alexakis, D.D. Evaluation of radiometric calibration of drone-based imagery for improving shallow bathymetry retrieval. Remote Sens. Lett. 2022, 13, 311–321. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)?–Arguments against avoiding RMSE in the literature. Geosci. Model Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Kara, A.B.; Wallcraft, A.J.; Hurlburt, H.E. A new solar radiation penetration scheme for use in ocean mixed layer studies: An application to the Black Sea using a fine-resolution hybrid coordinate ocean model (HYCOM). J. Phys. Oceanogr. 2005, 35, 13–32. [Google Scholar] [CrossRef]
- Lalli, C.; Parsons, T. Biological Oceanography: An Introduction; Elsevier: Amsterdam, The Netherlands, 1997. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Spatial Resolution | Acquisition Date | Flight/Orbital Altitude | |
|---|---|---|---|---|
| Ortophotos | UAV | 0.02 m | April 2019 | 30 m |
| Aircraft | 0.2 m | Summer 2019 | 3400 m | |
| S-2 | 10 m | April 2019 | 800 km | |
| GPs | SBES | 10 m | April 2019 |
| Data | Spatial Resolution | Acquisition Date | Flight/Orbital Altitude | |
|---|---|---|---|---|
| Ortophotos | UAV | 0.02 m | February 2019 | 35 m |
| Aircraft | 0.2 m | Summer 2019 | 3400 m | |
| S-2 | 10 m | February 2019 | 800 km | |
| GPs | MBES | 0.02 m | February 2019 |
| BLUE/GREEN | BLUE/RED | ||
|---|---|---|---|
| UAV | RMSE | 1.53 | 1.88 |
| MAE | 1.13 | 1.40 | |
| BIAS AVG | −0.16 | 0.48 | |
| BIAS STD | 1.52 | 1.87 | |
| Aircraft | RMSE | 0.71 | 0.52 |
| MAE | 0.60 | 0.39 | |
| BIAS AVG | −0.44 | −0.08 | |
| BIAS STD | 0.56 | 0.51 | |
| S-2 | RMSE | 0.95 | 1.05 |
| MAE | 0.71 | 0.78 | |
| BIAS AVG | −0.38 | −0.12 | |
| BIAS STD | 0.87 | 1.04 |
| SAND | NAT. ROCK | ART. ROCK | ||||
|---|---|---|---|---|---|---|
| Cal. | Val. | Cal. | Val. | Cal. | Val. | |
| UAV | 28,964 | 43,402 | 24,325 | 36,077 | 211,658 | 317,786 |
| Aircraft | 297 | 430 | 257 | 359 | 2097 | 3233 |
| S-2 | 4 | 5 | - | - | 25 | 28 |
| SAND | NAT. ROCK | ART. ROCK | |||||
|---|---|---|---|---|---|---|---|
| BLUE/GREEN | BLUE/RED | BLUE/GREEN | BLUE/RED | BLUE/GREEN | BLUE/RED | ||
| UAV | RMSE | 0.54 | 0.51 | 2.52 | 0.68 | 5.01 | 0.85 |
| MAE | 0.43 | 0.43 | 1.75 | 0.51 | 3.35 | 0.65 | |
| BIAS AVG | −0.26 | −0.31 | 1.06 | 0.36 | 2.21 | −0.19 | |
| BIAS STD | 0.47 | 0.41 | 2.29 | 0.57 | 4.49 | 0.83 | |
| Aircraft | RMSE | 0.52 | 0.60 | 0.44 | 0.46 | 1.05 | 0.92 |
| MAE | 0.45 | 0.53 | 0.33 | 0.41 | 0.82 | 0.77 | |
| BIAS AVG | −0.40 | −0.51 | 0.23 | 0.38 | −0.49 | −0.71 | |
| BIAS STD | 0.33 | 0.31 | 0.38 | 0.25 | 0.93 | 0.58 | |
| S-2 | RMSE | - | - | - | - | 3.52 | 3.44 |
| MAE | - | - | - | - | 2.80 | 2.49 | |
| BIAS AVG | - | - | - | - | −0.72 | 0.30 | |
| BIAS STD | - | - | - | - | 3.51 | 3.49 | |
| SAND | NAT. ROCK | ART. ROCK | ||||
|---|---|---|---|---|---|---|
| Cal. | Val. | Cal. | Val. | Cal. | Val. | |
| UAV | 40,252 | 60,754 | 47,059 | 68,253 | 427,636 | 642,000 |
| Aircraft | 1683 | 2474 | 1741 | 2555 | 3496 | 5311 |
| S-2 | 13 | 17 | 11 | 24 | 41 | 63 |
| SAND | NAT. ROCK | ART. ROCK | |||||
|---|---|---|---|---|---|---|---|
| BLUE/GREEN | BLUE/RED | BLUE/GREEN | BLUE/RED | BLUE/GREEN | BLUE/RED | ||
| UAV | RMSE | 1.94 | 0.96 | 2.85 | 0.60 | 5.37 | 0.91 |
| MAE | 1.62 | 0.73 | 2.17 | 0.44 | 4.04 | 0.68 | |
| BIAS AVG. | 0.32 | 0.69 | −0.02 | 0.24 | −0.37 | −0.07 | |
| BIAS STD | 1.95 | 0.66 | 2.82 | 0.54 | 5.35 | 0.90 | |
| Aircraft | RMSE | 1.11 | 0.7 | 0.61 | 0.51 | 1.15 | 0.92 |
| MAE | 0.94 | 0.57 | 0.49 | 0.41 | 0.92 | 0.73 | |
| BIAS AVG. | 0.16 | −0.05 | 0.38 | 0.37 | 0.18 | 0.56 | |
| BIAS STD | 1.09 | 0.70 | 0.46 | 0.36 | 1.13 | 0.73 | |
| S-2 | RMSE | 1.0 | 0.74 | 1.03 | 1.28 | 1.98 | 1.95 |
| MAE | 0.89 | 0.60 | 0.90 | 1.11 | 1.44 | 1.45 | |
| BIAS AVG. | 0.72 | 0.57 | −0.14 | −1.12 | 1.98 | 0.19 | |
| BIAS STD | 0.88 | 0.47 | 1.03 | 0.62 | 1.96 | 1.95 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Apicella, L.; De Martino, M.; Ferrando, I.; Quarati, A.; Federici, B. Deriving Coastal Shallow Bathymetry from Sentinel 2-, Aircraft- and UAV-Derived Orthophotos: A Case Study in Ligurian Marinas. J. Mar. Sci. Eng. 2023, 11, 671. https://doi.org/10.3390/jmse11030671
Apicella L, De Martino M, Ferrando I, Quarati A, Federici B. Deriving Coastal Shallow Bathymetry from Sentinel 2-, Aircraft- and UAV-Derived Orthophotos: A Case Study in Ligurian Marinas. Journal of Marine Science and Engineering. 2023; 11(3):671. https://doi.org/10.3390/jmse11030671
Chicago/Turabian StyleApicella, Lorenza, Monica De Martino, Ilaria Ferrando, Alfonso Quarati, and Bianca Federici. 2023. "Deriving Coastal Shallow Bathymetry from Sentinel 2-, Aircraft- and UAV-Derived Orthophotos: A Case Study in Ligurian Marinas" Journal of Marine Science and Engineering 11, no. 3: 671. https://doi.org/10.3390/jmse11030671
APA StyleApicella, L., De Martino, M., Ferrando, I., Quarati, A., & Federici, B. (2023). Deriving Coastal Shallow Bathymetry from Sentinel 2-, Aircraft- and UAV-Derived Orthophotos: A Case Study in Ligurian Marinas. Journal of Marine Science and Engineering, 11(3), 671. https://doi.org/10.3390/jmse11030671